Embed Size (px)
Citation preview

Robotic Mastoidectomy
Andrei Danilchenko, B.S.,Graduate Student, Dept. of Electrical Engineering and Computer Science, Vanderbilt University,Nashville, TN
Ramya Balachandran, Ph.D.,Dept. of Otolaryngology, Vanderbilt University Medical Center, Nashville, TN
Jenna L Toennies, B.S.,Graduate Student, Dept. of Mechanical Engineering, Vanderbilt University, Nashville, TN
Stephan Baron, Dipl.-Ing,Institute of Mechatronic Systems, Leibniz Universitat Hannover, Hanover, Germany
Benjamin Munske,Institute of Mechatronic Systems, Leibniz Universitat Hannover, Hanover, Germany
J. Michael Fitzpatrick, Ph.D.,Dept. of Electrical Engineering and Computer Science, Vanderbilt University, Nashville, TN
Thomas J. Withrow, Ph.D.,Dept. of Mechanical Engineering, Vanderbilt University, Nashville, TN
Robert J Webster III, Ph.D., andDept. of Mechanical Engineering, Vanderbilt University, Nashville, TN
Robert F Labadie, M.D., Ph.D., FACSAssociate Professor, Dept. of Otolaryngology, Vanderbilt University Medical Center, Nashville, TN
INTRODUCTIONTaylor [1] has proposed that surgical robots be classified as either (a) surgical-assist devices,which modulate a surgeon’s motions, or (b) autonomous robots (which he calls “SurgicalCAD/CAM” systems to illustrate the analogy to industrial computer-aided design andmanufacturing), which are programmed to replace a portion of the surgical task. Perhaps themost widely known example of a surgical-assist system is the da Vinci® Surgical System(Intuitive Surgical Inc., Sunnyvale, CA, USA), which mimics and modifies the surgeon’smotions. These modifications can include elimination of tremor and scaling of motions suchthat large motions by the surgeon can be duplicated in a much smaller surgical field. Thissystem has been most heavily used in urologic surgery [2]. Within the field ofotolaryngology, it has been implemented for tongue-based resections to avoid splitting themandible for access [3].
Of autonomous robots, the ROBODOC® System (Integrated Surgical Systems, Davis, CA,USA) is the most widely used and referenced. This system was designed to bore a receivinglumen for orthopedic reconstructive joint surgery and has been used in more than 20,000cases. In practice, the device is rigidly affixed to the long bone for the procedure. While it
Corresponding Author Details: Ramya Balachandran, Ph.D., Research Assistant Professor, Department of Otolaryngology-Head andNeck Surgery, Vanderbilt University Medical Center, 1215 21st Avenue South, 10450 Medical Center, East South Tower, Nashville,TN 37232, [email protected], Phone: 615-322-5550, Fax: 615-936-5515.
NIH Public AccessAuthor ManuscriptOtol Neurotol. Author manuscript; available in PMC 2012 January 1.
Published in final edited form as:Otol Neurotol. 2011 January ; 32(1): 11–16. doi:10.1097/MAO.0b013e3181fcee9e.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

