Embed Size (px)
Citation preview

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 1/40

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 2/40
2
DE T E T OF PHYSICSUNIV E SI T Y OF SARGODHA

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 3/40
3
DEDICATED TO,
Our respected teacher
SIR ASSAD ABBAS MALIK

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 4/40
4
Acknowledgements
First of all we thank Allah Almighty who provided us opportunity and gave the strength toundertake this work of great importance.
Several persons helped us directly or indirectly in our work. Laraib and Faiza have done thecalculations sensibly. While Sadaf and Sabeen not only typed and edited the manuscript withadmirable competence but always went through the innumerable revision with patience, careand understanding. The responsibility for any remaining errors or shortcomings is, of course,ours.
At the end, we would like to thank our respected teacher, Sir Assad Abbas Malik,
University of Sargodha for his valuable criticism, suggestions comments and he mostwillingly, come forward to review our work and gave very valuable suggestions. Also weespecially wish to thank Professor Khalid Naseer, University of Sargodha for helping us inusing mathematica while making graphs.
Laraib, Faiza, Sabeen and Sadaf.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 5/40
5
CONTENTS
Chapter-1 Classical Simple Harmonic Motion (7-28 )
1-1 Introduction «««.«««««««««««««««««««««««.. 7
1-2 Horizontal Oscillation ««««««««««««««««««««......«. 9
1-2-1 Comparison b/w displacement, velocity and accelerat ion ««««««« .. 15
1-3 Vertical Oscillation ««««««««««««««««««««««..« 15
1-4 SHM In Two Dimensions «««««««««««««««..«««««.. 17
1-5 SHM In Three Dimensions ««««««««««««««..«««««« 20
1-6 Simple Pendulum ««««««««««««««««««««««...«. 21
1-7 Physical Pendulum «««««««««««««..«««««««««« 23
1-8 Spring In Series and Parallel ««««««««««««««««««...« 23
1-8-1-1 Parallel Configuration .............. ............................... .................... . ................. 24
1-8-1-2 Variation In Parallel configurat ion «««««««««« «««««««««.. 25
1-8-2 Series Configuration «.««««««««««««««««................... ..........«.. 26
1-9 Floating Objects «««..«««««««««....««««.««.«««....««... 27
1-10 Tunnel In Earth ««««...«««««««««««««««««...«« 28

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 6/40
6
Chapter-2 Simple Harmonic Motion In Lagrangian (28-36 )
2-1 Introduction «..«««««««««««««««««...««««««« 30
2-2 Horizontal Oscillation««««««««««««««««««...«««... 30
2-3 Vertical Oscillat ion «««««««««.««««««««««««««. 31
2-4 Simple Harmonic Motion in 2- D«««««.«««««««.«««««... 31
2-5 Simple Harmonic Motion In 3- D «««««««««««««««««... 31
2-6 Simple Pendulum «««««««««««««««««««««««.... 32
2-7 Physical Pendulum ««..««..««««««««««««««««««. 33
2-8-1 Parallel configuration ««««««..««««««««««««««.« 34
2-8-2 Series Configuration «««««««.««««««««««««««.. 35
2-9 Floating Objects ««««««««««««««««««««...«««.. 36
2-10 Tunnel in Earth ««««««««««...««««««««««««...« 36
References «««««««««««««««««««««««««««...« 37

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 7/40
7
CLASSICAL SIMPLE HARMONIC MOTION
1-1 Introduction
Our study of physics started with the discussion of bodies at rest. We then consider thesimple case of motion along a straight line. Motion can take any path. Linear motion is theeasiest motion to discuss and we know how equations of motion and Newton's laws of motion can help us to determine velocities, displacements, accelerations, force, inertia, etc.Oscillatory motion is periodic in nature. That is after a regular time interval, the motionrepeats itself. The object returns to the given position after a fixed time interval unlike linear or circular motion, the force responsible for the motion of a body undergoing SimpleHarmonic Motion, varies in magnitude and direction, the variation is also periodic in natureand hence the simple harmonic is also periodic in nature. Let us now try and understandhow SHM occurs and what conditions are necessary for an SHM in real life.
We heard the one about the opera singer breaking glass of water with their voice or it can be the specs worn by the audience too. Later we will discuss the breaking of the glass with aloud speaker but first we will try to work out some rules for the things which vibrate, or
1

