Embed Size (px)
Citation preview

Network design with equilibrium-driven customer demands
Mahdi Hamzeei and James LuedtkeUniversity of Wisconsin-Madison
N1
M2
M1
N4
M3
N3
Given:
N: set of customers
M: set of facilities
Demand of customer i 2 N
Capacity of facility j 2 M
Cost of travel from i to j
Cost of opening facility j
The system operator wishes to open a subset of facilitiesto open to balance customer service with cost of openingthe facilities.
Given a subset of open facilities, customers choose towhich facilities to send their demand.
Each facility faces congestion which depends on theamount of demand sent to the facility.
Customers choose facilities that minimize travel andcongestion cost of the facility.
Key challengeThe allocation of demands of customers to facilities is thesolution of an equilibrium constraint.
Hamzeei and Luedtke University of Wisconsin-Madison 1/2

Proposed approachFormulated as a mixed-integer bilevel programProposed a solution method:
1 Derived a Lagrangian relaxation2 Lagrangian dual problem can be decomposed into
subproblems, one for each facility3 Subproblems can be solved efficiently.4 Solution of the relaxation is used to obtain a feasible solution
to the original problem
Gap between lower and upper bound indicates the strength ofthe solution
Hamzeei and Luedtke University of Wisconsin-Madison 2/2

1HZ�0,3�DSSURDFKHV�WR�WKH�IORRU�OD\RXW�SUREOHP
-RH\�+XFKHWWH��-XDQ�3DEOR�9LHOPD��6DQWDQX�'H\

Ɣ )XQGDPHQWDO�SUREOHP�LQ�9/6,«���WKDW�ZH�FDQ¶W�VROYH�DW�LQGXVWU\�VFDOH�ZLWK�0,3
Ɣ &HQWUDO�LGHD��VXESUREOHPV�KDYH�VDPH�VWUXFWXUH�� )RUPXODWLRQV
D� *HW�VWURQJ�IRUPXODWLRQV�IRU�VXESUREOHPE� &RPELQH�IRU�IRUPXODWLRQ�IRU�PDVWHU�SUREOHP
�� /RZHU�ERXQGVD� 6ROYH�VXESUREOHPV�WR�RSWLPDOLW\��³0,3LQJ´�E� *HQHUDWH�ORZHU�ERXQGV�IRU�PDVWHU�SUREOHP

Computational investigation of generalized intersection cuts
Aleksandr M. Kazachkov!Tepper School of Business, Carnegie Mellon University
Based on joint work with Egon Balas, François Margot, and Selvaprabu Nadarajah









How to choose hyperplanes?

Best strategy for generating cuts?

DECOMPOSITION ALGORITHMS FOR TWO-STAGECHANCE-CONSTRAINED PROGRAMS
Xiao Liu, Simge Kucukyavuz and James Luedtke
When we are making decisions about uncertain future:
Can we combine these two models?
I Two-stage CCMP : consider costs of recourse actions for feasiblescenarios.
I Two-stage CCMP with Recovery (CCMPR) : model the needs to“recover” from a infeasible scenario.
1 / 2

Solution algorithm
What has been done:
However, a simple combination of these two approaches does not yield goodresults for 2-stage CCMPR.
What we do:
I Derive a class of strong valid optimality cuts.I Propose a Benders-type decomposition algorithm.
2 / 2
Open-source algebraic modeling in Julia
Miles LubinMIT Operations Research Center
MIP 2014
1 / 3
State of the art: AMPL, GAMS, Pyomo, CPLEX Concert, CVX,YALMIP, PuLP, GurobiPy, Gurobi C++, CMPL, AIMMS, ZIMPL,...
In MIP research we want:
I Ease of use (Python/MATLAB over C/C++)
I Access to low-level solver (callbacks)
I Performance
I (Solver independence)
Can we have it all?
2 / 3
A new modeling language for optimization
I Embedded in Julia, a high-performance high-level language fortechnical computing
I Familiar syntax for users of Python/MATLAB/AMPL
I As fast as hand-written sparse matrix generatorsI Solver-independent B&B callbacks for implementing cutting
planes (and more)I Gurobi, CPLEX, GLPK
I Derivatives and expression trees for MINLP (without AMPL)
I Open source, easy to extend
3 / 3

