Embed Size (px)
Citation preview

M.Tech. Mechatronics Curriculum
(2014-2015 onwards) University Core COURSE CODE COURSE TITLE L T P C
ENG 601 Professional and Communication Skills OR Foreign Language
0 0 4 2
MAT 502 Applied Engineering Mathematics 3 1 0 4 Science, Engineering and Technology conference-I - - - 2 Science, Engineering and Technology conference-II - - - 2
Total credits: 10 University Elective
COURSE CODE COURSE TITLE L T P C
University Elective 3 0 0 3
Total Credits: 3 Programme Core
COURSE CODE COURSE TITLE L T P C MEE
MEE
530
531
Principles of Mechanical Systems (For candidates with BE/BTech degree in Electrical Engineering or related branches; Computer Science and engineering or related branches)
OR Principles of Electronic Devices (For candidates with BE/BTech degree in Mechanical Engineering, Civil Engineering, and related branches)
3 0 0 3
EEE 615 Microcontroller Architecture and Organization 3 0 2 4
EEE 502 Advanced Sensor Systems and Instrumentation 3 0 2 4 MEE 537 Mechatronics System Design 3 0 0 3 EEE 504 Power Electronics and Drives 3 0 2 4 MEE 528 Fluid Power Systems and Factory Automation 3 0 2 4 MEE 533 Robot Dynamics and Analysis 2 1 2 4 MEE 536 Micro Electro-mechanical Systems 3 0 0 3
MEE 699 Masters Dissertation - - - 16
Total Credits: 29 + 16 = 45

Programme Electives
S.No COURSE CODE COURSE TITLE L T P C
1 ECE 605 Advanced Signal Processing 3 0 2 4 2 EEE 544 Data Acquisition and Signal Conditioning 3 0 2 4 3 MEE 609 Computational Techniques for Vibration Analysis and Control 2 1 2 4 4 MEE 505 Vehicle Dynamics 3 1 0 4 5 MEE 522 Computer Integrated Manufacturing 2 1 2 4 6 MEE 521 Finite Element Methods 2 1 2 4 7 EEE 503 Embedded Sensors Systems Design 3 0 0 3 8 EEE 505 Digital Control Systems 3 0 0 3 9 EEE 562 Sensor networks 3 0 0 3
10 MEE 529 Autotronics and Vehicle Intelligence 3 0 0 3 11 MEE 535 Fuzzy logic and neural networks 3 0 0 3 12 MEE 534 Machine Vision System 3 0 0 3 13 MEE 543 Computational Fluid Dynamics 3 0 0 3 14 MEE 549 Advanced Vibration Engineering 2 1 0 3 15 MEE 554 Electro-optic Systems 3 0 0 3 16 MEE 556 System Modeling and Simulation 3 0 0 3 17 MEE 603 Reliability Engineering 3 0 0 3 18 MEE 607 Real-Time Systems and software development 3 0 0 3 19 MEE 611 Design of Hydraulic and Pneumatic Systems 3 0 0 3 20 MEE 695 Industry Internship 0 0 0 2 21 MEE 696 Research Internship 0 0 0 2 22 Diagnostic Techniques 3 0 0 3 23 Programmable logic controllers 3 0 0 3
Credit Summary Credits Minimum number of credits for Qualifying degree 73
University Core 10
University Elective 3
Programme Core 45
Programme Elective (Minimum) 15
University Core
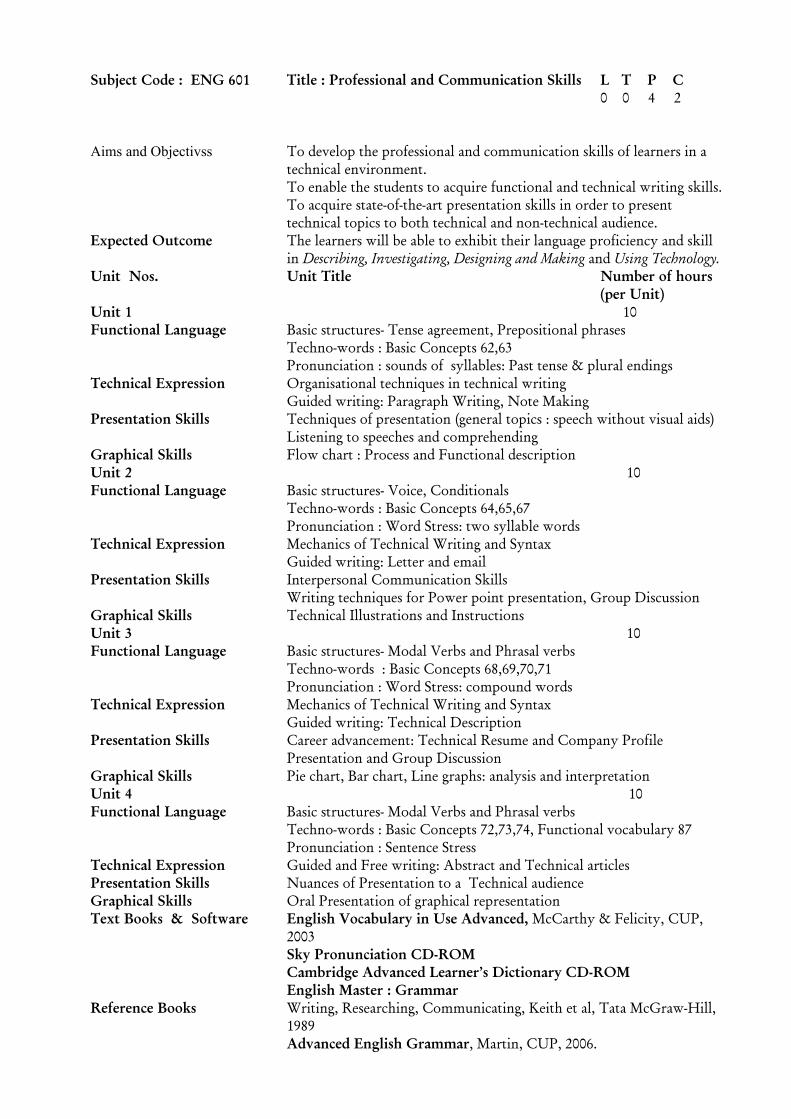
Subject Code : ENG 601 Title : Professional and Communication Skills L T P C 0 0 4 2
Aims and Objectivss To develop the professional and communication skills of learners in a
technical environment. To enable the students to acquire functional and technical writing skills. To acquire state-of-the-art presentation skills in order to present technical topics to both technical and non-technical audience.
Expected Outcome
The learners will be able to exhibit their language proficiency and skill in Describing, Investigating, Designing and Making and Using Technology.
Unit Nos. Unit Title Number of hours (per Unit)
Unit 1 10 Functional Language Basic structures- Tense agreement, Prepositional phrases
Techno-words : Basic Concepts 62,63 Pronunciation : sounds of syllables: Past tense & plural endings
Technical Expression Organisational techniques in technical writing Guided writing: Paragraph Writing, Note Making
Presentation Skills Techniques of presentation (general topics : speech without visual aids) Listening to speeches and comprehending
Graphical Skills Flow chart : Process and Functional description Unit 2 10 Functional Language Basic structures- Voice, Conditionals
Techno-words : Basic Concepts 64,65,67 Pronunciation : Word Stress: two syllable words
Technical Expression Mechanics of Technical Writing and Syntax Guided writing: Letter and email
Presentation Skills Interpersonal Communication Skills Writing techniques for Power point presentation, Group Discussion
Graphical Skills Technical Illustrations and Instructions Unit 3 10 Functional Language Basic structures- Modal Verbs and Phrasal verbs
Techno-words : Basic Concepts 68,69,70,71 Pronunciation : Word Stress: compound words
Technical Expression Mechanics of Technical Writing and Syntax Guided writing: Technical Description
Presentation Skills Career advancement: Technical Resume and Company Profile Presentation and Group Discussion
Graphical Skills Pie chart, Bar chart, Line graphs: analysis and interpretation Unit 4 10 Functional Language Basic structures- Modal Verbs and Phrasal verbs
Techno-words : Basic Concepts 72,73,74, Functional vocabulary 87 Pronunciation : Sentence Stress
Technical Expression Guided and Free writing: Abstract and Technical articles Presentation Skills Nuances of Presentation to a Technical audience Graphical Skills Oral Presentation of graphical representation Text Books & Software English Vocabulary in Use Advanced, McCarthy & Felicity, CUP,
2003 Sky Pronunciation CD-ROM Cambridge Advanced Learner’s Dictionary CD-ROM English Master : Grammar
Reference Books
Writing, Researching, Communicating, Keith et al, Tata McGraw-Hill, 1989 Advanced English Grammar, Martin, CUP, 2006.
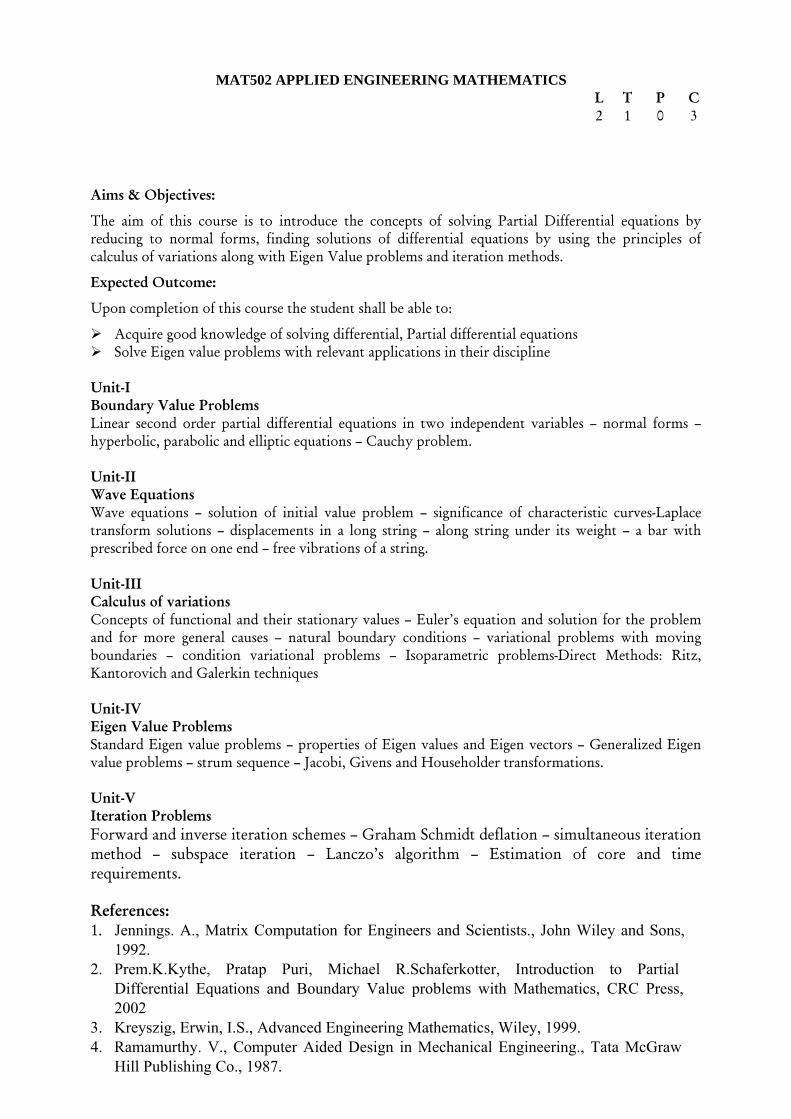
MAT502 APPLIED ENGINEERING MATHEMATICS L T P C 2 1 0 3
Aims & Objectives:
The aim of this course is to introduce the concepts of solving Partial Differential equations by reducing to normal forms, finding solutions of differential equations by using the principles of calculus of variations along with Eigen Value problems and iteration methods.
Expected Outcome:
Upon completion of this course the student shall be able to:
Acquire good knowledge of solving differential, Partial differential equations Solve Eigen value problems with relevant applications in their discipline
Unit-I Boundary Value Problems Linear second order partial differential equations in two independent variables – normal forms – hyperbolic, parabolic and elliptic equations – Cauchy problem.
Unit-II Wave Equations Wave equations – solution of initial value problem – significance of characteristic curves-Laplace transform solutions – displacements in a long string – along string under its weight – a bar with prescribed force on one end – free vibrations of a string.
Unit-III Calculus of variations Concepts of functional and their stationary values – Euler’s equation and solution for the problem and for more general causes – natural boundary conditions – variational problems with moving boundaries – condition variational problems – Isoparametric problems-Direct Methods: Ritz, Kantorovich and Galerkin techniques Unit-IV Eigen Value Problems Standard Eigen value problems – properties of Eigen values and Eigen vectors – Generalized Eigen value problems – strum sequence – Jacobi, Givens and Householder transformations. Unit-V Iteration Problems Forward and inverse iteration schemes – Graham Schmidt deflation – simultaneous iteration method – subspace iteration – Lanczo’s algorithm – Estimation of core and time requirements. References: 1. Jennings. A., Matrix Computation for Engineers and Scientists., John Wiley and Sons,
1992. 2. Prem.K.Kythe, Pratap Puri, Michael R.Schaferkotter, Introduction to Partial
Differential Equations and Boundary Value problems with Mathematics, CRC Press, 2002
3. Kreyszig, Erwin, I.S., Advanced Engineering Mathematics, Wiley, 1999. 4. Ramamurthy. V., Computer Aided Design in Mechanical Engineering., Tata McGraw
Hill Publishing Co., 1987.