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 8/40
8
oscillate. There are many forms of oscillations in the real world- oscillations determine thesound of the musical instrument, the color of rainbow, the ticking the clock, needle of asewing machine goes up and down at a certain regular frequency, a child on a swing in a
park goes back and forth repeatedly and even the temperature of the cup of tea. A classicexample of SHM is the motion of a leaf in a pond. If waves are generated in the pond, the
leaf will bob up and down in a repeated manner. When a bat hits a baseball, the bat mayoscillate enough to stings the batter¶s hands or even to break a part. When wind blows past a
power line, the line may oscillate so severely that it rips apart, shutting off the power supplyto a community. When a train travel around a curve, its wheel oscillate horizontally as theyare forced to turn in new direction (you can hear the oscillation ). A similar example of SHMis a cork bobbing up and down, when placed in a beaker containing water. A mechanicaloscillation is a repeating movement ±an electrical oscillation is a repeating change in voltageand current.
Mechanical oscillations are probably easiest to think about, so it is better to start from there.Let us think about the movement of an object which is moving back and forth over a fixed
range of positions, such as the motion of the swing in the park, or the bouncing up and downof the weight on the end of the spring.
When initially the body is in equilibrium position then forces on it balance. Now let usdisplace it from equilibrium by applying force on it to a distance x, when it is released arestoring force comes into play and returns it to its original position which is zero. Inertia onthe other hand tries to oppose any change in its velocity. The elasticity returns body to itsoriginal position imparting to it an appropriate negative velocity , when body reaches itsequilibrium position again at that point the negative velocity is maximum, which producesnegative displacement. The body overshoots its equilibrium position. The restoring force now
becomes positive (helps increase x ) and it must now overcome inertia of negative velocity.
Consequently velocity keeps on decreasing until it is zero by that time displacement has become large and negative and has become large and negative and process is reversed. This process of restoring force trying to bring x to zero by imparting a velocity and inertia preserving the velocity and making x, to overshoot, repeats itself and that is the way bodyoscillate.
As when we displace a system work has to be done on it .The restoring force F obviouslydepends on work done to give a displacement x. Thus F is some general function of x. For systems oscillating violently (large x) the dependence of F on x is very complex. We willdiscuss only those systems in which moving part always stays close to its mean position(small x).Now we'll define Hook's Law which states that:
Restoring force is directly proportional to the displacement and opposes its increase.
F = í k x (1.1 )
Negative sign indicates that F is opposite to increase in x .The constant of proportionality k
is called the force constant .The SI unit of k is Nm í2 and its magnitude depends upon theelastic properties of the system under study. Equation (1.1 ) is statement of Hook's Law for elastic forces.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 9/40
9
1-2 Horizontal Oscillations
The motion in which the restoring force is proportional to displacement from mean position and opposes its increase is called the simple harmonic motion. This happens whenthe force acting on the body is elastic restoring force or simply we can say return force. We
can define linear oscillator or an oscillator for which the restoring force is proportional todisplacement.
A body of mass m attached to a spring of spring constant k and is free to move over africtionless horizontal surface as shown
Figure1-1: Model for the horizontal periodic motion.
Case 1: When spring is stretched the net force acting on the body will be given below
= + + , (1.2 )
where is net force and is given by , is restoring force is acting alongnegative x-axis an its magnitude is , gravitational force is equal to weight and its
direction is along negative y-axis similarly is given by ). By substituting the valueswe get
, (1.3 )

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 10/40
10
By comparing the components of force and magnitude of components of normal andgravitational force balanced each other so y-component is zero. And force will be only along
x- axis that is equal to and then substituting may be written equal to . The
final result will be
0. (1.4 )
Here, is angular frequency given by .
Case 2: When the spring is compressed then the expression of net force is given by equation(1.2 ). Here the difference will be that the restoring force will act towards the positive x-axisand will tend to take the body towards the mean position substituting the values an then
comparing the components of the force and substituting the values and
we get
(1.5 )
For a linear oscillator , after resolving the proportionality sign we get the constantof proportionality k which is spring constant or stiffness factor. It value depends upon thenature of the spring. It is large for the hard spring and small for soft spring. so using
, and then substituting , we get the equation of simple harmonic oscillator
. (1.6 )
Here, is the angular velocity given by
.
The Physical Statement corresponding to this equation is: The acceleration of the body insimple harmonic motion is proportional (and opposite in sign ) to displacement. In order todetermine that what type of motion is represented by above equation, we need to solve thisdifferential equation i.e. obtain an expression of displacement x as function of time t . Theequation of motion is homogenous second order ordinary differential equation. We can solvethis second order differential equation using trigonometric solution, power series solution andexponential solution. We will discuss only one of them here (differential solution ).
Multiply by on both sides of equation (1.5 ) and by substituting the values =
and , we get
( , (1.7 )
Integrating on both sides and twice and using B and C as constant of integration and thensimplifying we will get

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 11/40
11
, (1.8 )
where C is constant of integration, is the angular velocity and is the displacement. Byapplying the boundary conditions:
, and simplifying we get
). (1.9 )
Above equation can also be written as
). (1.10 )
The smallest time period during which oscillation repeats itself is called time per iod or simply period, is given by
. (1.11 )
From this note that time period does not depend upon amplitude or displacement. If we
change time by then value of remains unchanged .In other words displacement repeats
itself in a time interval of .
The maximum displacement from the mean position is called am plitu d e. Since maximumand minimum values of x are respectively +1 and í1 so the maximum and minimum valuesare respectively and +
(1.12 )
This is possible if ) = 1 or ) =1. The number of vibrations completedin one second is called f req uency given by
(1.13 )
We can get the V el o cit y of the harmonic oscillator by differentiating the displacement,
substituting value of and then differentiating we get the equation for velocity given by
). (1.14 )
Substituting the value of ) we can get a more precise result for the velocity of harmonic oscillator
. (1.15 )

