Embed Size (px)
Citation preview

Multisource Least-squares Reverse Time Migration
Wei Dai

Outline• Introduction and Overview
• Chapter 2: Multisource least-squares reverse time
migration
• Chapter 3: Frequency-selection encoding LSRTM
• Chapter 4: Super-virtual inteferometric diffractions
• Summary

Introduction: Least-squares Migration
• Seismic migration: Given: Observed data
modelling operator
Goal: find a reflectivity model to explain by solving
the equation
Direct solution: expensive
Conventional migration:
Iterative solution:
Migration velocity

0 X (km) 60 X (km) 6
30
Z (
km)
• Problems in conventional migration image
Introduction: Motivation for LSM
migration artifacts
migration artifacts
imbalanced amplitudeimbalanced amplitude

• Least-squares migration has been shown to
produce high quality images, but it is considered
too expensive for practical imaging.
• Solution: combine multisource technique and
least-squares migration (MLSM).
Problem of LSM

Motivation for MultisourceMotivation for Multisource
Multisource LSMTo: Increase efficiency Remove artifacts Suppress crosstalk
• Problem: LSM is too slow
• Solution: multisource phase-encoding technique• Solution: multisource phase-encoding technique
Many (i.e. 20) times slower than standard migrationMany (i.e. 20) times slower than standard migration
Multisource Migration Image
Multisource CrosstalkMultisource Crosstalk

Overview• Chapter 2 : Multisource least-squares reverse time
migration is implemented with random time-shift and
source-polarity encoding functions.
• Chapter 3: Multisource LSRTM is implemented with
frequency-selection encoding for marine data.
• Chapter 4: An interferometric method is proposed to
extract diffractions from seismic data and enhance its
signal-to-noise ratio.

Outline• Introduction and Overview
• Chapter 2: Multisource least-squares reverse time
migration
• Chapter 3: Frequency-selection encoding LSRTM
• Chapter 4: Super-virtual inteferometric diffractions
• Summary

Random Time Shift𝑳𝟏𝒎=𝒅𝟏
O(1/S) cost!
Encoding Matrix
Supergather
Random source time shifts
𝑳𝟐𝒎=𝒅𝟐
𝒅=𝑵𝟏𝒅𝟏+𝑵𝟐𝒅𝟐
Encoded supergather modeler
𝑳𝒎=[𝑵 ¿¿𝟏𝑳𝟏+𝑵𝟐 𝑳𝟐 ]𝒎¿

Random Time Shift𝑳𝟏𝒎=𝒅𝟏
Encoding Matrix
Supergather
𝑳𝟐𝒎=𝒅𝟐
𝒅=𝑵𝟏𝒅𝟏+𝑵𝟐𝒅𝟐
Encoded supergather modeler
𝑳𝒎=[𝑵 ¿¿𝟏𝑳𝟏+𝑵𝟐 𝑳𝟐 ]𝒎¿
× (-1) × (+1)

Conventional Least-squares
Find: an s.t. min
Given: &
Direct solution:
Iterative solution:
Note: subscripts agree
If is too big
In general, hugedimension matrix

Problem: Each prediction is a FD solve
Solution: Multisource technique
Conventional Least-squares

Multisource Least-squares
Find: an s.t. min
Given: &
Direct solution:
In general, smalldimension matrix
If is too big
Iterative solution:
+ crosstalk

0 X (km) 18
0Z
(km
)7.
5
4.5
1.5
km/s
Size: 1800 x 750Grid interval: 10 mSource number: 1800Receiver number: 1800
FD kernel: 2-4 staggered gridSource: 15 Hz
HESS VTI Model

HESS VTI ModelDelta and Epsilon Models
0Z
(km
)7.
5
1.5
0
0 X (km) 18
0Z
(km
)7.
5
2.5
0
Delta
Epsilon

Migration Velocity and Reflectivity
0Z
(km
)7.
5
4.5
1.5
0 X (km) 18
0Z
(km
)7.
5
0.2
-0.4
km/sMigration Velocity
Reflectivity

