Embed Size (px)
DESCRIPTION
The trusted source for defence technology information since 1976
Citation preview

swimming in uncertainwaters
NavalRobotics
Cover Compendium Naval:Armada 10/1/14 7:44 PM Page 3

Cover Armada Oct 2014.qxp:Armada 10/7/14 4:15 PM Page 1

03
The Double Eagle, here aMkIII, can be equippedwith amanipulator arm,but can carry all mannerof sensors and sonars
either in belly centrelineposition or cross-mounted
under its chin. (Saab)
Swimming inUncertain Waters
Although navies have used roboticsystems of many kinds at sea fordecades, vast untapped potentialremainsandanalysts arebeginning
to regard the sector as the next focus ofpotentially disruptive technologies. “Themost significant advances or changes toexisting force structure involving substitutionof unmanned systems in the near term willlikely come on the ground, at sea, andundersea”, wrote Samuel J Brannen, leadauthor of Sustaining the US Lead in
Unmanned Systems, a report published inFebruary2014by theCentre forStrategic andInternational Studies (CSIS), which regardssuchadvancesaspotentiallydouble edged forthe United States. “The Navy has movedslowly in the development of unmannedsurface vehicles (USVs), but is clearlycommitted to exploring the capabilities ofunmanned underwater vehicles (UUVs),including its ongoing experimentation withthe large-displacementUUV.The technologyis potentially transformative in undersea
warfare, includingas adisruptive technologythat could erode the United States’asymmetricadvantage inthedomain.”Keentoensure that this does not happen, Chief ofNavaloperationsAdmiral JonathanGreenertputa roadmapwithmilestones toadvance thetechnologyamonghis toppriorities for2014.
I SURFACEIn its analysis, RAND found threeopportunities for the use of surface vehiclesystems that it describes as “mission-transcendent”.The first of these exploits theircontactwith theunderwater andairdomainsto facilitate communication between them,
Peter Donaldson, inputs from Eric H. Biass
Underwater, there is an established and growingmission set that includesmine huntingand disposal, battlespace preparation, 3Dmapping, lost object recovery, payloaddeployment and recovery, ship hull, harbour, port and underwater infrastructureinspection,with newmissions such as submarine track and trail taking shape.The leastwell developed sector - described in a 2013 RAND report as vigorous butnarrow - is that of USVs,withmost focused on observation and information collection,characterisation of the physical environment.
Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 3

also gaining leverage from relatively largepayloads, reserves of power and longendurance to provide services such astransport, launchand recovery andelectricalpower for other unmanned vehicles. Thesecond hinges on their potential to operatesuccessfully anti-access/areadenial (A2/AD)strategies by reducing risks to humans andlarge capital assets; “dispersing capabilitiesinto small, hard-to-target nodes andexpanding tactical choices by creating newconcepts of employment.” Thirdly, RANDconcluded thatmore investment in researchand development could lead to transfer ofuseful new technologies to other mannedandunmanned systems.
RAND also concluded that advances inautonomy and assured communications arecritical for the ability of surface systems toconduct complex missions, particularly incomplex environments, further arguing thatlevels of mission/environmental complexityand requirements for autonomyandassuredcommunications are related in a “controltriangle” analogous to the “iron triangle” -familiar to naval architects – of speed,payload and endurance.
RAND cites sea keeping and surfacetraffic avoidance and general obedience tothe maritime rules of the road, pointing out
that advances in this area could subsequentlybenefit manned platforms by, for example,reducing the number of people needed forwatch standingduties.
RAND also picked out some usefulapproaches to robotic surface vehiclesdevelopment, such as developing standardplatforms andmodular payloads; furtheringoptionalmanning for benign environmentsand for missions in which a human crewwould be desirable;making the post of theirlong endurance potential by designing forreliability and developing optionallymanned refuelling, data transfer andmaintenance vessels to support them and
enabling them to scavenge energy from theenvironment to runmodes and systemswithsmall power requirements.
The think tankalso flaggedupsomeof thechallenges to be faced in maturing anoverarching uninhabited vehicle capability.Firstly, as integrated systems, unmannedsystemsarenotunmanned; theonlypart thatcontains no humans is the vehicle itself.Operations with current technologies haveshown that the numbers required to operateand support adrone systemexceeds that for a“normal aircraft”with a comparable conceptof employment. Also, because they willaugment rather than replace traditionalaircraft, they are likely to increase investmentcosts, at least in the short term, an issueexacerbated by the fact that the so-calledUSVswill be able toperformsomebutnot allof the missions of a large manned warship,and certainly not all at the same time.Furthermore, systems that can’t self-deploywill need transport.
Several autonomousor remote-controlledspeedboats have been developed in recentyears, a field in which again Israel excels, asexemplified by Rafael and its rigid-hullinflatable boat–basedProtector serieswhichare in use in Israel and Singapore, but whichhave also been extensively tested under the
04
“The think tank alsoflagged up some of thechallenges to be faced inmaturing an overarchingunmanned vehiclecapability. Firstly, asintegrated systems,unmanned systems are notunmanned; the only partthat contains no humans isthe vehicle itself.”
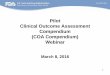
Described by RAND as “vigorous but narrow”, development of USVs ispredominantly focused on observation, information collection and environmentalcharacterisation. This experimental US Navy Powervent vessel added non-lethalweapons in the 2012 TridentWarrior event. (US Navy)
Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 4

05
leadershipofLockheedMartin in theUnitedStates for potential use by theCoastGuards.Still from Israel and named after the
Samurais’ sword (which clearly meansbusiness), the Katana is IAI’s latestdevelopment in the field of autonomousspeedboats. IAI is no newcomer inuninhabited systems, andnot only indronesbut also land robotics – seeour compendiumon this subject published with this issue ofArmada International.Quite clearlybasedonhull designedbyhighspeedpatrol and leisureboat specialist FabioBuzziDesign easily ableto reach speeds of over 65 knots (120 km/h)the Katana was launched in February 2014.In the pictures supplied by IAI, no weaponsare visible, but there is every reason tobelievethat these couldbe incorporated to customerrequirement. Quite visible on the forwarddeck though are self protection grenadelaunchers,while flankedbyvarious antennaea TamamMini Pop-based stabilised electro-optical sphere rests on the upper shelf of theaft structure – a commanding position thatis least affectedby thevertical plane rotationsof the hull. Just below it is a maritimenavigation radar. According to IAI theKatana is capable of autonomous navigationand to this end incorporates an obstacleavoidance systemandabeyond line-of-sightcommunications system.Underwater, the biggest challenges are
different. Lack of access to atmospheric airmakes achieving long endurance whilestoring enough energy to run demandingpayloads very difficult. One solutionresonates with non-nuclear submarinepractice of combining a snorkel-fed internal
combustion engine with batteries forexample to produce a vehicle with limitedunderwater endurance but much longermission endurance thanks to the ability torechargeat the surface.Anotherapproach is touse a very low energy propulsion system,particularly where endurance is at a muchhigher premiumthan speed.
I GLIDERS RULE ENDURANCE MISSIONSOne of the most promising types, thebuoyancydrivenglider, does exactly this andis carving itself a growing niche in bothscientific and military operations. Needingneither a propeller nor movable controlsurfaces, gliders use an electric pump totransfer oil between two chambers, oneinside and one outside the pressure hull tochange the vehicle’s density relative to thewater around it and thus its buoyancy.As it rises or sinks in the water, wings
generate apositiveornegative lift vector thatpropels the vehicle forward. By tilting thebattery pack laterally inside the hull, thecontrol systemrolls the vehicle left or right tosteer it. This is a very slow but very energy-efficient means of propulsion that enablesgliders to stayat sea formonths travelling, as arule of thumb, at “half a knot on half aWatt”.Burst communication via Iridium satcomandGPSnavigationupdates takeplacewhenantennae on the tail periodically break thesurface. Networks of gliders are showingpromise inmanykindsof navalmissions.Exploring their potential for ocean
monitoringwas the focus ofNato experimentREP14-MEDconductedfrom06to26June inthe Sardinian Sea and led by the Centre for
Maritime Research and Experimentation(CMRE). Aboard research vessels Alliance(Nato)andPlanet (WTD71,Germany)andatresearch centres ashore, scientists andengineers from 21 partners and six nationshave been testing new systems, technologiesandsolutionsforoceanmonitoringandseabedcharacterisation to improve EnvironmentalKnowledge and Operational Effectiveness(ekoe)capabilities, says theorganisation.Gliders from Britain, Germany, France,
theUnitedStates, theCentre and frommanydifferentmanufacturers and institutions putto sea together tocollectoceanphysicaldata toimprove the performance of ocean forecastmodels. Information from the gliders isexpected to help diagnose and predictphysical properties of the waters west ofSardinia, develop and test efficient samplingstrategies, develop and test new methods tocharacterise the seabed, record underwaterambientnoiseand test recentdevelopments inunderwater observation techniques.The Centre for Maritime Research and
Experimentationoperated its gliders fromitscontrol room in La Spezia, including hybridtypes able to switch from buoyancy-drivenpropulsion to less efficient, but faster,propeller locomotion to transit betweenpatrol areas.Consortium partners include the Area
Marina Protetta Penisola del Sinis and theIstituto per l’AmbienteMarinoCostiero delCNR, both active in the local area. Theircollaboration is intended to increase levelsof automation in and improve theeffectiveness of coordinated geographical,meteorological and oceanographic supportforNato operations.Among the participating glider types was
theSeaExplorer fromFrenchcompanyACSAALCEN, a V-tailed design without wings orexternal moving parts, characteristics thatreduce the risk of entanglement in debris orweed and of leaks. A relatively high ballastvolumemeans thatSeaExplorer travels atoneknot, twice as fast as typical comparablegliders according to the company.Rechargeable lithium batteries provide twomonths endurance and typically 1,200 kmrangeona single charge.
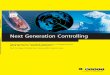
MCM in general andminehunting in particularis one of the establishedmission sets for navalrobotics and the LockheedMartin RemoteMinehunting System is central to the LCSMCMmission set. Here, the diesel-enginedsubmersible is launched carrying an AQS-20Atowed sonar. (USNavy)
Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 5

I NATO FURTHERS INTEGRATION,CO-OPERATION AND FUSIONIn parallel, the organisation brought newdata fusion, maritime asset allocation andunderwater communication capabilities toits participation in the NATO CoalitionWarrior Interoperability eXploration,eXperimentation, eXamination, andeXercise (CWIX) from02 to 19 June.Held inBydgoszcz,Poland, the2014exercisebroughttogether fifteen Nato Nations, four partnernations and twelve Nato commands and 175“capability configurations” to conduct morethan 3,000 interoperability tests, all of whichcouldenhancetheuseofnaval roboticsystemsandtheir integrationwithmannedassets.CMRE’s contribution to the situational
awareness enhancing Fusion as a Service(FaaS) idea is a tool that uses theCollaborative Multi-Sensor/Source Fusionand Tracking (Commsoft) concept. Thisrapidly merges data from new sensors andsources to provide more detailed, accurateand timely information to the commandandcontrol chain.The asset allocation capability is a
maritime decision support tool thatprocessesmeteorological andoceanographicdata, and provides adaptive density maps ofrisks which could help decision-makers to
forecast scenarios. During CWIX, Natoplanned to test the capability virtually in theIndianOceanoncounter-piracy scenarios.CMRE’s sub-sea contribution was the
UnderWater Networked Communication(UWNetCom) capability developed in theCo-operative Anti-Submarine Warfareprogramme to enable real-timecommunication and interoperability amongunderwatervehicles,mannedandunmanned.In theexercise, twoOceanExplorersbuilt andrun by Florida Atlantic University and anactive acoustic source were simulated assupport platforms, gathering and passing oninformation on asset positions, underwaterdetectionsandtracks,andenvironmentaldatato themaritimesituationalawarenessservices.The North Atlantic Treaty Organization
has alsobeenworking to advance the state ofthe art innaval robotic co-operation througha programme known asMorph, a EuropeanCommission effort to test multi-vehiclecoordination and formation manoeuvringbasedonecho location.In sea trials that took place in July of 2013
off the coast of Toulon in southern France atthe European Centre of UnderwaterTechnologies, which is part of the FrenchInstitute forExploitationof theSea (Ifremer),the above-mentioned Centre for Maritime
ResearchandExperimentationdemonstratedsoftware for combined data communicationand ranging technique for underwateracousticnetworks.Using frequencies selectedto optimise range and signal-to-noise ratio,the system exploits the precise time taggingprovidedbyacousticmodemsandknowledgeof local sound speed through the water toinfer theacousticpackets’ timeof flight.This,says the Centre, permits underwater robotsto work together, navigate in formation andsharedata, resulting inawell-organised flockofvehicles: anunderwater systemofmultiple,heterogeneousmarine robots that cooperate.The Morph programme is due to becompleted in2016.
I MULTISTATIC ANTI-SUBMARINEWARFAREThe biennial Proud Manta series of majorNato anti-submarine warfare exercises hasprovidedopportunities to test a rangeof ideasand the 2013 event saw the Centre forMaritime Research and Experimentationexperiment with amultistatic concept usingautonomous underwater and surfacevehicles, an active sonobuoy, a submarineacting as a target and the NRV Alliance. Apair of autonomous underwater vehiclesused towed passive sonar arrays to
06 Compendium Naval Robotics 2014
Obviously developed by IAI with speed inmind and for very rapid intervention as
suggested by its Fabio Buzzi Design Stabseries speedboat platform, the Katana
system suite, which includes autonomousnavigation capability can be adapted to
other hulls. (Albatross)
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 6