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 12/40
12
For t rel tion of acce l era tion we d ifferen ti te t e d i l emen t twi e and t en pu tting t evalue of we can ge t more préc i ed resu lt for t e acce lera tion of t e
harmon ic osc illator
(1.16
The argumen t of cos ine func tion is ca lled the phase of the mo tion. The cons tant is ca lled the In itial phase. The know ledge of phase cons tant enab les us to f ind ou t how far
from mean pos ition the sys tem was a t time t= e.g. If then
. (1.17
Figure1-2 : Graph of d isp lacemen t versus time per iod for SH M.
0 4 8 12 1 20 241
0
1
time
d i s
l
e m e n

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 13/40
13
Figure 1-3 : Graph of ve locity versus time per iod for SH M.
Figure 1- : Graph of acce lera tion versus time per iod for SH M.
Dur ing s imple harmon ic mo tion the total energy of osc illator rema ins conserved.
As the total energy is the sum of its k inetic energy and the po tential energy. But at mean pos ition the po tential energy is equa l to zero so we are lef t only w ith the k inetic energy andso the total energy a t the mean pos ition is on ly the k inetic energy.Wh ile a t the ex treme
pos ition the k inetic energy of the osc illator is equa l to zero so the total energy w ill be on ly its po tential energy.
The total mechan ica l energy of the harmon ic osc illator a t any instant other then the meanand the ex treme pos ition is par tly k inetic and par tly po tential.
1
0
1
tim e
e
c i t
0 4 8 1 2 1 6 20 241
0
1
tim e
c c e
e r
t i o n

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 14/40
14
Potential energy a t any instant is g iven by U wh ich is g iven by Integra ting and then
subs tituting the va lue of the d isp lacemen t we ge t the re lation for the energy of the harmon icosc illator a t any instan t
U= ]. (1.1
The max imum va lue of the po tential energy var ies w ith time and as
So has max imum va lue of po tential energy w ill be
U= . (1.19
The k inetic energy a t any instan t is given by K.E = , subs tituting the va lue of and
then s implifying the above equa tion we can ge t the prec ised va lue for the max imum va lue of the k inetic energy a t any instan t
K.E max = . (1.2
The total mechan ica l energy a t any instan t will be g iven by add ing the max imum va lue of k inetic and po tential energy a t any instan t
T.E = (1.21
From equa tions (1.19 ,(1.2 and (1.21 we f ind that
P.E max = K.E max =T.E .
Figure 1-5 : Graph of energy for SH M. The bo ld curve represen ts K.E wh ile the do ttedrepresen ts the P.E , where K.E and P.E. are the func tions of pos ition for SH M.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 15/40
15
1-2-1 Compar i on B w n D i placement, Ve locity And Acce lerat ion
1) When d isp lacemen t is max imum ( , the ve locity = , because theosc illator has to re turn and ve locity changes its d irec tion.
2) If d isp lacemen t is max imum acce leration is a lso max imum ( and isdirec ted oppos ite to d isp lacemen t.
3 ) When x = , i.e. when the ve locity is max imum ( andacce lera tion is zero.
Figure 1-6 : Compar ison b /w graph of d isp lacemen t, velocity and acce lera tion versus time per iod.
1-3 Vert ica l Osc illat ions
Suppose we have a spr ing w ith force cons tant k and suspended from it a body w ith a mass m.
Case 1: The body hangs a t res t in equ ili br ium. In this pos ition the spr ing is s tretched to anamoun t just grea t enough that the spr ing's upward ver tical force on the body ba lancesits we ight mg,
(1.22
Case 2: When the body is d isp laced be low the equ ili br ium pos ition, and then s tretched to anamoun t then the total extens ion in the spr ing w ill be and the ne t force w ill be :
= + , (1.23
0 4 8 12 161
0
1
time
d i s p l a
c e m e n

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 16/40
16
Figure 1-7: Model for the vertical periodic motion.
Here, is the net force which is only along -axis and is equal to , is the
restoring force of the spring its magnitude will be equal to and isgravitational force of the earth equal to the weight of the body ( ), by substituting thevalues in the above equation and then solving we will get
, (1.23 )
Here, .
Case 3 : When the spring is compressed and moved upwards then the extension in the stringis . is the restoring force of the spring it is equal to ) and is
gravitational force of the earth equal to the weight of the body ( ), by substituting thevalues in equation(1.23 ) then solving we will get (- ) which then yields
(1.24 )
1-4 Harmonic Oscillator In 2 Dimensions
Consider the motion of the particle of mass m at any point P as shown in the figure movingin accordance with the following equation of motion. Net force can be written as
= , (1.25 )