5. Reny – Dannemeyer, “Introduction to Partial Differential Equations and Boundary Value problems”, McGraw Hill, 1968.

Program Core

MEE530 Principles of Mechanical Systems L T P C
3 0 0 3
Aims and objectives: This course aims at introducing the basics of mechanical theories (like force, work done etc.,) commonly used in mechanical Engineering for students of Electrical, Electronics and Computer streams Learning Outcomes: On completion of course the students will be able to
• Acquire the fundamental Knowledge of various Mechanical engineering concepts. • Engineer mechanical systems with precision and accuracy.
Unit I Statics and Dynamics Introduction to mechanics- Fundamental principles-Vector operation-Equilibrium of forces- coplanar forces-equivalent system of forces- principle of transmissibility- friction- problems involving dry friction-virtual work. Kinematics of particles-velocity and acceleration-uniform rectilinear motion-Newton’s second law of motion-linear momentum- equation of motion-angular momentum-work of force- kinetic energy of particles-principles of impulse and impact. Unit II Theory of Machines Kinematics – links pairs & mechanisms-4 Bar mechanism – slider crank mechanisms –Velocity and acceleration in links– Mechanism synthesis – Determination of forces in links and joints.
Single degree freedom systems – Forced, damped vibrations – System response time constant – Vibration isolation – Torsional vibrations – Two rotor systems. Unit III Design Engineering Design of shafts – springs – power screws– Design of Belt drives – Spur gear Application of journal bearings and rolling elements bearings– Hydrostatic and aerostatic – bearings. Unit IV Manufacturing Technology Metal forming- forging- casting, Metal Machining- Lathe-Drilling-Shaper, Metal Joining- Welding Non-traditional machining- Introduction to CNC Unit V Automotive Engineering IC Engines-SI and CI- Fuel injection and Ignition - Steering and Suspension systems- transmission systems-clutch, gearbox, propeller shaft, universal joint, differential- brake systems- starting motor and drive mechanism. References: 1. P.Beer & Johnson, Vector Mechanics for Engineers and Scientists Statics and Dynamics, Tata
McGraw Hill, New Delhi, 2001 2. Shingley.J.E., Theory of Machines and Mechanisms, 2nd Edition, McGraw Hills Inc, 1995. 3. J.E. Shigley, Mechanical Engineering Design, McGraw Hill International, 2001. 4. Joseph Heitner, Automotive Mechanics, affiliated east west Pvt. Ltd.

MEE 531 Principles of Electronic Devices
L T P C 3 0 0 3
Aims and objectives: This course provides comprehensive knowledge of the fundamental concepts about electronic devices and their inherent characteristics which makes them applicable in various fields of Engineering. Learning Outcomes: On completion of the course, the students will be able to
• acquire the knowledge of analog and digital devices • Understand the wide applications of these devices
Unit I Review Semiconductor devices: Two terminal devices – BJT, JF ET, MOSFET, Four terminal devices, SCR, DIAC, TRIAC – Photo devices:- Photo diode – Photo transition, LED, LCD. Unit II Amplifier – Transistor as an amplifier, BJT, FET amplifier (qualitation study) – single stage, multistage Power Amplifiers – class A, B, C and D Amplifiers. Unit III Operational amplifiers - Introduction op-amp, Specification and characteristics, Application – constant gain, voltage summing, voltage Buffer, Instrumentation circuits, Active Filters.
Unit IV Introduction to computing – Number, system and code conversion, Logic gates – Boolean algebra – Combinational circuit design, Sequential circuit – Flip flops – RS, JK, T,D, Counters, Shift registers,. Unit V Qualitative Study & Interfacing Concepts - Decoder, Encoder, MUX, DEMUX, Memories – RAM, ROM, PROM, EPROM, EEPROM, Programmable logic devices. References: 1. Electronic devices & Circuit theorem – 8th Ed., - Robert L Boylested, Pearson
Education 2. Digital Fundamentals – 3rd Edition, Floyd. Pearson Education 3. Electronic Devices – Floyd – Pearson Education 4. Electronic Principle – Albert Paul Malvino – Tata McGraw Hill, Sixth Edition 1

EEE 615 Microcontrollers Architecture and Organisation L T P C
3 0 2 4
Aims and objectives This course is aimed in building knowledge about the various microcontrollers presently available from a theoretical point of view. Once a learner goes through this course he will be equipped to migrate to any processor or controller in the industry with minimum transition time.
Learning Outcomes � Ability to choose and apply 8 bit and/or 32 bit controller for an embedded
solution. � Ability to interface microcontrollers through external circuit interface to a variety
of sensors and actuators. To reach the Learning outcome the following modules will be covered during the session
• Generic processing element and its organization • Processing element’s interfaces to
o Memory and timer o Real world – sensors and actuators o Communication – Wired and Wireless; Serial/Parallel o User interface – Keyboard, Mouse, Joystick etc.
• Architectural functionalities of the processing element o Instruction set o Addressing modes o Data representation
• Advanced Microcontroller architectures -Von – Neumann and Harvard Architecture, Instruction level Parallelism – CISC/RISC/VLIW
Introduction Introduction to generic Microprocessor/Microcontroller organization and architecture - Typical applications and understanding the hardware & software combination of computing system for diversified applications – Relevance and choice of processing elements for typical applications 8051 Microcontroller Intel MCS-51 family features –8051/8031-architecture – 8051 assembly language programming, addressing modes – Programming interrupts, counters and timers and serial communication, External Memory Interface – system design with 8051.

