Embed Size (px)
Citation preview

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Needle Placement Robots
Gabor Fichtinger, Ph.D.Director of Engineering,
Assistant Research Professor of CompSci & Radiology
Engineering Research Center (ERC)for Computer Integrated Surgical Systems and Technology
Johns Hopkins University
email: [email protected]

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Why Percutaneous? • Potentially significant impact on medical practice
• Minimally invasive (compared to open surgery)• Faster recovery• Less morbidity• Fewer complications• Lower cost• Repeatable in many indications
• Sharply increasing number of procedures
• Engineering opportunities and challenges• “Needle puncture” process well characterized• Right mix of simplicity and complexity• Major challenges:
• no visibility• no access• no room to maneuver• no room to recover

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Clinical Scope of Our Investigation
Spine$120 billion cost
70% of population affected in lifetime
Bone400,000 metastatic
cases/year
LiverMetastasis from colorectal cancer
130,000 new /year60,000 death /yearHepatitis worldwide
Prostate200,000
cancers/year1M biopsies /year
10M BPH currently25% of men affected
in lifetime
Why these?• Societal impact in US and worldwide• Clinical buy-in• Pre-existing experience• Suitable mix for prototype CIS engineering
United States numbers

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Our vision: “Point & Click Surgery”
Digitalimages
Planning & control computer
Patient
Physician
Imager
Robot
Coordinates

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Neuromate (ISS)

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
IGOR (Lavallee, Troccaz, et al)

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Hippocrate Robot E.Degoulange, et al

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Serial RobotsWhere all joints move at all times
Pros:• Can move virtually anywhere• Lots of different motions • Smooth motion• Can work like human limbs
Cons:• Hard to constrain• Safety concerns• Complex control• Ugly math• Aggregating errors from each joint

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Decoupled RobotsWhere joints can move selectively
Pros:• Separates steps of surgery• Easy to constrain• Simpler control• Simpler Math• Small errors
Cons:• Limited types of motions • Limited trajectory• Feels like Tin Man from Oz

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Benefits• Suits workflow• Safe• Modular
Kinematic Sequence for Needle Placement
3D translation“move needle
to entry”
2D Rotation“orientneedle”
1D/2D Insertion“drive needle”
Remote Center of Motion Concept• Stationary fulcrum point• Invented by Russ Taylor at IBM
1 2 3

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Remote Center of Motion (RCM)
• 2 DOF rotation
• Mechanically constrained motion center
R. Taylor, D. Stoianovici, L. Whitcomb, A. Barnes

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Remote Center of Motion (RCM)
Dan Olson, undergraduate
Salcudean, UBC

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Alternate RCM implementations:
Parallel linkages
Goniometer arcs Mitsuishi, et al.

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Chain drive RCM
• No friction• No backlash• 2x360o range• 1.6 kg• 20 cm

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
3DOF comboNeedle
1-DOF needle injector w/ mounted stereotactic fiducials
Joysticks and safety switches
Amplifier box
Table side robot mount
2-DOF Remote Center of Motionrobot
7-DOF passive arm
Locking arm

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Our vision: “Point & Click Surgery”
Digitalimages
Planning & control computer
Patient
Physician
Imager
Robot
Coordinates