RTM VS Multisource LSRTM
0 X (km) 18
0Z
(km
)7.
5
0 X (km) 18
0Z
(km
)7.
5
8 supergather30 iterationsSpeedup: 3.75
Standard RTM
Multisource LSRTM, 1 Supergather Multisource LSRTM, 4 Supergather Multisource LSRTM, 8 Supergather
Artifacts removed
Resolution Enhanced

Signal-to-noise Ratio
SNR ∞

3D SEG/EAGE Model400 Shots Evenly Distributed400 Shots Evenly Distributed
Size: 676 x 676 x 201Grid interval: 20 mReceiver: 114244
Source: 5.0 hz
13.5 km
4.0 km 13.5 km

Smooth Migration Velocity
20
13.5 km
4.0 km 13.5 km
Obtained by 3D boxcar smoothingObtained by 3D boxcar smoothing

Conventional RTM
13.5 km
4.0 km13.5 km
400 Shots, Migrated One by One400 Shots, Migrated One by One

13.5 km
4.0 km13.5 km
LSRTM400 Shots, 25 Shots/Supergather400 Shots, 25 Shots/Supergather

13.5 km
4.0 km13.5 km
Conventional RTM100 Shots100 Shots

13.5 km
4.0 km13.5 km
LSRTM100 Shots, 10 Shots/Supergather100 Shots, 10 Shots/Supergather

Chapter 2: Conclusions
• MLSM can produce high quality images efficiently.
LSM produces high quality image.
Multisource technique increases computational
efficiency.
SNR analysis suggests that not too many iterations
are needed.

• Random encoding is not applicable to marine streamer data.
Fixed spread geometry (synthetic) Marine streamer geometry (observed)
6 traces 4 traces
Mismatch between acquisition geometries will dominate the misfit.
Chapter 2: Limitations

Outline• Introduction and Overview
• Chapter 2: Multisource least-squares reverse time
migration
• Chapter 3: Frequency-selection encoding LSRTM
• Chapter 4: Super-virtual inteferometric diffractions
• Summary

28
observeddata
simulateddata
misfit = erroneous
misfit
Problem with Marine Data

29
Solution• Every source is encoded with a unique
signature.
observed simulated
• Every receiver acknowledge the contribution from the ‘correct’ sources.

4 shots/group
R( )w
Group 1
Nw frequency bands of source spectrum:
Frequency Selection
2 km
w
Accommodate up to Nw shots

Single Frequency Modeling
(𝜵𝟐+𝝎𝟐
𝒗𝟐 )~𝑷=−𝐖 (𝝎 )𝛅(𝒙 −𝒔)
Helmholtz Equation
(𝜵𝟐−𝟏𝒗𝟐
𝝏𝟐
𝝏𝟐 𝒕 )𝐏=−𝐑𝐞 {𝐖 (𝝎 )𝐞𝐱𝐩 (−𝒊𝝎𝒕)}𝛅(𝒙−𝒔)
Acoustic Wave Equation
• Advantages: Lower complexity in 3D case.
Applicable with multisource technique.
Harmonic wave source

Single Frequency Modeling
(𝜵𝟐−𝟏𝒗𝟐
𝝏𝟐
𝝏𝟐 𝒕 )𝐏=−𝐑𝐞 {𝐖 (𝝎 )𝐞𝐱𝐩 (−𝒊𝝎𝒕)}𝛅(𝒙−𝒔)
Am
plit
ud
e
T T

Single Frequency ModelingA
mp
litu
de
0 Freqency (Hz) 50
Am
plit
ud
e
20 Freqency (Hz) 30

Marmousi2
0 X (km) 8
0Z
(km
)3
.5
4.5
1.5
km/s
• Model size: 8 x 3.5 km• Shots: 301
• Cable: 2km
• Receivers: 201
• Freq.: 400 (0~50 hz)

0 X (km) 8
0Z
(km
)3
.5
0 X (km) 8
Z (
km)
3.5
Conventional RTM0
LSRTM Image (iteration=1)LSRTM Image (iteration=20)LSRTM Image (iteration=80) Cost: 2.4

Frequency-selection LSRTM of 2D Marine Data
0 X (km) 18.7
0Z
(km
)2
.5
2.1
1.5
km/s
• Model size: 18.7 x 2.5 km • Freq: 625 (0-62.5 Hz) • Shots: 496 • Cable: 6km• Receivers: 480

Conventional RTM
Frequency-selection LSRTM
Z (
km)
2.5
0Z
(km
)2
.50
0 X (km) 18.7

Freq. Select LSRTM
Conventional RTM Conventional RTM
Freq. Select LSRTM
Zoom Views

Chapter 3: Conclusions
• MLSM can produce high quality images efficiently.
LSM produces high quality image.
Frequency-selection encoding applicable to marine
data.
• Limitation:
High frequency noises are present.