Evolution of CPU architecture Program execution time – Instruction execution time – Clock speed. Improving program execution time through instruction level parallelism CISC/RISC/VLIW architecture ARM processor core based microcontrollers(ATMEL) Processor organisation – instruction sets – addressing modes – Data representation – ARM Thumb instructions – ARM core based controller, organization and interfaces. Interfaces
� User interface • Real world interface � Communication interface
Typical application using the above controllers and comparison of performance based on application scenario References: 1) Tabak Daniel, Hintz Kenneth j., “Microcontrollers: Architecture implementation and Programming”, Tata McGraw Hill, 2007 2) Hennessy John L. and Patterson David A., “Computer organization and design: The Hardware/Software interface”, Elsevier, 3e 3) Kenneth J.Ayla, “The 8051 Micro controller”, Thomson learning, 3rd edition, 2004. 4) Mohammad Ali Mazidi, Janice Gillispie Mazidi “The 8051 Microcontroller and
Embedded Systems” Pearson education/ Prentice Hall of India Pvt. Ltd., 2003. 5) Douglas V. Hall, Microprocessors and interfacing: programming and hardware, Tata
McGraw Hill, 2e 6) Steve Furber, “ARM System-on-Chip Architecture (2nd Edition)”, Addison-Wesley, 2000. 7) Sloss Andrew N., Symes Dominic, Wright Chris, “ARM system developers guide: Designing and optimizing system software”, Morgan Kaufmann, 2008.
Microcontroller architechture and organization lab
The following experiments has to be done on both MCS51 family and ARM Processor Core based microcontroller
1. Acquire the signal from an input port and drive an output device. 2. Acquire the signal from different switches, process it and display. 3. Acquire input from any sensor, process the information using microcontroller and
switch on a relay. 4. Build a filter with cut off frequency and eliminate some frequency do a pattern
matching. If the pattern matches switch on the relay and if doesn’t glow an red LED.
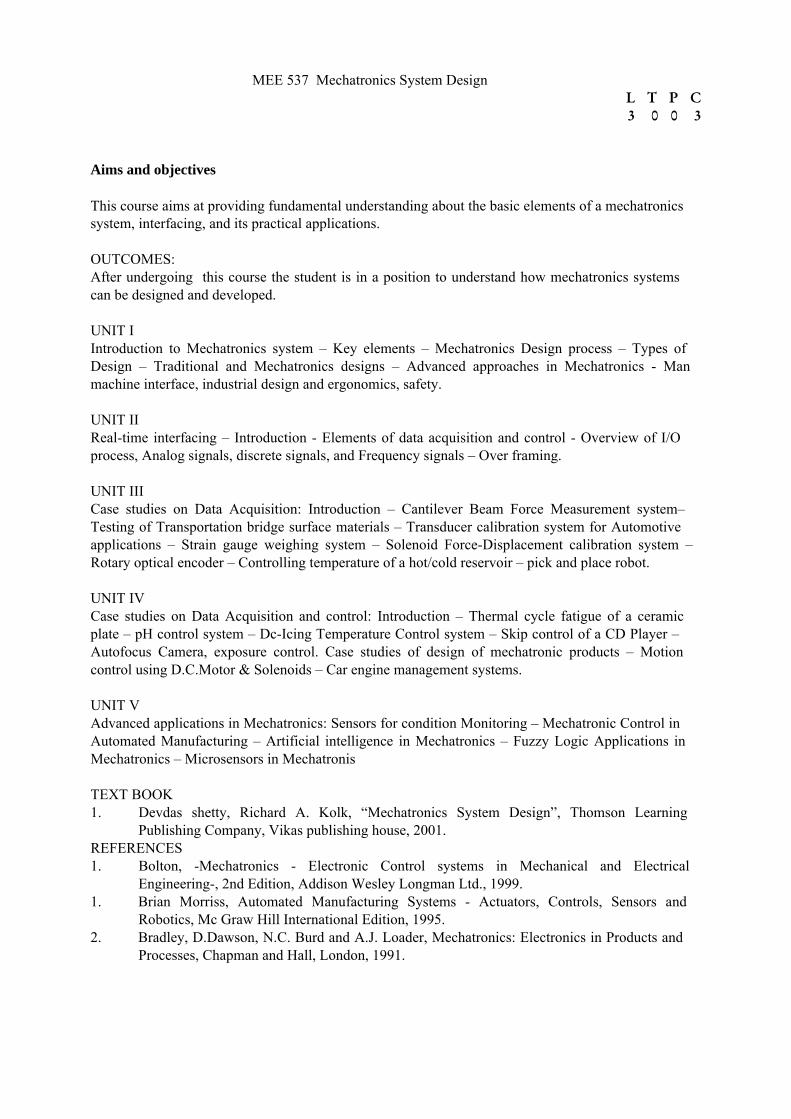
MEE 537 Mechatronics System Design L T P C
3 0 0 3 Aims and objectives This course aims at providing fundamental understanding about the basic elements of a mechatronicssystem, interfacing, and its practical applications. OUTCOMES: After undergoing this course the student is in a position to understand how mechatronics systems can be designed and developed. UNIT I Introduction to Mechatronics system – Key elements – Mechatronics Design process – Types of Design – Traditional and Mechatronics designs – Advanced approaches in Mechatronics - Man machine interface, industrial design and ergonomics, safety. UNIT II Real-time interfacing – Introduction - Elements of data acquisition and control - Overview of I/O process, Analog signals, discrete signals, and Frequency signals – Over framing. UNIT III Case studies on Data Acquisition: Introduction – Cantilever Beam Force Measurement system–Testing of Transportation bridge surface materials – Transducer calibration system for Automotive applications – Strain gauge weighing system – Solenoid Force-Displacement calibration system – Rotary optical encoder – Controlling temperature of a hot/cold reservoir – pick and place robot. UNIT IV Case studies on Data Acquisition and control: Introduction – Thermal cycle fatigue of a ceramic plate – pH control system – Dc-Icing Temperature Control system – Skip control of a CD Player – Autofocus Camera, exposure control. Case studies of design of mechatronic products – Motion control using D.C.Motor & Solenoids – Car engine management systems. UNIT V Advanced applications in Mechatronics: Sensors for condition Monitoring – Mechatronic Control in Automated Manufacturing – Artificial intelligence in Mechatronics – Fuzzy Logic Applications in Mechatronics – Microsensors in Mechatronis TEXT BOOK 1. Devdas shetty, Richard A. Kolk, “Mechatronics System Design”, Thomson Learning
Publishing Company, Vikas publishing house, 2001. REFERENCES 1. Bolton, -Mechatronics - Electronic Control systems in Mechanical and Electrical
Engineering-, 2nd Edition, Addison Wesley Longman Ltd., 1999. 1. Brian Morriss, Automated Manufacturing Systems - Actuators, Controls, Sensors and
Robotics, Mc Graw Hill International Edition, 1995. 2. Bradley, D.Dawson, N.C. Burd and A.J. Loader, Mechatronics: Electronics in Products and
Processes, Chapman and Hall, London, 1991.
EEE502 Advanced Sensor Systems and Instrumentation L T P C 3 0 2 4
Aims and objectives: This course is designed for postgraduate students to instill knowledge of advanced sensor systems and provide an application oriented approach in instrumentation. Learning Outcomes: On completion of this course the students will be able to Identify the most suitable method of sensing and transduction for an application design an instrumentation and associated data acquisition system UNIT – I Basic Concepts of Measurements and characteristics of an Instrumentation System: System configuration – Problem analysis – Basic characteristics of measuring devices – Calibration - Generalized measurements – Zero order, First order, Second order system – Dead time element. UNIT – II Sensors and Transducers – 1 : Electromechanical sensors – Resistance type – Potentiometer – Strain gauge – Resistance thermometer – RTD – Inductance type – Capacitance type – Piezo Electric type. UNIT – III Sensors and Transducers – 2 : Magnetic sensors – NMR – MRI – Fiber optic sensors – Opto electronic sensors – CCD - Digital transducers. UNIT – IV Analog and Digital Instrumentation : Operational Amplifiers – Signal generation – Signal processing – Filtering and signal analysis. UNIT – V Data Acquisition, Conversion, Transmission and Processing : Signal Conditioning of the inputs – Single channel and Multichannel data acquisition – Data conversion – Multiplexers – Sample and hold circuits – Data transmission systems – Pulse code formats – Modulation techniques – Telemetry system. References : 1. Nubert H.K.P, Instruments Transducers ,Clarenden prea, Oxford ,1988 2. C.S. Rangan, G.P. Sarma, V.S.V. Mani instrumentation devices and system, Tata McGraw Hill
1983. 3. Ernest . O. Doebelin ,Measurement System Application & Design McGraw Hill Book co IV
edition 1992 4. Oliver F.G Practical Instrument Transducers ,Pitman Publishing Co.,1971
EEE502 Advanced Sensor Systems and Instrumentation Laboratory
Aim and Objective:
To demonstrate a working knowledge of the theoretical basis for operation of digital instruments
and associated equipment by analyzing practical problems dealing with the use of such instruments,
sensors, and equipments.
1. Measurement and Calibration of Displacement, Pressure, Temperature, Level, Flow,
Moisture and Force transducers.
2. Speed measurement and Control using tachometer and stroboscope.
3. Torque and Power measurement.
4. Strain measurement and calibration using Strain gauges.
5. Acoustics and Vibration Measurement and Analysis using Sound level Meter,
Microphones, Accelerometers and Software Tools.
6. Exercise on Instrumentation Amplifier and PID controllers.
7. Programming with Virtual Instrumentation tools.
8. Study on Data Acquisition System.