triangulate and locate anything target likethat echoed transmissions from the activebuoy.Embeddedsignalprocessingdevelopedby theCentre enabled each vehicle to form amultistatic viewof thebattlespace, includingtheir detections, which they communicatedto the Alliance though a long-range, low-frequencyacousticmodems for fusionon theship’s sonardisplays.Alsoparticipating in thedemonstrationwas aWaveGlider acting as amobile gateway to re-transmit acousticmessages from the autonomous underwatervehicle via radiodatalink to theAlliance.
Developed by Liquid Robotics, theWaveGlider is a very elegant vehicle thatexploits wave motion to provide forwardpropulsion. The vehicle consists of a floatconnected by a long tether to a submergedunit with multiple wings, each of whichpivots along its span-wise axis to produce aforward-thrust vector as the waves lift anddrop the float. The tether is long enough toput the submergedunit below thebulkof the
vertical wave motion, so that the tether liftsit through the water column when the floatrises (if the tether were too short, thesubmergedunitwouldbe inside thewaveonwhich the surface unit is floating and wouldnot generate thrust). The float module isfittedwith solar panels to power sensors andradio equipment.
I DARPAAnother focus for innovative ideas in navalrobotics is, of course, the US DefenceAdvanced Research Projects Agency withprogrammes including theASWContinuousTrailUnmannedVessel (Actuv),DistributedAgile Submarine Hunting (Dash) andUpward Falling Payloads (UFP). The mostrecentof these to surface is the latter, the aimsof the second phase of which were outlinedon26March.Theoverarchingpurposeof theprogramme is to develop deployable,unmanned, non-lethal distributed systemsthat would lie on the deep-ocean floor in
Buoyancy-driven gliders can remain at sea formonths and Nateo is exploring their potential toimprove environmental knowledge andoperational effectiveness through long termoceanmonitoring and seabed characterisation.ACSA ALCEN’s Explorer took part in REP14-MEDthis summer. (ACSA ALCEN)
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 7

special containers for years, waiting for USforces to activate themremotely fromdistantcommand centres, recalling them to thesurfacewhenneeded.This is awayofputtingselected capabilities in position inpreparation fordistant crises in the faceof thecost and complexity that limit thenumberofships andweapon systems that theNavy cansupport in forwardoperating areas.
I UPWARD FALLING PAYLOADSThe conceptual system would consist of a“payload”, which executes waterborne orairbornemissions afterbeingdeployed to thesurface, a “riser” that provides encapsulationand launch, and the communications systemthat triggers the launch.
During Phase 1, the Darpa studiedapproaches to long-range communications,containment systems able towithstanddeepocean pressures, methods of launchingpayloads and likelymissions for them.
“In this firstphase,we really learnedabouthow the pieces come together, and built acommunityofdevelopers to thinkdifferentlyaboutunmanneddistributedsolutions for themaritime domain,” said UFP programme
manager Andy Coon. “The trick is to showhow these systems offer lower-costalternatives to traditional approaches, andthat they scalewell to largeopen-oceanareas.”
InPhase2, theorganisationintendstoapplywhat ishas learnedtodevelopandemonstrateprototypes and is putting together teamsexperienced in deep ocean engineering andpayload development. In particular, theAgency is looking for what it describes astechnology communities that can team toprovide expertise and innovation for smallsensors, expendable and small unmannedsystems, distributed communications andnavigation technology, novel long-rangeunderwater communications, and long-endurancemechanical and electrical systemsthatcansurvive foryears indormantstates.
“As long as you can command the nodesremotelyandquickly, anddon’thave to sendaship out to launch it, you’re in good shape.Some Phase 1 approaches were more exoticthanothers, butwewerepleasedby the rangeof challengingoptions,” saidAndyCoon.
UFP funding for FY 14 is US $11.913millionwithactivity focusedonsystemtradestudies leading toconceptualdesigns, analysis
to characterise long-range, deep-seacommunications and development ofconceptual designs for containment andlaunch systems. Funds increase in the FY 15estimates to$18.964million, andplanscentreon developing a payload and a riser anddemonstrating them along with a surrogatecommunication system to initiate adeployment from an intermediate depth.Developmentof communication subsystemsis also set tobegin inFY15.
I DISTRIBUTED AND AGILEStill in deep water, the Dash programmeseeks to couple deployed sonar nodes withlong-endurance autonomous vehicles todetect, track and trail hostile submarines.From their very quiet deep ocean point, thesonarnodeswouldhavea large fieldofview inwhich to detect submarines passingoverhead. The defence research agencyequates these sonar nodes to submergedsatellites and calls them “subtulites”, arguingthat their significant field of view and thelow-noisephenomenaat extremedepthswillpermit a scalable number of collaborativesensor platforms to detect and track
08 Compendium Naval Robotics 2014
With its ability to launch, recover and manage a wide variety of unmanned platforms, the NRVAlliance has been active in many Nato CMRE experiments, including multistatic ASW work duringProud Manta 2013 in which autonomous underwater vehicles towed sonar arrays. (NATO)
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 8

submarines over large areas. The Dash alsoaddresses shallow water areas withdistributed sensors, but exploits “non-acoustic” sensing fromabove.Theprogrammehas so far developed two
prototype systems: the fixed passive sonarnode, (which the Agency terms the Traps(Transformational Reliable Acoustic PathSystem), and the Shark (SubmarineHold AtRisK) uninhabited underwater vehicle, withthe latter intended to be an active sonarplatform to track submarines after initialdetectionby theTraps.Successful tests of both prototypes were
announced inApril of 2013.DevelopedbyanSAIC-led team, the small, energy frugal andexpendable Traps node sent data to astationary surfacenodevia acousticmodems,with further secure reach back to the SAIC’sfacilities via satellite. The Shark is underdevelopment by a team lead by AppliedPhysical Sciences and is based on a BluefinRoboticsBluefin21vehicle,whichcompletedits first tests at depth in February 2013.As ofApril 2013, the two were due to be testedtogether, with subsequent work likely toinvolvemultiple sonarnodes and integrationof an active sonar into the Shark.While no further announcements on the
Dash programme have come from theDarpa, the programme remains in the FY2014 budget with US $28.943 millionallocated and in the FY 15 budget estimatesat the considerably reduced level of $8.474million and is slated for transition to theNavy. Headline achievements during FY 13
includeddemonstrationofpassive andactivesonarprototypes scalable to largedeep-oceanareas for wide area surveillance andmanoeuvre warfare. The system showed theability of both types of sonar to detectAmerican submarines and the “scalability”to detect the quietest of threat diesel electricsubmarines.Testingof the initialmulti-nodecommunications network for persistentconnectivity “from sea floor to shore” alsobeganduring this period, as didplanning for
demonstration of multi-node systems.Finally, the team completed “discovery andassessment” of non-acoustic signatures.Plans for FY2014 include completing the
development of the deep-sea sonar nodeprototypes and the distributed, multi-nodecommunications system, demonstratingextended remote monitoring of a passivesonar barrier network at sea anddemonstrating the uninhabited underwatervehicles-based active sonar’s deep seadetection and tracking capabilities. The lastgoal for FY 14 is to integrate technologiesfor “autonomous, reliable and secure”transfer of energy and data to fixed andmobile undersea systems.Looking ahead to FY 15, the Dash
programme plans include extending theendurance of the active and passive sonarnodes and demonstrating this capability atsea against a target, demonstratingconnectivity from the sea floor to a remoteshore station and integrating the distributedcommunications system with US Navy datatransfer andC4I systems.
09Compendium Naval Robotics 2014
The Darpa ASWContinuous Track and Trail Unmanned Vessel (Actuv) effort seeks to developa robot that can track and trail quiet conventional submarines for long periods, after rapidtransit to the target area and acquisition of a quarry detected by a third party. (Darpa)
Uninhabited seagoing robots are in contactwith the air and underwater domains, makingthem ideal gateways between the two.Pictured is aWave Glider from Liquid Robotics,a long-endurance, wave-driven vehicle thathas participated in Nato antisubmarinewarfare experiments as a communicationsnode. (Liquid Robotics)
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 9

I ACTUV – THE UNINHABITEDSUB CHASERThe Actuv (ASW Continuous TrailUnmannedVessel) programme is an effort todevelop an uninhabited sub chaser that cansprint fromaport or patrol area to reacquireand trail a hostile submarine detected byother means. Its first goal is to build anddemonstrate an experimental platformwithbeyond state-of-the-art performance anddesigned from the outset for uninhabitedoperation. The second is to show thatoperating autonomous underwater vehiclesat theatre or global ranges, from forwardoperating bases and using a sparsesupervisory control model is feasible. Thethird and final top level goal is to use theActuv’s unique characteristics to evolve agame changing anti-submarine warfarecapability for theUSNavy.Because nobody is intended ever to step
aboard an Actuv at any point in itsoperating cycle, designers are notconstrained by habitability considerationsand can concentrate on achieving what theAgency terms disproportionate speed,endurance and payload fraction. Actuvsmust have sufficient situational intelligencemeans to comply with the rules of the roadand maritime law to enable them tonavigate safely through operationaldeployments lasting months and coveringthousands ofmiles.With innovative sensortechnologies, it is designed to provide alow-cost system offering a fundamentallydifferent risk calculus and one that candetect and track even the quietestsubmarine threats. Key technical areasinclude vessel design methodologies, shipsystem reliability, high-fidelity sensorfusion, novel application of sensors for anti-submarine warfare tracking, and holisticsystem integration.
Detailed design and the critical designreview were completed, critical enablingtechnologies were demonstrated and anintegrated system demonstration withsurrogate Actuv hardware in the loop wascarried out during FY 13. The key activitiesfor FY 14 are sensor testing on a surrogateplatform, starting construction of theprototype vessel and integration ofmissionhardware and software into the platform.Completion and testing at sea to validate theperformance of the vessel, its sensor systemand autonomous capabilities are scheduledfor FY 15. Budget allocations for FY 13 and14 were US $37.4 million and $20.831million respectively, with the estimate forFY 15 at $11.865million.
I EXPERTISE FROM THE NORTHWiththeexposedpositionof itsBalticcoasts toincursions fromtheSovietnavy’s submarinesand the necessity to keep the Oresund straitunder narrow surveillance and cleared ofmines at all times during the Cold War,Sweden has developed a strong expertise inshallowwater sonars anddetectors.To cut a long story short, and drawing on
experience gained from computer controlledunstable configurations, notably with theGripen, Saab embarked on the developmentof unstable underwater robots. One of theunderwater vehicles to have pioneered theconcept was the Double Eagle. Through itstwo main shrouded rear propellers and sixsecondary thrusters, this remote controlledsystem (see illustration herewith) has theability tomoveinthethreeaxeswithdiabolicalprecision which enables, for example, itstelescopic arm to deposit with extremeaccuracyadetonatingchargenearamine.TheDoubleEagle can carry allmannerof
sensors, and more particularly scanningsonars. The Double Eagle is agnostic in this
The Shark (Submarine Hold At Risk) is part of the Darpa’s Distributed Agile Submarine Hunting(Dash) programme that aims to team a long-endurance underwater robots with a deep- seasensor network known as the Transformational Reliable Acoustic Path System, Traps. (DARPA)
10 Compendium Naval Robotics 2014
In Darpas’s Upward Falling Payloads (UFP)concept, unmanned vehicles would be storedon the deep seabed in special containers foryears before being called into action toperformwaterborne or airbornemissions;payload, “riser” and communications are keyelements. (Darpa)
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 10