was shown that this system can accomplish the task better than a human operator, a class-action law suit was brought in Europe claiming that the wider surgical exposure necessaryfor the rigid linkage of the robot to the patient led to various complications including muscleand nerve damage, bone dislocation, and chronic pain. Because of these legal troubles, thecompany ceased operations in 2005 and was acquired by Curexo Medical Technologies(Freemont, CA), who received FDA approval for the ROBODOC® in 2008. The clinicalstatus of the ROBODOC® is in question at the time of this writing.
Because surgical-assist devices are controlled directly by human manipulation, regulatoryapproval is more straightforward, and they have been first to achieve widespread clinicaladoption. Since autonomous robots are not widely commercially available for surgicalapplications, few surgeons have any experience with them whatsoever. The surgical-assistdevice has the advantage of continuous human control, but the disadvantage that it cannotfunction appropriately unless the controlling human maintains continuous visual access bothto the anatomy being resected and to those critical structures in the vicinity of the resectionthat are to be spared. The autonomous robot by contrast (which is also usually subject tocontinuous monitoring by the surgeon), relies on the human operator only as a backup whileit follows the path prescribed by pre-operative planning. That planning, which can beperformed in the surgeon’s office before the patient is brought to the operating room, isbased on three-dimensional tomographic images, and as a result, the autonomous robot canresect tissue that remains invisible to the human controller, whose role is primarily to stopthe process if a technical problem develops.
This scenario, in which preplanning determines the path followed by an autonomous robot,is well-suited for procedures involving rigid tissues such as bone. It is much morechallenging to implement any degree of autonomy in robotic procedures involving softtissues because of their deformation between imaging and intervention, but strategies fordoing so are the topic of active research in the engineering community. As these resultsmature and are brought to clinical use, it is likely that we will see a blurring of the linebetween surgical-assist devices and autonomous robots, as limited autonomy is introducedto the former, while increasing levels of human control are incorporated into the latter.Regardless of the type or classification of robot used, the intent of incorporating robotictechnology into a surgical procedure is to produce a better outcome, which can take the formof many metrics including decreased operative time, improved accuracy, smaller incision,decreased recovery time, or overall decreased cost.
In the field of otology, a core component of otological cases is the mastoidectomy, in whichbone is milled away exposing but not damaging vital anatomy. Mastoidectomy lends itselfto an autonomous robotic approach for two reasons: (a) the tissue to be resected is encasedin rigid bone, and (b) critical anatomical features remain hidden until they are revealed byablation. The first of these two reasons makes surgery with the autonomous robot feasible;the second makes it useful. The rigidity of bone is essential because it ensures that the three-dimensional structure of the target anatomy is the same during pre-operative imaging andplanning as it is during subsequent intervention. The presence of critical hidden anatomy(nerves and other structures that must be spared but are embedded in the bone), exploits theutility of the autonomous robot, because three-dimensional imaging pinpoints the positionsof subsurface structures whose general locations can only be estimated during incremental,manual human intervention. As a result, the robot, guided by images that see beneath thesurface, can safely ablate bone to which the human operator would be blind.
Once we have chosen a surgical situation, like the mastoidectomy, in which rigid bonecomprises the target and critical anatomy is hidden from view, the central issue inautonomous robotics becomes the accurate determination of the single point in the three-
Danilchenko et al. Page 2
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

dimensional pre-operative image that corresponds to a point in the surgical field, and viceversa. This determination of corresponding points in two spaces is termed “registration”, andthe success of the robotic approach hinges on the accuracy of registration from the space ofthe pre-operative tomographic image to the space of the intra-operative patient. Thisproblem is not new. It has, for example, been faced for decades by stereotactic surgeons andothers who have provided geometrical guidance intra-operatively based on pre-operativeimages [4]. To achieve it, an autonomous robot must register these two spaces either throughrigid fixation, as is done by the stereotactic frame and by ROBODOC®, or via optical ormagnetic tracking, such as that achieved with image-guided surgical (IGS) systems via thealignment of skin surfaces or fiducial markers.
In this paper, we describe the use of an autonomous robot to perform a mastoidectomy usinginfrared tracking to monitor the motion of both the specimen and the robot. The method isapplied to cadaveric temporal bone specimens. To accomplish this task, fiducial markerswere implanted in the specimens, which were subsequently CT scanned. A surgeonidentified the boundaries of the mastoid on the CT scan, and the robot was then programmedto mill out the mastoid according to those boundaries. With both the robot and the specimenbeing tracked, any movement of the specimen during ablation was continuouslycompensated for by corrective motions of the robot. While the robot is subject to humancontrol via a manual emergency stop button, it otherwise operates completely autonomously.To the best of our knowledge, this is first report of an autonomous robot performing amastoidectomy.
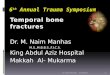
MATERIALS AND METHODSOur goal is to successfully develop an autonomous robot system that can mill the regionsidentified by the surgeon in a CT scan. To achieve this goal, we developed the OTOBOT™
system (Figure 1), which incorporates an industrial robot, the Mitsubishi RV-3S (MitsubishiElectric & Electronics USA, Inc., Cyprus, CA), controlled by custom software written inMatlab® and Simulink (The MathWorks Inc., Natick, MA) with real-time feedback of therobot’s movement provided via a Polaris Spectra® optical tracking system (NDI, Waterloo,ON, Canada) [5]. Figure 1 shows the experimental setup of the system. We custom-built theend effector of the robot to hold a surgical drill. To enable continuous, accurate tracking ofboth the patient (a temporal bone specimen in the current study) and the robot, three separatecoordinate reference frames each of which comprises four reflective spherical markers areattached rigidly to the robot’s end effector, to the robot base, and to the patient. Thisarrangement enables real-time tracking of the robot movement, and hence the drill tiplocation, relative to the patient, whether or not the patient moves. That tracking is performedby the NDI Polaris, which is not shown but which faces the robot from approximately theposition of the camera that acquired the picture shown in Figure 1—about 1-1/2 metersaway.
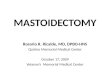
While the three coordinate reference frames provide the means to determine theinstantaneous positions and poses of the robot and patient relative to the physical space inwhich the actual milling will take place, they provide no means to register that physicalspace to CT image space, in which the boundaries of the regions to be milled are specified.For that purpose, we employ bone-implanted fiducial markers. This choice was madebecause bone-implanted markers are the most accurate available option, consistentlyenabling accuracies of 1.5 millimeters or better [6]. Three markers are screwed into bone inan arrangement surrounding the mastoid region, as shown in Figure 2. These markers, whichare made of titanium, show up clearly in a CT scan and can be localized using imageprocessing techniques. Their locations can also be acquired in physical space via a calibratedprobe that is tracked by the NDI Polaris system.
Danilchenko et al. Page 3
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