Outline• Introduction and Overview
• Chapter 2: Multisource least-squares reverse time
migration
• Chapter 3: Frequency-selection encoding LSRTM
• Chapter 4: Super-virtual inteferometric diffractions
• Summary

Chapter 4: Super-virtual inteferometric diffractions
• Diffracted energy contains valuable
information about the subsurface structure.
• Goal: extract diffractions from seismic data
and enhance its SNR.

Rotate
Guide Stars

Step 1: Virtual Diffraction Moveout + Stacking
y zw3
dt
w2 w1 y z
y’
dt
dt
dt
w
y z
y’
=
Super-virtual stacking theory

Step 2: Redatum virtual refraction to known surface position
y z
y’
y zx y zx
=*
y z x x
=
y z
i.e.
y’
Super-virtual stacking theory

Step 3: Repeat Steps 1&2 for a Different Master Trace
y z
y’
y zx y zx
=*
y z x x
=
y z
i.e.
y’
Super-virtual stacking theory

Stacking Over Master Trace Location
x zDesired shot/
receiver combination
Common raypaths
Super-virtual stacking theory

Super-virtual Diffraction Algorithm
=w z
=
+
*
1. Crosscorrelate and stack to generate virtual diffractions
2. Convolve to generate super-virtual diffractions
3. Stack super-virtual diffractions to increase SNR
w
w z w z
w z
Virtual srcexcited at -tzz’ z’
w z
w z w z w z
+

Synthetic Results: Fault Model
0 X (km) 6
0Z
(k
m)
3
3.4
1.8
km/s

Synthetic Shot Gather: Fault Model
0 Offset (km)
6
0ti
me
(s)
3
Diffraction

Synthetic Shot Gather: Fault Model0.
5ti
me
(s)
1.5
Raw Data
0 Offset (km) 6
0.5
tim
e (s
)1.
5
0 Offset (km) 6
Our Method
0.5
tim
e (s
)1.
5
Median Filter

Estimation of Statics
0 Offset (km) 6
0.5
tim
e (s
)1.
0
Picked Traveltimes
Predicted Traveltimes
Estimate statics
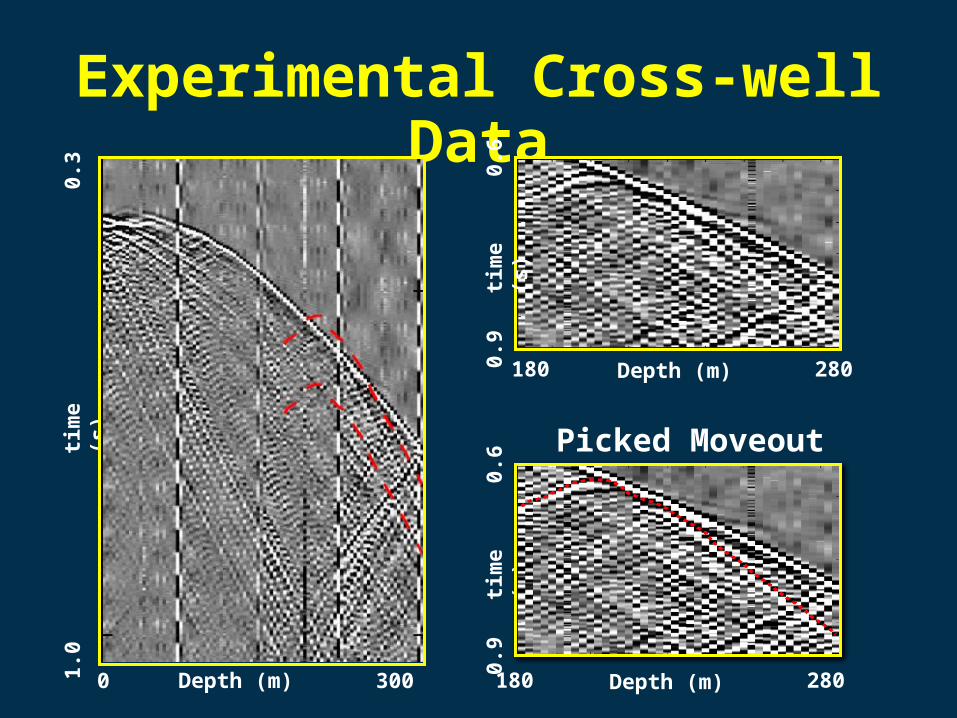
Experimental Cross-well Data
0 Depth (m) 300
0.3
tim
e (s
)1.
0
180 Depth (m) 280
0.6
tim
e (s
)0.
9
Picked Moveout
0.6
tim
e (s
)0.
9
180 Depth (m) 280