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 17/40
17
Here, is equal to and similarly can be written as and then we may also write equal to similarly equal to , then
after comparing coefficients of and on both sides we get two equations
Figure 1-8: Motion in 2-D.
+ , (1.26 )
+ , (1.27 )
We know that has the value equal to and has the value . Then the solutions
of equations (1.26 ) and (1.27 ) are respectively given by
. (1.28 )
. (1.29 )
1-5 Harmonic Oscillator In 3 Dimensions
Consider a motion of particle of mass m in space. The net force is given by equation (1.25 ) but here, is equal to and similarly can be written as
and then we may also write equal to similarly equalto and equal to then after comparing coefficients of and on both sideswe get three equations
+ , (1.30 )
+ , (1.31 )
+ , (1.32 )
8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 18/40
18
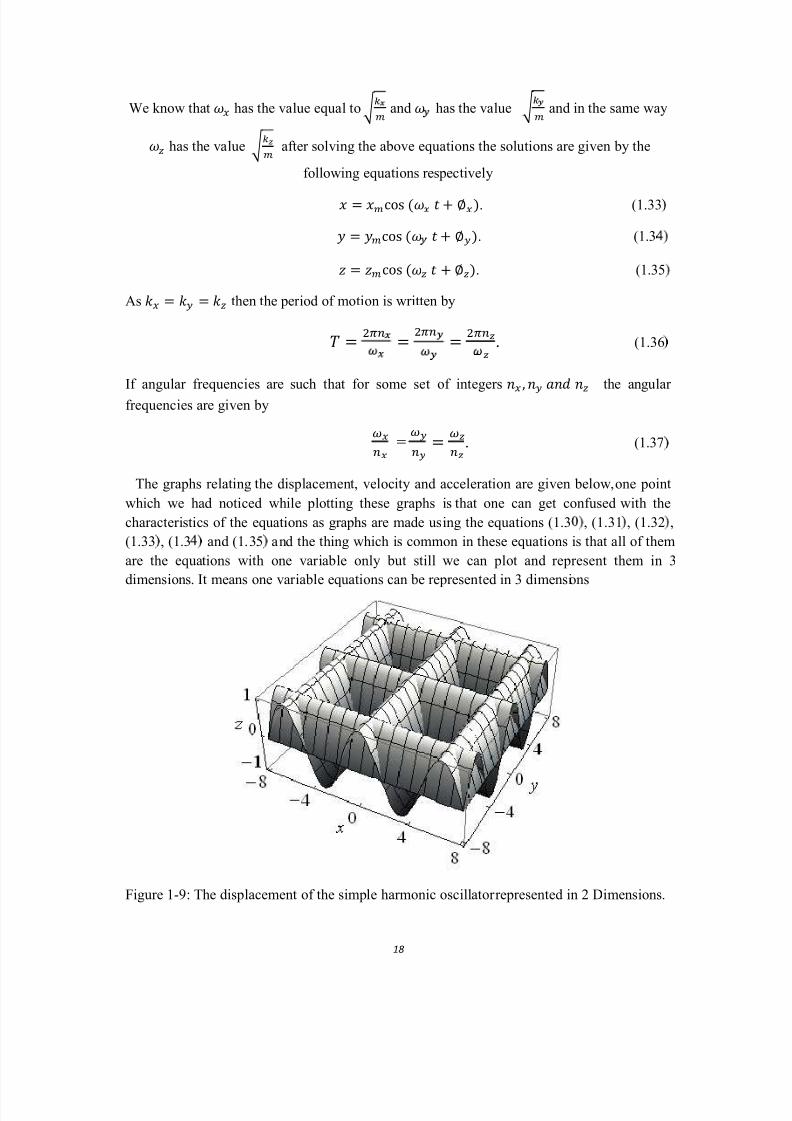
We know that has the va lue equa l to and has the va lue and in the same way
has the va lue af ter so lving the above equa tions the so lutions are g iven by the
following equa tions respec tively
. (1.33
. (1.3
. (1.35
As then the per iod of mo tion is wr itten by
. (1.36
If angu lar frequenc ies are such that for some se t of integers the angu lar frequenc ies are g iven by
= . (1.37
The graphs re lating the d isp lacemen t, velocity and acce lera tion are g iven be low ,one po int which we had no ticed wh ile p lotting these graphs is that one can ge t confused w ith thecharac ter istics of the equa tions as graphs are made us ing the equa tions (1.3 , (1.31 , (1.32 , (1.33 , (1.3 and (1.35 and the thing wh ich is common in these equa tions is that all of themare the equa tions w ith one var iab le on ly bu t still we can p lot and represen t them in 3dimens ions. I t means one var iable equa tions can be represen ted in 3 d imens ions
Figure 1-9 : The d isp lacemen t of the s imple harmon ic osc illator represen ted in 2 D imens ions.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 19/40
19
The above graph ic is represen ting equa tions (1.33 , (1.3 and (1.35 and it shows thedisp lacemen t of the s imple harmon ic osc illator in 3 d imens ions. The d ifference be tween thef ig (1-2 and f ig (1-9 is that the graph ic in two d imens ions can show us on ly the two s ides of any graph ic, the fron t or the back wh ile a graph ic in 3 d imens ions can illustrate us the shapeas we ll as the area under the curve.
Figure 1-1 : The ve loc ity of the s imple harmon ic osc illator represen ted in 3 D imens ions.
The above graph ic shows the ve locity of the s imple harmon ic osc illator in 3 d imens ions
which is g iven by the equa tion , . The d ifference be tween the f ig (1-3 andf ig (1-1 is that the graph ic in two d imens ions can show us on ly the two s ides of anygraph ic, the fron t or the back wh ile a graph ic in 3 d imens ions can illustrate us the shape aswell as the area under the curve.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 20/40
20
Figure 1-11 : The acce lera tion of the s imple harmon ic osc illator represen ted in 3 D imens ions.
The above graph ic is represen ting equa tions (1.3 , (1.31 and (1.32 and it shows theacce lera tion of the s imple harmon ic osc illator in 3 d imens ions. The d ifference be tween thef ig (1- and f ig (1-11 is that the graph ic in two d imens ions can show us on ly the two s idesof any graph ic, the fron t or the back wh ile a graph ic in 3 d imens ions can illustrate us theshape as we ll as the area under the curve.
Figure 1-12 : The energy of the s imple harmon ic osc illator represen ted in 3 D imens ions.
1-6 Simp le Pendu lum
A s imple pendu lum has a po int mass suspended from a fr ictionless suppor t by a light andinex tens i ble str ing.When we pu ll the s imple pendu lum to one s ide of equ ili br ium pos ition andrelease it, the pendu lum sw ing in ver tical plane under the inf luence of grav ity.The mo tion is
per iodic and osc illatory.
Now let us cons ider a pendu lum of leng th l and mass m. When pendu lum is d isp laced frommean to ex treme pos ition, let x and be the linear and angu lar d isp lacemen ts then the forcesacting on mass m are we ight mg and tens ion in the s tr ing. The mo tion w ill be a long the arc of
the c ircle w ith rad ius l . In equa tion (1.23 we may wr ite equa l to) and the tens ion in the s tr ing equa l to ), also we know
that the ne t force is equa l to . Subs tituting the va lues and compar ing thecoeff icients we ge t
, (1.3
(1.39

