Embed Size (px)
Citation preview

MST 株式会社 MS テクノMOTOR CONTROLER MS TECHNO CO.,LTD.
〒811-4221
本社 福岡県遠賀郡岡垣町山田10481048 YAMADA,OKAGAKI-CHO,ONGA-GUN
,FUKUOKA
TEL 093) 282-3463
FAX 093) 282-3464
URL http://www.mstechno.net E-mail [email protected]
ご挨拶
1980年当時可変速ドライブには汎用インバータが使用されていました。汎用インバータでは、速度制御に限定され、位置決め制御にはリミットスイッチの信号で停止を行う方法が用いられ1mm単位の精度が一般的でした。一方、より精度を必要とする制御には、DCサーボが採用されましたが精度が0.01mm以下で、専用モータを含め高価なシステムになりました。そこで汎用の誘導電動機に着目し、位置決め精度が0.1mm程度で、かつエンコーダ処理回路(位置決めユニット)と、外部シーケンス信号処理(PLC)機能を内蔵したALL IN ONE UNITで、独自言語を持つMITY SERVOを開発し、1983年から製造販売を開始しました。皆様方のご愛顧でこの25年間いろいろな分野に採用頂き、オールデジタルベクトル制御方式のACサーボとして、DCサーボを上回る性能を有するまでに成長することができました。今後ますます環境にも優しい省エネ、およびパワー半導体大容量化の流れに沿った製品が要望されることから、
私たちは2005年12月より新たに創業し、2006年5月法人の
株式会社MSテクノ の MS SERVO として、 再出発をすることといたしました。
今後はお客様本位に徹し、ご要望に沿った使いやすく、信頼性のある製品をご提供できるよう、 また新しい応用製品の開発にも注力し、社会に貢献できる企業を目指して社員一同邁進する所存ですので、今後ともご支援賜りますようよろしくお願い致します。
株式会社 MSテクノ
代表取締役・社長 安 根 煥 AN GUN WHAN
MS TECHNO Co.,Ltd.

MS SERVOは
誘導電動機でサーボ特性を実現!!オールデジタル ベクトル制御 MS SERVOが0.1kw~300kwまで
MS TECHNO Co.,Ltd.
“new” MSB Series VEA Series

MS SERVOが常識を変えた !
汎用Induction Motorは素晴らしい素質のあるMOTORです。MS SERVOはその素質を見事に引き出しました。
“ MS SERVO (MITY SERVO) ”
これが21世紀のStandard!
(Induction Motor + Encoder )= Servo Motor
汎用Induction Motorは素晴らしい素質のあるMOTORです。MS SERVOはその素質を見事に引き出しました。
“ MS SERVO (MITY SERVO) ”
これが21世紀のStandard!
(Induction Motor + Encoder )= Servo Motor
MS TECHNO Co.,Ltd.
■ 超低速( 0.3rpm )で なめらか回転。
速度制御範囲 1:6000 (最重要特性!!)
■ 低速域で Torque300%を実現。
■ Motor停止中(0Hz)でも、Hold Torque抜群。
■ 優れたServo性能。 ・ 俊敏な加減速
・ 高精度位置決め制御
■ IM だから Maintenance Free。

• 超低速 (0.3rpm)で
なめらか回転。
[ 最重要特性!!]
• 速度制御範囲 1:6000 [ サーボモータを超える ]
Induction Motorが活きる。
• 低速域で
Torque 300%
を実現。
• 停止中でも
強いブレーキ力を発揮。
• IMだから
Maintenance Free• 俊敏な加速・減速。
MS TECHNO Co.,Ltd.

MS SERVOの豊富な機能
■ MS Languageによる多彩なMotor Control [ ・Torque ・Positioning ・Speed ]
運転途中に切替可
■ PLC機能を内蔵
[ ・Sequence In/Out ・Analog In/Out ]
■ シリアル通信
[ ・RS422、RS232C信号標準実装 ]
■ Encoder信号処理回路内臓 (2Encoder Type有り)
■ PCでのSupport System充実
MS TECHNO Co.,Ltd.

VEA Series
0.1KW~300KWVEAH01~3000AC400V
1.5KW~90KWVEA15~900AC200V
0.1KW~0.8KWVEAS 01~08AC200V
MOTORVEA TYPE入力電圧
OPTION : 入力電圧 DC24V,48V etc
MS TECHNO Co.,Ltd.
■ 小容量から大容量まで 同一システムでラインアップ。
■ 32bit All Digital Vector Control■ MSモータ言語で自由なプログラム制御
■ 最先端のパワーデバイスを採用。(DIP-IPM・大電流IPM )■ Original Hybrid-IC ( ・高集積化 ・高信頼性 )
Br M PG
汎用 インバータ
位置決め ユニット
PLC
制御信号
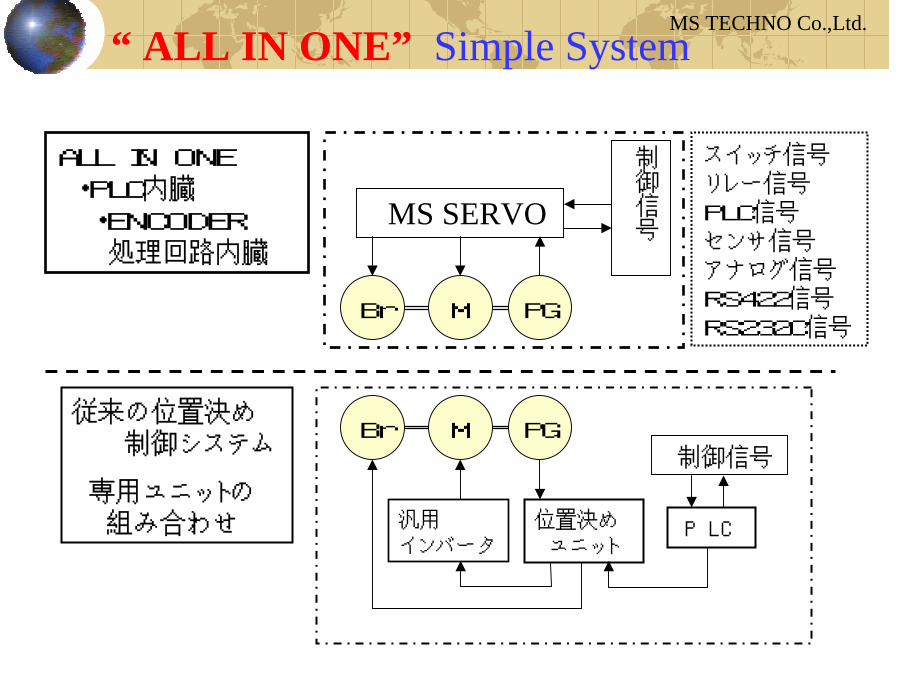
“ ALL IN ONE” Simple SystemMS TECHNO Co.,Ltd.
ALL IN ONE ・PLC内臓 ・ENCODER 処理回路内臓
従来の位置決め 制御システム
専用ユニットの 組み合わせ
MS SERVO
Br M PG
制御信号
スイッチ信号 リレー信号 PLC信号 センサ信号 アナログ信号 RS422信号 RS232C信号