respect, and the French Navy’s units forexample carry a Thales TSM 2022. The MkII andmore powerfulMkIII (with four largeaft propellers) iterations of theDouble Eaglecan be untethered and run autonomouslyand return home, in which case they areknown as the Double Eagle Sarov – a namethat has little to do with the eponymousRussian city, but much more with SaabAutonomousRemotelyOperatedVehicle.
One of the fortes of the Double Eagles inmine-sweeping operations is their ability toswim ahead of theirmothership, preventingthe latter to sail into trouble’sway. Inaddition,shouldpushbecomeshove inaperilousminedisposal mission, the robot has the ability toitself launch a swimming charge, a twin-propelleddeviceby thenameofMineSniper.
I INSPIRATION FROM NATUREAs inother areas of robotics andengineeringgenerally, taking ideas from nature isincreasingly important for machinesintended to work at sea. There are manyexamples of robots that mimic marineanimals, but two that stand out are BostonDynamics’ BioSwimmer, which looks andmoves like a tuna, and jellyfish-inspiredvehicles that are the subject of research anddevelopmentR&DatVirginiaTech.Tunaarefamously fast – the yellowfin tuna can reachabout 75 Km/hour – accelerate rapidly andswim efficiently over awide range of speeds.
Importantly for anautonomous tunamimic,the front of the body remains stable despitethe side-to-sidebeatingof the tail,making lifeeasier for any sensors. Jellyfish, on the otherhand, are very slow but extremely energyefficient as they propel themselves withpulsations of their bell-like bodies.
One of the most ambitious bio-inspiredcreations, however, is intended to operateaboard ship to take on the dangerous role ofputting out fires. The Saffir (ShipboardAutonomousFireFightingRobot) isanOfficeof Naval Research project to develop ahumanoid robot “capable of finding andsuppressing shipboard fires and workingseamlessly with human fire fighters”. Withtheir hatches, coamings, ladders andcorridors, warships are designed to allowhumans to move around them and presentmajor problems to machines that roll onwheels or tracks and that cannot hold on torailings, soarobotwithahuman-likephysiqueought tohavesome inherentadvantages.
A candidate for the Navy’s DamageControl Technologies for the 21st Century(DC-21) programme, the Saffir is designedto be able to walk in any direction, keep itsbalance inhigh sea states, negotiateobstacles,manipulate fire fighting equipment, useexisting thermal shielding equipment andfind itsway around the shipby itselfwith theaidof a suiteof sensors.Theability to respondto gestures and commands will help it toworkwith its humancounterparts.
Robotics has established itself in severalniches at sea and is expanding into newonesat a rate limited largely by budget andimagination.
STATE OF THE ARTWhat follows is an overview of currentcapabilities offered by industry around theworld, and they are listed in manufactureralphanumerical order.
Boston Engineering’s tuna-shapedBioSwimmer is one of many nature-inspiredrobots emerging from academic research anddevelopment that seeks leverage from aeonsof evolution to create efficient vehicles - asuccessful tunamimic could be both fast andstable. (Boston Engineering Corporation)
The US Navy’s experimental ShipboardAutonomous Firefighting Robot, the Saffir, isdesigned to find and suppress shipboard fires,working seamlessly with human fire fighters,its human-like physique an advantage in anenvironment full of ladders, hatches andcoamings. (US Naval Research Laboratory)
This chart illustrates the innumerableconfigurations that can be hadwith theDouble Eagles inMkII andMkIII forms. (Saab)
11Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:40 PM Page 11

5GMarine
EclipseLength: 11 mSpeed:40 to 50 kt depending on propulsionsystemPayload: Sensor suite options include high-resolution radar, EO turret with thermaland day TV cameras, Bosch day/nightactive IR marine camera, through-hullsensors, loud hailer
Propulsion: 2 x 550 hp Fiat N67500 dieselengines driving Rolls Royce Kamewa waterjets, 2 x 13 kW electric motors for lowspeed operationsNotes:Eclipse produced by 5G Internationalof North Palm Beach, Florida and boatbuilder Al Seer Marine of Abu Dhabi.
BravoLength: 36 ft (11 m)Speed:40 to 50 kt (74 to 93 kph) dependingon powerplant
Notes:An autonomous RHIB that can beoperated manned or unmanned, with theinsertion/extraction role in mind, aimedprimarily at special forces applications.
Sea SerpentLength: 9.84 or 13.1 ft (3 or 4 m) Notes: High speed unmanned RHIB built
by a partnership between Al Seer Marineand 5G International. The Sea Serpent isdesigned for surveillance and securitymissions in near coastal areas and can becarried by larger craft.
AAI Corporation
Fleet Class Common UnmannedSurface VesselWeight: 7.7 tonnesLength: 39 ft (11.88 m)Speed: 28 kt (52 kph)Endurance:48 hoursRange: 1,200 nm (2,222 km) cruisePayload:Bay measures 14 x 6 x 3.5 ft (4.26 x1.83 x 1.067 m)
Notes:With a tow capacity of 5,000 lb (2,268kg) at 10 kt (18.52 kph), CUSV pulls an L-3Klein 5000 side scan sonar for minedetection and deploys an Atlas SeaFox UUVfor mine destruction in US Navy Service.AAI Textron, General Dynamics RoboticSystems and Maritime Applied PhysicsCorporation cooperatively designed it forASW, ISR and ASuW missions, plus launchand recovery of UAVs and UUVs.
ACSA
BasilWeight:350 kgLength:3.4 mSpeed: 3.5 ktEndurance:8 hoursPayload: 170 kgPropulsion: electric Notes:Described as a self-propelled buoyand a remotely controlled platform for
sensor deployment, the Basil is a small USVthat can navigate and station keep in seastates up to 3. Up to eight BASILs can becontrolled together via ACSA’sFleetManager software, allowing multiplesimultaneous measurements.
SeaExplorerWeight: 59 kg in airLength: 2 m + 0.7 m foldable antennaSpeed: 1 kt maxEndurance: 2 months on one battery chargePayload:8 kg (3 kg wet payload, 5 kg drypayload and electronics)Propulsion:Buoyancydriven with electricpump and Li-ion batteryNotes:Wingless underwater glider offered
for oceanography and science,environmental protection and monitoring,oil and gas and defence and securitymissions. Military tasks include rapid areaassessment and creation of sound speedprofiles conductivity, temperature anddepth measurements.
Aeronautics Defense Systems
SeastarWeight: 6,000 kgLength: 11 mSpeed:45 kt cruiseRange/endurance: 300 nm + 10 hours onstation
12 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:41 PM Page 12

Payload: 2,500 kg for sensors includingEO/IR cameras, radar, electronic warfare,PA system, non-lethal weapons andstabilised gun with fire controlPropulsion:2 x 470 hp marine diesels withwater jet propulsionNotes:Large, fast vehicle marketed forprotection of harbours, strategic facilities,offshore infrastructure, coastline patrol, ISRmissions, target designation, jamming anddecoy and force protection tasks.
Aselsan
LeventSpeed:30 ktEndurance: 4 hours minimum withoutrunning diesel enginePayload:Mission specific options includingweaponsPropulsion:Diesel engine
Notes:Optionally manned RHIB that can betele-operated or autonomous. Offered forport and shipping security, ISR, coastalpatrol, search and rescue and logisticsupport missions. Can also be used as atarget vessel. Levent USV technology isdesigned for integration into standard boats.
Atlas Elektronik
SeaFox CWeight: 40 kg in airLength: 1.3 mSpeed: more than 5 ktDiving depth:300 mEndurance/range: 1.2 km depending on
current and acoustic conditionsPayload: 1.5 kg shaped-charge warhead,relocation sonar, echo sounder, TVcamerasearchlightsPropulsion:Battery electric with fourhorizontal propellers and one verticalthrusterNotes:One-shot “wooden round” minedisposal vehicle in service with 10 naviesthat typically clears mines four times fasterthan methods using recoverable remotelyoperated vehicles, according to Atlas. Canbe controlled from stand-alone console orintegrated into existing MCMV displays.
SeaFox 1Weight:Approx 40 kg in airLength:1.3 m Speed:more than 5 ktDiving depth: 300 m Endurance/range: 1.2 km depending on
current and acoustic conditions Payload:Relocation sonar, echo sounder,TV cameras, searchlightsPropulsion:Battery electric with fourhorizontal propellers and one verticalthrusterNotes:Recoverable, reusable inspection,training and mine identification version ofSeaFox without warhead. Featuresrechargeable batteries, reusablecommunications cable, no expendable parts.
SeaFox CobraWeight:43 kgLength:1.31 m Speed: -0.5 to 6 ktDiving depth: 300 m Endurance/range:Up to 100 minutes
depending on mission profile Payload: 8 kg, 600 x 480 x 230 mm Cobraordnance disposal charge plus standardSeaFox sensors.Propulsion:Battery electric with fourhorizontal propellers and one verticalthrusterNotes: Addition of detachable Cobra minedisposal tool enables reusable SeaFox todestroy multiple targets at low cost,particularly historical ordnance. RF codedinitiation capability at up to 22 km formilitary version, 1.5 km for commercialvariant.
SeaCatWeight: Approx 160 kgLength: Approx 2.4 m depending onpayloadSpeed:3 to 4 kt typical, 6 kt maxEndurance: 6 10 10 hours
Payload:EdgeTech2200 side scan sonar andTritech Micron DST sector scanning sonaror micro-modem/transponder as standard.Interchangeable options include: TritechGemini imaging sonar, EdgeTech sub-bottom profiler, pan-tilt camera head,custom head with dedicated sensors(sampler, flourometer etc.), Blueview multi-beamsonar, MBES R2Sonic 2022 Notes:Fully autonomous survey UUV designedfor quick mobilization and easy set-up toallow the operator to focus on the surveyplan. Data is directly exportable (time-stamped and geo-referenced) to any majorprocessing package.
SeaOtter Mk IIWeight: Less than 1,000 kg Length: 3.65 mSpeed:7 ktEndurance: 20 hoursPayload: 160 kgPropulsion: Battery electric with stern andvertical thrusters.Notes:Multi-purpose AUV for civil andmilitary operations. Features include twin-
13Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:41 PM Page 13

hull “flat fish”design,modularity applied tostructure, propulsion, energy,communication, navigation andpayload.Missions include:MCM, covert ISR, rapidenvironmental assessment, sea bedmapping, hydrographic survey
Autonomous Surface Vehicles Ltd
C-Target 3Weight: 325 kgLength: 3.5 mSpeed: 20 kt + (25 kt + optional)Payload: Wide range of optional visual,radar & thermal enhancementsPropulsion:30 hp outboard two-stroke or four-stroke petrol engine, inboard diesel available
Notes:Lightweight, swarm capable, highlymanoeuvrable fast marine target boat fornaval gunnery training, weapons testingand ship command and controlassessments. Features a repairable foam-filled aluminium hull, ballistic protectionfor engine and electronics.
C-Target 6Weight: 1,200 kgLength: 6.5 mSpeed:35 kt +Payload: Wide range of optional visual,radar & thermal enhancements
Propulsion: 125 hp outboard 2/4 stroke petrolNotes: C-Target 6 is a powerful fast marinetarget boat designed for offshore use in up tosea state 4 either as a direct fire target or as atow boat for inflatable targets. Swarmcapable, it can be customised to resemblespecific craft or configured as a USV.Features a rugged, repairable aluminiumhull. Can be fitted with a console formanned missions.
C-Target 9Weight: 2,750 kg (unmanned)Length: 9.6 mSpeed: 50 kt +Payload:Can be equipped with a wide rangeof radar, visual and thermal enhancements. Propulsion: 2 x 300 hp Mercury Verado or255 hp Mercury Optimax outboard motors,diesel power optional. Engines recessedwith ballistic protection.
Notes:High-speed, adaptable, survivable,repairable, swarm-capable target boat fornaval gunnery training, weapons testingand ship command and controlassessments. Can tow targets and othersmall craft. Can be operated manned.
C-Target 13Weight:4,200 kg unmanned Length:12.9 m Speed: 45 kt +Payload: can be equipped with a wide rangeof radar, visual and thermal enhancementsPropulsion: 2 x 350 hp Mercury Veradooutboard petrol engines (diesel optionavailable). Notes:High speed, highly realistic, swarm-
capable target boat for use naval gunnerytraining, weapons testing and shipcommand and control assessments.Outboard engines are recessed into aprotected area that along with theelectronics enclosure can be fitted withballistic protection panels. Can tow targetsor other craft, manned operation optional.
C-SweepWeight: 9,000 kg unmannedLength: 10.8 mSpeed:25 kt + (no tow)Endurance/range:more than 200 nm
Payload: Up to 20 kN towing force at 15 kt,options include side scan, multi-beam anddiver detect sonar, clip-on mine sweep orwinch deployed systems, electricalgenerator, daughter AUV launcherPropulsion:2 x 321 kW Yanmar 6LY3marine diesels driving two 0.6 m diameterpropellersNotes:Rugged vehicle designed to offer ahigh degree of directional stability,substantial towing capacity for long-endurance mine sweeping missions and arobust electrical generating capacity tosupport mine sweeping equipment.
C-StatWeight: 450 kgLength: 2.4 mSpeed:3.7 kgEndurance/range:Three sizes offerdeployments of 4 days, 15 days and over 30days at maximum of 250 nmPayload: Integrated sensor payloads can besupplied configured by usersPropulsion:Diesel generator, battery and 2X DC thruster in protected recessesNotes:Offers a new capability in thereliable positioning of sensors at sea forextended durations without need of a shipon station or sea bed anchoring.Applications include surface to subsurfacecomms, port, harbour and ship security,oceanographic data collection.
14 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:41 PM Page 14