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 21/40
21
Since along y-axis there is no motion so acceleration is zero. The two components of restoring force are = mg cos and mgsin , the component is balanced by the
tension T in the string so the tangential component of the net force is = , here
negative sign indicate that F is opposite to direction of , for simple harmonic motion should be very small. So the tangential component of restoring force will become equal to
. Also we have knowledge that for small displacements, the restoring force is
proportional to the displacement and is oppositely directed. Substituting
we reach at the final relation for the time period of the simple pendulum
T = 2 . (1.40 )
Or
T = 2
. (1.41 )
From this expression we might expect that a larger mass would lead a longer period.However increasing the mass also increases the forces that act on the pendulum: gravity antension in the string. This increases k as well as m so the time period of the pendulum isindependent of m.
Figure 1-13: The force on the bob of simple pendulum.
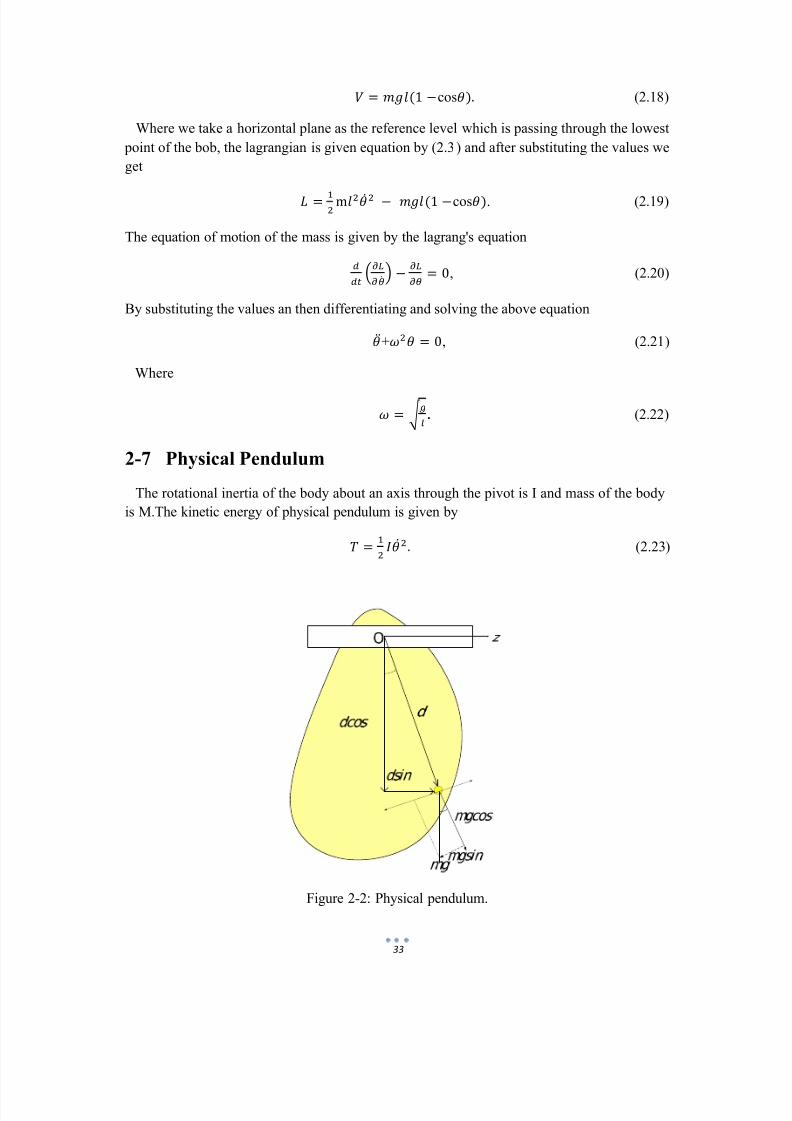
1-7 Physical Pendulum
A rigid body mounted so that it can swings in a vertical plane about some axis passingthrough it is called physical pendulum.
A body of irregular shape is pivoted about a frictionless horizontal axis through P the position is that in which centre of mass C of the body lies vertically below P . The distancefrom the pivot to centre of mass is d . The rotational inertia of the body about an axis through