MS SERVO 充実のHard ware
■ 全機種に同じCPU基板採用
・システムの共通化 ・ グループ制御
・ 32bit All Digital Vector Control ・ MSモータ言語で自由な制御
■ 最先端Power Device採用
DIP-IPM
大電流IPM■ Original Hybrid-IC ・ 高集積化 ・ 高信頼性
MS TECHNO Co.,Ltd.

PCとのシリアル通信
■ RS422&RS232C 標準実装
■ PCとのProgram送信・ 受信 (RAM AREA)
■ PC作成ProgramをROM化 (ROM AREA)
■ MS Servoの運転状況をMonitor (モータ電流 ・ 実回転Hz ・ 実トルクなど )
■ MS Servo運転中のParameter変更可能
■ MS Servo複数台でのGroup Drive可能
MS TECHNO Co.,Ltd.

Battery Drive MSB Series
■ 型式
MSB A100■ 入力電源
DC24V■ 駆動Motor AC12V・30A
MS TECHNO Co.,Ltd.

Battery Drive MSB Series
■ 型式
MSB M200■ 入力電源
DC24V DC48V■ 駆動Motor AC12V・60A AC27V・30A
MS TECHNO Co.,Ltd.

Battery Drive MSB Series■ MSB MXXX Series Line UP
入力電源電圧:DC24V/48V 出力Motor電流:AC30A~350A■ MSB IXXX Series 出力Motor電流:AC200A~1400A■ 使用例
電気自動車
電動バイク
電動アシスト自転車
GOLF CAR 無人搬送System(AGV)
MS TECHNO Co.,Ltd.
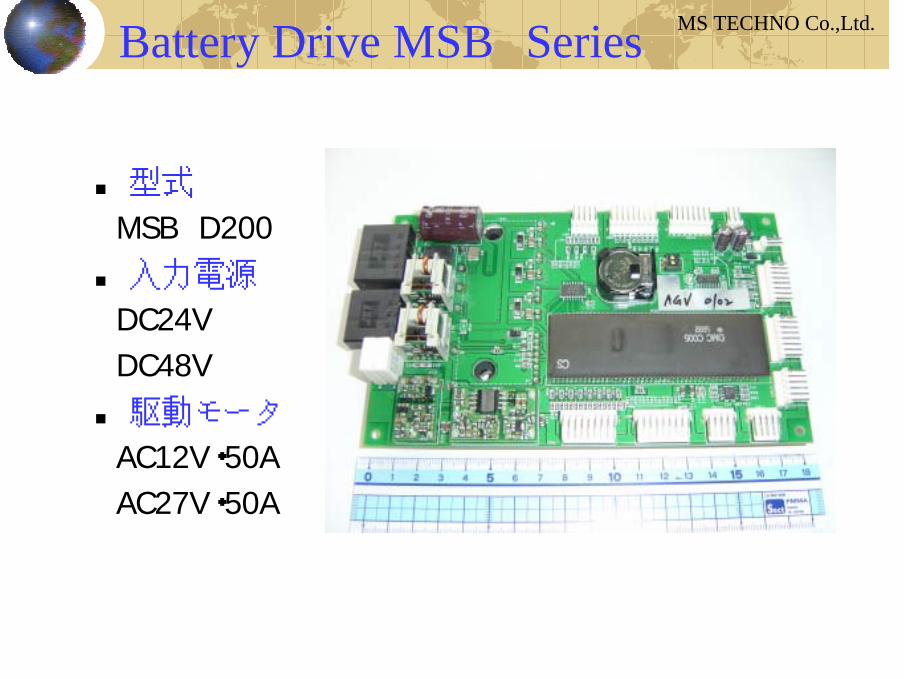
Battery Drive MSB Series
■ 型式
MSB D200■ 入力電源
DC24V DC48V■ 駆動モータ
AC12V・50A AC27V・50A
MS TECHNO Co.,Ltd.

Battery Drive MSB Series
■ 型式
MSB D100■ 入力電源
DC24V DC48V■ 駆動Motor AC12V・15A AC24V・15A
MS TECHNO Co.,Ltd.
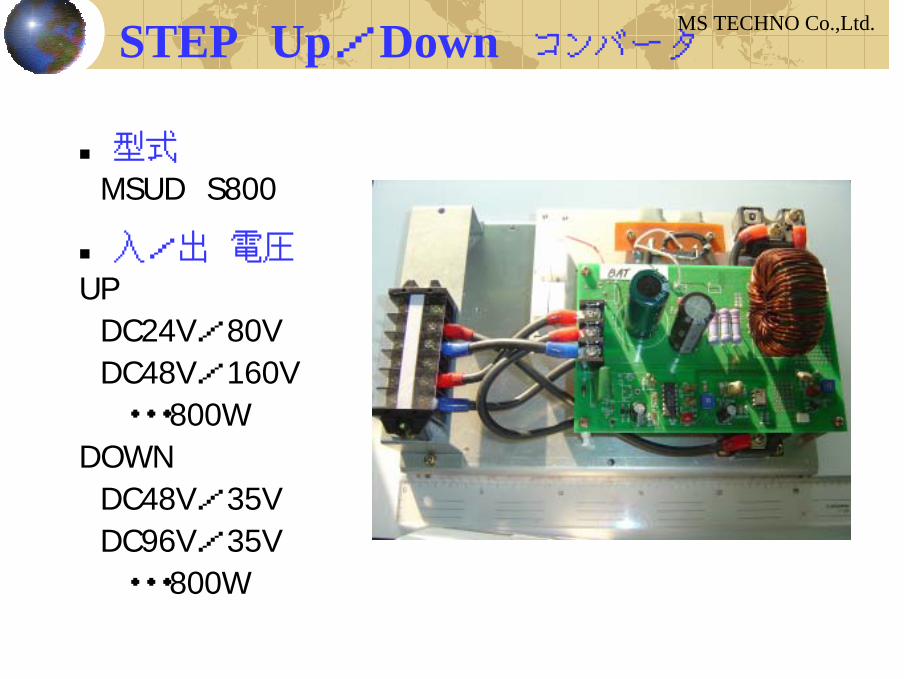
STEP Up/Down コンバータ
■ 型式
MSUD S800
■ 入/出 電圧
UP DC24V/80V DC48V/160V ・・・800WDOWN DC48V/35V DC96V/35V ・・・800W
MS TECHNO Co.,Ltd.