A machine learning based approximation of
strong branching
in the 2014 Mixed Integer Programming Workshop (MIP 2014)
Alejandro Marcos Alvarez Quentin Louveaux Louis Wehenkel
University of Liege
July 21, 2014
1

Motivation
Strong branching generally
minimizes the number of nodes of the tree
is intractable in practice
Idea ! approximate strong branching with a more tractable function
This is not new !
Innovation of our approach: we use machine learning techniques
2

What you will see on our poster
1
discover what machine learning is
2
how machine learning can be used to construct a branching
heuristic
3
discover a set of features describing fractional variables (main
part of the work)
3

The$Power$of$a$Negative$Eigenvalue:$Aggregation$Cuts$for$Nonlinear$Integer$
Programming$!
Sina$Modaresi$MIT/University.of.Pittsburgh.
!
Joint.Work.with.Juan.Pablo.Vielma.(Massachusetts.Institute.of.Technology).
!
Mixed.Integer.Programming.Workshop,.Columbus,.July.2014.

• “Extended”.Aggregation.Technique.(Yildiran,.2009).
• Characterizing.convex.hull.of.a.set.defined.by.two.quadratic.inequalities.
!
•No.specific.requirement.on.the.two.quadratics.
• Convex.hull.characterization.is.independent.of.the.geometry.of.the.set
AggregaTon.Cuts.for.MINLP
Monday,.July.21,.2014.............The.Power.of.a.NegaTve.Eigenvalue:.AggregaTon.Cuts.for.Nonlinear.Integer.Programming. ..............................
S :=�x 2 Rn : xT
Qix+ 2bTi x+ �i < 0, i = 1, 2

•
AggregaTon.Cuts.for.MINLP
Monday,.July.21,.2014.............The.Power.of.a.NegaTve.Eigenvalue:.AggregaTon.Cuts.for.Nonlinear.Integer.Programming. ..............................
The Power of a Negative Eigenvalue: Aggregation Cuts for
Nonlinear Integer Programming
Sina Modaresi
⇤Juan Pablo Vielma
†
July 20, 2014
S := {x 2 Rn: qi < 0, i = 1, 2} ,
where
qi = x
TQix+ 2b
Ti x+ �i i = 1, 2.
Example. Let
S :=
�
(x, t) 2 R2: x
2 � t
2+ 2x+ 2 0, �x
2+ t
2+ 2x� 2 0
.
q =
x
1
�T
P
x
1
�
, (1)
where x 2 Rn, P =
Q b
b
T�
�
2 Sn+1, Q 2 Sn
, b 2 Rn, and � 2 R. The above quadratic
function can also be expressed as
q = x
TQx+ 2b
Tx+ �.
They study the set S defined by two quadratic inequalities as
S := {x 2 Rn: qi < 0, i = 1, 2} .
Denote the quadratic inequality induced by the convex combination of the above quadratic
inequalities as
q� := (1� �)q1 + �q2,
where � 2 [0, 1]. Similarly, define
P� := (1� �)P1 + �P2 and Q� := (1� �)Q1 + �Q2.
Also define the associated quadratic set as
S� := {x 2 Rn: q� < 0} .
⇤Industrial Engineering Department, University of Pittburgh, Pittsburgh PA 15261, [email protected]
†Sloan School of Management, Massachusetts Institute of Technology, Cambridge MA 02139, [email protected]
1