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 22/40
22
the pivot is I and mass of the body is m. In the displaced position weight mg acts verticallydownward at an angle with rce) written as
. (1.42 )
Here, F is along y-axis and its magnitude is while the displacement is along x-axis
having magnitude so will be along z-axis and is written as and is equal to As the restoring torque is proportional to the . So motion is simple harmonic motion.Hence, and then we get , negative sign indicates that restoring force isclockwise when the displacement is counterclockwise and vice versa. The equation of motionis
(1.43 )
Figure 1-14: Dynamics of physical pendulum.
Here, is the angular acceleration along the and is given by is the angular
displacement substituting these values and then by simplifying we get
(1.44 )
where is the angular frequency, d is the distance, is the angular displacement and isthe moment of inertia.Also we get the values of the frequency and time period of the physical
pendulum respectively given by

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 23/40
23
. (1.45 )
T= 2 . (1.46 )
1-8 Springs In Parallel Or Series
When springs are organized in a parallel configuration as shown in figure (1.11 ) or inseries as shown in figure (1.12 ) then the springs act as a single spring with an effective springconstant.
Figure 1.11: Springs in parallel.
Figure 1-15: Springs in series.
1-8-1-1 Parallel Configuration
When the spring m in fig (1.16 ) is displaced by amount x, each spring is displaced bycorresponding amounts
, the net restoring force applied by the spring is
= + + , (1.47 )
is net force an is equal to , is the restoring force here it is equal to k x and
for parallel configuration k is equal to , is the gravitational force equal to ,is the normal force equal to . Substituting the values in equation (1.47 ) and then
putting the value of and we get equation (1.6 ). This equation leads us

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 24/40

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 25/40
25
When is negative then first spring is compressed and the second is stretched by the sameamount . Thus in such case the net force on the mass is , , is the restoring
force here it is equal to k x and for parallel configuration k is equal to , is thegravitational force equal to ), is the normal force equal to also from figure itis clear that there is no force along the y-axis so it will be equal to zero and we are left with
the net force acting only along the x-axis, after substituting the values and solving we get
, (1.49 )
It is clear from here that we get the same result that is equation (1.6 ) with the value of angular velocity equal to
(1.50 )
Figure 1-17: A variation of a parallel spring mass-system.
1-8-2 Series Configuration
For this case the springs are arranged in series as shown. If a force F is applied so as todisplace a mass m by an amount x then the first spring is displaced by an amount and thesecond spring by an amount but the total displacement will be, ,

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 26/40
26
Figure 1-18: Spring in series.
As we know that for the series configuration
. (1.51 )
From here we find the value of equal to , with the understanding that the hook's
law still applies we can surely write equqtion (1.1 ) as , Force can be writtenequal to , and after solving the equation after substitution we get equaton (1.6 ) with
= (1.52 )
1-9 Floating Objects (A Bottle In A Bucket)
Case 1: We considered a bottle floating upright in a large bucket of water as shown. Inequilibrium it is submerged to a depth below the surface of water.
The two forces on the bottle are its weight acting downward mg and the upward buoyantforce where is the density of water and A is the cross sectional area of the bottle and
by archidemes principle we know that the buoyant force is times the volume submerged
which is just Ad.The equilibrium depth is determined by the condition = . Thenet force on the bottle in equilibrium condition is given by
= + , (1.53 )