12
EEE 504 POWER ELECTRONICS & DRIVES L T P C 3 0 2 4
Aims and objectives: This course is meticulously designed for postgraduate students to bring about awareness of various power electronic devices and circuits for various control applications. Learning Outcomes: On completion of this course the students will be able to
design and control various drives and motors develop a real time controller for various process applications.
Unit I Introduction Introduction to power electronics – Power electronics versus linear electronics- review of thyristers – power FETS – turn on and off circuits – Microprocessor based firing circuits – series and parallel operation –protection circuits – design of snubber circuits – ratings and protection
Unit II Converters and inverters Analysis of half controlled and fully controlled converters – dual converters – Analysis of voltage source and current source – Current source and series converters
Unit III Industrial Motor Control Methods of controlling speed – Induction and DC Motor controls- use of Microcontroller for speed control – Feedback and Feed forward control – Step-up and step-down choppers - use of choppers - Frequency converters and cyclo converters
Unit IV Relays, Heat and Welding Electronic relays – operating principles – torque production types – induction and dielectric heating – effect of frequency power requirement – Resistance welding, principle and control – timing sequence Analysis and design of switched mode power supplies – UPS
Unit V Process Controllers Elements of process control – process characteristics – ON – OFF control – Proportional and Derivative control – electronic controllers – pneumatic controllers – temperature, flow and pressure control- voltage regulators – principle of digital control References: 1. R. Ralph Benediet and Nathan Weiner – Industrial electronics circuits and applications –
Prentice Hall of India New Delhi 2. P.C Sen , Principles of Electric Machines and Power electronics – John Wiley & Sons
Inc 2nd edition , 1997 3. Harrott , P Process Control – Tata McGraw Hill 1991 4. Joseph Vithayathil , Power electronics : Principle and Applications McGraw Hill 1st
edition 1995

13
POWER ELECTRONICS LAB
Exercises
1. SCR triggering using RC
2. SCR triggering using RC(half wave)
3. SCR triggering using RC(full wave)
4. SCR triggering circuit using UJT
5. Astable multivibrator firing circuit
6. Ac phase control using triac and diac.
7. Single phase half control bridge rectifier.
8. Single phase fully control bridge rectifier.
9. Series inverter.
10. Parallel inverter.
11. Comparator and zero crossing detector
12. Zero voltage switching
6
MEE528 FLUID POWER SYSTEM AND FACTORY AUTOMATION L T P C 3 0 2 4
Aims and objectives This course Provides comprehensive introduction to fluid power including both hydraulics and pneumatics. Learning OutcomesOn completion of this course the students will be able to acquire knowledge of the applications of fluid power in various engineering fields work with PLC and understand its application in industry. .
Unit I Introduction to Fluid Power Definition- Hydraulics Vs Pneumatics – ISO symbols-Application –Pascal’s Law-Transmission and multiplication of force-Basic properties of hydraulic fluids- static head pressure-pressure loss – Power- absolute pressure and Temperature- gas laws- vacuum-hydraulic power supply source- pneumatic power supply source.
Unit II Control Components and Basic Circuits Cylinders-accumulators –FRL-Directional control Valves- Pressure control valves-Flow control Valves-electronic control components- DCV controlling single acting, double acting cylinder-counter balance circuit-Fail safe circuit-AND and OR valve circuit-regenerative circuit-meter in and meter out circuit-pressure intensifier circuit-accumulator circuits etc. Unit III Design of Fluid power circuit Design method consideration for sequential circuits-intuitive circuit design method-cascade method- sequential logic circuit design using KV method- compound circuit design-step counter design
Unit IV Factory Automation Introduction- automation principle and strategies-basic elements of an automated system-advanced automation function-levels of automation-automation and control techniques- continuous Vs discrete control- introduction to control component using PLC Unit V Programmable Logic controller: Introduction-architecture-hardware components-Basics of PLC programming-programming timers-programming counters-master and jump controls-Data manipulation instructions References:
1. James L.Johnson, Introduction to Fluid power ,Delmar Thomson Learning inc,2003 2. Antony Esposito, Fluid power system and control, Prentice hall, 1988 3. Hydraulic systems Hand book, utility Publications Ltd., Secunderabad, 1988 4. Peter Rohner, Fluid power logic circuit design, The Macmillan press 1979 5. M.P Groover, Automation production systems and cam – Prentice hall 1994 6. D. A. Bradley, D.Dawson, N.C. Burd, A.J. Loader, Mechatronics - Nelson Thrones,
2004

7
FLUID POWER SYSTEM AND FACTORY AUTOMATION LABORATORY Aim and Objective: The lab provides a hands-on training on Pneumatics, Hydraulics and PLC Kits List of exercises:
1. Design, development and analysis of pneumatic circuits using Automation studio /
Pneumosim software and Pneumatic trainers.
2. Design, development and analysis of hydraulic Circuits using Automation studio /
Hydrosim software and hydraulic trainers.
3. Automation and Electro-pneumatic / Electro-hydraulic control using PLC systems
(Allen Bradley, Siemens and Festo).
4. Study of Modular Automation Production System.
5. Development of MMI /HMI with PLC systems.
6. Study and Programming of Industrial Robot.