超小型 MSK Series
■ 型式
MSK T50
■ 弊社まで
問い合わせ
して下さい
MS TECHNO Co.,Ltd.

角度
360°/10000 pulse
= 0.036°/1 pulse
= 2.16’ /1 pulse
10mm Ball Screw
10mm/10000 pulse
= 0.001mm/1 pulse
= 1μm/1 pulse
• ENCODER ・・・ 2500 Pulse/Round• Motor 1Round ・・・ 10000 Pulse/Round
1 pulse 位置決め精度
エンコーダによる位置決め制御MS TECHNO Co.,Ltd.

位置決め制御 PSG
HZS
0 A
SFT
MAXHz
No.14
MINHz
(Ⅰ)式
(Ⅱ)式
t(時間)
■減速時の速度指令(HZS)は、次式により決定
a)HZS>PSG変更点(No.14) の場合 - - - - - (Ⅰ)
b)PSG変更点(No.14)>HZS>MINHzの場合- - - - - (Ⅱ)
KNoPLSPOSPSGHZS ×−−××= ).( 122
14122
.).(
NoKNoPLSPOSPSGHZS ×−−××
=
MS TECHNO Co.,Ltd.
※ No.12 :位置決め時減速完了手前パル
No.14 :PSG変更点(0.1HZ単位)
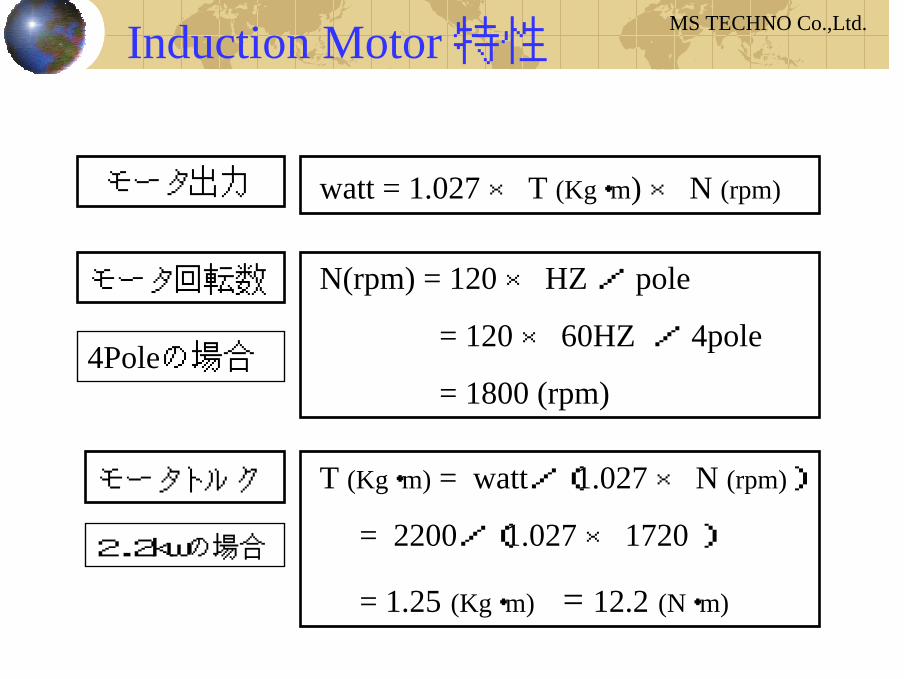
watt = 1.027 × T (Kg・m) × N (rpm)
N(rpm) = 120 × HZ / pole
= 120 × 60HZ / 4pole
= 1800 (rpm)
T (Kg・m) = watt/(1.027 × N (rpm))
= 2200/(1.027 × 1720 )
= 1.25 (Kg・m) = 12.2 (N・m)
モータトルク
モータ出力
モータ回転数
Induction Motor 特性MS TECHNO Co.,Ltd.
4Poleの場合
2.2kwの場合
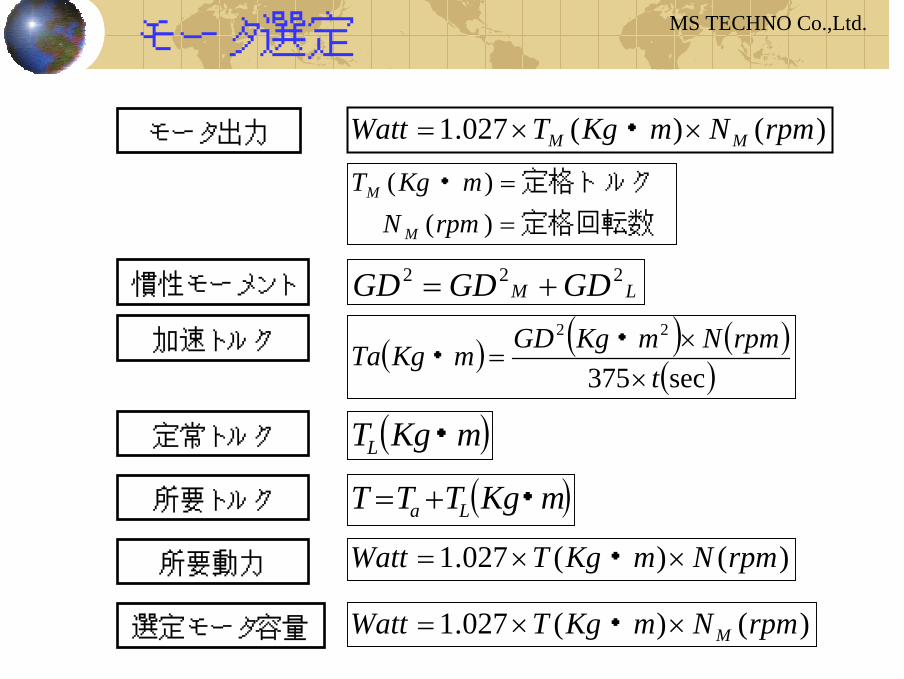
モータ選定
慣性モーメント
モータ出力
加速トルク ( ) ( ) ( )( )sec375
22
trpmNmKgGDmKgTa
××
=・
・
)()(027.1 rpmNmKgTWatt MM ××= ・
LM GDGDGD 222 +=
定常トルク
( )mKgTTT La ・+=所要トルク
( )mKgTL ・
所要動力 )()(027.1 rpmNmKgTWatt ××= ・