•Characterizing.convex.hull.of.a.set.defined.by.a.conic.and.a.quadratic.inequality.
!
!
.......using.the.same.aggregation.technique.
!
AggregaTon.Cuts.for.MINLP
Monday,.July.21,.2014.............The.Power.of.a.NegaTve.Eigenvalue:.AggregaTon.Cuts.for.Nonlinear.Integer.Programming. ..............................
The Power of a Negative Eigenvalue: Aggregation Cuts for
Nonlinear Integer Programming
Sina Modaresi
⇤Juan Pablo Vielma
†
July 20, 2014
S := {x 2 Rn: kAx� ck2 < a
Tx� d
x
TQx+ 2b
Tx+ � < 0},
S := {x 2 Rn: qi < 0, i = 1, 2} ,
where
qi = x
TQix+ 2b
Ti x+ �i i = 1, 2.
Example. Let
S :=
�
(x, t) 2 R2: x
2 � t
2+ 2x+ 2 0, �x
2+ t
2+ 2x� 2 0
.
q =
x
1
�T
P
x
1
�
, (1)
where x 2 Rn, P =
Q b
b
T�
�
2 Sn+1, Q 2 Sn
, b 2 Rn, and � 2 R. The above quadratic
function can also be expressed as
q = x
TQx+ 2b
Tx+ �.
They study the set S defined by two quadratic inequalities as
S := {x 2 Rn: qi < 0, i = 1, 2} .
Denote the quadratic inequality induced by the convex combination of the above quadratic
inequalities as
q� := (1� �)q1 + �q2,
where � 2 [0, 1]. Similarly, define
P� := (1� �)P1 + �P2 and Q� := (1� �)Q1 + �Q2.
⇤Industrial Engineering Department, University of Pittburgh, Pittsburgh PA 15261, [email protected]
†Sloan School of Management, Massachusetts Institute of Technology, Cambridge MA 02139, [email protected]
1

On Blocking and Anti-Blocking Polyhedra in Infinite Dimensions
Luis Rademacher Alejandro Toriello Juan Pablo Vielma

Motivating Question • For infinite horizon planning:
Infinite objective function can be avoided by using either – a discount 𝛼 ∈ 0,1
𝛼 𝑐 𝑥
– a cumulative average
lim sup
→
1𝑛 𝑐 𝑥
• Drawbacks: distant future or near future have low influence,
respectively.

Our results
• Use complementary slackness as a notion of optimality with (possibly) infinite objective value: For packing-covering problems (blocking anti-blocking polyhedra): – existence of optimal primal-dual pairs – equivalent to time-localized optimality – integrality of extreme points for natural problems.

MILP model for a real-world hydro-powerunit-commitment problem
Pascale Bendotti1, Claudia D’Ambrosio2, Grace Doukopoulos1,Arnaud Lenoir1, Leo Liberti2 Youcef Sahraoui1,2
1OSIRIS, EDF R&D
2LIX, Ecole Polytechnique
MIP workshop - Ohio State UniversityJuly 21st, 2014
(EDF R&D, Ecole Polytechnique) Short-term hydro scheduling 05/06/2014 1 / 3

Challenge
Solve a large-scale MILP with real-world data.J
Goalsconvergence to optimalitylimited resolution time-framemore refined model to fit real description of operationsN
Obstaclesinfeasibilitiesnumerical difficultieslong resolution times and intractabilities
=) idenfify and cope with obstacles
(EDF R&D, Ecole Polytechnique) Short-term hydro scheduling 05/06/2014 2 / 3

Approach, 1st results and future work
1 Approach:Simplify model by using notably less binary variables to get firstunderstanding
2 Results for infeasibilities (with Cplex conflict refiner):discard (or modify) datarelax or penalize constraints (or consider as 2nd objective)
3 Future work:dealing with numerical instabilitiesunderstanding poor resolution performancesolving the real problem: bi-objective, decomposition
(EDF R&D, Ecole Polytechnique) Short-term hydro scheduling 05/06/2014 3 / 3

• Master Knapsack Problem K(n) is the integer solutions to
t1+ 2 t2 + … + n tn = n, “the knapsack equation”
!• Knapsack facets ξt ≤ 1 (assume ξ1 = 0.)
!• A knapsack facet is a 1/k-facet if coefficients
ξi ϵ { 0/k, 1/k, …, k/k } U { ½ } for all i = 1, …, n.
A Few Strong Knapsack Facets - Shim, Cao, Chopra, Steffy
1

• Subproblem = general integer knapsack problem
!• Every integer knapsack problem is a projection of K(n) ⇔ 5 t
5 + 6 t
6 + 4 t
4 ≤ 10
⇔ 5 t5 + 6 t
6 + 4 t
4 + t
1 = 10
⇔ 1 t1+ 2 t
2 + … + 10 t
10 = 10 and t
2 = t
3 = t
7 = t
8 = t
9 = t
10 = 0
!• A knapsack facet ξ.t ≤ 1 is projected into a valid inequality
ξ{4,5,6}t{4,5,6} ≤ 1
!• Assume l << n.
A Few Strong Knapsack Facets - Shim, Cao, Chopra, Steffy
2

