Upload
laurentiu-radoi
View
220
Download
0
Embed Size (px)
Citation preview
8/3/2019 MR Physics Primer
1/98
BASIC PRINCIPLESOF MR IMAGING
GE Medical Systems
Training in Partnership
8/3/2019 MR Physics Primer
2/98
In addition to the built-in features of the Adobe Acrobat Reader software,
several different types of navigation devices have been added to this electronicdocument. These buttons will appear at various points within the documentand allow you to jump to specific reference areas. A brief explanation of thesebuttons is illustrated below:
NAVIGATION NOTES ON USING THIS ELECTRONIC DOCUMENT
C O N T I N U E D
B A C K
(FIG. 58)
This button will appear in the lower right corner of ascreen containing text. It means that the next few pagesare going to be images or illustrations. By clicking thecursor on this button you will be taken to the next pagein the current text chain.
This button appears within the text itself. If a particularfigure (either an illustration or an image) is being refer-enced then clicking the cursor on the colored text willtake you to the page containing that particular figure.
This button works in tandem with the (FIG) button.
It appears on the bottom of a page containing anillustration or image. Clicking on it will return you tothe portion of text that the figure was referenced from.
8/3/2019 MR Physics Primer
3/98
BASIC PRINCIPLES OF
MAGNETIC RESONANCE IMAGING
COPYRIGHT 1990GENERAL ELECTRIC COMPANY
PAUL J. KELLER, PH.D.
DEPARTMENT OF MAGNETIC RESONANCE RESEARCH
BARROW NEUROLOGIC INSTITUTE
ST. JOSEPHS HOSPITAL AND MEDICAL CENTER
PHOENIX, AZ 85013
8/3/2019 MR Physics Primer
4/98
TABLE OF CONTENTSFOREWORD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
BASICS OF THE
MAGNETIC
RESONANCE
PHENOMENON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6Spins in a Magnetic Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7The Effect of Radio Frequency (RF) Pulses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15Relaxation: The Return to Equilibrium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
TRANSVERSE RELAXATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20LONGITUDINAL RELAXATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24FACTORS INFLUENCING RELAXATION RATES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
The Effect of Magnetic Field Gradients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30Fourier Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
PRINICIPLES AND TECHNIQUES IN MR IMAGING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Instrumentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
THE B0 FIELD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37MAGNETIC FIELD GRADIENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40THE B1 FIELD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42THE RECEIVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44THE COMPUTERSYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
Slice Selective Excitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47Frequency Encoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52Phase Encoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57Reconstruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61Multislice Acquisition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65Contrast . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67Parameters Influencing the Signal-to-Noise Ratio (SNR) and Spatial Resolution . . . . . . . . . . . . . . . . . . . . . . . . . . . .72Imaging with Gradient Echoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .783D-Gradient Echo Imaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84
BIBLIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90GLOSSARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
8/3/2019 MR Physics Primer
5/98
FOREWORDDr. Paul Keller, the author of the current
primer, has a profound understanding ofmagnetic resonance and its many applications,and many years of hands-on experience.Beyond this, he has the rare ability to teachMR physics (a term for which the averageradiologist has an innate aversion) in a non-threatening and lucid manner.
Felix W. WehrliMilwaukee, WisconsinJune, 1988
For many MR users, NMR: A Perspective
on Imaging had been the first exposure tomagnetic resonance. This highly successfulprimer was reprinted twice, and is nowpermanently out of print. Why not reprintit a third time? After all, MR physics cannothave changed a great deal over the past sixyears. True, but our understanding has,and so has the significance of many of itsaspects. In fact, the technology has madetremendous leaps forward since the begin-ning of this decade, when MR entered thephase of initial clinical trials. Also, theunderstanding of critical performance criteria
has become more sophisticated, parallelingadvances in instrumentation. New method-ology, such as rapid imaging, 3D acquisition,variable bandwidth and many more areterms and techniques which confront theMR novice.
C O N T I N U E D
1
8/3/2019 MR Physics Primer
6/98
Over the past several years, magnetic resonanceimaging (MRI) has developed into a verypowerful and versatile diagnostic technique
in medicine. This, in turn, led to the prolifera-tion of MRI equipment and spurred massiveamounts of research.