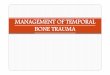
Prior to the start of the milling procedure, three fiducial markers are bone-implanted into thetemporal bone specimen, and a clinically-applicable temporal bone CT scan is subsequentlyacquired. The boundaries of the desired region to be milled are contoured on this same CTscan by the surgeon using custom segmentation software (Figure 3). The surgeon outlinesthe boundaries on axial slices of the image while simultaneously viewing intersectingcoronal and sagittal slices. The boundaries are chosen to encompass the region to be ablatedwhile maintaining a safe distance from the critical structures to be spared, including thefacial nerve, the tegmen, the sigmoid sinus, the external auditory canal, and the labyrinth. Atthe conclusion of the contouring phase, a three-dimensional rendering of the region that is tobe milled is displayed. At this point the surgeon can make modifications to the contours ifrequired. When the surgeon is satisfied with the segmentation, the region is transformed intoa set of points that determine the trajectory of the drill tip to be executed by the robot. Thefiducial markers are also localized in the CT image (may be done before or aftersegmentation is done). A coordinate reference frame is then rigidly attached to the specimen,and the locations of the fiducial markers are acquired in physical space using the calibratedprobe. The CT image and physical space are registered by applying point-based rigid-bodyregistration [7] to the two sets of fiducial points—one in each space. Using the registrationthus found, the trajectory points for the robot are transformed from the CT space to physicalspace, and the transformed points are given as input to the software that controls robotmovement.
The specimen with the coordinate reference frame is then placed within the workspace ofthe robot. Care is taken to make sure that the markers in all three coordinate referenceframes are within the field of view of the optical tracking system. The milling is theninitiated by starting the robot-control software application. The movements of the robot andpatient are continuously tracked, and the control software compensates for any movement ofthe patient during milling. A manual emergency stop button is available for the robot if therobot moves in an undesired fashion. A continuous computer screen update is providedshowing the progress of the milling as percentage of the total points covered.
Robotic mastoidectomy was performed on three temporal bone specimens using theprocedure described above. A 5 mm diameter surgical drill tip was used for the milling, andthe drill was powered to run at 80,000 rpm throughout the milling. We included a 1 mmsafety region during milling to compensate for possible small penetrations of the drill tipbeyond the region of interest (arising from small inaccuracies in registration, real-timetracking, or robot control). For this initial study, the robot was set to move at the constantspeed of 1 millimeter per second (mm/s) during milling. We observed no undesiredmovement of the robot during milling, and hence we did not use the emergency stop buttonat any time.
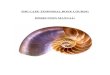
RESULTSFigure 4 shows the results of the milling of a temporal bone specimen. All three milledtemporal bone specimens were CT scanned after the procedure for the purpose of analyzingthe results of the milling. On analysis of the scan, no damage to any critical structure wasidentified. To determine whether the targeted bone was in fact removed, the pre-operativeand post-operative CT scans of each bone were registered using the three fiducial markers,and the originally delineated region was superposed from the pre-operative CT scan onto thepost-operative CT scan. For the three bones, we calculated the percentage of each targetedvolume that was removed. For the three bones, these percentages were 97.70%, 99.99%, and96.05%. Maximum error was identified as 0.6 mm.
Danilchenko et al. Page 4
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