• Separate > 75% of facets in O(l4 = lk/2) !
– Independent of n
!
–Small k are good enough
A Few Strong Knapsack Facets - Shim, Cao, Chopra, Steffy
3

Facets of the bound-relaxed
two-integer knapsack
Ricardo Fukasawa, Laurent Poirrier,
´
Alinson Xavier
Department of Combinatorics and Optimization
University of Waterloo, Canada
July 2014
1 / 3

Introduction and Two-row model
⇧ We study the facial structure of the polyhedron
P = conv
((x , s) 2 Z⇥ Rn
+ : x = f +
nX
i=1
r
i
s
i
, s1 2 Z),
where n 2 Z+, f 2 Q \ Z and r 2 Qn
.
⇧ Two-integer knapsack, non-negativity of an integer variable is relaxed.
⇧ Single-row corner relaxation, integrality of a non-basic variable is kept.
⇧ Can provide cutting planes for general mixed-integer problems.
⇧ Let S = Z⇥ Z+. We can rewrite
P =
((x , s) 2 S ⇥ Rn
+ :
�x1
x2
�=
�f
0
�+
�r1
1
�s1 +
nX
i=2
�r
i
0
�s
i
).
⇧ Correspondence between S-free sets and valid inequalities for P .
2 / 3

Introduction and Two-row model
⇧ We study the facial structure of the polyhedron
P = conv
((x , s) 2 Z⇥ Rn
+ : x = f +
nX
i=1
r
i
s
i
, s1 2 Z),
where n 2 Z+, f 2 Q \ Z and r 2 Qn
.
⇧ Two-integer knapsack, non-negativity of an integer variable is relaxed.
⇧ Single-row corner relaxation, integrality of a non-basic variable is kept.
⇧ Can provide cutting planes for general mixed-integer problems.
⇧ Let S = Z⇥ Z+. We can rewrite
P =
((x , s) 2 S ⇥ Rn
+ :
�x1
x2
�=
�f
0
�+
�r1
1
�s1 +
nX
i=2
�r
i
0
�s
i
).
⇧ Correspondence between S-free sets and valid inequalities for P .
2 / 3

Introduction and Two-row model
⇧ We study the facial structure of the polyhedron
P = conv
((x , s) 2 Z⇥ Rn
+ : x = f +
nX
i=1
r
i
s
i
, s1 2 Z),
where n 2 Z+, f 2 Q \ Z and r 2 Qn
.
⇧ Two-integer knapsack, non-negativity of an integer variable is relaxed.
⇧ Single-row corner relaxation, integrality of a non-basic variable is kept.
⇧ Can provide cutting planes for general mixed-integer problems.
⇧ Let S = Z⇥ Z+. We can rewrite
P =
((x , s) 2 S ⇥ Rn
+ :
�x1
x2
�=
�f
0
�+
�r1
1
�s1 +
nX
i=2
�r
i
0
�s
i
).
⇧ Correspondence between S-free sets and valid inequalities for P .
2 / 3

Introduction and Two-row model
⇧ We study the facial structure of the polyhedron
P = conv
((x , s) 2 Z⇥ Rn
+ : x = f +
nX
i=1
r
i
s
i
, s1 2 Z),
where n 2 Z+, f 2 Q \ Z and r 2 Qn
.
⇧ Two-integer knapsack, non-negativity of an integer variable is relaxed.
⇧ Single-row corner relaxation, integrality of a non-basic variable is kept.
⇧ Can provide cutting planes for general mixed-integer problems.
⇧ Let S = Z⇥ Z+. We can rewrite
P =
((x , s) 2 S ⇥ Rn
+ :
�x1
x2
�=
�f
0
�+
�r1
1
�s1 +
nX
i=2
�r
i
0
�s
i
).
⇧ Correspondence between S-free sets and valid inequalities for P .
2 / 3
Main Results
⇧ All facet-defining inequalities come from:
⇧ Maximal splits unbounded along the line
�f
0
�+ �
�r1
1
�
⇧ Maximal S-free wedges with apex on this same line.
⇧ At most one wedge for each facet of
A = conv{x 2 Z⇥ Z+ : x1 � r1x2 f }, orB = conv{x 2 Z⇥ Z+ : x1 � r1x2 � f }.
⇧ Algorithms to:
⇧ Enumerate the facets of A,B , therefore all facet-defining wedges.
⇧ Calculate trivial lifting coe�cients for additional integer variables.
⇧ Wedge cuts generalize MIR and 2-step MIR cuts.
⇧ Upper bound on the split rank.
⇧ Computational experiments.
3 / 3