選定モータ容量 )()(027.1 rpmNmKgTWatt M××= ・
定格回転数
定格トルク・
=
=
)()(
rpmNmKgT
M
M
MS TECHNO Co.,Ltd.
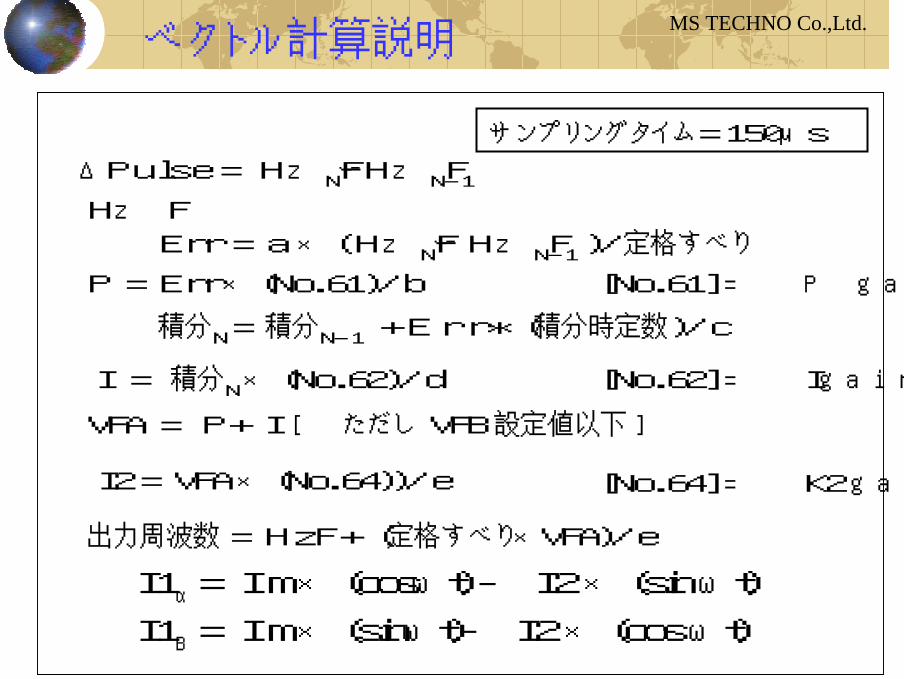
ベクトル計算説明MS TECHNO Co.,Ltd.
H z F
ΔP u l s e = H z FNーH z FN-1
E r r = a × ( H z FNー H z FN-1 )/定格すべり
P = E r r × (No.61)/b
積分N = 積分N-1 +E r r * (積分時定数)/c
I = 積分N × (No.62)/d
VFA = P + I [ ただし VFB 設定値以下 ]
I 2 = VFA × (No.64))/e
出力周波数 = H z F + (定格すべり×VFA)/e
I 1α= I m× (cosωt) ― I 2 × (sin ωt)
I 1Β= I m× (sinωt)― I 2 × (cos ωt)
[No.61] = P gain
[No.62] = I gain
[No.64] = K2 gain
サンプリングタイム=150μs
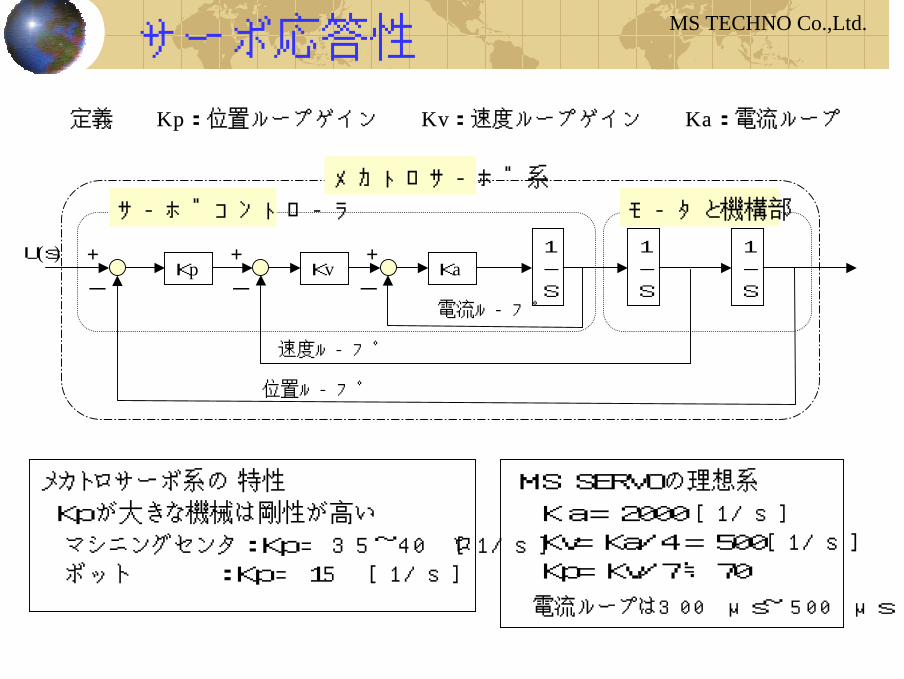
サーボ応答性
定義 Kp:位置ループゲイン Kv:速度ループゲイン Ka:電流ループ
メカトロサーボ系の 特性
Kp が大きな機械は剛性が高い
マシニングセンタ : Kp = 35~40 [1/s]ロボット : Kp = 15 [1/s]
K a = 2000 [1/s] Kv= Ka/4 = 500[1/s] Kp= Kv/7 ≒ 70
MS SERVOの理想系
電流ループは300 μs~ 500 μs
MS TECHNO Co.,Ltd.
Kp Kv Ka1-S
1-S
1-S
位置ループ
速度ループ
電流ループ
U(s) + +-
+--
サーボコントローラ モータと機構部
メカトロサーボ系
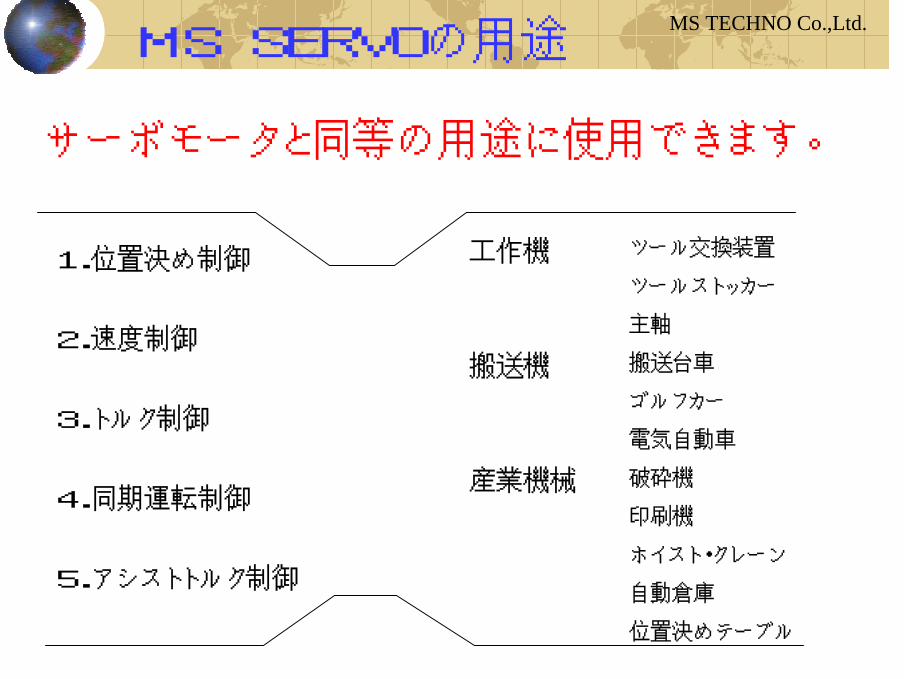
MS SERVOの用途
サーボモータと同等の用途に使用できます。
1.位置決め制御
2.速度制御
3.トルク制御
4.同期運転制御
5.アシストトルク制御
工作機
搬送機
産業機械
ツール交換装置
ツールストッカー
主軸
搬送台車
ゴルフカー
電気自動車
破砕機
印刷機
ホイスト・クレーン
自動倉庫
位置決めテーブル
MS TECHNO Co.,Ltd.