MEE 533 ROBOT DYNAMICS AND ANALYSIS
Aims & Objectives: Objective of the course is to introduce the students the principles of robotics. It includes simple problems in transformations, kinematics and inverse kinematics, dynamics, and control Expected Outcome: Upon completion of this course the student shall be able to: To solve more complex problems in robot kinematics, Dynamics and control To program industrial manipulators (KUKA, FANUC, RT100) online and offline for various operations. To design conceptually innovative robotic devices for industrial and socially relevant applications. Unit-I Introduction to Robotics Robot history, definitions, laws, Configuration, Specification and Safety measures – Robot subsystem components – Sensors and actuators -Types of actuator, types of sensor - End effectors and grippers design. Unit-II Kinematics Coordinate frames- Rotations and rigid-body transformations- Homogeneous transformations -D-H conventions - Forward kinematics- Inverse kinematics - position, velocity and acceleration analysis – Applications – Three axis robot arms – three axis wrist – Six axis robot manipulator. Unit-III Dynamics Effects of External Forces- Force and velocity transformations - Forward and Inverse Dynamics Problem - Derivation of Dynamic Equations - Lagrangian dynamics - Recursive Newton-Euler dynamics – Applications – four bar mechanism. Unit-IV Motion Planning and control Trajectory interpolation – trajectory planning – obstacle avoidance - control of robot system Equilibrium and stability of robotic systems - Set-point tracking – Feed forward control – Computed torque - Force control - Robustness, Estimation, and Control Actuation. Unit-V Sensing, programming and Applications Sensing - Vision systems, image acquisition, sampling and quantization, sampling theorem, image processing techniques, image analysis, real-time image processing. Programming - operating systems, real-time requirements, parallel processing, event detection. Real-World Problems –Computer Graphics - Modular Robots, Mobile Robots, Redundant-Parallel Robots and Dual-arm Robots. Text Book: Yorem Koren., “Robotics for engineers”, McRaw Hill International Edition 1998. Reference Books: Richard D. Klafter, Thomas. A., “Robotic engineering an integral approach”., Prentice Hall of India, New Delhi – 1994. 2. John J. Craig, Introduction to Robotics (Mechanics and Control, 2nd edition, 1992.
L T P C2 1 2 4
3. K.S. Fu, R.C. Gonzalez, and C.S.G. Lee, "Robotics: Control, Sensing, Vision, and Intelligence", McGraw-Hill, 1991. 4. T. Yoshikawa, "Foundations of Robotics: Analysis and Control", MIT Press, Cambridge, 1992. 5. George N. Sander., Arther. G. Erdman., Advanced mechanism design, analysis and synthesis Prentice Hall of India – 1998.
ROBOT DYNAMICS AND ANALYSIS LAB
1. Study of the following:
a) Point-to-Point pneumatic robot
b) M-TAB Minibot
c) MAKIT Mechanisms developer’s kit
d) SciLab and MATLAB
e) Sensors and Actuators used in industrial robotic systems
f) Ottobock robotic prosthetic hand
2. Programming and operation of UMI RT-100 SCARA Semi-Industrial
Manipulator
3. Programming and operation of KUKA KR6 Industrial Manipulator
4. Programming and operation of FANUC 6MiB Industrial Manipulator
5. Offline programming and simulation
a) KUKA SIM PRO and SIM LAYOUT
b) Fanuc ROBOGUIDE
6. Robot design and programming using LEGO Mindstorms
7. Robot design and programming using Robix RCS
8. Virtual robot simulation using MicroSoft Robotics Studio
9. Derivation and simulation of equation of motion of a robotic system using:
a) Matlab ODE solvers
b) MATLAB Simulink
c) Use of RADAU5 Solver.
10. Virtual simulation and control of manipulators and innovative robot designs using
MSC.ADAMS Controls with MATLAB.
References 1. Manuals for KUKA and FANUC Manipulators and related websites 2. Manuals and websites for the creative robot kits: LEGO, Robix, MAKIT 3. Manuals for MSC.ADAMS and MATLAB
MEE536 Micro Electro-mechanical Systems L T P C
Aims & Objectives: • This course enables understanding the concept of MEMS and Microsystems. Helps to
understand the diverse technological and functional approaches and applications and provides an insight of micro sensors, actuators and micro fluidics.
Expected Outcome:
On completion of the course, the students will be able to
• Become familiar with micro fabrication techniques • Assess whether using a MEMS based solution is the relevant and best approach • Select the most suitable manufacturing process and strategies for micro fabrication
Unit-I Foundation in Microsystems Review of microelectronics manufacture and introduction to MEMS- Overview of microsystems technology, Laws of scaling- The multi disciplinary nature of MEMS- Survey of materials central to micro engineering- Applications of MEMS in various industries
Unit-II Micro Manufacturing Techniques Photolithography- Film deposition, Etching Processes-Bulk micro machining, silicon surface micro machining- LIGA process-Rapid micro product development.
Unit-III Micro Sensors and Micro Actuators Energy conversion and force generation-Electromagnetic Actuators, Reluctance motors, piezoelectric actuators, bi-metal-actuator Friction and wear -Transducer principles, Signal detection and signal processing-Mechanical and physical sensors-Acceleration sensor, pressure sensor, Sensor arrays.
Unit-IV Introduction to Micro/Nano Fluids Fundamentals of micro fluidics- Micro pump – introduction – Types - Mechanical Micro pump – Non mechanical micro pumps, Actuating Principles, Design rules for micro pump – modeling and simulation, Verification and testing -Applications
Unit-V Microsystem Design and Packaging Design considerations-Mechanical Design, Process design, Realization of MEMS components using Intellisuite. Micro system packaging-Packing Technologies-Assembly of Microsystems- Reliability in MEMS
Text Book: Maluf, Nadim “An introduction to Micro Electro-mechanical Systems Engineering “AR Tech house, Boston 2000.
Reference Books:
1. Mohamed Gad – el – Hak “MEMS Handbook” Edited CRC Press 2002 2. Sabrie solomon “Sensors Handbook”, Mc Graw Hill 1998 3. Marc F madou “ Fundamentals of micro fabrication” CRC Press 2002 2nd Edition 4. Francis E.H Tay and W. O. Choong “Micro fluidics and bio MEMS application” IEEE Press
New York 1997 5. Trimmer William S “Micromachanics and MEMS”, IEEE Press New York 1997

Program Electives

EEE 503 Embedded Sensors and System Design L T P C
3 0 0 3 Aims & Objectives: • To allow the student to study the design and development process for dedicated computer
systems in relation to environment in which they operate Expected Outcome: Upon completion of this course the student shall be able to:
• Understand and to apply a design methodology for dedicated computer-based System • Appreciate the considerations of design-specification , technological choice, the
Development, maintenance, extensibility and also the importance of extensibility and also the importance of electromagnetic compatibility
• Comprehend the fundamental building blocks of such systems (sensors, actuators, Signal- conditioning electronics, processors, interfaces AND SOFTWARE DESIGN & Construction techniques) and their inter-relationships
• To demonstrate practical competence in these areas
Contents: Introduction Embedded computing - characteristics of embedded computing applications - Embedded system design challenges- constraint - driven - IP - based design - hardware- software co-design
Development Environment The Execution Environment - Memory Organization - System Space- Code space - data space - Unpopulated Memory Space - I\P Space- system Start-up- Interrupt Response Cycle - Function CALLS AND Stack Frames - Run - Time Environment - Object Placement.
Embedded Computing Platform CPU bus - memory devices - I\O devices- component interfacing- designing with microprocessors - development and debugging - design example- Design patterns - dataflow graphs - assembly and linking - basic compilation techniques - analysis and optimization
Distributed Embedded System Design Inter- process communication - signals - signals in UML - shared memory communication - accelerated design - design for video accelerator - networks for embedded systems - networks based design - Internet enabled systems
Design Techniques Design methodologies and tools - design flows - designing hardware and software components - requirement analysis and specification - system analysis and architecture design - system integration- structural and behavioral description- case studies.
Text Book: Wayne Wolf, "Computers as Components, Principles of Embedded Computer Systems Design", Morgan Kaufman publishers, 1999.
Reference Books:
1. Jean J. Labrosse, "Embedded system Building blocks; complete and ready-to-use modules in C", 1997.
2. Arnold S.Berger, "Embedded Systems Design; an Introduction to Processes, Tools and Techniques", 1992.
MEE 611 Design of Hydraulic and Pneumatic Systems L T P C 3 0 0 3
Aims and objectives
• To provide fundamentals of Hydraulic and Pneumatic systems
• To design simple Hydraulic and Pneumatic circuits.
• To propose and design special circuits for low cost automation. Expected Outcome:
Upon completion of this course the student shall be able to: • Have fundamental of fluid power control. • Design special circuits for low cost automation. Contents:
UNIT I Hydraulic Systems and Actuators
Basic principles-Hydraulic Principles. Hydraulic Power Generators - Selection and specification of pumps, pump characteristics. Hydraulic Actuators – Linear, Rotary - Selection –Characteristics.
UNIT II Control and Regulation Elements
Hydraulic Valves: Pressure, Flow, Direction Controls- Proportional Control valve. Fluid power symbols.
UNIT III Design of Hydraulic Circuits
Hydraulic circuits:- Reciprocating, Quick return , Sequencing, synchronizing and other industrial circuits like press circuits - hydraulic milling machine - grinding, planning, copying, forklift, earth mover circuits - design and selection of components - safety and emergency mandrels.
Design of Hydraulic circuits – Selection and sizing of components-calculation of frictional head loss-equivalent length for various components- actuator load calculation- pump sizing.
UNIT IV Pneumatic Systems and Circuits
Pneumatic system fundamentals: FRL, actuators and valves. Logic Circuits - Position - Pressure Sensing, switching, electro-pneumatic. Design of Pneumatic circuits using– Karnaugh maps. Cascade-Step counter.
UNIT V Installation, Maintenance and Special Circuits
Pneumatic equipments - selection of components - design calculations -application - fault finding – hydro pneumatic circuits - use of microprocessors for sequencing - PLC, Low cost automation - Robotic circuits. Text Book:
1. S. R. Majumdar, “Oil hydraulics and Pneumatics”, Tata McGraw Hill, 2003. 2. W. Bolton “Pneumatic and hydraulic systems”, Butterworth Heinemann, 1997.
Reference Books:
1. Anthony Esposite, “Fluid Power with Applications”, Pearson Education,2000. 2. J. Michael, Pinches and John G Ashby, “Power Hydraulics”, Prentice Hall, 1989. 3. Andrew Parr, “Hydraulics and Pneumatics”, Jaico, 1999. 4. Dudleyt A Pease and John J Pippenger, “Basic Fluid Power” , Prentice Hall, 1987. Web References: 1. www.pneumatics.com 2. www.fluidpower.com.tw