Experimental Cross-well Data
180 Depth (m) 280
0.6
tim
e (s
)0.
9
180 Depth (m) 280
0.6
tim
e (s
)0.
9
Median Filter
Time Windowed
180 Depth (m)
0.6
tim
e (s
)0.
9
280
Super-virtual Diffractions

Experimental Cross-well Data
0 Depth (m) 300
0.3
tim
e (s
)1.
0
180 Depth (m) 280
0.6
tim
e (s
)0.
9
Super-virtual Diffraction
0.6
tim
e (s
)0.
9
Median Filtered
180 Depth (m) 280

• Super-virtual diffraction algorithm can greatly improve
the SNR of diffracted waves..
Limitation• Dependence on median filtering when there are other coherent
events.• Wavelet is distorted (solution: deconvolution or match filter).
Chapter 4: Conclusions

Outline• Introduction and Overview
• Chapter 2: Multisource least-squares reverse time
migration
• Chapter 3: Frequency-selection encoding LSRTM
• Chapter 4: Super-virtual inteferometric diffractions
• Summary

Chapter 2: Multisource LSRTM
• Multisource LSRTM is implemented with random encoding
functions.
LSM produces high quality image. Multisource technique increases computational
efficiency.
Multisource LSRTM, 8 Supergather

Chapter 2: Frequency-selection LSRTM
• Multisource LSRTM is implemented with frequency-
selection encoding functions.
Applicable to marine data.
Frequency-selection LSRTM

• Super-virtual diffraction algorithm can extract diffraction
waves and greatly improve its SNR.
Chapter 4: Super-virtual inteferometric diffractions
Before Before After

Acknowledgements
I thank the sponsors of CSIM consortium for their financial support.
I thank my advisor Prof. Gerard T. Schuster and other committee members for the supervision
over my program of study.
I thank my fellow graduate students for the collaborations and help over last 4 years.

WorkflowRaw data
Pick a master trace
Cross-correlate all the traces with the master trace
Repeat for all the shots and stack the result to give virtual diffractions
Convolve the virtual diffractions with the master trace to restore original traveltime
Stack to generate Super-virtual Diffractions

Diffraction Waveform Modeling
Born
Modeling
0 Distance (km) 3.8
0D
epth
(km
)1.
20
Dep
th (
km)
1.2
0ti
me
(s)
4.0
0 Distance (km) 3.8
Velocity
Reflectivity

Diffraction Waveform Inversion
0 Distance (km) 3.8
0D
epth
(km
)1.
20
Dep
th (
km)
1.2
Initial Velocity
Estimated Reflectivity
0D
epth
(km
)1.
2
Inverted Velocity
0 Distance (km) 3.8
0D
epth
(km
)1.
2
True Velocity




![Multisource Least-Squares Extended Reverse-time Migration ... · Multisource Least-Squares Extended Reverse-time Migration with Preconditioning Guided Gradient Method Yujin Liu[1][2]](https://img.dokumen.tips/doc/110x75/5e748f99cbb3d41e7a7dbab3/multisource-least-squares-extended-reverse-time-migration-multisource-least-squares.jpg)
