Main Results
⇧ All facet-defining inequalities come from:
⇧ Maximal splits unbounded along the line
�f
0
�+ �
�r1
1
�
⇧ Maximal S-free wedges with apex on this same line.
⇧ At most one wedge for each facet of
A = conv{x 2 Z⇥ Z+ : x1 � r1x2 f }, orB = conv{x 2 Z⇥ Z+ : x1 � r1x2 � f }.
⇧ Algorithms to:
⇧ Enumerate the facets of A,B , therefore all facet-defining wedges.
⇧ Calculate trivial lifting coe�cients for additional integer variables.
⇧ Wedge cuts generalize MIR and 2-step MIR cuts.
⇧ Upper bound on the split rank.
⇧ Computational experiments.
3 / 3

Main Results
⇧ All facet-defining inequalities come from:
⇧ Maximal splits unbounded along the line
�f
0
�+ �
�r1
1
�
⇧ Maximal S-free wedges with apex on this same line.
⇧ At most one wedge for each facet of
A = conv{x 2 Z⇥ Z+ : x1 � r1x2 f }, orB = conv{x 2 Z⇥ Z+ : x1 � r1x2 � f }.
⇧ Algorithms to:
⇧ Enumerate the facets of A,B , therefore all facet-defining wedges.
⇧ Calculate trivial lifting coe�cients for additional integer variables.
⇧ Wedge cuts generalize MIR and 2-step MIR cuts.
⇧ Upper bound on the split rank.
⇧ Computational experiments.
3 / 3

Main Results
⇧ All facet-defining inequalities come from:
⇧ Maximal splits unbounded along the line
�f
0
�+ �
�r1
1
�
⇧ Maximal S-free wedges with apex on this same line.
⇧ At most one wedge for each facet of
A = conv{x 2 Z⇥ Z+ : x1 � r1x2 f }, orB = conv{x 2 Z⇥ Z+ : x1 � r1x2 � f }.
⇧ Algorithms to:
⇧ Enumerate the facets of A,B , therefore all facet-defining wedges.
⇧ Calculate trivial lifting coe�cients for additional integer variables.
⇧ Wedge cuts generalize MIR and 2-step MIR cuts.
⇧ Upper bound on the split rank.
⇧ Computational experiments.
3 / 3

Main Results
⇧ All facet-defining inequalities come from:
⇧ Maximal splits unbounded along the line
�f
0
�+ �
�r1
1
�
⇧ Maximal S-free wedges with apex on this same line.
⇧ At most one wedge for each facet of
A = conv{x 2 Z⇥ Z+ : x1 � r1x2 f }, orB = conv{x 2 Z⇥ Z+ : x1 � r1x2 � f }.
⇧ Algorithms to:
⇧ Enumerate the facets of A,B , therefore all facet-defining wedges.
⇧ Calculate trivial lifting coe�cients for additional integer variables.
⇧ Wedge cuts generalize MIR and 2-step MIR cuts.
⇧ Upper bound on the split rank.
⇧ Computational experiments.
3 / 3

Generating Multi-row Simplex Cuts on HigherDimensional Spaces
Emre Yamangil 1
1Rutgers University Center for Operations Research
July 21st, 2014
Joint work with Endre Boros
Emre Yamangil (RUTCOR) Multi-row simplex cuts July 21st, 2014 1 / 6

Outline
1 Corner polyhedron
2 Maximal lattice-free convex sets
3 Numerical experiment
Emre Yamangil (RUTCOR) Multi-row simplex cuts July 21st, 2014 2 / 6
Preliminaries
Corner Polyhedron
Let the corner polyhedron be represented as follows:
C = conv
(✓x
s
◆2 Zm ⇥ Rk : x = f +
kX
i=1
ri si , s � 0
)(1)
We want to generate a deepest cut in the sense that it minimizes the sum
of its coe�cients and separates a fractional vector f and C .
Intersection Cut
Let S ⇢ Rm be closed, convex and s.t. f 2 int(S) and8x 2 Zm ) x /2 int(S). Then,
Pkj=1�S(rj)sj � 1 is valid for (1) that cuts
o↵ basic solution f , where �S(rj) := inf{t > 0 : f + rj/t 2 S}, 8j .
Emre Yamangil (RUTCOR) Multi-row simplex cuts July 21st, 2014 3 / 6