MEE 609 Computational Techniques for Vibration Analysis and Control
L T P C 2 1 2 4
Course Objectives: To develop comprehensive knowledge in the fundamental mathematical and physical
basis of finite element methods. To know how to build FEM models of physical problems exposed to vibration and
apply appropriate constraints and boundary conditions. To develop and exercise critical thinking in interpreting results from FEM analysis such
as the ability to identify the mode shapes, stress contours, eigen frequency as well as response characteristics.
To connect the disciplines of vibration and control on a firm mathematical basis, and study vibration control problems using MATLAB software.
Expected Outcome Upon completion of the course work, the students will be able to develop a complete FEM solution strategy for vibration and control of mechanical and structural systems. Unit I: Introduction Review of vibration analysis of one, two, multi-degrees of freedom and continuous systems- Formulation of equations of motion: Hamilton’s principle, Lagrange’s equation. Development of finite element energy functions: Axial and torque elements, beam and plate bending elements, membrane element-three dimensional solids-axisymmetric solid- Development of equations of motion and boundary conditions. Unit II: Finite element displacement method Rayleigh-Ritz method-Axial vibration of bars Torsional vibration of shafts- Bending vibration of beams- Vibration of trusses and frames -Inclusion of shear deformation and rotary inertia effects. Unit III: In-plane and flexural vibration of plates In-plane vibration of plates: Linear triangular element-Linear rectangular element- Linear quadrilateral element- Area coordinates for triangles- Linear triangle in area coordinates. Flexural vibration plates: rectangular and triangular elements- conforming and non-conforming elements. Unit IV: Analysis of free and forced vibration Eigen value and eigen vectors- orthogonality of eigen vector- Jacobi, LR, QR and QL methods- reduction of number of degrees of freedom- Calculation of eigen values and eigen vectors for the physical systems: Bisection/inverse iteration and Lanczos’s methods-computation using MATLAB Forced response: Modal analysis- representation of damping: structural and viscous damping- steady state response to harmonic and periodic excitation- transient response- response to random excitation: response of single degree-freedom, direct and modal response of multi-degree of freedom system-simulation using MATLAB Unit V: Control of flexible structures Control systems- stability theory-stability of multi-degrees of freedom systems-analysis of second order system-state space form representation-transfer function analysis-control law

design for state space system-linear quadratic regulator-modal control for second order systems-dynamic observer-MATLAB commands for control calculations. References:
1. M. Petyt, Introduction to finite element vibration analysis, Cambridge University Press, 2010.
2. S.S.Rao, The finite element method in enginnering, Pergamon Press, 2004. 3. J.N.Reddy, An introduction to finite element method, McGraw Hill, 1993. 4. W.T.Thomson and M.D.Dahleh, Theory of vibration with applications, Prentice Hall,
1998. 5. S.S.Rao, Mechanical vibration, Prentice Hall, 2003. 6. S.G. Kelly, Theory and problems of mechanical vibrations, McGraw Hill, 1993. 7. R.C. Dorf and R.H. Bishop, Modern control system, Pearson Prentice Hall, 2008. 8. K.Ogata, Modern control engineering, Prentice Hall, 2007.
Lab exercises: Case studies:
1. Computation of natural frequencies and numerical simulation of time and frequency responses of various uniform flexible structures in MATLAB.
2. Computation of natural frequencies and numerical simulation of time and frequency responses of various tapered flexible structures in MATLAB.
3. Development of dynamic model, the governing equation of motion and adaptive vibration control of the micro-cantilever beams based MEMS with piezoelectric actuator (PZT).
4. Modeling and simulation of dynamic response of microaccelerometer.
MEE 607 REAL TIME SYSTEMS AND SOFTWARE DEVELOPMENT
L T P C 3 0 0 3 aAims and objectives 1. To provide a foundation on concept of real-time systems. 2. To understand the techniques of software development. 3. To understand the techniques of connectivity. Outcome Student will be able to 1. Understand the concepts of embedded computing 2. Analyse the real-time system requirements 3. Understand the connectivity technologies Unit I Introduction 7 Real Time Systems - Embedded Systems - Pervasive Computing - Information Access Devices - Smart Cards -Embedded Controllers - Hardware Fundamentals. Unit II RTOS 7 Real Time Operating Systems - Memory Management - Processes, Threads, Interrupts, Events - User Interface. Unit III REAL TIME UML 7 Requirements Analysis - Object Identification strategies - Object Behavior - Real-Time Design Patterns Unit IV SOFTWARE DEVELOPMENT 7 Concurrency - Exceptions - Tools - Debugging Techniques - Optimization - Case Studies. Unit V CONNECTIVITY 7 Wireless Connectivity - Blue Tooth - Other Short Range Protocols - Wireless Application Environment – Service Discovery – Middleware.
Text books
Philip A.Laplante, “Real time system design and analysis – an engineer's handbook,
John Wiley- India Edition, 2006.
REFERENCES 1. R.J.A. Buhr, D.L.Bailey, " An Introduction to Real-Time Systems ", Prentice-Hall International, 1999. 2. B.P.Douglass, " Real-Time UML 2nd Edition ", Addison-Wesley, 2000. 3. D.E. Simon, " An Embedded Software Primer ", Addison-Wesley, 1999. 4. J.Schiller, " Mobile Communications ", Addison-Wesley, 2000. 5. V.Hansmann, L.Merk, M.S. Nicklous, T.Stober, " Prevasive Computing Handbook ", Springer, 2001.

MEE607RELIABILITY ENGINEERING L T P C
3 0 0 3 Aims and objectives:
• To equip the students to analyze reliability data. • To introduce the concepts of reliability and useful life availability of products. • To impart knowledge on maintainability and availability analyses of products.
Expected Outcome: On completion of this course, the student shall be able to acquire good knowledge on reliability of products through the failure concepts, failure distributions, Serial & parallel systems and their risk assessment. Contents:
UNIT I Reliability Concept
Reliability function - failure rate - Mean Time Between Failures (MTBF) - Mean Time to Failure (MTTF) - a priori and a posteriori concept - mortality curve - useful life availability - maintainability - system effectiveness.
UNIT II Reliability Data Analysis
Time-to-failure distributions - Exponential, normal, Gamma, Weibull, ranking of data - probability plotting techniques - Hazard plotting.
UNIT III Reliability Prediction Models
Series and parallel systems - RBD approach - Standby systems - m/n configuration - Application of Baye's theorem - cut and tie set method - Markov analysis - FTA - Limitations.
UNIT IV Reliability Management
Reliability testing - Reliability growth monitoring - Non parametric methods - Reliability and life cycle costs - Reliability allocation - Replacement model.
UNIT V Risk Assessment
Definition and measurement of risk - risk analysis techniques - risk reduction resources - industrial safety and risk assesment. Reference Books:
1. Modarres, " Reliability and Risk analysis ", Mara Dekker Inc., 1993. 2. John Davidson, “The Reliability of Mechanical system ", Institution of Mechanical Engineers, London,
1988. 3. C.O. Smith" Introduction to Reliability in Design ", McGraw Hill, London, 1976.