C-HunterWeight: 2,000 kg Length: 6.3 m Speed: 8 ktmax Endurance: 50 hours + at 6 kt Payload:multi-beam, side scan sonar.CTD, sub-bottom profiler, PTZ camera,inspection ROV.Propulsion:1 x 30 hp Yanmar 3YM30 diesel engine
Notes: Long endurance work class semi-submersible USV designed for a wide rangeof commercial and military applicationsincluding hydrographic survey, MCM,ASW, AUV/ROV/towfish positioning.Command and control software enablessingle- and multi-unit operations.
BAE Systems
ArcherfishPayload: Target relocation sonar, cameralights, directed energy (shaped-charge)warhead
Propulsion: twin electric propulsors allowoperation in transit mode from launchplatform to target and hover mode duringtarget identification and destruction.Notes: Single-shot mine disposal systemlaunched and operated from surface ships,helicopters and unmanned underwatervehicles. BAE Systems claims a factor of fourreduction in mine clearance time.
Talisman MWeight: 1,000 kgLength: 4.5 m Diving depth:300 mPayload: 500 kgPropulsion:Electric
Notes: With a resemblance to a carbon fibreturtle, Talisman M has remote andautonomous operation capability,integrating remote control with theplatform’s combat system and missionpayloads, combining the detection,classification and neutralisation MCMphases into a single solution.
Talisman LWeight: 50 kgLength: 1.4 mSpeed: 5 kt maxDiving depth: 1 m to 300 m Propulsion: Electric with four vectoringthrusters
Notes: Two-person portable littoral UUVdesigned to be operable from the muchlarger Talisman M UUV thanks to commonnavigation and C3 systems.
Bluefin Robotics
Bluefin-9Weight:60.5 kg (dry)Length:1.75 m Speed: 5 kt max
Endurance: 12 hours at 3 kt with standardpayloadDiving depth: 200 mPayload: Standard payload includes: MarineSonic Technology 900/1800 kHz dual-frequency side scan sonar, Deep Sea Powerand Light MultiSeaCam 1060, YSI 6560 CTprobe, YSI 6136D turbidity probePropulsion: 1.5 kWh lithium polymerbattery, gimbaled ducted thrusterNotes: Lightweight, two-man-portableautonomous underwater vehicle with aclaimed mission turnaround time of lessthan 15 minutes. Intended missions includeinshore survey, environmental monitoringand protection, MCM/UXO, port andharbour security, rapid environmentalassessment, ISR.
Bluefin-12DWeight: 260 kg (dry)Length: 4.32 m Speed: 5 kt maxEndurance: 30 hours at 3 kt with standardpayloadDiving depth: 1,500 mPayload:EdgeTech 2200-MP 120/410 kHzside scan sonar or Digital camera and LED-based strobe are standard payloads,others available
Propulsion:5 x 1.5 kWh pressure-tolerantlithium polymer battery packs drivinggimbaled, ducted thruster Notes:Modular AUV with swappablepayloads and battery modules for in-fieldmission reconfiguration. Applicationsinclude: MCM, UXO disposal, offshoresurvey, search and salvage, environmentalmonitoring and protection, archaeologyand exploration/
Bluefin-12SWeight: 213 kgLength: 3.77 mSpeed:Up to 5 ktEndurance: 26 hours at 3 kt with side scan sonar
15Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:41 PM Page 15

Diving depth:200 m Payload: payload section includes interfacespecification for customer-integrationof payload. Standard payloads include sidescan sonar, synthetic aperture sonar etc.Propulsion: 3 x 1.5 kWh lithium polymerbattery packs, gimballed ducted thrusterNotes: Highly modular autonomousunderwater vehicle with the ability to carrymultiple payloads simultaneously. Canaccommodate new payloads and enhancedenergy sections. Applications include:MCM and UXO disposal, inshore survey,search and salvage, oceanography,scientific research.
Bluefin 21Weight: 750 kg (dry)Length: 4.93 mSpeed: Up to 4.5 ktEndurance: 25 hours at 3 kt with standardpayloadDiving depth:4,500 mPayload: EdgeTech 2200-M 120/410 kHzside scan sonar (option: EdgeTech 230/850
kHz dynamically focused), EdgeTech DW-216 sub-bottom profiler, Reson 7125 400kHz multi-beam echo sounder are standardpayloads, others are availablePropulsion: 9 x 1.5 kWh lithium polymerbattery packs, gimballed ducted thrusterNotes: Highly modular autonomousunderwater vehicle able to carry multiplesensors and payloads at once. Small size, A-
frame or docking head launch and recoveryallow it to take advantage of ships ofopportunity. Missions include MCM, UXOdisposal, offshore survey, search andsalvage, oceanography, archaeology andexploration.
HAUVWeight: 79 kg dryLength: 1.07 mSpeed: up to 0.5 kt (1.5 kt optional)Endurance: up to 3 hours with standardpayload in zero currentPayload: Sound Metrics 1.8 MHz imagingsonar as standard
Propulsion: 1 x 1.5 kWh lithium polymerbattery pack, 5 propulsion/control thrustersNotes: Portable hovering AUV for tasksincluding ship hull and infrastructureinspection, port and harbour security, MCMand UXO disposal, scientific research.
ProteusWeight: 2,182 kgLength: 6.614 mNotes: Large dual mode undersea vehicleconcept, capable of operation in eithermanned or autonomous modes. Proteuswill incorporate Bluefin’s autonomy
technology for use in unmanned missions,and Bluefin’s mission planning capabilitiesand power solution. The Columbia Group isdeveloping the hull mechanical andelectrical systems, Battelle battery chargingand systems integration support.
Spray GliderWeight: 52 kg (dry)Length: 2.13 mSpeed: 19 to 35 cm/sec variableEndurance/range: up to six months/4,800km with standard payloadDiving depth: 1,500 m
Payload: Sea-Bird conductivity-temperature-depth (CTD), dissolvedoxygen (optional), fluorometer (optional),turbidity/OBS (optional), altimeter(optional)Propulsion: 17.5 MJ of energy in lithiumprimary batteries, buoyancy change pumpNotes: Spray collects water column dataprofiles using a pumped, conductivity,temperature and depth (CTD) sensor andother instruments. Applications includeoceanography, environmental protectionand monitoring, scientific research.
Boeing
AN/BLQ-11Weight: 1,244 kgLength: 6 mEndurance: 60 hours (nominal load)Diving depth: 1,000 mPayload: Minehunting sonar and other sensors
Notes: AN/BLQ-11 is the US Navy’s 21-inch(53 cm) diameter Long-term MineReconnaissance System (LMRS) that can belaunched from and recovered into asubmarine’s torpedo tube. It is designed to
16 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:41 PM Page 16

be launched, torpedo-style, fromLosAngeles class submarines to survey, detectandgather data formore than12hours.
EchoRangerWeight: 5,308 kg Length: 5.5 m Speed: 8 ktmax Endurance/range: 28 hours withnormal load/80 miles submerged or up to 70days “with the right power source”according to Boeing Diving depth: 3,050 mPayload:A wide variety of payloadshavebeen installed, including acoustic and
radioactivity sensors, imaging sonars Notes:Built for the oil and gas industry in 2001, Echo Ranger remains in service as a research, development andscientific vehicle.
Boston Engineering Corporation
BIOSwimmerExperimental tethered UUV that mimicsfish swimming action, specifically a tuna,
for precise positioning and navigation in tight spaces in missions such as ship hull, pier and other submergedinfrastructure inspection.
Central Mechanical EngineeringResearch Institute (CMRI) India
AUV-150Weight: 490 kgLength: 4.8 mSpeed: 4 kt maxEndurance: up to 6 hoursDiving depths: 150 mPayload: conductivity, temperature anddepth sensor and side scan sonar, navigation
sensors include GPS, INS, DVL, altimeterPropulsion: Lithium polymer battery,driving vectoring ducted thruster systemNotes: Work class AUV developed forseabed mapping, oceanography, MCM etc.
DARPA
ASW Continuous Trail Unmanned Vessel (ACTUV)The ACTUV programme is intended torobustly track quiet diesel electricsubmarines. The programme is intended toexplore the performance potential of asurface platform that a human is neverintended board at any point in its operatingcycle. The result is a design with reduced
constraints on conventional navalarchitecture elements such as layout,accessibility, crew support systems, andreserve buoyancy. The objective is togenerate a vessel design that exceeds state-of-the art platform performance to providepropulsive overmatch against diesel electricsubmarines at a fraction of their size and cost.
Distributed Agile Submarine Hunting (DASH)The DASH programme is intended to turnthe tables on modern conventionallypowered threat submarines through thedevelopment of advanced stand-off sensingfrom unmanned systems. Satellite-like“subtulite” sonar nodes will operate atsignificant depths in open ocean areas todetect submarines overhead, takingadvantage of low noise at extreme depths.Distributed mobile sensors will exploit non-acoustic techniques from above on
continental shelves. They key prototypesystems are the Transformational ReliableAcoustic Path System (TRAPS) fixed passivesonar node and the Submarine Hold at RisK(SHARK) UUV, an active sonar platform totrack submarines after initial detections.
HydraHydra aims to develop a distributedundersea network of unmanned payloadsand platforms to complement mannedvessels. The system would innovativelyintegrate existing and emerging
technologies to deliver various capabilitiesabove, on and below the ocean’s surface. Byseparating capabilities from the traditionalplatforms that deliver them, Hydra wouldserve as a force multiplier, enabling faster,scalable and more cost-effective deploymentof assets wherever needed. Payloads includeISR and MCM. Each payload module wouldplug into a standardized enclosure thatwould securely transport, house and launchthem, while sustaining functionality forweeks to months.
DGA/DCNS/Thales/ECA/DGA
EspadonWeight: 25 tonnesLength: 17 mPayload: Towed sonar array, minecountermeasures systems includingsmaller UUV/AUV systems such as ECA’sAlister family
Notes: Optionally manned catamarandesigned as a mother ship for a range ofunmanned systems for mine
17Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:41 PM Page 17