MS SERVOの適用例MS TECHNO Co.,Ltd.
7.5KW~110KW過負荷検出破砕機リサイクル
3KWDC48V(Motor AC27V)ゴルフカーバッテリ駆動
0.4KWDC48V(Motor AC27V *2台)AGV
巻上げ
巻上げ,走行
定量供給
粘度(トルク)-速度 自動調整
トルク(ロードセル)制御
全工程機種統一
ロードセル制御
エンジン代替(4WDデファレンシャル)
リフタ,コンベア,ローダ,XYテーブル
バックゲージ
低速振れ止め調整
多点位置決め
金型プレス(圧力制御)
ターンテーブル,バフ回転,バフZ軸
用 途 ・ 機 能
11KW~30KW荷物用エレベータ
3.7KW~55KWクレーン荷役運搬
0.1KW~2.2KWポンプ駆動
22KW攪拌装置化学工業
11KW,1.5KW送風バルブ制御発電所
0.4KW~3.7Wブラウン管電気
15KW~55KW圧延装置鉄鋼
30KW~75KW負荷試験装置
0.2KW~15KW搬送装置自動車産業
1.5KWシェアリングマシン
30KW~75KW大型旋盤
0.75KW,1.5KW,2.2KWATC工作機械
0.4KWパッケイジ成形
3.7KW,0.75KW,0.75KWシリコンウェハ研磨半導体装置
モータ容量 適用例装 置分 野

MS SERVOの特長
オールデジタルベクトル制御方式を採用
1.様々な機械の動作に合わせて、モータコントロール言語によるプログラムが 最適な運転を実現します。
3.最新のI P M素子を使用することで、高信頼性を実現しています。
4.シーケンス入力出力・アナログ入力・シリアル端子を標準装備しています。
5.エンコーダ処理回路を内臓しており、オール・イン・ワン ユニットです。
6.容量 0.1KW~300KW まで、同一システムでラインアップしています。
7.トルク制御・トルク検出が可能で、機械の安全にも
8.PC(パソコン)を接続し、運転状態をモニターする事ができます。
コマンド 送信でモータ運転制御ができます。
システム・ユーザパラメータの書込み/読取りも行えます。
MS TECHNO Co.,Ltd.