Maximal lattice-free convex sets
Theorem (Bell and Scarf (1977))
Let {x 2 Zm : Ax b} = ; where A 2 R`⇥m, then there are 2m or less
inequalities among Ax b, say A
0x b
0, such that
{x 2 Zm : A0x b
0} = ;.
Theorem (Lovasz (1989))
If S is maximal-lattice free convex set on Rms.t. f 2 int(S), then
S = {x 2 Rm : A(x � f ) 1} for some A 2 R`⇥m, where ` 2m can be
assumed.
Emre Yamangil (RUTCOR) Multi-row simplex cuts July 21st, 2014 4 / 6
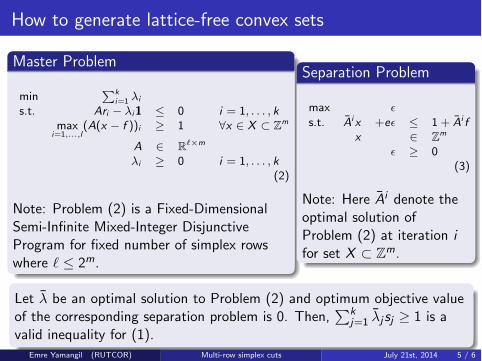
How to generate lattice-free convex sets
Master Problem
min
Pki=1 �i
s.t. Ari � �i1 0 i = 1, . . . , kmax
i=1,...,l(A(x � f ))i � 1 8x 2 X ⇢ Zm
A 2 R`⇥m
�i � 0 i = 1, . . . , k(2)
Note: Problem (2) is a Fixed-DimensionalSemi-Infinite Mixed-Integer DisjunctiveProgram for fixed number of simplex rowswhere ` 2m.
Separation Problem
max ✏s.t.
¯
A
ix +e✏ 1 +
¯
A
if
x 2 Zm
✏ � 0
(3)
Note: Here A
i denote theoptimal solution ofProblem (2) at iteration i
for set X ⇢ Zm.
Let � be an optimal solution to Problem (2) and optimum objective valueof the corresponding separation problem is 0. Then,
Pkj=1 �jsj � 1 is a
valid inequality for (1).
Emre Yamangil (RUTCOR) Multi-row simplex cuts July 21st, 2014 5 / 6
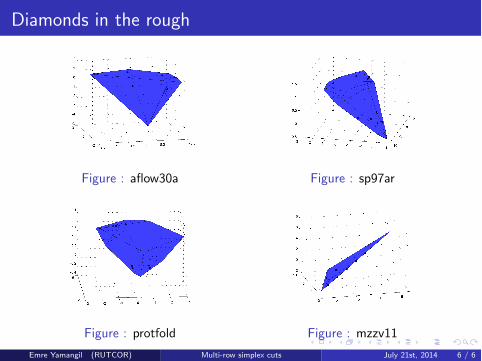
Diamonds in the rough
Figure : aflow30a
Figure : protfold
Figure : sp97ar
Figure : mzzv11
Emre Yamangil (RUTCOR) Multi-row simplex cuts July 21st, 2014 6 / 6
Two-Term Disjunctions on the Second-OrderCone
Sercan Yıldı[email protected]
joint work withFatma Kılınç-Karzan Gérard Cornuéjols
July 21, 2014

Mixed-integer conic set: S := {x 2K : Ax = b, x
j
2 Z 8j 2 J}.Two-term disjunctive relaxation: C
1
[C
2
where C
i
:= {x 2K : Ax = b, c
>i
x � c
i,0}.
Strong disjunctive cuts for S through a study of conv(C1
[C
2
)
S C
1
[C
2
conv(C1
[C
2
)
Main contribution: Explicit and simple description of conv(C1
[C
2
)when K is the second-order cone.
Sercan Yıldız Two-Term Disjunctions on the Second-Order Cone 1