countermeasures.DevelopedbyDCNS,ECAandThales under contract to theDGAfor theFrenchNavy’s SystemdeLutteAnti-MinesFutur (SLAMF)programme.
ECA Robotics
Alister 9Weight: 50 to 90 kg in air depending onconfigurationLength: 1.7 to 2.5 m depending onconfigurationSpeed: 2 to 3 ktEndurance: 24 hours at normal speed
Diving depth: 100 to 200 m with greaterdepths optionalPayload: side scan, interferometric, obstacleavoidance sonars, multi-beam echosounder, CTD probe, video camera andsearch lightsNotes: Portable AUV designed for confinedarea inspection, rapid area assessment,homeland security, MCM, seabed andhydrographic survey. Can be launched andrecovered from RHIBs.
Alister 18 TwinWeight: 490 to 620 kg in airLength: 2.6 to 3.3 m depending onconfigurationSpeed: up to 5 ktEndurance: 15 hours depending on
configuration and mission profileDiving depth: 300 or 600 m, deeper onrequestPayload:Obstacle avoidance and optionalside scan, synthetic aperture orinterferometric sonars, multi-beam echosounder, CTD probe, acoustic camera,video camera and searchlights
Notes: Twin body AUV designed forharbour protection, mine identification,maritime structure inspection,hydrographic and littoral surveys.Inspection accuracy improved bystereoscopic cameras, hovering capability,manoeuvrability.
Alister 18Weight:290 to 440 kg depending onconfigurationLength: 3.5 to 4.6 m depending onconfigurationSpeed: 3 kt
Endurance: 24 hours at nominal speedDiving depth: 600 m standard, deeper onrequestPayload: Side scan, synthetic aperture,interferometric and obstacle avoidancesonars, multi-beam echo sounder, CTDprobe, video cameraNotes: AUV designed for homelandsecurity, MCM, rapid environmentalassessment, hydrographic survey missionsand operation from non-dedicated ships.
Alister 27Weight:800 to 1,000 kg in air depending onconfigurationLength: 5 m Speed: 3 ktEndurance: 30 hours at normal speedPayload: side scan, synthetic aperture,interferometric and obstacle avoidancesonars, multi-beam echo sounder, sub-bottom profiler, CTD probe, cameras and lights
Notes: Large, multi-sensor AUV designedfor a wide range of missions includingMCM, covert ISR, rapid environmentalassessment, homeland security, sedimentanalysis, seismic survey, hydrographicsurvey.
K-STERWeight: 50 kgLength: 1.5 m Speed: more than 6 ktEndurance/range: more than 1 kmDiving depth:300 m (600 m + versionoptional)Payload: Shaped charge insensitiveexplosive mounted in tiltable head for highattack accuracy, colour video camera,variable high frequency sonar, searchlight
Propulsion:Battery electric system with 2horizontal and 2 vertical thrustersNotes:One-shot mine killing ROV withautomatic guidance designed for operationfrom non-dedicated platforms. Destroysmoored, bottom, partly buried mines.
Sea ScanWeight: 50 kg in air Length: 1.5 m Speed: 0 to6 kt Endurance: 2 hours max Payload:Rotary payload carrier tilts through 180 deg,day night colour video camera, variable highintensity LED searchlights, high-resolution
imaging sonar (BlueView P900/130) ormulti-beam profiling sonar (such asBlueView MB1350), chemical and turbiditysensors, magnetometer Propulsion: Batteryelectric with 2 horizontal and 2 vertical
18 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:42 PM Page 18

thrustersNotes: InspectionROVusingK-STERrelatedplatformdesigned for fast,accurate inspectionof the sea floor andimmersed structures in salt and freshwater,stable in strongcurrents.Defence/securityapplications includehull andpier inspectionfor anti-smuggling/piracymissions.
Roving BatWeight: 135 kg in airLength: 1.105 mSpeed:2 kt in “flying” mode, 0-19metres/minute in “crawling” modeEndurance: Unlimited (externally poweredvia umbilical)
Diving depth: 100 mPayload: Zoom colour TV camera underdome, wide-angle black and white TVcamera, two 150 W lightsPropulsion: Remote electrical supply drivessix thrusters and two tracksNotes: Crawling and swimming ROV forinspection of ship hulls and submergedstructures, can be configured with othersensors and effectors for detecting andneutralising suspicious devices.
OlisterWeight: 600 kg in air as standard includingsonar or mine disposal charge Length: 3.1 mSpeed: more than 6 kt depending on range,depth and configuration Endurance:unlimited in MIDS mode powered by shipthrough umbilical, up to 2 hours onbatteries in FDS mode. Payload:NATO disposal charge,manipulator, sonar, B&W or colour video camera
Propulsion: Umbilical and/or batteriespowering 4 horizontal and 2 verticalthrustersNotes: MCM ROV/AUV that performsForward Detection Sonar (FDS) missionsahead of the ship includingdetection andclassification of moored mines, seabedsurvey, and Mine Identification andDisposal System (MIDS) tasks includingrelocation, identification and destruction ofground and moored mines, mid-water orseabed inspection.
PAP Mk5Weight: 890 kg in air with NATO chargeLength: 3.16 mEndurance/range: unlimited powered byship through umbilical/2,000 m maxhorizontal operating range
Diving depth: 300 mPayload: Sonar or camera for detection andidentification, 120 kg NATO minedestruction charge Propulsion: Umbilical, electric motors,thrustersNotes: ROV for identification anddestruction of bottom-laid and tetheredmines. More than 500 are in service with 20navies, according to ECA.
Inspector Mk1Weight:2,100 kg fully loadedLength: 7.1 mSpeed: up to 35 kt or 25 kt with towedsecondary targetEndurance: more than 15 hours at 20 kt/ 10nm under remote controlPayload: expendable towed target, 360
degree day/night video camera system,other electro-optical and CBRN sensorsPropulsion: 250 hp inboard turbodiesel,propellerNotes: Target USV based on RHIB capableof remotely controlled and fullyautonomous operation in sea states up to 3.
Inspector Mk2Weight: up to 4,700 kg Length: 8.4 mSpeed: 0-25 kt with station keeping abilityEndurance: 20 hours at 6 ktPayload: Up to 1,000 kg, rotary bow arm candeploy a variety of sensors.
Propulsion: 2 x 170 kW or 215 kW dieselsdriving water jetsNotes: Imagery and bathymetric survey USV.Mission oriented sensors include a multi-beam echo sounder, sub-bottom profiler,side scan sonar, magnetometer. Dataacquisition and post processing capabilitiesinclude sediment analysis, bathymetry,magnetic mapping and imagery.
Elbit Systems
Silver MarlinWeight: up to 6,500 kgLength: 10.67 mSpeed: 45 ktEndurance/range: 24 hours/500 nmPayload: 2,500 kg, COMPASS multi-sensorEO turret with CCD TV camera, mid-wave
thermal imager, laser aiming, range finding,designation and target illuminators, remoteweapon station with 7.62 mm machine gunand fire control system.Propulsion: 2 x 315 hp diesel enginesdriving propellersNotes: USV designed for ISR, forceprotection, anti-terror, anti-surface warfare,MCM, SAR, EW, port and waterway patrol missions. Autonomy includesobstacle avoidance.
19Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:42 PM Page 19

StingrayLength: 3.2 mSpeed:45 ktEndurance: 8 hoursPayload: 250 kg
Propulsion: Piston engine driving water jetNotes: Jet-ski-based USV offered for ISR,force protection/anti-terror, offshoreinfrastructure security, battle damageassessment and other littoral missions.
Gavia (Teledyne)
Gavia DefenceWeight: 49 kg in air for base vehicle, 62 kg intypical MCM configurationLength: 1.8 m for base vehicle, 2.6 m intypical MCM configurationSpeed:more than 5.5 kt
Endurance: 6 to 7 hours at 3 kt with onebattery module, 12 to 14 hours with twoDiving depth:500 or 1,000 mPayload: Options include swath bathymetrymodule, sub-bottom profiling module,sonar training module, custom payloadmodules for user supplied instrumentationPropulsion: Electric motor powered byrechargeable, field swappable batterymodulesNotes: Self-contained, man portable,modular platform capable of operatingfrom vessels of opportunity or from theshore in MCM, ASW, sonar training, rapidenvironmental assessment. ISR, search andrecovery missions.
Gaymarine
Plutino MikiWeight: 55 to 90 kg depending onconfigurationSpeed: up to 6 kt depending onconfigurationEndurance: unlimited, powered from shipvia umbilicalDiving depth: 300 m
Payload: up to 15 kg: 3 sonars includinghigh frequency identification sonar fortarget recognition in zero visibility, 2 TVcamerasPropulsion: 2 x horizontal and 1 x verticalelectric motorNotes: Low cost expendable or trainingROV designed for easy handling, relativelyhigh speed and payload capacity, fullycompatible with Pluto ROV familyconsoles. Can be configured as an AUV.
PlutoWeight:160 kg in airSpeed: 4 kt depending on configuration Endurance: unlimited, poweredby ship viaumbilical
Diving depth: 300 to 1,000 mPayload: 45 kg including 1 sonar, 1 TVcamera and 1 stills camera, spotlightsPropulsion: Electric motors powering 2horizontal, 2 vertical, 1 lateral thrustersNotes: Inspection and payload deliveryROV optimised for “extreme”manoeuvrability and positioningcapabilities, full tilt capability for all sensors.Can be configured as an AUV.
Pluto PlusWeight: 315 kgSpeed: 6 ktEndurance: unlimited, powered by ship viaumbilical ?Diving depth: 300 m (others on request)Payload: 100 kg in air, 3 sonars includinghigh frequency sonar for target recognitionin zero visibility, 1 TV camera, optionallong-range sonar on request
Propulsion: 2 horizontal, 2 vertical and 1lateral thrustersNotes: Inspection and MCM ROV designedfor “excellent” manoeuvrability andpositioning, offers full pan and tilt on allsensors. Can be configured as an AUV.
Pluto GigasWeight: 600 kg in airSpeed: more than 7 ktEndurance: unlimited, powered by ship viaumbilicalDiving depth: 600 m (others on request)
Payload: 100 kg, 4 sonars, including highfrequency target recognition sonar andintegrated long-range sonar, and 1 TVcamera, spotlightPropulsion: 4 horizontal, 2 vertical and 2lateral thrustersNotes: ROV for use in extreme conditions,can operate from ships lacking specialisedsonar, offers “excellent” manoeuvring andpositioning, full pan and tilt for sensors.Can be configured as an AUV.
BatWeight: 650 kgSpeed: 0 to 18 ktDiving depth: 300 m (others on request)Payload: 100 kg in air, 3 sonars, TV camera,torpedo pinger finderPropulsion: 4 horizontal, 2 vertical and 2lateral thrusters
20 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:42 PM Page 20

Notes: Reusable target for exercising sonarsand torpedoes that can also serve in MCMand inspection roles. Speed realistic asconventional submarines typically operatedat under 4 kt. Operator can changeparameters in real time.
General Dynamics Robotic Systems
DracoWeight: 7,700 kg without payloadLength: 12.2 mSpeed: 30 to 35 ktEndurance: 24 to 48 hours
Payload: 2,276 kg, 726 kg tow at 20 kt goal,ASW sensor systems including dippingsonar, active source, towed array. Likelypayloads include a torpedo launcher.Propulsion: 2 x Yanmar 6LY3A-STP enginesdriving Rolls Royce Kamewa water jetsNotes: Anti-submarine warfare USV forLittoral Combat Ship. Designedspecifically to address ASW mission needs,Draco possesses margin through carefuldesign selections enabling it to meet theneeds of many mine and surface warfaremissions, says GDRS.
USV capabilitiesGDRS is developing a wide range of USVsfor the US Navy. Capabilities underdevelopment include: sensor-basedsituational awareness, dynamic routeplanning, harbour and sea navigation,docking, and evasive manoeuvres.They are
also to be capable of dynamicreconfiguration and management ofsystems and resources. Likely missionsinclude: persistent ISR (radar, EO/IR,SIGINT, CBN), port & border security,special ops support, SAR, communicationsrelay, maritime protection: anti-submarine,sea skimmingmissiles, small boat IED,track and trail, ice patrol.
Global Teknik
GlobidaWeight:300 kgLength:3.95 mSpeed: 30 ktEndurance: 10 hoursPayload:Radar, sonar, day/night electro-opticsPropulsion:Gasoline engine driving water jet
Notes:Ship- or shore-launched USV capableof autonomous or manual control.Developed with Turkey’s TUBITAKscientific and technological research council.
IAI
KatanaLength:12 mSpeed: 60 ktEndurance/range: 350 nm
Payload: payloads including electro-optical, communication systems, radio(line of sight or non line of sight), radar andweapon systemsPropulsion: 2 x 560 hp dieselsNotes:New optionally manned USV forhomeland security missions and theprotection of exclusive economic zones,including harbour security, patrol ofshallow coastal and territorial waters,surface and electronic warfare and offshoreplatform protection.
iRobot
1KA SeagliderEndurance: 7 to 9 months/3,800 kmDiving depth: 50 to 1,000 mPayload: 4 kg, conductivity, temperatureand depth measurement and otheroceanographic sensorsPropulsion: Electrically driven hydraulic
buoyancy change pumpNotes: Very long endurance buoyancydriven glider for oceanographic, ISR andharbour defence applications.
International Submarine Engineering
Dolphin Mk 1Weight: 2,832 kgLength: 7.3 mSpeed: 12 kt continuous with 3 kt reserve forstation keeping
Endurance: 26 hours at 12 ktPayload: Minehunting sensors include theKlein 5500 single beam side scan sonar, theAN/AQS 14 side scan sonar and the Reson8101 Seabat. Other sonar options includeAQS 14, AQS 20, TSM 2054 and ISE Aurora Propulsion: 1 x 150 hp Sabre turbochargedmarine diesel, snorkel fedNotes: Semi-submersible minehunting andhydrographic AUV developed from 1981for Canadian Hydrographic Service andfirst ordered by the US Navy in 1985. Haslogged more than 8000 hours in operation.
DoradoWeight: 5,900 kg (fuelled)Length: 8.23 mSpeed: 16 kt max without tow, 12 kt with towEndurance: 12 hours at 200m depth withtow, 28 hours withoutPayload: 210 kg, options include ISE Auroratowfish, MB side scan sonar
21Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:42 PM Page 21