MS SERVOの特徴(比較表)
2 エンコーダタイプ有り有り無し無しエンコーダ処理回路有無
株式会社MSテクノ重電各社重電各社メーカ
ソフト開発支援ツール充実簡単(MSCL言語)難しい無し ソフト開発の難易
(割付自由)ソフト 優先ハード割付ハード 割付制御信号(割付)
1パルス位置決め2μm (2/10000)20μm1mm位置決め精度(10mmリード)
高応答7030 -速度応答性(Kp値)
高トルク400%~250%150%~200%150%瞬時最大トルク
超低速回転1:60001:10001:30速度制御範囲
安価1.52~31価格比較
用途に応じて最適制御ベクトル制御,V/F制御ベクトル制御V/F制御モータ制御方式
同一システムでラインアップ~300KW可可大容量モータへの対応
高速回転に対応280Hz120Hz120Hz最高制御周波数
低価格,短納期メンテナンスフリー
各社汎用モータ専用モータ汎用モータ使用するモータ
既設モータにエンコーダ⇒サーボモータ使用全用途工作機械・システム製品速度制御用途
シンプルなシステム
ユーザオリジナル製品の開発
位置決め制御・可変速
トルク制御・トルク検出
可変速
トルク制御
交流可変速目的
MS SERVO の特徴 MS SERVO誘導形ACサーボインバータ項目/ モータコントロール
MS TECHNO Co.,Ltd.

超低回転にもなめらか・高トルクMS TECHNO Co.,Ltd.
0
100%
200%
300%
0 1800rpm 3600rpm
A
B
C
C: 瞬時 B: 短時間A: 連続
三相誘導電動機 全閉外扇形 4pole
定出力定トルク
回転数分解能:0.3 rpm
速度制御範囲: [1:6000]

Type VEAS-02 Maximum-Torque Test Data
900rpm
0
100%
200%
300%
0 1800rpm 2700rpm
三相誘導電動機 全閉外扇形 4 pole
400%
500%0.2KW/4P/180v
0.2KW/4P/200v
Torque %
Speed rpm
MS TECHNO Co.,Ltd.

サーボモータの種類
AC インバータ 誘導電動機形
ACサーボモータ
誘導電動機形 (第3世代)
同期電動機形 (第2世代)
BLDC(DCブラシレス) 回転子に永久磁石 回転位置センサ ▼高速限界・減磁
▲ 小型化
汎用誘導電動機使用 ▼ 制御ソフト難しい
▲安価・頑丈・保守不要
▲高速運転・更新性
DCサーボモータ (第1世代)
直流電動機形回転子電流 整流子とブラシを経由 ▼ブラシ磨耗・火花 ▼高速限界・減磁
MS TECHNO Co.,Ltd.

W1W
C
MSB Series (200V) 外形図
(MSB-01 ~ MSB-37)
4-φ612922194104VEA-37
VEA-224-φ617012922194104
VEA-15
VEAS-08
VEAS-04
VEAS-024-φ61708818094104
VEAS-01
CDH1HW1W記号
機種
MS TECHNO Co.,Ltd.

W1W
C
VEA Series (200V) 外形図 1
(VEAS-01 ~ VEA-37)
4-φ6203298342219234VEA-37
VEA-224-φ6166148234141156
VEA-15
VEAS-08
VEAS-04
VEAS-024-φ6151122190117132
VEAS-01
CDH1HW1W記号
機種
MS TECHNO Co.,Ltd.

C
W1W
VEA Series (200V) 外形図 2(VEA-55 ~ VEA-550)
VEA-370
VEA-4504-φ10299730761330431
VEA-550
VEA-300
4-φ10299603631240330VEA-220
VEA-150
VEA-110
VEA-75 4-φ10250425451150257
VEA-55
CDH1HW1W記号
機種
MS TECHNO Co.,Ltd.
※ VEA-750 , -900については弊社にお問い合わせ下さい。

C
W1W
4-φ10
375
925
960
390
530VEAH-450VEAH-550
4-φ10
299
730
761
330
431VEAH-300VEAH-370
4-φ10299603631240330VEAH-150 VEAH-220
CDH1HW1W記号
機種
4-φ10
250
425
451
150
257VEAH-55VEAH-75 VEAH-110
VEA Series (400V) 外形図 3
(VEAH-55 ~ VEAH-3000)
MS TECHNO Co.,Ltd.
※ VEAH-750 , -900, -1100, -1300 , -1600 , -2300 , -3000 に
ついては弊社にお問い合わせ下さい。

MSB Series仕様 (200V)
(MSB-01 ~ MSB-37)
8442.52.52.52.5重量 (Kg)
18363650100130200最小回生抵抗値(Ω)
2412128432最大回生電流(A)
45272114115.72.8最大出力電流(A)
169.37.03.62.51.30.8定格出力電流(A)
5.33.22.41.30.80.50.3出力容量 (KVA)
3.72.21.50.750.40.20 .1適用モータ(KW)
37221508040201
MSB 機種
仕様
MS TECHNO Co.,Ltd.

VEA Series 標準仕様 (200V)
(VEAS-01 ~ VEA-37)
8442.52.52.52.5重量 (Kg)
18363650100130200最小回生抵抗値(Ω)
2412128432最大回生電流(A)
45272114115.72.8最大出力電流(A)
169.37.03.62.51.30.8定格出力電流(A)
5.33.22.41.30.80.50.3出力容量 (KVA)
3.72.21.50.750.40.20 .1適用モータ(KW)
37221508040201
VEAVEAS 機種
仕様
MS TECHNO Co.,Ltd.