Mixed-integer conic set: S := {x 2K : Ax = b, x
j
2 Z 8j 2 J}.Two-term disjunctive relaxation: C
1
[C
2
where C
i
:= {x 2K : Ax = b, c
>i
x � c
i,0}.
Strong disjunctive cuts for S through a study of conv(C1
[C
2
)
S C
1
[C
2
conv(C1
[C
2
)
Main contribution: Explicit and simple description of conv(C1
[C
2
)when K is the second-order cone.
Sercan Yıldız Two-Term Disjunctions on the Second-Order Cone 1

PART 1: C
1
[C
2
where C
i
= {x 2K : c
>i
x � c
i,0}.
We derive a family of convex valid inequalities that characterizeconv(C
1
[C
2
):
2c
2,0 � (bc
1
+ c
2
)>x r((bc
1
� c
2
)>x)2 +N (b )⇣
x
2
n
�kxk2
2
⌘.
We show that these inequalities admit an SOC expression under asuitable “disjointness" assumption:
N (b )x+2(c>2
x� c
2,0)
✓b c
1
� c
2
�bc
1,n + c
2,n
◆2K.
We identify cases where a single one of these inequalities issufficient to describe conv(C
1
[C
2
).
PART 2: C
1
[C
2
where C
i
= {x 2K : Ax = b, c
>i
x � c
i,0}.
We identify a set of conditions under which a single inequality ofthe type above is sufficient to describe conv(C
1
[C
2
).
In particular, we can characterize the convex hull of
all two-term disjunctions on ellipsoids and paraboloids,all split disjunctions on ellipsoids, paraboloids, andhyperboloids.
Sercan Yıldız Two-Term Disjunctions on the Second-Order Cone 2

PART 1: C
1
[C
2
where C
i
= {x 2K : c
>i
x � c
i,0}.
We derive a family of convex valid inequalities that characterizeconv(C
1
[C
2
):
2c
2,0 � (bc
1
+ c
2
)>x r((bc
1
� c
2
)>x)2 +N (b )⇣
x
2
n
�kxk2
2
⌘.
We show that these inequalities admit an SOC expression under asuitable “disjointness" assumption:
N (b )x+2(c>2
x� c
2,0)
✓b c
1
� c
2
�bc
1,n + c
2,n
◆2K.
We identify cases where a single one of these inequalities issufficient to describe conv(C
1
[C
2
).
PART 2: C
1
[C
2
where C
i
= {x 2K : Ax = b, c
>i
x � c
i,0}.
We identify a set of conditions under which a single inequality ofthe type above is sufficient to describe conv(C
1
[C
2
).
In particular, we can characterize the convex hull of
all two-term disjunctions on ellipsoids and paraboloids,all split disjunctions on ellipsoids, paraboloids, andhyperboloids.
Sercan Yıldız Two-Term Disjunctions on the Second-Order Cone 2

PART 1: C
1
[C
2
where C
i
= {x 2K : c
>i
x � c
i,0}.
We derive a family of convex valid inequalities that characterizeconv(C
1
[C
2
):
2c
2,0 � (bc
1
+ c
2
)>x r((bc
1
� c
2
)>x)2 +N (b )⇣
x
2
n
�kxk2
2
⌘.
We show that these inequalities admit an SOC expression under asuitable “disjointness" assumption:
N (b )x+2(c>2
x� c
2,0)
✓b c
1
� c
2
�bc
1,n + c
2,n
◆2K.
We identify cases where a single one of these inequalities issufficient to describe conv(C
1
[C
2
).
PART 2: C
1
[C
2
where C
i
= {x 2K : Ax = b, c
>i
x � c
i,0}.
We identify a set of conditions under which a single inequality ofthe type above is sufficient to describe conv(C
1
[C
2
).
In particular, we can characterize the convex hull of
all two-term disjunctions on ellipsoids and paraboloids,all split disjunctions on ellipsoids, paraboloids, andhyperboloids.
Sercan Yıldız Two-Term Disjunctions on the Second-Order Cone 2

Two-Term Disjunctions on the Second-OrderCone
Sercan Yıldı[email protected]
joint work withFatma Kılınç-Karzan Gérard Cornuéjols
July 21, 2014