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
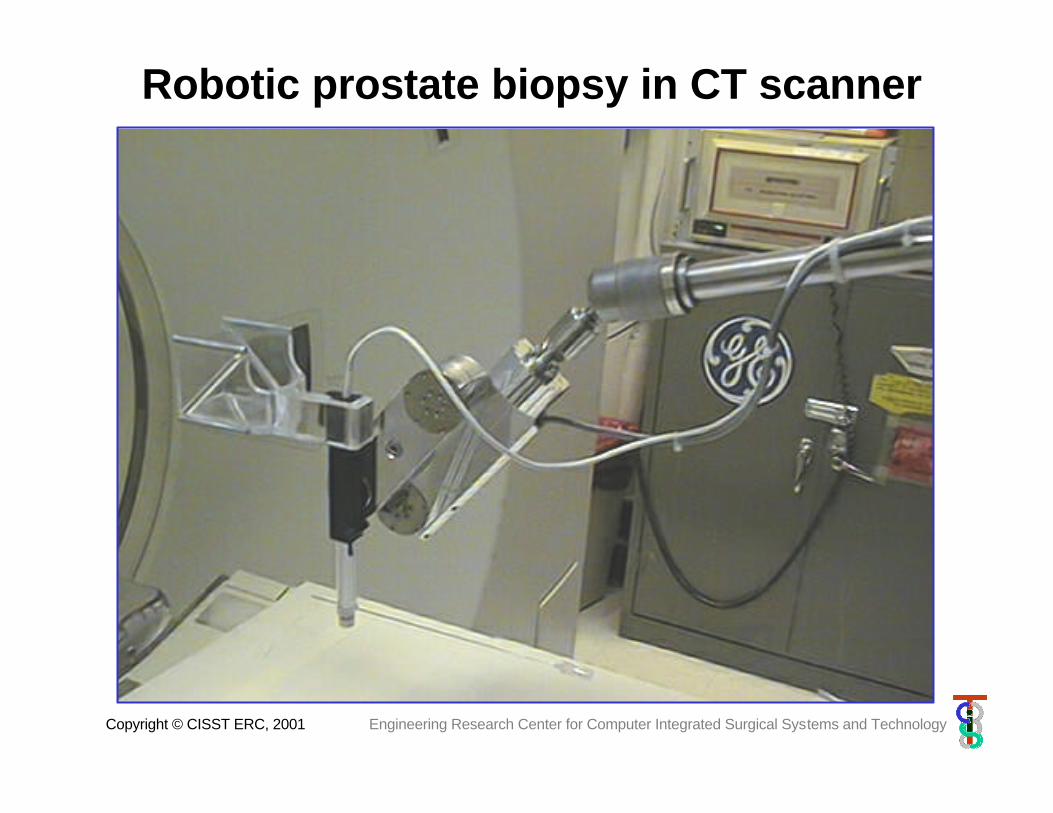
Robotic prostate biopsy in CT scanner
Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Robotic prostate biopsy in CT scanner

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Robotic prostate biopsy in CT scanner
Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
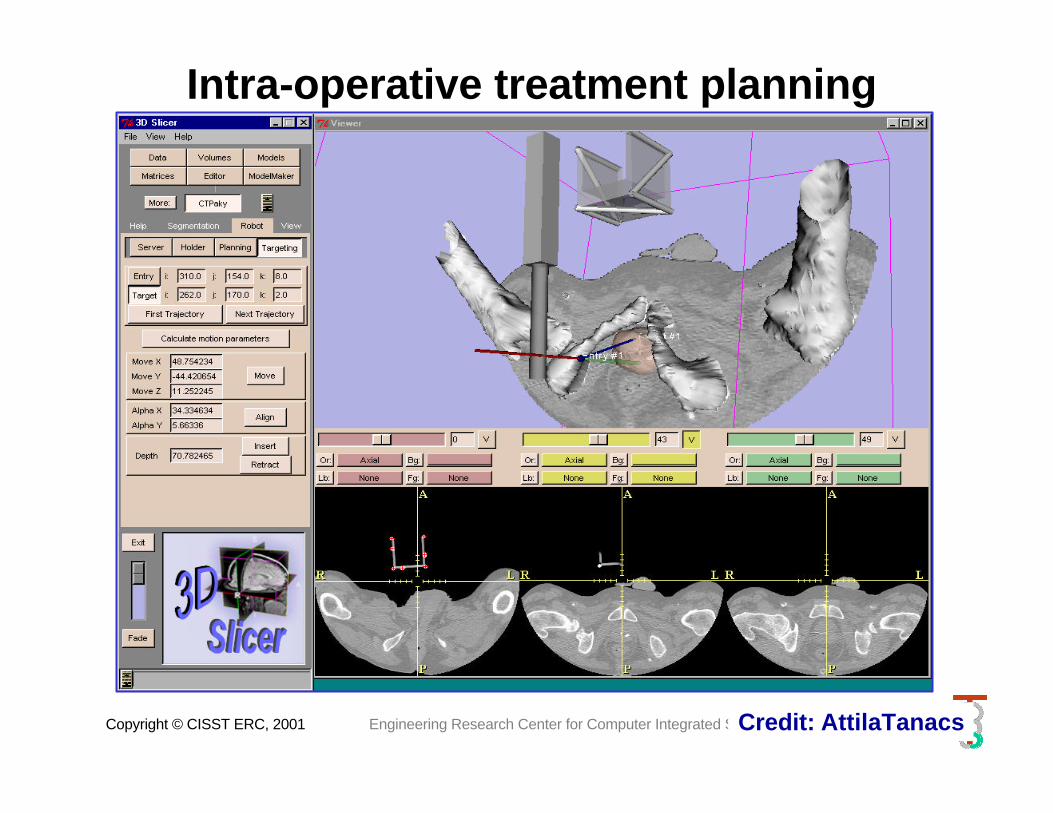
Intra-operative treatment planning
Credit: AttilaTanacs