DISCUSSIONHerein, we have described a first step along what will likely be a lengthy road towardsclinical testing and implementation of mastoidectomy via an autonomous robot. This firststep involved the modification of an industrial robot to perform complex milling on acadaveric specimen under infrared tracking of both robot and specimen. In our testing onthree specimens, we found that the surgeon’s pre-operative plan was successfully executedby the robot with at least 96% of the targeted bone removed without damage to criticalstructures. Excitement at this success is tempered, however, by the realization that a greatdeal of work remains before this concept can be tested in the operating room. While thefundamental engineering concepts behind the robotic technique are well developed, less wellstudied is the translation of such concepts to clinical applications. Issues such asmaintenance of sterility, logistics regarding transportation and set-up of the robot, andredundant safety constraints will need to be incorporated, as have been done with both theda Vinci® and ROBODOC® systems, both of which took decades to go from bench top toclinical use.
We acknowledge limitations of the proposed system, most notably the lack of soft-tissuework, which comprises at least a substantial portion of any ear surgery. Working withexisting technology, we designed our system to aid the surgeon by automating the mostpredictable component of the surgery, mastoid milling, based on CT scan of the specimen.The potential advantages of this approach include (a) reliability and positional accuracy ofthe robot, (b) “X-ray vision” afforded by the registration of the pre-operative CT to theintraoperative patient, and (c) possible economic benefits (e.g. reduced time of intervention,improved productivity, or other, as yet to be identified, metrics).
Regarding (a), robots are highly reliable and accurate. The Mitsubishi RV-3S robot used inthis study has a repeatability of 0.02 mm. In addition to high accuracy, robots are highlyreliable in repetitive tasks, with error rates lower than humans, and no risk of performancedegradation due to fatigue [8]. In-short, properly-calibrated robots can perform specifiedtasks with high accuracy and efficiency. Regarding (b), coupling IGS with an autonomousrobot leads to “X-ray vision” which allows such systems to see subsurface features beforethey may be injured. In the bone component of mastoid surgery, this “X-ray vision” offers apotentially large benefit in that the robot could be used to perform a highly accurate three-dimensional mastoidectomy—leaving a 1–2 mm margin of safety over vital anatomy—freeing the human operator to perform the more high-level fine dissection where humanjudgment is paramount.
Despite benefits (a) and (b), we recognize that catastrophic failure is a possibility as, forexample, if the registration between the CT and the target tissue was performed incorrectly,thereby placing the robot at the wrong starting point. Given the consequences of suchdamage, we believe that—particularly in initial cases—there is no substitute for continuousmonitoring by a trained surgeon. Put another way, the robot may be trusted to carry out thesurgeon’s plan only so long as a human is there to verify that it is doing what it was told. Assuch we envision, and are working on, human oversight systems such as having the surgeondepress the foot pedal to keep the robot moving and the drill spinning, a hand-held pausebutton, and the possibility of slow-motion control to reduce robot speed when in closeproximity to vital anatomy.
Regarding (c), there are many possible ways in which a robotic mastoidectomy may beeconomically beneficial. This may include reduced time of intervention. For this firstdemonstration of the technology over 90 minutes were required. This extended timeoccurred because (i) the robot was programmed to move at a very slow speed of 1 mm/sec
Danilchenko et al. Page 5
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