Propulsion: 1 x 315 kW Caterpillar 3126turbocharged snorkelling marine diesel Notes: Semi-submersible minehuntingvehicle in service with the Canadian Navy
ExplorerWeight: 640 to 1,850 kgLength: 4.5 to 6.0 mSpeed:0.5 to 2.5 m/secEndurance/range: 24 to 85 hours/120 to 450 km
Diving depth: Systems rated at 300, 1,000,3,000, 5,000 and 6,000 mPayload: CTD, side scan sonar, sub-bottomprofiler, multi-beamecho sounder typicalPropulsion: 1.6 kWh lithium ion batterymodules driving electric propulsorNotes: Modular vehicle comprising of aforward free-flooding section, full diameterpressure hull and a free flooding aft section.
Arctic ExplorerWeight: 2,200 kg dry Length: 7.4 m Speed:0.5 to 2.5 m/sec, 1.5 m/sec typical cruiseEndurance/range: 80 hours/450 km Divingdepth: 5,000 m Payload: Knudsen 118 kHz
single-beam echo sounder, Seabird FastCatCTD, Kongsberg Simrad 200 kHz, EM2000multi-beam echo sounderPropulsion: Exide Technologiesrechargeable lithium ion batteriesNotes: Arctic Explorer is a derivative ofExplorer. ISE has built two Arctic Explorersfor Natural Resources Canada to map thesea floor underneath the Arctic ice shelf insupport of Canada’s claim under Article 76of the United Nations Convention on theLaw of the Sea.
TrailblazerWeight: 700 kgLength: 2.5 mSpeed: 6 kt coaxial velocityEndurance: Unlimited - powered from shipthrough 900 m umbilical
Payload: 4 x 22 kg mine disposal charges,sonar, camera systemsPropulsion: 25, 30 and 50 hp motors,thrustersNotes: Lightweight, highly manoeuvrableROV developed for MCM missions. Fits 6m ISO container, launched and recoveredby A frame or cranes. In service withCanadian Navy.
Kockums AB
PirayaWeight:400 kg full load displacementLength:4 mSpeed:more than 20 kt Endurance/range:more than 60 nm
Payload: 100 kg, can include TV and IRcameras, radar, communication relays,CBRN sensors, loudspeakers, small armsPropulsion: Outboard engineNotes: Test and experimental USV platformfor coastal patrol use by navies, police forcesand coast guards. Group autonomy systemintended to enable one operator to control agroup of vehicles.
Kongsberg Maritime
MuninWeight: less than 300 kg in airLength: 3 or 4 m depending onconfigurationSpeed: 4.5 kt maxEndurance: 12 to 24 hoursDiving Depth: 1,500 m standard, 600 m optional
Payload: Tailored EM 2040 multi-beamecho sounder, EdgeTech side scan sonar,NBOS CT sensor, terrain following andcollision avoidance sonar, EdgeTech sub-bottom profiler, optional still image cameraPropulsion: internal 5 kWh standard,exchangeable 5 kWh lithium ion battery modulesNotes: AUV capable of running severalpayload modules simultaneously includingside scan sonar, multi-beam echo sounder,sub-bottom profiler and camera together.
HuginWeight: 1,200 to 1,900 kg in airLength: 5.4 to 7 m depending onconfigurationSpeed: 2 to 6 ktEndurance: 24 to 74 hours with all sensorsoperating Diving depth: 1,000, 3,000 or 4,500 m
Payload: HISAS 1030 interferometric SAS,EM 2040 multi-beam echo sounder,EdgeTech side scan sonar, EdgeTech sub-bottom profiler, SAIV CTD sensor, stillscamera, terrain following/collisionavoidance sonar, chemical sniffers,turbidity sensorPropulsion: lithium polymer battery, 1 or 2exchangeable 24 kWh power packsNotes: Large AUV designed for seabedmapping, pipeline inspection and minereconnaissance, precise navigation and highresolution sensors emphasised.
22 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:42 PM Page 22

SeagliderWeight: 52 kg dryLength: 1.8 to 2 m depending onconfigurationSpeed: 0.5 kt (25 cm/sec)Endurance: up to 10 months depending onconfiguration, sampling rate andoperational areaPayload: current profilers, CTD sensors,WET Labs backscatter/fluormeter, dissolvedoxygen sensors, Photosynthetically ActiveRadiation (PAR) sensorPropulsion: Lithium sulfuryl chlorideprimary batteries 24V and 10V packs, 17 MJNotes: Glider AUV developed forcontinuous long-term measurement ofoceanographic parameters. Vehicle iscontrolled remotely via internet andsatellite link.
Hydroid Remus 100Weight: 37 kg in airLength: 1.6 m Speed: 5 kt maxEndurance: 22 hours at optimum speed of 3 kt
Diving depth: 100 mPayload: acoustic Doppler current profiling,side scan sonar, CTD, bathymetry, soundspeed, oxygen optode pH, oxygen reductionpotential sensorsPropulsion: Direct dive DC brushless motorto open 3-bladed propellerNotes: Lightweight AUV designed forcoastal marine research, hydrographic,offshore/energy and defence applicationsincluding MCM, harbour security,environmental survey, search and salvage.
Hydroid Remus 600Weight: 240 kgLength: 3.25 m, varies with configurationSpeed: up to 4 ktEndurance: 24 hours typical
Diving depth: 600 m, 1,500 m optionPayload: Standard sensors include acousticDoppler current profiling, pressure,conductivity and temperature, depth.Options include dual frequency side scansonar, synthetic aperture sonar, ECOsensors, video camera, acoustic imaging,video camera, electronic stills camera,single frequency side scan sonar, sub-bottom profiler. Propulsion: direct drive DC brushlessmotor to open two bladed propellerNotes: Naval missions include hydrographicsurvey, MCM, harbour security, search andsalvage, debris field mapping.
Hydroid Remus 6000Weight: 862 kg in air Length: 3.84 mSpeed: up to 5 mEndurance:22 hours typical subject tospeed and sensor configurationDiving depth: 25 to 6,000 m (4,000 and6,000 m versions available)Payload: Standard sensors include acousticDoppler current profiler, side scan sonar,CTD; options include dual frequency sidescan sonar, flourometers, acoustic imaging,video camera, electronic still camera with
strobe light, sub-bottom profilerPropulsion: 11 kWh Li-ion battery pack,direct drive DC motor, 2 bladed propellerNotes: AUV designed for littoral to deep operations using same interface asRemus 100.
Liquid Robotics
Wave Glider SV2Weight:90 kgLength:2.1 m (float), 1.91 m (subsurfaceunit)Speed: 0.5 to 1.6 ktEndurance:designed to operate for years atsea with regular maintenancePayload: 18 kg, basic payload includes water
speed sensor, AIS receiver, radar reflector,light and flag, 2 sensor modules in floatPropulsion:Mechanical conversion of waveenergy into thrust, 665 Wh rechargeable Li-ion battery pack, 112 W solar arrayNotes: Hybrid wave and solar-poweredUSV optimized for individual or smallgroup deployments carrying preconfiguredsuites of sensors for specific science andsecurity missions.
Wave Glider SV3Weight: 122 kgLength:2.9 m (float), 1.9 m (subsurface unit)Speed:1.5 to 2.3 kt with auxiliary thruster, 1to 2 kt without
Endurance: Operates for years with regularmaintenancePayload:45 kg in float, basic sensors includewater speed sensor, AIS receiver, Aimar200WX weather station, wave data, radarreflector, light and flag. Adaptive ModularPower System is designed to accommodatepower hungry payloads such as sonar.Propulsion: conversion of wave energy intothrust, auxiliary electric thruster, 170 Wsolar array, up to 7.8 kWh of rechargeableLi-ion battery powerNotes: Wave and solar powered USVdesigned to travel tens of thousands of milescollecting real time data in demandingconditions.
Lockheed Martin
MarlinWeight: 954 kgLength: 3.05 mSpeed:4 kt max
23Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:43 PM Page 23

Endurance: 12 to 24 hours depending on missionDiving depth:300 mPayload: 114 kg including 3D imagingsonar, HD video camera, forward lookingsonar, multi-beamecho sounder, HID light,on board mission data recordingPropulsion:2 horizontal and 2 verticalthrustersNotes:Sub sea infrastructure inspectionAUV with advanced sensors, software andnavigation capability. Autonomycomponents include vehicle control,perception and response.
Remote Minehunting SystemWeight: 5,828 kgLength: 7.01 m Speed:16 kt transit, - to 12 kt search
Endurance/range: 24 hours/operates at longover-the-horizon rangesPayload:Bow mounted SeaBat 6012 sonar,AN/AQS-20A towed variable depthminehunting sonar detects, classifies,localises and identifies bottom and mooredmines in littoral regionsPropulsion:1 x 370 hp Cummins 370BturbodieselNotes: Semi-submersible snorkellingRemote Minehunting System uses RemoteMulti-Mission Vehicle and AN/AQS-20Asonar as the mainstay of minereconnaissance capability in the Navy’sLittoral Combat Ship MCM package.
Maritime Robotics AS
MarinerWeight: 1,700 kgLength: 5.6 mSpeed: more than 30 ktEndurance:more than 50 hours at 5 ktPayload: EO/IR camera, radar, CTD, ADCP,HPR systems, echo sounder (single ormulti-beam), sonars typicalPropulsion:Volvo Penta D3 marine diesel,Hamilton 241 water jet, bow thrusterNotes: Multi-purposeUSV with hull and
superstructure made of polyethylene andbased on PolarCirkel work boat,“unsinkable” and almost maintenance free.Offers manual and automatic control,dynamic positioning, formation control.
Meggitt Training Systems
BarracudaWeight: 2,074 kg Length: 7.24 m Speed: 36kt in sea state 3 Endurance/range: 4hours/180 nm at 36 kt, 10 hours/300nm at20 kt Payload: 227 kg at 35 kt, 1,361 kgbollard pull at 17 kt, passive/active radar
augmentation, visual augmentation,scanning projectile impact evaluationsystem, automatic winch Propulsion: 1 x225 hp Volvo D4 marine turbodiesel Notes:Barracuda Unmanned Surface Vehicle –Target is based on a modified, navystandard, glass fibreRHIB. Allows forremote control from distances greater than10 nautical miles or can be configured forover-the-horizon control.
HammerheadWeight: 900 kgLength: 5.2 m Speed: 35 kt in sea state 3, faster in sea state 2Endurance: 12 hours at 10 kt, 8 hours at 20kt, 5 hours at 30 ktPayload: passive/active radaraugmentation, video TM, visualaugmentation, Doppler radar miss distanceindicationPropulsion: 135 hp MerCruiser 3.0l
gasoline engine with MerCruiser Alpha 1 driveNotes: USV target with surface effect hulldesigned to mimic a fast inshore attackcraft in swarms of up to 50 vehicles.Replicates high-speed naval tacticsincluding crossing patterns, zigzags andother evasive manoeuvres.
M Ship
Stiletto MOCWeight: 127 tonnesLength: 26.82 m Speed: up to 52 kt sprint, 26 kt cruiseEndurance/range:high speed range over 1,500 nm
Payload: includes a range of unmannedsystems including 11 m MCM RHIB, VTOLUAV such as Fire Scout, Remus 100 andKingfish UUVs. plus manned specialoperations vehiclesPropulsion:4 x 1,650 hp CAT C30 diesel enginesNotes: Stiletto Maritime Operations Center(MOC) acts as a mother ship for unmannedsystems, delivering critical capabilitiesdown range quickly, significantly reducinghuman risk and time on target.
Mistral/MagnetoWeight: 14,600 kg full load displacementLength: 14.6 mSpeed: more than 30 kt at full loaddisplacementEndurance/range: 900 nm at 20 kt and full loadPayload: 4,082 kg at full load
24 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:43 PM Page 24