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCredit: AttilaTanacs
Intra-operative treatment planning

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Transfer to kidney biopsyRobot registered to CT from a single image using stereotactic frame on the end-effector
Photos: D. Stoianovici, L. Kavoussi, A. Patriciu , S. Solomon (JHU Bayview)
Other contributors: R. Susil, G. Fichtinger, K. Masamune, R. Taylor (JHU WSE)

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Transfer to lung biopsy…Robot registered to CT using the scanner’s alignment laser
Credit: D. Stoianovici, L. Kavoussi, A. Patriciu , S. Solomon, JHU Bayview

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Treatment planning & monitoring computer
Physician
Ultrasound
Robot
Patient
Robot control
Robotic brachytherapy with US guidance

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Replace the patient with phantom

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Robot OperatorPatient
Ultrasound
Computer
The system

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
7-DOF passive arm
2-DOF rotation motion stage
1-DOF Needle insertion stage
Ultrasound stepper
Mounting bridge
Ultrasound probe
3-DOF Cartesian motion
The robot

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Ultrasoundprobe
Patient (anthropomorphic
Phantom)
Robot
Needle
Insertion of Tilted Needles

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Intra-operative Display

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Intra-operative Display

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Intra-operative Display

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Steady Hand microsurgery robot
R. Taylor, D. Stoianovici, L. Whitcomb, A. Barnes

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
SteadyHand microsurgery robot – inner ear surgery
R. Taylor, D. Stoianovici, L. Whitcomb, A. Barnes

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
RCM in ultrasound: Salcludean ultrasound robot