What are the reasons for all of this excitement?Unlike x-ray based modalities such as computedtomography (CT) scanning, MRI is a non-
invasive technique which does not employionizing radiation. Further, the only tissue-specific parameter that can be determinedwith x-rays is electron density, which doesnot vary greatly from one soft tissue toanother, and often necessitates the injectionof contrast media.
In MRI, on the other hand, there is a multitudeof tissue parameters which can affect MRsignals. The two most significant, the relax-
ation times, cover a wide range of values in various normal and pathologic tissues.In addition, signal acquisition parameterscan be manipulated in a variety of ways,enabling the user to control image contrast.
This primer has been written for physicians
and technologists who seek an introductionto the mechanisms underlying MRI.
The first section discusses the physics ofmagnetic resonance of atomic nuclei. Thesecond section introduces the techniquesemployed for exploiting the MR phenomenon
for the purpose of image formation.
C H A P T E R 1
CHAPTER 1
BASICS OF THE MAGNETICRESONANCE PHENOMENON
C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
7/98
A few basic physical equations are provided,but the text can be largely understood with-out them. Many of the figures and much ofthe glossary have been borrowed from an
earlier primer published by GE Medical Systems.
SPINS IN A MAGNETIC FIELD
During the development of the quantummechanical concept of atomic structure, itbecame apparent that most nuclei possess
a property called spin angular momentum,which is the basis of nuclear magnetism.In the following, let us construct an intuitiveview of the consequences and manipulationof nuclear spin. (REFS. 14-15).
(FIG. 1) depicts a nucleus spinning around
an axis. Since atomic nuclei are charged,the spinning motion causes a magneticmoment which is colinear with the directionof the spin axis. The magnetic moment actssimilar to a bar magnet having north andsouth poles. The strength of this magneticmoment is a property of the type of nucleusand determines the detection sensitivity ofMR(TABLE 1). 1H nuclei (protons) possessthe strongest magnetic moment, which,
together with the high biological abundanceof hydrogen, makes it the nucleus of choicefor MR imaging.
Consider a collection of protons as in(FIG. 2).In the absence of an externally applied magneticfield, the individual magnetic moments haveno preferred orientation. However, if anexternally supplied magnetic field (denotedB0) is imposed, there is a tendency for themagnetic moments to align with the external
field, just like bar magnets would do. Nuclearmagnetic moments in this situation mayadopt one of two possible orientations:alignment parallel or anti-parallel to B0 (FIG. 3).Thus, depending on their orientation, wecan define two groups or populations ofspins. Alignment parallel to B0 is the lower
energy orientation and is thus preferred,while the anti-parallel alignment is the higherenergy state (FIG. 4). For the sake of com-pleteness, it should be mentioned that thissituation of only two allowed states is trueonly for nuclei whose magnetic spin quantumnumber is equal to 1/2. This includes 1H,13C, 19F, 31P and others.
C H A P T E R1
C O N T I N U E D
C H A P T E R 1
8/3/2019 MR Physics Primer
8/98
FIGURE 1 The magnetic dipole and associated spin of certain nuclei maybe compared to a common bar magnet with rotation about the dipole axis.
C H A P T E R 1
B A C K
, ,
, ,
y y
y y
z
z
|
N
S
C H A P T E R1
http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/8/3/2019 MR Physics Primer
9/98
TABLE 1 Magnetic Resonance properties of some biochemically important nuclei
C H A P T E R1
B A C K
1 Gamma is directly proportional to the magnitude of the nuclear magnetic moment.
2 At constant field for equal numbers of nuclei.
NATURAL GAMMA1 RELATIVE2NUCLEUS ABUNDANCE % HZ/ GAUSS SENSITIVITY
1H 99.98 4257 1
2H 0.015 653 0.0097
13C 1.1 1071 0.016
19F 100 4005 0.830
23Na 100 1126 0.093
31P 100 1723 0.066
39K 93.1 199 0.0005
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
10/98
FIGURE 2 In the absence of an externally applied magnetic field,the nuclear magnetic moments have random orientations.
C H A P T E R 1
B A C K
,
yz
|
|
,
,
y
y
z
z
|,
yz
|
|
,
yz
|
|
,yz| ,
,
y
y
z
z
|
C H A P T E R1
http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/8/3/2019 MR Physics Primer
11/98
FIGURE 3 In the presence of an externally applied magnetic field (B0) spinsare constrained to adopt one of two orientations with respect to B0. These
orientations are denoted as parallel and anti-parallel.