VEA Series 標準仕様 (200V)
(VEA-55 ~ VEA-900)
55
1.5
320
360
190
71
55
550
1205540402520121210重量 (Kg)
0.751.52233111818最小回生抵抗値(Ω)
540320240240160160402424最大回生電流(A)
510360270270180120906060最大出力電流(A)
2601591331047753422722定格出力電流(A)
996151422920.215.210.37.5出力容量 (KVA)
754537302215117.55.5適用モータ(KW)
7504503703002201501107555仕様
VEA 機種
MS TECHNO Co.,Ltd.
120
0.75
540
510
315
120
90
900
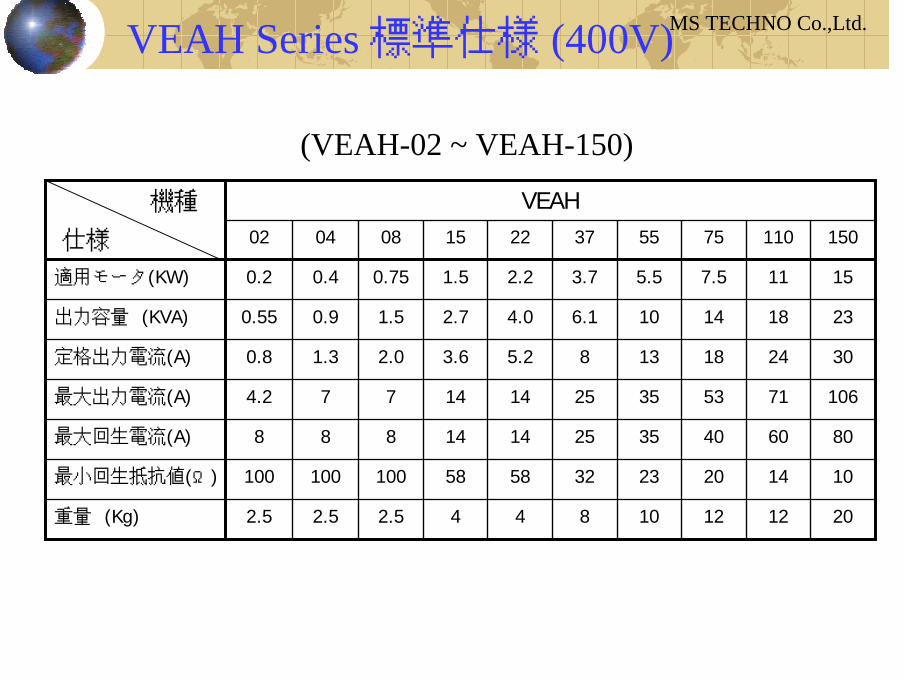
VEAH Series 標準仕様 (400V)
(VEAH-02 ~ VEAH-150)
12
14
60
71
24
18
11
110
2012108442.52.52.5重量 (Kg)
102023325858100100100最小回生抵抗値(Ω)
804035251414888最大回生電流(A)
1065335251414774.2最大出力電流(A)
30181385.23.62.01.30.8定格出力電流(A)
2314106.14.02.71.50.90.55出力容量 (KVA)
157.55.53.72.21.50.750.40.2適用モータ(KW)
1507555372215080402仕様
VEAH 機種
MS TECHNO Co.,Ltd.

VEAH Series 標準仕様 (400V)
(VEAH-220 ~ VEAH-3000)
150
1.75
400
630
250
190
132
1300
1801501301305555404025重量 (Kg)
1.61.751.92.52.92.93.86.76.7最小回生抵抗値(Ω)
450400400280280280210120120最大回生電流(A)
700 630465420280280210210140最大出力電流(A)
30021015514210585705744定格出力電流(A)
2291601301088065534434出力容量 (KVA)
16011090755545373022適用モータ(KW)
16001100900750550450370300220仕様
VEAH 機種
MS TECHNO Co.,Ltd.
詳しくは
弊社に
お問い合わせください
300220
30002200

5 00
40 0
3 00
2 00
1 00
0
T o r q u e %
F r e q u e n c y ( H z )
0 10 20 30 40 50 60 70 80 90
T y p e : V E A S - 0 2 M a x i m u m - T o r q u e T e s t D a t a
M o t o r : 0 . 2 K W / 4 P 1 0 0 % T o r q u e = 0 . 1 1 K g f ・ m
0 .2 KW /4 P/1 80 V
0 .2KW /4 P/2 00 V
Type VEAS-02 Maximum-Torque Test DataMS TECHNO Co.,Ltd.

破砕機運転状況 破砕材料:材木 データサンプリング例
MS TECHNO Co.,Ltd.
速度フイードバック
トルクフイードバック : 検出レベル VFA=700
モータ電流信号
正転側
逆転側

頭脳を持つ破砕機MS TECHNO Co.,Ltd.
過負荷検出 : フィードバック トルク検出機能(例)
■ トルク検出レベル設定可能 : 500~1000
■ 過負荷許容時間設定可能 : 0.1秒単位
■ 検出後の動作指定 : 逆転 rpm・時間5秒間
■ 検出後の繰返し動作指定 : 10回
破砕材料別の運転パターン設定
■ 硬質材料 : アルミ・石・セメント・木
■ 軟質材料 : ゴム・タイヤ・布・プラスチック

高機能・電動プレス機械
数多くの優れた機能が融合
■ 低速・大トルク特性
■ 大容量モータでの位置決め機能
■ 複数の運転モード設定
■ 過負荷検出による機械保護
MS TECHNO Co.,Ltd.

材料に優しい巻取り装置
アンコイラ(巻き出し装置)
■ 定張力のバックテンションコントロール
■ 低速・大トルク特性で安定運転
■ 過負荷検出による材料保護
■ 巻き出し半径補正 ディコイラ(巻き取り装置)
■ 定張力のテンションコントロール
■ 低速・大トルク特性で安定運転
■ 過負荷検出による材料保護
■ 巻き取り半径補正
MS TECHNO Co.,Ltd.

モータ言語(MSCL)で動き自由
■ モータ制御命令 ; SEVCC,SFT,HZP,VFB,MAXHZ,MINHZ; PLS,PLS2,PSG,POS,PLSI, etc
■ I/O 制御命令 ; C4,C5,C0,C1, AD0,AD1,DA0,DA1■ 分岐命令 ; JMP,JEQ,JPL,JMI,JSR,BRA■ Memory Move ; POKE,PEEK,DPOKE,DPEEK■ 四則演算命令 ; =, +,-,×,/,×2^,/2^■ 論理演算命令 ; AND,OR,EXR■ 2Byte Memory ; A0~A9,B0~B9■ 4Byte Memory ; AA,AC,AE,BA,BC,BF■ 表示命令 ; CA,CB,■ マシン語サブルーチン ; CALL ( $460, $464 )
MS TECHNO Co.,Ltd.
00 F7CF0460FFFFFFFF CALL $460 ;システムパラメータ
01 EFD001FFFFFFFFFF SEVCC=1 ;モータ通電 02 DEE1CFFE50FFFFFF L00 DPEEK HZP $FE50 ;User.Para No.0⇒HZP 03 F102FFFFFFFFFFFF JMP L00 ;JUMP
行 コマンド MSCL(モータ言語)
・1行 8バイト(16文字:16進数)
命令語一覧