and (ii) a primitive path planning strategy where the robot often “backtracked” through areaspreviously drilled to reach the next coordinate to be ablated, leading to wasted robot motion.Future work will involve the automatic planning of optimal or near-optimal drill pathsthrough the surgeon-specified volume using generalizations of existing two dimensionalplanning algorithms such as in [9]. Regarding (i), the 1 mm/sec was chosen as an initialspeed based on our desire to carefully monitor the progress of the robot. We are confidentthat we can increase this speed to 5 mm/sec, as has been reported in the milling of cranialbone by others [10]. This increase in speed alone would reduce the 90 minute intervention to18 minutes.
Furthermore, regarding (ii), we feel that we can optimize path planning, eliminating about50% of redundant movements, which were a consequence of our primitive planningstrategy. This improvement would further reduce the time of intervention to approximately 9minutes. From other clinical studies in which we are involved, we know that it takesapproximately 10–12 minutes to place fiducial markers, acquire the CT scan, and set upcomparable technology. Thus, we feel it reasonable that the bone excavation of amastoidectomy using a robot could be performed routinely in approximately 20 minutes.While this is not dramatically quicker than a highly experienced otologic surgeon, it mayfind utility in freeing the surgeon to concentrate on the more high-level dissection in closeproximity to vital anatomy.
Future economic assessments will be necessary to justify clinical use of such a system, ashas been underway for the da Vinci® system, which retails for $1.4 million. Use of the daVinci® robot for prostatectomy adds over $2,500 to the cost of each surgical intervention[11]. To date, the offsetting benefits include decreased recovery time and decreasedcomplications [12]. Because our system is far from routine clinical use, we can report, interms of economics, only the cost of the system, which is approximately $40,000 (robot$19,900, infrared tracking system $15,000, and control computer $5,000). Estimating thecost of development and experimentation required to obtain FDA approval andcommercialize the robot, we feel the machine may retail for $500,000. As wear on the robot,whose movements are far smaller and slower than those required for routine industrialapplications, will allow it to be used on thousands of cases with minimal maintenance, wepredict its cost per procedure will be below $100. Other costs accruing from this technologywill be associated with markers and drapes, which per case should be below $100.
Noting that the typical outcomes associated with mastoid surgery (e.g. post operativehearing, success of tympanic membrane grafting, recurrence of disease, acquisition ofspeech after cochlear implant) are independent of whether the drill is held by a human or arobot, the major potential benefit offered by this technology may be reduced operative time.However, until the robot can completely replace the surgeon, its benefit will be bound by theneed for the surgeon or an assistant to monitor the procedure thus tying up operating roomtime. At this point, we predict that the savings from reduced operating room time can beexpected to more than offset the additional costs (predicted above to be $200 or less)associated with this technology. There may be other benefits that we are as yet unaware of(e.g. fewer drill bits per case, fewer complications) that may make the economic argumentfor this technology more compelling.
Before such a clinical system is deployed, many intermediate steps need to be taken. Ournear-term future work will be focused on improving the efficiency of the path plan so thatthe milling time can be reduced. Medium-term future work will include redundant safetychecks including monitoring force feedback at the point where the robot grips the drill,potentiometers on robot joints (in addition to the optical encoders used in industrial robots),improvements to the user interface for the surgeon, and the development of techniques for
Danilchenko et al. Page 6
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