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 27/40
27
Figure 1-19: (a ) Bottle in equilibrium position. (b ) Bottle lying below the equilibrium
position. (c ) Bottle lying above the equilibrium position.
Here, is the net force and is equal to and is the buoyant force and it acts
along y-axis and its magnitude is equal to also that is gravitational forcewhich is equal to the weight of the body is acting in the downward direction given
by . After substituting the values and then comparing the coefficients of x and y on both sides we arrive at the result that as there is no force along x-axis so it will become equalto zero while comparing the forces along y-axis we get
. (1.54 )
Case 2: When the bottle is more dipped in the water up to the depth so that it lies below the equilibrium position, in this case the net force will be given by equation (1.52 ) Here, is the net force acting on the bottle in the compressed position and is equal to the
, while is the buoyant's force and is equal to ( ) and is thegravitational force which will be equal to the weight of the bottle and is given by )
put these values in equation (1.52 ). As there is no force acting along x-axis so it is equal tozero and we are left only with the y-component of the force given by
.
Substituting the value of
and then putting we get the more précised
result
, (1.55 )
= . (1.56 )
F
mg
F
mg (a) (b) (c)

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 28/40
28
Case 3:
In this case the large portion of the bottle is outside or above the surface of water as shown
Or we can say this is similar to the compression case, So we have the net force acting on the bottle in the compressed position and is equal to , while is the buoyant's force
and is equal to ( ) and is the gravitational force which will be equal to theweight of the bottle and is given by ) putting these values in the aboveequation.Here there is no force acting along x-axis so it is equal to zero and we are left onlywith the y-component of the force given by
(1.57 )
Substituting the value of and then putting we get equation (1.54 ) with
value of the angular velocity equal to
= . (1.58 )
1-10 Tunnel In Earth
We drill a hole through the earth having the radius R and mass M along a diameter and drop a small ball of mass m down the hole. Here, earth assumed to be a uniform sphere (a
poor assumption ).
Figure 1-20: A hole through the centre of the earth (assume to be uniform ). When an objectis at varying distance x from the centre.
When y then the net force is acting on the ball which is along x-axis as well as y-axis and is given by and is the gravitational force and its value is given
by , so from above relation
. (1.59 )

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 29/40
29
Comparing the x and y components on both sides we get but as there is no forcealong the x-axis so it is equal to zero. Also,
Fraction of mass . (1.60 )
So we get the fraction of the mass equal to , gravitational force becomes
Putting the value of in the above equation and then substituting the value of equal to
and simplifying we can get the précised result,that is given by
, (1.61 )
Here,
= . (1.62 )
The equation (1.61 ) shows that the motion of the bob in tunnel of earth is an example of simple harmonic motion.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 30/40
30
RE F ORMULATIONS O F PROBLEMS USING LAGRANGIAN TECHNIQUES
2-1 Introduction
Lagrangian mechanics is used as the first alternative to the newtonian mechanics. Usinglagrangian mechanics is sometimes useful instead of newtonian mechanics in the problemswhere the equations of newtonian mechanics becomes difficult to solve. In lagrangianmechanics we begin by defining a quantity called the LAGRANGIAN ( L) which is definedas: The difference between kinetic energy kinetic energy T and potential energy V .
2-2 Horizontal OscillationsAs we know that kinetic energy of the system is
. (2.1 )
The potential energy is
. (2.2 )
The lagrangian L of the system is given by
(2.3 )
Substituting the values from equqtions (2.1 ) and (2.2 ) in equqtion (2.3 ) we can get the valueof lagrangian L. Now since the lagrangian equation of the dynamical system is
(2.4 )
2

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 31/40
31
By substituting the values from equation (2.1 ) and (2.2 ) in (2.4 ) we can get the equation of motion of simple harmonic oscillator (1.6 ).
2-3 Vertical OscillationsTo solve the vertical oscillations using lagrangian , first of all we consider the kinetic
energy of the system which can be written as
m . (2.5 )
According to the law of conservation of energy the potential energy is
. (2.6 )
We can get the lagrangian L by usimg equations (2.5 ) and (2.6 ) in equation (2.3 ), thelagrange's equation for the vertical oscillations will be
. (2.7 )
After putting the values and then solving we get
(2.8 )
2-4 Simple Harmonic Motion In 2 Dimensions
Kinetic energy of system in 2-Dimensions is given by
T= (2.9 )
Here, cos -r sin is equal to similarly sin + r cos is equal to , Potential energy is
given by the relation V = and then we can write it as V = The
lagrangian formula after substitution of the values is given by
L= + . (2.10 )
The lagrangian equation is given by the equation (2.7 ).After substitution of the values the
final result of the equation of motion in 2-Dimensions
(2.11 )
2-5 Simple Harmonic Motion In 3 Dimensions
T = (2.12 )