MEE556 SYSTEM MODELING AND SIMULATION L T P C 3 0 0 3 Aims and objectives 1. To provide a strong foundation on concept of simulation, and modeling. 2. To understand the techniques of random number generations and testing randomness. 3. To introduce simulation languages
Outcome Student will be able to 1. understand the concept of modelling and simulation 2. practice on simulation tools and impart knowledge on building simulation systems 3. design simulation models for various applications
Unit I INTRODUCTION 7 Systems, modeling, general systems theory, Concept of simulation, Simulation as a decision making tool, types of simulation, Modeling & Simulation of Physical systems. System Models: Mathematical models:- mechanical system building blocks, electrical system building blocks, thermal system building blocks, electromechanical systems, hydro-mechanical systems, pneumatic systems. Unit II RANDOM NUMBERS 7 Pseudo random numbers, methods of generating random variables, discrete and continuous distributions, testing of random numbers. Unit III DESIGN OF SIMULATION EXPERIMENTS 7 Problem formulation, data collection and reduction, time flow mechanism, key variables, logic flow chart, starting condition, run size, experimental design consideration, output analysis and interpretation validation. Unit IV SIMULATION LANGUAGES 7 Comparison and selection of simulation languages, study of anyone simulation language. Modeling Electromechanical Systems, Modeling of Mechanical Systems for Mechatronics Applications Unit V CASE STUDIES 7 Development of simulation models using simulation language studied for systems like queuing systems, Production systems, Inventory systems, maintenance and replacement systems, Industrial automation, Industrial robots, Mobile and autonomous robots, Automotive, Mechatronic consumer products and Investment analysis.
Total no. of Hours: 35
TEXT BOOKS 1. Geoffrey Gordon, “System Simulation”, 2nd Edition, Prentice Hall, India, 2002. 2. Narsingh Deo, “System Simulation with Digital Computer, “Prentice Hall, India, 2001. REFERENCES 1. Jerry Banks and John S. Carson, Barry L. Nelson, David M.Nicol, “Discrete Event System Simulation”, 3rd Edition, Prentice Hall, India, 2002. 2. Shannon, R.E. “Systems simulation”, Prentice Hall, 1998. 3. Thomas J. Schriber, Simulation using GPSS, John Wiley, 1991. 4. Karnopp, D., Margolis, D. and Rosenberg, R., System Dynamics: Modeling and Simulation of Mechatronic Systems, Third Edition, Wiley Interscience, 2000.
MEE 554 ELECTRO-OPTIC SYSTEMS L T P C 3 0 0 3 Aims & Objectives: • This course is mainly focused on comprehensive introduction to field of optics includes laser
physics, holographic and non-destructive optical measurement and range sensing. Expected Outcome: Upon completion of this course the student shall be able to: • Understand the fundamental physics of electro-magnetic waves such as laser and the
implementation of laser and holography technology • Understand the optical cable communication in industrial environment
Contents: Introduction Electro-magnetic spectrum, Laws of blackbody radiation. Atmospheric propagation characteristics. Detectors and optical materials. Aircraft applications of Electro-optic sensors and systems.
Infrared Systems Description, Analysis and design features of typical passive search and detection, imaging-Tracking and Homing systems.
Laser Systems Theory of laser operation –Optical resonators – Temporal and spatial Coherence. Introduction to gas, solid and semiconductor lasers. Modulators –Electro –Optic, Magneto-optic, Acoustics-optic, Q-switching, mode locking – cavity dumping. Introduction to gas, solid and semiconductor lasers. Introduction to holography and laser gyro. Description analysis and design features of lasers ranging designation and guidance systems. Laser hazards and safety measures.
Fibre-Optics Types of Fibre optic cables and their characteristics, Fiber-optic elements, Applications in communication, networks and sensors, Fiber-optic gyroscopes.
Imaging Devices and Tracking Systems
Imaging tubes (vidicons, pyroelectric vidicons etc.) Image Intensifier Tubes, CCDs, Focal Plane Array (FPA).
Introduction to optical tracking, Sensor steering and stabilisation concepts, Servo-control aspects. Pulsed laser and gated video trackers. Text Book: William L. Wolfe and George J. Zissis (Ed.), “Infrared Handbook”, office of Naval Research, Dept. of the Navy Washington, DC, 1988.
Reference Books: 1. Watson, J. “Optoelectronics”, Van Nostrand Reinheld (UK) Co. Ltd., U.K.1988. 2. Robert G. Seippel, “Opto-electronics for technology and Engineering” Prentice-Hall, New
Jersey, 1989.
MEE534 Machine Vision System L T P C
3 0 0 3 Aim and Objectives To educate and train students in fundamental and advance concepts of machine vision system and also train the students in design and development of machine vision applications for industrial applications. Learning Outcomes: On completion of this course the students will be: - Proficient in fundamentals of machine vision systems, software / hardware components, lighting systems and Image analysis. - Apply machine vision concepts to electronic, manufacturing, aeronautics, automobile, food, chemical, Pharmacy and Packaging Industries. Unit – I Fundamental Concepts Vision system – human vision, disadvantages - machine vision, advantages – components and working principles of MVS - fundamental of Imaging – MVS specifications – design requirements – Human machine interfaces – MVS Integration of Mechanical, Electrical, Optical, Software, Mechatronics engineering. Unit – II Hardware Components Machine Vision Vs Closed circuit television (CCTV) MVS Camera– Analog , Digital - CID , CCD, CMOS, HAD, - line scan, progressive scan , Monochromatic & Colour image – camera calibration - Frame grabber , A/D converter , Gain , manual & auto shutter, camera noise – Optics –lateral magnification entrocentric & telecentric perspective - Image acquisition & Image coordinate system. Unit – III Lighting system Importance of Illumination – Light and light perception - light characteristics –Light sources – monochromatic light, white light, UV, IR LED and Laser – polarized lighting , filtered lighting - types of illuminators – illumination techniques factors to be considered in design of Lighting of a MVS Unit – IV Image Analysis and Image Processing Introduction to digital images – Image analysis –Basic, scalar, arithmetic - Image enhancement – Thresholding ,Histogram , line profile , intensity measurement – Image processing – lookup tables(LUT), Morphology , spatial filters, Frequency domain processing - Blob analysis, Particle measurement, Dimension measurement – Edge detection , alignment, Pattern matching. Unit – V Software & Applications - Case studies Selection of Machine Vision Software – Various MVS Software’s - Case studies Application of MVS – electronic ,Manufacturing, automobile Industries Food and Chemical , Pharmacy , Packaging Industries - Research and Aeronautics . References:
1. Harley R . Myler , Fundamentals of Machine Vision , Prentice - Hall 2. Louis J Galbiati , Image Processing Fundamentals, Prentice - Hall 3. Ramesh Jain et.al, Machine Vision, McGraw-Hill 4. Milan sonka et.al , Image Processing Analysis and Machine Vision,Vikas Publisher
5. G.J.Awcock & R. Thomas Applied Image Processing , Macmillan 6. Alexander Hornberg , Handbook on Machine Vision , Wiley – VCH , 2008
22
MEE529 AUTOTRONICS AND VEHICLE INTELLIGENCE
L T P C 3 0 0 3
Aims & objectives: This course provides comprehensive introduction to basic automotive engineering to modern automotive engineering technology. Learning Outcomes: On completion of this course the students will be able to
understand the theoretical concepts of various sensors understand the concept of electric and hybrid vehicle
Unit-I Automotive fundamentals The engine-components-Drive train -Starting &charging systems operation- Ignition system- Suspension systems-brakes -ABS - Steering system Unit-II Automotive sensors Temperature sensor-gas sensor-knock sensor-pressure sensor - flow sensor-torque sensor-crash sensor-Speed sensor and acceleration sensor-micro sensor-smart sensor-operation, types, characteristics, advantages and their applications. Unit-III Fuel injection and Ignition system Introduction -fuel system components-electronic fuel system-fuel injection-types-throttle body versus port injection-electronic control fuel injection-operation-different types-fuel injectors-idle speed control-continuos injection system-high pressure diesel fuel injection -MPFI system -Electronic ignition system-operation-types-Electronic spark timing control. Unit-IV Electric vehicles and hybrid vehicles Introduction-Electric Vehicle development- system layout- basic system components-Electric battery-solar cells-rapid charging system-motor drive system-fuelcell Electric vehicle-hybrid vehicle-series Hybrid Vehicle -parallel Hybrid Vehicle-CNG Electric hybrid vehicle. Unit-V Vehicle Intelligence Introduction -basic structure-vision based autonomous road vehicles-architecture for dynamic vision system -features-applications- A visual control system using image processing and fuzzy theory-An application of mobile robot vision to a vehicle information system.-object detection, collision warning and Avoidance system-low tyre pressure warning system. References:
1.Willium B. Ribbens, Understanding Automotive Electronics - Sixth edition Elsevier Science 2003 2. Ronald K.Jurgen, Sensors and Transducers - SAE 2003 3. Jack Erjavec, Robert Scharff, Automotive Technology - Delmar publications Inc 1992 4. Ronald K.Jurgen, Electric and Hybrid-electric vehicles - SAE 2002 6.Jay Webster, Class Room Manual For Automotive Service And System - Delmer Publications Inc 1995 7. Ron Hodkinson, John Fenton, Light Weight Electric/Hybrid Vehicle Design - Read Educational and Professional Publications Ltd. 2001
Subject Code: MEE505 Title : Vehicle Dynamics L T P C 3 1 0 4
Aim and objectives 1. Understand vibrating systems and its analysis, modeling and simulation and modal analysis
2. Understand various Suspension systems, selection of springs and dampers
3. Understand the stability of vehicles on curved track and slope, gyroscopic effects and cross wind handling
4. Know about tyres, ride characteristics and effect of camber, camber thrust
5. Learn about vehicle handling under different steering conditions and directional stability of vehicles
Expected Outcome
Upon completion of this course the student will be able to: 1. Understand and analyze the various dynamic aspects of the vehicle
Unit 1 Introduction
Classification of vibration, definitions, mechanical, vibrating systems, mechanical vibration and human comfort. Modelling and simulation studies. Model of an automobile, one degree of freedom, two degree of freedom systems, free, forced and damped vibrations - Random vibration - Magnification and Transmissibility. Vibration absorber. Multidegree of Freedom Systems-Closed and far coupled system, Orthogonality of modal shapes, Modal analysis. Unit 2 Suspension Requirements. Spring mass frequency. Wheel hop, wheel wobble, wheel shimmy, Choice of suspension spring rate. Calculation of effective spring rate. Vehicle suspension in fore and aft directions. Hydraulic dampers and choice of damper characteristics. Independent, compensated, rubber and air suspension systems. Roll axis and vehicle under the action of side forces. Unit 3 Stability of Vehicles Load distribution. Stability on a curved track and on a slope. Gyroscopic effects, weight transfer during acceleration and braking, over turning and sliding. Rigid vehicle – stability and equations of motion. Cross wind handling. Unit 4 Tyres Types. Relative merits and demerits. Ride characteristics. Behaviour while cornering, slip angle, cornering force, power consumed by a tyre. Effect of camber, camber thrust. Unit 5 Vehicle Handling Over steer, under steer, steady state cornering. Effect of braking, driving torques on steering. Effect of camber, transient effects in cornering. Directional stability of vehicles. Text Books Reference Books
1. Thomas D.Gillespie, Fundamentals of vehicle dynamics,SAE,1992 2. J.G. Giles, ‘Steering, Suspension and Tyres, Illiffe Books Ltd., 1968. 3. J. Y. Wong, ‘Theory of Ground Vehicles’, John Wiley and Sons Inc., New York, 2001.