bagging and sterilization of robot components. Only after these steps have beenaccomplished will our system be ready for clinical testing.
CONCLUSIONThe preliminary work we have presented here, given the relatively simple and controlledconditions of a cadaveric specimen in a laboratory, shows that an autonomous roboticsystem is capable both of determining a trajectory and of directing a drill along that sametrajectory so as to perform a prescribed mastoidectomy with 96% removal of desired bonevolume and with no damage to critical structures. There is much to do, however, before sucha system can be considered for clinical use. The major issue is to establish a level of patientsafety that is at least at the level of current clinical practice. This safety level will requirethat a surgeon remain in charge of the procedure including sitting at the surgical bed,monitoring the robot’s progress, and stopping the system if a problem develops. This workis only a start, but it provides encouragement that, with a plan based on pre-operativetomographic images that give information about what is below the bone surface, an accurateregistration to transfer that information to the patient in the operating room, and an obedientrobot continuously monitored by the surgeon, robotic mastoidectomy is technologicallyfeasible.
AcknowledgmentsThe project described was supported by Award Number R21EB006044-01A1 from the National Institute ofBiomedical Imaging and Bioengineering. The content is solely the responsibility of the authors and does notnecessarily represent the official views of the National Institute of Biomedical Imaging and Bioengineering or theNational Institutes of Health.
References1. Taylor R. A perspective on medical robotics. Proc IEEE. September; 2006 94(9):1652–1664.2. Guru KA, Hussain A, Chandrasekhar R, Piacente P, Bienko M, Glasgow M, Underwood W,
Wilding G, Mohler JL, Menon M, Peabody JO. Current status of robot-assisted surgery in urology:a multi-national survey of 297 urologic surgeons. Can J Urol. 2009; 16(4):4736–41. [PubMed:19671225]
3. Hockstein NG, Nolan JP, O’Malley BW Jr, Woo YJ. Robot-assisted pharyngeal and laryngealmicrosurgery: results of robotic cadaver dissections. Laryngoscope. 2005; 115(6):1003–8.[PubMed: 15933510]
4. Fitzpatrick JM. The role of registration in accurate surgical guidance. Journal of Engineering inMedicine. May; 2010 224(5):607–22. [PubMed: 20718266]
5. Baron, H Eilers; Munske, B.; Toennies, JL.; Balachandran, R.; Labadie, RF.; Ortmaier, T.; Webster,RJ, III. Journal of Engineering in Medicine. Vol. 224. Percutaneous Inner-Ear Access Via anImage-Guided Industrial Robot System. Need pages (May 2010)
6. Maurer CR Jr, Fitzpatrick JM, Wang MY, Galloway RL Jr, Maciunas RJ, Allen GS. Registration ofhead volume images using implantable fiducial markers. IEEE Transactions on Medical Imaging.Aug.1997 16:447–462. [PubMed: 9263002]
7. Fitzpatrick, JM.; Hill, DLG.; Maurer, CR. “Registration”. Medical Image Processing. In: Sonka, M.;Fitzpatrick, JM., editors. Volume II of the Handbook of Medical Imaging. SPIE Press; 2000. p.447-513.
8. Paul, Richard P.; Nof, Shimon Y. Work methods measurement--a comparison between robot andhuman task performance. International Journal of Production Research. May79.17(3):277. 27p, 3Diagrams, 20 Charts; (AN 5550948).
9. Gabriely, Yoav; Rimon, Elon. Spanning-tree based coverage of continuous areas by a mobile robot.Annals of Mathematics and Artificial Intelligence. 2001; 31:77–98.
Danilchenko et al. Page 7
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

10. Engelhardt, M.; Bast, P.; Lauer, W.; Rohde, V.; Schmieder, K.; Radermacher, K. Manual vs.robotic milling parameters for development of a new robotic system in cranial surgery.International Congress Series; 2004. p. 533-538.
11. Lotan Y, Cadeddu JA, Gettman MT. The new economics of radical prostatectomy: costcomparison of open, laparoscopic, and robot assisted techniques. J Urology. 2004; 172(4):1431–1435.
12. Menon M. Robotic radical retropubic prostatectomy. BJU Int. 2003; 91(3):175–180. [PubMed:12580996]
Danilchenko et al. Page 8
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

Figure 1.OTOBOT™ robotic system set up to perform mastoidectomy on patient (temporal bonespecimen in this current study). The robotic system consists of a Mitsubishi RV-3Sindustrial robot controlled by custom software. Coordinate reference frames with markersare attached rigidly to the robot end effector, robot base, and patient to allow tracking of themovements of the robot, drill, and patient during milling. An NDI Polaris optical trackingsystem (not shown here) is used to track the markers.
Danilchenko et al. Page 9
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

Figure 2.Temporal bone specimen with coordinate reference frame attached. Bone-implanted fiducialmarkers are used for registration of image and physical space.
Danilchenko et al. Page 10
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

Figure 3.Screenshot of the software used for the segmentation. The surgeon contours the region todrill in the axial view of the image (bottom left). A three-dimensional shape of the regionchosen for milling is displayed to the surgeon at the end of the segmentation.
Danilchenko et al. Page 11
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript

Figure 4.(a) Temporal bone specimen after completion of robot milling. (b) Close-up of the milledregion. All three fiducials are visible in (a); one is visible in (b).
Danilchenko et al. Page 12
Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript
NIH
-PA Author Manuscript