Propulsion: 1,006 hpdieselNotes: Optionally manned vessel offeringremote or autonomous control includingcontrol of several unmanned Mistrals fromone manned version. Can handle palletisedcargo, launch and recover other unmannedand towed assets.
Naval Surface Warfare Center (US)
Modular Unmanned Surface Craft LittoralWeight: 38.55 kgLength: 1.83 mX-Class man-portable USV platform forriverine combatant craft support to employas a water-borne “point man” to increasesituational awareness during operations on
inland waterways. It supports NavyExpeditionary Combat Command (NECC)requirements and is capable of carryingdifferent sensors and payloads to provide avariety of capabilities such as intelligence,surveillance, and reconnaissance (ISR) andthreat detection.
Njordworks Inc
PioneerWeight: 7 to 10 kgLength: 1.07 mSpeed: 2.8 ktEndurance: 20 to 60 minutes depending onthrottle usage and payload powerconsumption
Payload: 3 kg, can support a wide range oflightweight TV and IR video cameras, stillscameras, imaging and hydrographic sonars,water quality sensorsPropulsion: 12V/7Ah LiFePO4 batterypowering an airscrewNotes:Small, very shallow draft airboatdesigned to get into confined spaces withdifficult access for a wide variety of missions.
OceanServer Technology Inc
Iver 2Weight: 20.4 to 29.5 kgLength: 1.27 to 1.78 mSpeed: 1 to 4 ktEndurance:8 to 14 hours at 2.5 ktPayload: Wide range of side scan,interferometric co-registered sonars,Dopplervelocity logs, altimeters, bottom
tracking and current profiling sonars,conductivity and temperature sensors, soundvelocity probe, stills and video cameras.Propulsion: 48V servo controlled DC motorwith 3-blade cast bronze propellerNotes: family of low-cost AUVs for avariety of missions in maritimeenvironments including lakes, reservoirs,rivers, and estuaries.
Iver 3Weight: less than 38.55 kgLength: 1.524 to 2.159 mSpeed: 1 to 4 ktEndurance: 8 to 14 hours at 2.5 ktdepending on configurationDiving depth: 100 m
Payload: Sensor options include dualfrequency side scan sonars such as the highdefinition Marine Sonic Sea Scan, L-3 KleinUUV-3500 and EdgeTech 2205, multi-beamsonars such as the Imagenex Delta T, CTand sound velocity sensors.Propulsion: swappable 800-1200 Whrechargeable Li-ion battery pack, driving48V servo controlled DC motor with 3-blade cast bronze propellerNotes: Iver 3 is an “affordable” work classAUV with intuitive mission planner.
Iver 3 NanoWeight: 17.7 kgLength: 1.651 mSpeed: 1 to 4 kt
Endurance: 6 to 10 hours at 2.5 kt surveyspeed depending on conditionsDiving depth: 60 mPayload: Side scan sonar such as TritechStarFish 452 Propulsion: 356 Wh rechargeable Li-ionbattery pack, 36V servo controlled brushlessDC motor with cast bronze propellerNotes: Lightweight AUV designed forimaging missions in coastal waters, targetreacquisition an identification by ROVsand divers.
Office of Naval Research (ONR)
Large Displacement UnmannedUnderwater Vehicle (LDUUV)Endurance: More than 70 daysNotes: LDUUV is a programme to develop apier-launched and recovered UUV (withoutthe need for ship-launch or recovery) withthe capability to transit in the open ocean
and conduct over-the-horizon missions inlittoral waters. LDUUV missions includeIntelligence Preparation of theEnvironment (IPOE), Anti-SubmarineWarfare (ASW), Intelligence, Surveillance and Reconnaissance (ISR), and offensive operations.
RazorLength: 1.676 mEndurance: 6 to 20 hours on 1 to 3 batteriesDiving depth: 100 m
25Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:43 PM Page 25

Payload: 76.2 cm mast with camera, GPS,comms; imaging sonar and subsurfacecamera on tilt mountPropulsion:Up to 3 1.5 kW field replaceabletolerant lithium batteries Notes: Razor UUV can be remotely operatedor autonomous in a variety of harbourdefence missions such as defence againstcombat swimmers, bottom surveys, hull andpier inspections, UUV sentry applications.
XRaySpeed:1 to 3 ktEndurance/range: up to 6 months/1,200 to1,500 kmPayload: Passive sensors including sonar totrack quiet conventionally poweredsubmarinesPropulsion:buoyancy change pump
Notes: Liberdade is a project to develop afamily of underwater gliders for the USNavy’s Persistent Littoral UnderseaSurveillance Network (PLUSNet) system ofsemi-autonomous controlled mobile assets.XRay is the latest prototype, a flying-wing-style glider whose large size is an advantagein terms of hydrodynamic efficiency andspace for energy storage and payload.
ZRAySpan: 6 mEndurance/range: 1 month, 1,000 kmPayload: port leading edge 16 hydrophonearray, starboard leading edge 11hydrophone array, wideband acousticsensors in nose and tailPropulsion: buoyancy change pumpNotes: Large blended wing-body glider
AUV developed with ONR funding by theScripps Institute of Oceanography, theUniversity of Washington’s Applied PhysicsLab and the US Navy Space and NavalWarfare Systems Center Pacific.
Shipboard Autonomous Firefighting RobotSAFFiR is a NavalResearch Laboratoryprogramme todevelop a humanoidautonomous robotcapable of finding andsuppressingshipboard fires andworking seamlesslywith human firefighters. It is a keycomponent of acandidate Innovative
Naval Prototype programme – DamageControl Technologies for the 21st Century.Parallel actuated biped with linearactuators in a bio-inspired geometry and24 degrees of freedom. Capable of omni-directional walking, balancing in sea stateconditions and traversing obstacles,manipulating fire suppressors, use existingthermal shielding equipment, autonomousnavigation of shipboard environment withappropriate sensor suite.
Pennsylvania State University
SeahorseWeight: 4,536 kgLength: 8.69 mSpeed: 4 to 6 kt sustainedEndurance/range: 500 nm at 4 kt cruisePayload: Marine Sonics dual frequency sidescan sonar, Seabird SBE-31 CTD,Paroscientific precision pressure sensor, RDIAcoustic Doppler Current Profiler (ADCP)
Propulsion: 9,126 alkaline batteriesproviding energy for 5 hp Lynx Motionsynchronous electric motor with AdvancedDigital System three-phase inverter drivinga ducted pump jetNotes:Designed to collect high qualityenvironmental data with precision location
in littoral regions. Reliability, ease ofmaintenance and cost effectiveness andoperation from US Navy T-AGS 60 classoceanographic vessels.
Sea MaverickLength: 9.14 m Speed: 15 kt approxsubmerged Diving depth: 1,000 mPropulsion: Electric Notes: Research AUVdesigned and built by the Applied Research
Laboratory at Pennsylvania State Universityin partnership with Key West-based JIATFSouth, the US Navy and Office of theSecretary of Defense Rapid Release ofTechnology Office. Sea Maverick isdesigned to be environmentally friendly,detect and monitor highly mobile objectsand relay that information to multiplerecipients in a timely manner.
Polish Naval Academy in Gydnia/GdanskUniversity of Technology
EdredonWeight: 2,000 kgLength: 5.7 mSpeed:30 kt maxEndurance/range: 8 to 130 hours subject tospeed, sea state and load/up to 20 km
Payload: 1,000 kg, day/night cameras withlaser rangefinder, panoramic camera, sonar,chemical and meteorological sensorsNotes:Experimental USV based on hybridrubber/fabric hulled boat developed forcoastal patrol, port security, environmentalprotection and search and rescue missions.
Qinetiq North America
BlackfishWeight: 470 kg dry, 515 kg wetLength: 3.22 mSpeed:approx 45 kt transit, -4 to 4 kt tracking
26 Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:43 PM Page 26

Endurance: at least 1 hour/1 km fromcontrol antennasPayload: up to 150 kg, pan-tilt-zoom videocamera, high-resolution 2-D sonar,underwater video cameraPropulsion: Battery electricNotes: Maritime force protection USV foroperation in ports and harbours. Optional2D high-resolution sonar and underwatervideo camera enable location, classificationand pursuit of underwater threats such asswimmers and divers.
Sea ScoutLength: 91.44 cm (36 in)Speed: more than 15 ktDiving depth: 200 m Payload:Power and signal connections fortwo separate payload sensors are provided, awide range of payload sensors can beaccommodated. Additionally, the tailsection admits towed payloads.
Propulsion: 230 Wh battery capacity,flooded electric motor driving ductedpropulsorNotes: Lightweight general purpose andanti-submarine warfare UUV designed fordeployment from A-size aircraft sonobuoylaunchers and for hand launch and recoveryfrom small boats.
Rafael
ProtectorWeight: 4,000 kgLength: 9 - 11 mSpeed:at least 38 ktPayload: Radar, Toplite electro-optical
sensor turret, Mini-Typhoon stabilised gunsystem capable of operating a variety ofsmall calibre machine gunsNotes: Protector is a family of small USVswith remote and autonomous operationscapabilities. Plug and play modules enableconfiguration for anti-terror forceprotection, ISR, ASW, ASuW, mine warfareand mine countermeasures, EW,maritime/port security missions.
Saab
AUV 62Weight:600 to 1,500 kg depending onconfigurationLength: 4, 7 or 10 m depending onconfigurationSpeed: 0 to 20 ktDiving depth: around 500 m Payload: sonar that provides better than 4 x4 cm resolution, 2 x 200 m swath width forhigh-resolution or 2 x 400 m rapid areaassessment missions and respective 2.5 or20 km2/hour coverage ratesPropulsion:Rechargeable batteries andducted propulsorNotes: Submarine, ship or shore launchedAUV62-MR is designed to operateautonomously and perform long-termmine reconnaissance missions with highspeed of advance and advancedinformation gathering independently ofdedicated platforms.
Double Eagle MkIIWeight: approx 360 kg in airLength: 2.2 mSpeed: more than 6 kt forward, 0.7 kt lateral,0.4 kt vertical, 6 kt ascent/descentDiving depth: 500 mPayload:Colour CCD camera, sonaroptions include electronic scanning sonaron 0-90° tilting mount to enable placing ofmine disposal charge in zero visibility. Propulsion: Two 5 kW brushless motors.Approx. 2,500 N forward thrust. Six 0.4kW brushless motors.Notes: Mine countermeasures ROVdesigned for operation from MCM vessels,craft of opportunity or the shore. Baseconfigurations are for mine reconnaissance- both remotely controlled and autonomous- and mine disposal.
Double Eagle MkIIIWeight: approx 500 kgLength: 3 m Speed:0 to more than 7 ktPayload: More than 250 kg, mine huntingsonars, mine disposal charge
Propulsion:Four 7 kW (10 hp) brushlessmotors. Approx. 7,500 N forward thrust. Six400W brushless motors.Notes: Mine countermeasures ROVdesigned for operation from MCM vessels,craft of opportunity or the shore. Baseconfigurations are for minereconnaissance - both remotely controlledand autonomous - and mine disposal.
27Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:43 PM Page 27