MS SERVO のソフト ウェア
■ オペレイティングシステム OS : C3S270, C3W270, C3S580, C3W580
C : 1/100HZ
3S : Single Encoder 3W : Dabble Encoder
270 : Version No. 580 : Version No.
■ ユーザプログラム (ROM×3bank , RAM)
ROM : 1024 Lines RAM : 423 Lines
■ パラメータ
System Parameter : No.0 ~ No.96
User Parameter : 48step(2byte Memory)
MS TECHNO Co.,Ltd.
モータドライブ
ユーザプログラム
シーケンス制御etc
オペレイティング
システム(OS) MSCL
プログラム
システム
パラメータ
ユーザ
パラメータ
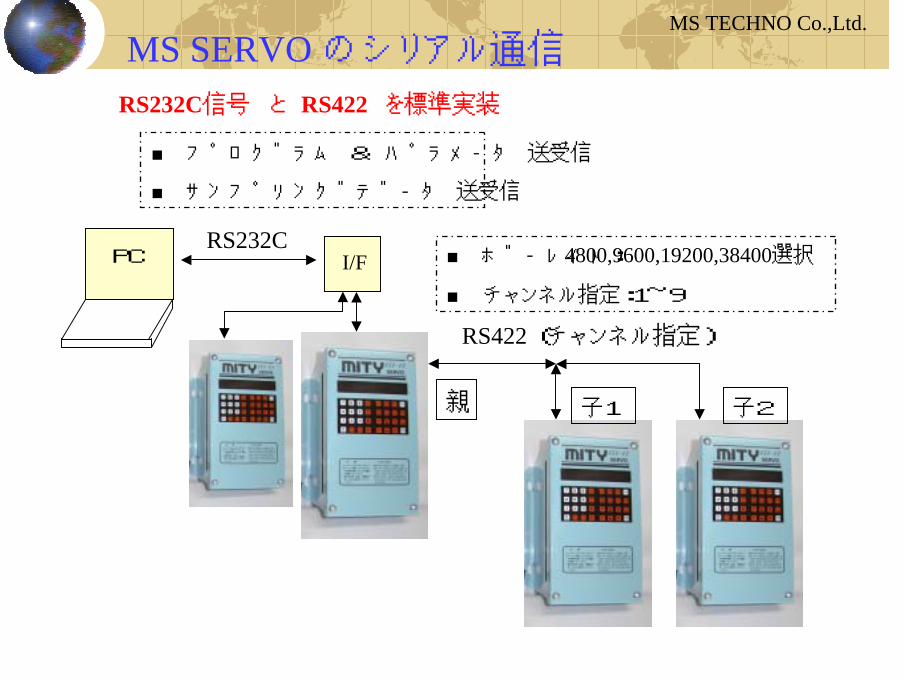
MS SERVO のシリアル通信MS TECHNO Co.,Ltd.
RS422 (チャンネル指定)
親 子1 子2
PCRS232C
RS232C信号 と RS422 を標準実装
I/F ■ ボーレイト: 4800,9600,19200,38400選択
■ チャンネル指定:1~9
■ プログラム & パラメータ 送受信
■ サンプリングデータ 送受信

MS SERVO Support SystemMS TECHNO Co.,Ltd.
MS System 2006
MS Shop 270
Flash A
MS3 MENU
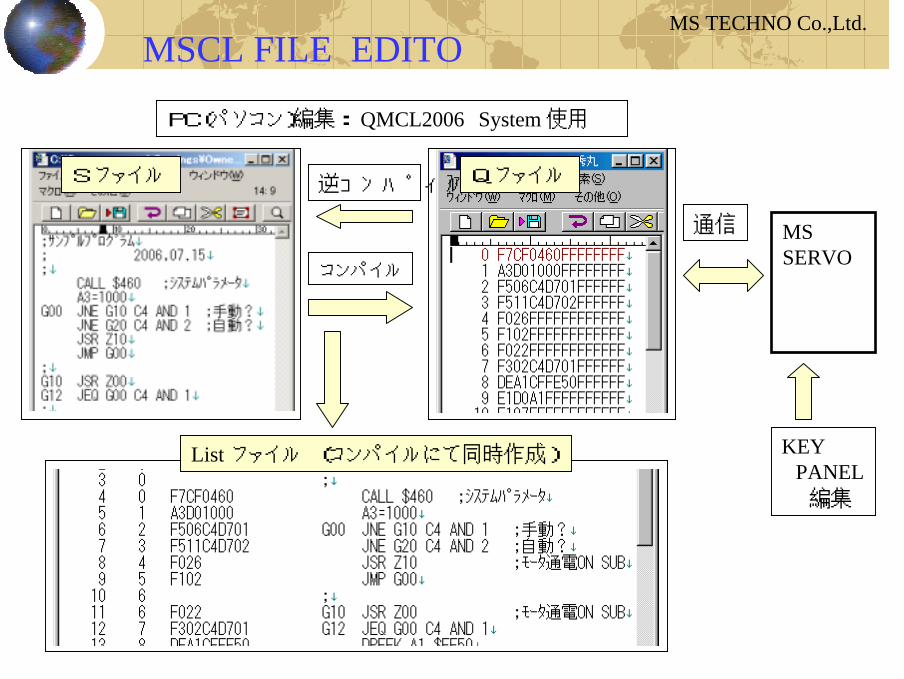
MSCL FILE EDITOMS TECHNO Co.,Ltd.
MS SERVO
KEY PANEL 編集
S ファイル
PC(パソコン)編集: QMCL2006 System 使用
通信
List ファイル (コンパイルにて同時作成)
コンパイル
Q ファイル逆コンパイル












![MS SERVO SUPPORT SYSTEM [MS3]MS SERVO SUPPORT SYSTEM [MS3]Version1.0 MS-SERVO を使用いただく場合の便利なツールとして、[MS3]を準備 いたしました。このツールは、プログラムのコンパイル・送受信](https://img.dokumen.tips/doc/110x75/60b86a3374e36f4158140b9d/ms-servo-support-system-ms3-ms-servo-support-system-ms3version1i0-ms-servo.jpg)
