MEE535 FUZZY LOGIC AND NEURAL NETWORKS
Aims & Objectives: L-T-P-C: 3 – 0 – 0 -3
• The course is mainly focused on robust non linear control and higher degree automation system to
expose student in the fundamentals of fuzzy logic and neural network and their engineering
applications
Expected Outcome:
Upon completion of this course the student shall be able to:
• Understand fundamental of fuzzy approaches
• Understand fuzzy linguistic descriptions and their analytical forms
• Understand the feature of Neural Networks, types of activation function and its classifications
Contents:
Fuzzy Set Theory and Fuzzy Logic Control:
Basic concepts of fuzzy sets – Operations on fuzzy sets –Fuzzy relation equations – Fuzzy logic
control – Fuzzification – Defuzzification – Knowledge base – Decision making logic – Membership
functions – Rule base.
Adaptive Fuzzy Systems:
Performance index – Modification of rule base – Modification of member ship functions –
simultaneous modification of rule base and membership functions – Genetic algorithms – Adaptive
fuzzy system- Neuro fuzzy systems.
Artificial Neural Networks:
Introduction – history of neural networks – multilayer perceptrons –Back propagation algorithm and its
variants – Different types of learning, examples
Mapping and Recurrent Net Works:
Counter propagation – Self organisation Map – Cognitron and Neocognitron - Hopfield Net- kohonnen
Nets- Grossberg Nets- Art-I, Art-II reinforcement learning
Case Studies:
Application of fuzzy logic and Neural network to Measurement- control – Adaptive Neural controllers
– Signal processing and Image processing.
Text Book:
Vallum B.R and Hayagriva V.R C++, Neural networks and Fuzzy logic , BPB Publications , New
Delhi , 1996
Reference Books:
1. Millon W.T , Sutton R.S and Werbos P.J, Neural Networks for control MIT Press 1992
2. Klir ,G.J and Yuan B.B Fuzzy sets and Fuzzy logic , Prentice Hall of India Pvt. Ltd. ,, New Delhi
1997
3. Kosko. Neural Networks and Fuzzy systems,. Prentice hall of India Pvt. Ltd. New Delhi 1994
4. Dirankov D. Hellendoorn H, Reinfrank M ,.Introduction to Fuzzy control , Narosa Publishing
House .. New Delhi 1996
5. Zurada J.M Introduction to Artificial Neural Systems Jaico Publishing House , New Delhi 1994

IT 507 DATA TRANSMISSION AND COMPUTER NETWORKING
L T P C
3 0 0 3 Aim and objectives To serve as a refresher and/or foundation course on Data Communication and Computer Networking.
Outcome Student will be able to 1. To understand and explain the fundamental principles of networking. 2. Compare and contrast various networking topologies, communications devices and
services. 3. get an exposure to advanced and emerging technologies
Unit I INTRODUCTION – COMPUTER NETWORKS AND OPEN SYSTEMS STANDARDS
6
Introduction and importance of communication systems, Computer networks, Standards and standards organizations, Open systems and the OSI model.
Unit II TRANSMISSION FUNDAMENTALS 7 Communication media, Communication services and devices, Codes, Analog and Digital signals, Modulation and Demodulation, Modem standards. Multiplexing, Error Detection and Correction, Data Link control and protocol.
Unit III TYPES OF NETWORKS AND ROUTING ALGORITHMS 8 Local area networks, High-speed and Bridged local area networks, Wide area networks, Internet working devices, Repeaters, Bridges, Routers, Gateways routing algorithms, Distance vector routing, Link state routing.
Unit IV INTERNETWORKING 7 Inter-network architectures and issues, Network layer structure, Internet protocol standards, Internet, IP, IPV6, The ISO Internet protocol, ISO Routing protocols.
Unit V BROADBAND MULTI-SERVICE NETWORKS 7 Networking requirements, FDDI – II, Cell-based networks, Wireless LANs, CDMA, TCP/IP, Congestion control and Quality of Service, SMTP, HTTP, URL and WWW, Introduction to Asynchronous transfer mode (ATM)
Total no. of Hours: 35
Reference Books 1. Behrouz A. Forouzan, “Data Communications and Networking”, Tata Mcgraw Hill, 2005. 2. Fred Halsall, “Data Communications, Computer Networks and Open systems”, Pearson Education, 2005. 3. Brijendra Singh, “Data Communication and Computer Networks”, Prentice Hall of India, Delhi, 2004.

EEE 562 Sensor Networks L T P C 3 0 0 3
Aim and objectives: • To teach the basic and advanced concepts in sensor networking architectures and
protocols. • To expose the students to the recent advances in various wireless networks. Learning Outcomes: • The students will be able to understand the fundamentals and basic features of
wireless sensor networking.
Introduction Advantages of Sensor Networks, Habitat Monitoring, Tracking Chemical Plumes, Smart transportation, Collaborative Processing Localization and Tracking Collaborative Localization, Bayesian state estimation, State space decomposition, data association, Sensor models Networking Sensors Medium access control – the S-MAC protocol, IEEE 802.15.4 Standard and ZigBee, Energy aware routing – Unicast geographic routing, routing on a curve, energy minimizing broadcast, energy aware routing to a region, Attribute based routing – directed diffusion, rumor routing, geographic hash tables. Sensor Tasking and Control Task driven sensing, roles of sensor nodes and utilities, information based sensor tasking – IDSQ, cluster leader based protocol, sensor tasking in tracking relations, joint routing and information aggregation – multi step information directed routing, sensor group management. Sensor Network Databases Query interfaces, High level database organization, In-Network aggregation, data-centric storage, data indices and range queries, distributes hierarchical aggregation, temporal data Wireless Sensor Networking Introduction, characteristics, applications, technical challenges and design directions.
Local area networks: Ethernet and WLAN.
Reference books: 1. Wireless Sensor Networks, Feng Zhao, Leonidas. J.Guibas, Morgan Kaufamann
Publishers 2000 2. Introduction to wireless and mobile systems, Dharma Prakash Agarwal, Quing-
AnZeng, Vikas Publishing House. 3. Handbook of Sensor Networks: Algorithms and Architectures, Ivan Stojmenovi &
Cacute, October 2005. 4. William Stallings, “Wireless Communications and Networks”, Prentice Hall, 2000

34
EEE505 DIGITAL CONTROL SYSTEMS
Aims & Objectives:
• To provide theoretical and practical knowledge on Digital Control Systems, their components, and
their design & analysis methods.
Expected Outcome:
Upon completion of this course the student shall be able to:
• Know the importance of digital control systems
• Solve problems using z-transform, inverse z- transform techniques.
• Know the advantage of state variable technique, controllability, observability for effective design
of controller using digital technique.
Contents:
Introduction
Sampling and holding – Sample and hold device D/A, A/D conversion – Z transform – Inverse Z
transform – properties – Pulse transfer function and response between sampling intervals –
Reconstruction.
Variable Technique
State equations of discrete data systems – State transition equations – Relationship between state
equation and transfer functions - Characteristic equations – Eigen value – eigen vector –
Diagonalization of Matrix – Jordan canonical form – Methods of computing state transition matrix –
State diagram – Decomposition of discrete data transfer function.
Controllability, Observability and Stability
Controllability and observability of linier time invariant discrete data systems – Relationships between
controllability, observability and transfer function-Stability of linier discrete control system – Stability
tests – Bilinear transformation method – Jury’s stability test.
Design of Digital Control Systems
Correlation between time response and root locations in S plane and Z plane – Direct design in Z and
W plane – State space design – Design via pole placement, digital PID controller design.
Microprocessor Based Control
Selection of processors – Mechanization of control algorithms – Merits and demerits – Applications of
temperature control – Control of electric drives.
Text Book:
K. Ogata, “ Discrete Time Control Systems”, Pearson Education Asia, 2001
Reference Books:
1. B.C. Kuo, “Digital Control Systems”, Oxford University Press, 1992.
2. M. Gopal, “Digital Control Engineering”, Willey Eastern Ltd.1989.
3. M.Gopal, “Digital Control and State Variable Methods”, Tata Mc Graw Hill,1999
L T P C
3 0 0 3





