28 Compendium Naval Robotics 2014
SandiaNational LaboratoriesIntelligent Systems
VolantVolant is a conceptual single unmannedsystemcapable of flying, swimming,driving, andhopping across a variety ofterrains andobstacles conceivedbySandiaNational Laboratories’ Intelligent Systems,
Robotics,&Cybernetics (ISRC)organisation.A simulation shows aUAV-towedglider that lands inwater and shedsitswings to reveal a swimmingAUV,whichin turn sheds flippers tobecomeaUGVthatcrawls up abeach to reconnoitre a shorefacility. Testing shows that the conceptcould soonbe reality, according to ISRC.
Searobotics
Catamaran 11mopenwaterUSVSpeed: 9 kt max, 5 kt averageEndurance:up to 60 days, operates throughsea state 5 for up to 30 daysPayload:Acoustic Doppler Current Profiler(ADCP) in port hull
Propulsion:diesel electric hybridNotes: Delivered to the University of RhodeIsland in 2013 to support the SurveyingCoastal Ocean Autonomous Profile(SCOAP) mission in which it is intended toperform a variety of data acquisition tasks tosupport material transport investigations aswell as multidisciplinary studies for coastaloceanographers.
Catamaran 2.0 - 4.0 collapsible USVLength: 2 to 4 mNotes: A range of compact, collapsiblecatamaran USVs designed to offer all thefeatures of a larger USV in vehicles compact
enough to ship in a pallet crate and simpleenough for assembly on sight fromlightweight parts.
Catamaran 4.0 m general purpose USVLength: 4 mPayload: Vehicle can be outfitted with asurvey-grade echo sounder, side-scansonar, and multi-beam sonar orreconfigured with additional sensors forsurvey-specific requirements.
Notes: Small but capable USV designed fornumerous applications specific designs,highly manoeuvrable, high efficiency hulls.
Catamaran 5.7 m general purpose USVLength: 5.7 mSpeed:more than 5 m/secPayload: 350 kg on substantial payload deckPropulsion: All electric or diesel electric hybridNotes: General purpose USV, an exampleof which was delivered to NATO’s Centerfor Marine Research and Experimentation
(CMRE) in 2013. It will be used to improvepayload capacity and efficiency of the fullyautonomous mine neutralization system.System can ship worldwide in a standard 20 ft container, trailer doubles asa shipping cart.
High Speed USVsLength: 1.5, 5, 7 and 9 mNotes:A family of high speed manned andunmanned surface vessels is offered forsecurity, surveillance, target and testapplications.
Singapore Technologies Electronics Ltd
VenusLength: 9 m and 16 m versions availablePayload:Up to 1.5 tons including ThalesUnderwater Systems towed syntheticaperture sonar, ECA expendable mine
disposal systems, Oto Melara remoteweapon station, dipping sonar for ASWNotes:Modular customisable USV platformfor multiple missions
Swiftships
AnacondaWeight: 11,485 kgLength: 10.7 m Speed:more than 50 ktEndurance/range: more than 200 nm at 35 ktPayload: A wide range of sensors and
Compendium Naval Robotics.qxd:Armada 10/1/14 8:43 PM Page 28

29Compendium Naval Robotics 2014
effectors can be integrated, featuresa bow ramp for cargo or personnel,removable seatingPropulsion: 2 x 560 bhp diesel engines, 2Rolls Royce FF-series water jetsNotes: Armoured riverine/littoral patrolboat being converted in cooperation withthe University of Louisiana at Lafayette forunmanned operations, designed to be fullyoperational in Sea State 2 and survive inSea State 4.
Teledyne Webb Research
G2 Slocum GliderWeight: 54 kgLength: 1.5 m Speed: 0.68 kt averageEndurance/range:4 to 8 months/2,158 to3,238 nm on lithium batteries, 15 to 50days/324 to 809 nm on alkaline batteriesPayload: 6 litre payload bay canaccommodate a wide range of sensorsincluding acoustic bioprobe, acousticDoppler current profiler, acoustic mammaldetector, bathyphotometer, beam
attenuation meter, pumped CTD,hydrophones, optical backscatter, opticalfluorometer,optical attenuationmeter,optical fluorometer, oxygen sensor, PAR,radiometer, algal spectrophotometer,turbulence meter.Propulsion:Electric buoyancy change pumpNotes: Buoyancy driven AUV for oceanresearch and monitoring, creation of soundspeed profiles etc.
Electric GliderWeight: 52 kgLength: 1.5 m Speed: 0.77 kt horizontal averageEndurance/range: 30 days/810 nmdepending on measurement andcommunicationDiving depth: 4 to 200 m, 1,000 m optionavailable
Payload: Flexible payload bay enablesintegration of a range of devices includingConductivity, Temperature and Depth(CTD) sensorsPropulsion:Alkaline battery poweredbuoyancy change pumpNotes: Long endurance buoyancy drivenglider, sawtooth profile progress commonto all gliders optimal for vertical andhorizontal observations in water column.
Thermal GliderWeight: 52 kgLength:1.5 m
Speed: 0.77 kt horizontal averageEndurance/range: 3 to 5 years/40,000 kmprojectedDiving depth: 1,200 mPayload:Conductivity Temperature andDepth (CTD) sensorPropulsion:Buoyancy change pump drivenby environmental thermal engineNotes:Environmentally powered,buoyancy driven glider for long-termenvironmental monitoring. SlocumThermal Glider is comprised of one mainhull section, a solid machined nose dome, awet section located aft in addition to twothermal tubes located below the hull.
Tianjin University
Haiyan (Petrel)Weight: 70 kgLength: 1.8 m Speed: about 0.5 kt probableEndurance/range: 30 days/1,000 kmDiving depth: 1,500 mPayload:5 kg, acoustic and bio-opticalinstruments for oceanographic observation
Propulsion: Electrically powered buoyancychange pumpNotes: Petrel II is China’s first underwaterglider, which passed a 1,500 m deep watertest in the northern part of the South ChinaSea, establishing Chinese range, depth andendurance records and bypassing imposedtechnology restrictions.
Thales
ASEMARStudy for the design of a surveillance-based AUV for maritime securityoperations. This project, signed with theMaritime Cluster initiative in the Frenchregion of Brittany, involves two industrialpartners (Thales and ECA) and foureducational institutions in France. It is part
Compendium Naval Robotics.qxd:Armada 10/1/14 8:44 PM Page 29

30
ARMADA BRAND AD C4
DSEI C2
IMDS C3SAAB 7
I INDEX TO ADVERTISERS
swimming in uncertainwaters
NavalRobotics
ON THE COVER: Naval robots are normallysupposed to swim on the surface or under water. Thisspecimen form Eca adds the supreme sophisticationof turning itself into an underwater land robot as it cancrawl on the seabed thanks to its tracks.
of a series of experiments undertaken inconjunctionwith theNATOUnderseaResearchCenter (NURC) and theDUBM-44 programme for developing high-levelAUVpayloads. Thales is responsible fordeveloping the sonar system, aswell as theautonomous decision-making capabilityand the high-resolution synthetic apertureside-scan sonar.
University of Washington
SeagliderWeight: 52 kg dryLength: 1.8 m Speed: 0.5 kt
Endurance/range: 2,484 nm (650 dives to 1,000 m)Diving depth: 1,000 m Payload: Sea Bird CTD and dissolvedoxygen sensor, WET Labs fluorometer-optical backscatter sensor, variable samplerate by sensor and depth rangePropulsion: Lithiumprimary batteries in24V and 10V packs, 10 MJ total, drivingbuoyancy change pumpNotes:Glider developed for physical,chemical, and biological oceanography,tactical oceanography, maritimereconnaissance, communication gateway,navigation aid applications.
Virginia Tech
CyroWeight: 77.11 kgLength: 1.701 mEndurance: measured in monthsPropulsion: Pulsating propulsion techniquemimics that of jellyfish, powered byrechargeable nickel metal hydride battery
Notes: US Navy funded biomimetic AUV project intended to develop self-powering autonomous robots forsurveillance, environmental monitoring,sea life observation, mapping of oceanfloors and currents.
Compendium Naval RoboticsSupplement to Issue 5/2014Volume 38, Issue No. 5, October-November 2014
INTERNATIONALis published bi-monthly by Media Transasia Ltd.Copyright 2012 by Media Transasia Ltd.Publishing Office: Media Transasia Ltd.,1205 Hollywood Centre, 233 Hollywood Road, Sheung Wan, Hong Kong.Tel: (852) 2815 9111, Fax: (852) 2815 1933
Editor-in-Chief: Eric H. BiassRegular Contributors: Roy Braybrook, Paolo Valpolini, Peter Donaldson, Wesley FoxChairman: J.S. UberoiPresident: Xavier Collaco Sr. Manager International Marketing: Vishal MehtaManager Marketing: Jakhongir Djalmetov Sales &Marketing Coordinator: Atul BaliCreative Director: Bipin KumarAsstt. Art Director: Ajay KumarProduction Manager: Kanda ThanakornwongskulGroup Circulation Manager: Porames ChinwongsChief Financial Officer: Gaurav Kumar
Advertising Sales Offices� AUSTRIA, BENELUX, SWITZERLANDCornelius W. BontjePh: +41 55 216 17 81, [email protected]� FRANCEPromotion et Motivation, Odile OrbecPh: +33 1 41 43 83 00, [email protected]� GERMANYSam Baird Ph: +44 1883 715 697,[email protected]� ITALY, NORDIC COUNTRIESEmanuela Castagnetti-GillbergPh: +46 31 799 9028, [email protected]� SPAINVía Exclusivas, Macarena Fdez. de GradoPh: +34 91 448 76 22, [email protected]� UNITED KINGDOMZena CoupéPh: +44 1923 852537, [email protected]� RUSSIAAlla Butova, NOVO-Media Ltd,Ph: (7 3832) 180 885 Mobile: (7 960) 783 6653 Email: [email protected]� EASTERN USA – EAST OF THE MISSISSIPPI RIVERMargie Brown, Ph: (540) 341 7581,[email protected]� WESTERN USA – WEST OF THE MISSISSIPPI RIVERDiane Obright, Ph: (858) 759 3557,[email protected]� ALL OTHER COUNTRIESVishal Mehta, Tel: (91) 124 4759625, Mob: (91) 99 999 85425 E-Mail: [email protected] Djalmetov, Mobile: (91) 98 995 50162 E-Mail: [email protected]
Annual subscription rates:Europe: CHF 222 (including postage)Rest of the World: USD 222 (including postage)
Controlled circulation: 25,029 (average per issue)certified by ABC Hong Kong, for the period 1st January 2013 to 31st December 2013.
Printed by Media Transasia Thailand Ltd.75/8, 14th Floor, Ocean Tower II,Soi Sukhumvit 19, Sukhumvit Road, Klongtoeynue,Wattana, Bangkok 10110, Thailand.Tel: 66 (0)-2204 2370, Fax: 66 (0)-2204 2390 -1
Subscription Information: Readers should contact the following address: Subscription Department, Media Transasia Ltd., 1205 Hollywood Centre 233 Hollywood Road, Sheung Wan, Hong Kong.Tel: (852) 2815 9111, Fax: (852) 2851 1933
ABC
Compendium Naval Robotics 2014
Compendium Naval Robotics.qxd:Armada 10/1/14 8:57 PM Page 30

Cover Armada Oct 2014.qxp:Armada 10/7/14 4:13 PM Page 1

The Trusted Source For Defence Technology Information Since 1976
38 years of publ ish ing excel lence
THE DEFENCEDECISION-MAKER’S
FIRST-CHOICEREFERENCE
JOURNAL
ARMADAINTERNATIONAL& COMPENDIUM
SERIESOFFERS YOU
INSIGHT &ANALYSIS TOSTAY AHEAD
For advertising, sponsorship& subscription queries contact us
www.armada.ch
THE TRUSTED SOURCE FOR DEFENCE TECHNOLOGY INFORMATION SINCE 1976
Issue 3/2014
June/July
INTERNATIONAL
THE TRUSTED SOURCE FOR DEFENCE TECHNOLOGY INFORMATION SINCE 1976
Issue 3/2012
June/July
INTERNATIONALINTERNATIONAL
INTERNATIONAL: The trusted source for defence technology infor
mation since 1976
ModernSoldierProgrammes
byCompendium
All About Power
Cover Armada Oct 2014.qxp:Armada 10/7/14 4:14 PM Page 1









![ESROCOS DISSEMINATION REPORT · 2019-03-01 · [AD.1] Peraspera: D3.1 Compendium of SRC Activities (for call 1) [AD.2] Guidelines for strategic research cluster on space robotics](https://img.dokumen.tips/doc/110x75/5f4e9928240c5730d30c5ec2/esrocos-dissemination-report-2019-03-01-ad1-peraspera-d31-compendium-of-src.jpg)