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Goldberg’s US robot

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Robot-Assisted Volume Scans
Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
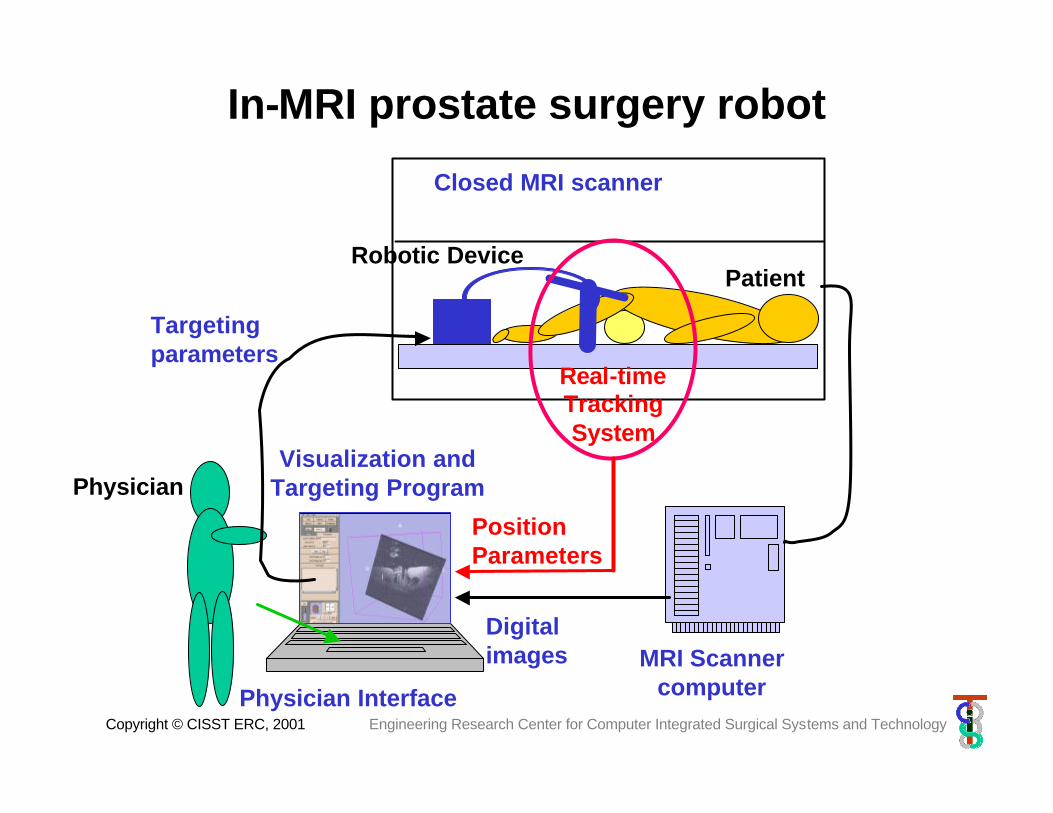
MRI Scanner computer
Patient
Closed MRI scanner
Robotic Device
Physician
Digital images
Visualization and Targeting Program
Physician Interface
Targeting parameters
Real-time Tracking System
Position Parameters
In-MRI prostate surgery robot

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Where is the prostate?

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Robotic Device: Degrees of Freedom
Transrectal probe with curved needle channel
Biopsy gun
Degrees of freedom:
1. Rotation
2. Translation
3. Insertion
Prostate

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
• Good tissue contrast. MRI has excellent sensitivity for detecting tissue abnormalities.
• May allow for ‘targeted’ biopsy and improved diagnostic sensitivity
Why Use MRI?

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Technical challenges
• Small space inside scanner à Dexterity
• High magnetic field à Material compatibility
• No metal (VIDEO1 VIDEO2)
• No electronics
• Real-time imaging/tracking
• Curved needle placement à Actuation

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Stationary rectal sheath
Positioning mechanism(rotates & translates needle guide)
Needle driver
Positioning arm
Full view of the robot

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Six dogs so far
In-vivo canine experiments

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Trocar tip Canula
Brachytherapy seed
Results: Brachytherapy Seed Placement

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
1cm
Brachytherapy Seed Placement (1)
Target Needle Placement Seed Placement

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
Coaxialline
RF ablator +MRI antenna
Smart Needle
Acts inside the body
Needleturns a corner
Local imaging
Integrated Point&Click System
Digital images MRI Scanner
computer
Control computer
RobotPatient
Physician
Closed MRI scanner
Pushing the limits in many aspects
All-plastic robot
Real-time tracking

Copyright © CISST ERC, 2001 Engineering Research Center for Computer Integrated Surgical Systems and Technology
THE END
Questions?
Comments?





![Needle and Biopsy Robots: a Review - Springer · 2021. 3. 4. · ] Needle insertion medical robot for tumor surgery Computer vision 2 DOF for needle guide, 2 DOF for tumor manipulation](https://img.dokumen.tips/doc/110x75/614374de6b2ee0265c020eb6/needle-and-biopsy-robots-a-review-springer-2021-3-4-needle-insertion-medical.jpg)




















![[Clement Hal] Clement, Hal - Needle 1 - Needle](https://img.dokumen.tips/doc/110x75/577cb1001a28aba7118b67ae/clement-hal-clement-hal-needle-1-needle.jpg)