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 32/40
32
V = + (2.13 )
Along x-axis the lagrangian equation is given by equation (2.4 ), after substitution it will become
+ =0. (2.14 )
Along y-axis the lagrangian equation is given by equation (2.7 ), after substitution it will become
+ =0. (2.15 )
Along z-axis the lagrangian equation is written as ) , after substitution it will
become
+ =0. (2.16 )
2-6 Simple Pendulum
Figure 2-1: Simple Pendulum.
We choose the angle made by string of the pendulum with the vertical axis as generalizedcoordinates. The kinetic energy of the pendulum bob is
T= (2.17 )
where m is the mass of the bob and l is the length of the pendulum. The potential energy of the mass is
8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 33/40
33
cos (2.18 )
Where we take a horizontal plane as the reference level which is passing through the lowest point of the bob, the lagrangian is given equation by (2.3 ) and after substituting the values weget
cos . (2.19 )
The equation of motion of the mass is given by the lagrang's equation
, (2.20 )
By substituting the values an then differentiating and solving the above equation
+ , (2.21 )
Where
. (2.22 )
2-7 Physical Pendulum
The rotational inertia of the body about an axis through the pivot is I and mass of the bodyis M.The kinetic energy of physical pendulum is given by
(2.23 )
Figure 2-2: Physical pendulum.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 34/40
34
The potential energy of physical pendulum is given by
. (2.24 )
The lagrangian L is given by equation (2.3 ) and after substituting the values we get
(2.25 )
Since lagrangian equation of motion is given by equation (2.20 ) so after substituting thevalues and then solving we get the equation of motion of physical pendulum.
, (2.26 )
where
. (2.27 )
2-8-1 Parallel Configuration
Figure 2.3: Springs in parallel.
When the spring m in fig (2.3 ) is displaced by amount x, each spring is displaced bycorresponding amounts , the kinetic energy of the spring is

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 35/40
35
And because we have so kinetic energy of the system is given by the equqtion
(2.1 ). The potential energy is given by , after simplification we get
(2.28 )
The lagrange's equation is given by equqtion (2.3 ) and then after putting the values we get
m . (2.29 )
The lagrange's equation is given by equation (2.7 ) after solving we get
. (2.30 )
2-8-2 Series Configuration
Figure 2.4: Springs in series.
For this case the springs are arranged in series as shown. If a force F is applied so as todisplace a mass m by an amount x then the first spring is displaced by an amount and the
second spring by an amount but the displacement will be Where
and the kinetic energy will be
. (2.31 )
While the potential energy is given by
V= = = (2.32 )

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 36/40
36
As the lagrangian is given by the equation (2.3 ) and the lagrange's equation is given by
equation (2.7 ). If is the angular velocity given by then finally we will get the
equqtion of motion of simple harmonic oscillator that is equation (1.6 ).
2-9 Floating Object In order to find the lagrangian for the floating object we have to find the kinetic as well as
the potential energy of the object. The kinetic energy of the floating object is given by
. (2.33 )
According to the law of conservation of energy
V= (2.34 )
We can substitute these values in the formula of lagrangian and will get
(2.35 )
The lagrangian equation is given by the equation (2.7 ). By substituting all the above valuesand then simplifying we can get equation of motion of the floating object
. (2.36 )
2-10 Tunnel In Earth
In order to find the lagrangian for the earth, we must know the kinetic and potential energyof the earth. The kinetic energy of the earth is given by equation (2.5 ). The potential energyof the earth can be given by
. (2.37 )
And then after simplification we can get .We get after substitution of the values in the
formula of lagrangian we can get
L=
. (2.38 )
The lagrangian equation is given by the equation (2.7 ).After substituting the values and thenafter simplification we can equation (2.8 ) that is the equation of motion.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 37/40
37
REFERANCES:
[1] Javier E. Hasbun , C la ss ical M ech anic s , by Jones and Bartlett publishers, USA, 2009.
[2] Hugh D. Young & Roger A. Freedman, U niver sit y phy sic s wit h mod ern phy sic s (12 th edition ), Sears And Zemansky¶s edition, by Addison-Wesley publishing company, USA,2007.
[3] Raymond A. Serway & John W. Jewett, P hy sic s f o r scienti st s and eng ineer s (6th edition ),By Thomson-Brooks/Cole Custom Publishing company, 2003.
[4] Francis W. Sears, U niver sit y phy sic s (3rd edition ), by Addison - Wesley Press Inc , USA,2000.
[5] John R. Taylor, C la ss ical M ech anic s, by university science books, B. Jane EllisSouth Orange, New Jersey, 2005.
[6] Tai L. Chows, C la ss
ical M ech anic s
, by john wiley & sons Inc. USA, 1995.[7] Murray R. Spiegel, S chau m's o utli ne o f t heo re tical mech anic s wit h la gr ange 's equati o n,
by Hill Education, 1977.
[8] Herbert G. , Charles P. Poole & John L. Safco, C la ss ical M ech anic s (3rd Edition ) ,Addison Wisley, USA, 2002.[9] David M. , I nt r od uctio n t o cla ss ical mech anic s ed itio n, Cambridge University Press ,2008.
[10]Charles K. & Walter D. Knight , M ech anic s (2nd edition ), by Tata Mgraw Hill, 1973.
[11] Vernon B. & Marton O. , C la ss ical M ech anic s a mod ern per s pective (2nd edition ),McGraw-Hill College, 1995.
[12] Ronald L. Reese, 1 st edition, U niver sit y P hy sic s, Brooks Cole, 1999.

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 38/40
38
8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 39/40
39

8/9/2019 My Final Year Thesis
http://slidepdf.com/reader/full/my-final-year-thesis 40/40





