C H A P T E R1
B A C K
, , y yz |
, , y yz |
B0
Parallel
Antiparallel
C H A P T E R 1
http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/http://goback/8/3/2019 MR Physics Primer
12/98
FIGURE 4 The parallel spin orientation is a lower energy state than anti parallel.Since spins must adopt one of the two orientations, there are two populations
(P1, P2) of spins corresponding to two energy levels (E1, E2). E2 is greater than E1,causing P1 to be greater than P2. Some spins of P1 may move to P2 if the exact
amount of energy equal to E2 - E1 = E is supplied to the system.
C H A P T E R 1
B A C K
Parallel
Antiparallel
IncreasingEnergy
E2
E1 p1
p2
E
C H A P T E R1
http://goback/http://goback/8/3/2019 MR Physics Primer
13/98
Other magnetically active nuclei, e.g. 2H and23Na, are allowed more than two orientations.
One might think that all of the spins would
occupy the lower energy state. This wouldbe true at a temperature of absolute zero,but we are interested in the situation undersomewhat more temperate conditions. Sincethe energy difference (K) between the twostates is very small, thermal energy alonecauses the two states to be almostequally
populated (the population ratio is approxi-mately 100,000 to 100,006). The remainingpopulation difference results in a net bulkmagnetization aligned parallel to B0. It is onlythis net magnetization arising from a smallpopulation difference which is detectable byMR techniques.
Lets examine this net magnetization inmore detail. The individual spins do notalign exactly parallel (or antiparallel) to B0,but at an angle to B0 (FIG. 5A). The spinassociated with the magnetic moment causesthe moment to precess around the axis of
B0. This is analogous to the case of a spinningtop: the top precesses about the axis defined
by the pull of gravity. This precession thendefines the surface of a cone.
Now we may refine our picture of how a
large collection of spins yields a net bulkmagnetization.(FIG. 5B) shows a model of thesituation at any given instant. Here, each ofthe vectors (arrows) represents an individualspin. Since we already know that there aremore spins aligned with B0 than against B0,the contribution of the bottom cone cancels
out, leaving only the excess spins of the topcone to consider. Any given vector on thetop cone could be described by its componentsperpendicular to and parallel to B0. Clearly,for a large enough collection of spins randomlydistributed on the surface of the cone, individualcomponents perpendicular to B0will cancel
each other. This leaves only the contributionsparallel to B0 explaining why the bulk netmagnetization is indeed parallel to B0.
We may next inquire how fast the individualspins precess on the surface of the cone.
1
C O N T I N U E D
C H A P T E R 1
8/3/2019 MR Physics Primer
14/98
FIGURE 5 (A) As seen previously in FIGURE 3, the spin axes do not actually align par-allel or anti-parallel to B0, but at an angle to B0. This causes the spin axis to precesslike a top around B0, thus describing the surface of a cone. (B) This is a depiction of acollection of spins at any given instant. The vector (arrow) M represents the bulk netmagnetization which results from the sum of the contributions from each of the spins.
1
B A C K
B0 B0
Parallel
Antiparallel
M
C H A P T E R1
http://goback/http://goback/8/3/2019 MR Physics Primer
15/98
This precessional frequency is given by abeautifully simple relationship called theLarmor equation, expressed as:
[1] B0 = F
F is the precessional frequency, B0 is thestrength of the magnetic field, and gamma() is related to the strength of the magneticmoment for the type of nucleus considered.
For our purposes:
H = 4257 Hz / Gauss
Thus at 1.5 Tesla (= 15,000 Gauss) 4257 Hz/Gauss x 15,000 Gauss = 63,855,000 Hertz =63.855 Megahertz (MHz).
Correspondingly, at 0.5 Tesla, the Larmorfrequency for protons is 21.285 MHz. Wesee that the rate of precession is very fast.
Re-examination of(FIG. 4) shows that sinceenergy is proportional to frequency, E may
be defined in terms of the frequency ofradiation which is necessary to induce
transitions of spins between the two energylevels. For reasons which are not obviouswithout delving more deeply into physics,the frequency corresponding to E is again
the Larmor frequency.
THE EFFECT OF RADIOFREQUENCY (RF) PULSES
In order to detect a signal, a condition ofresonance needs to be established. The termresonance implies alternating absorption
and dissipation of energy. Energy absorptionis caused by RF perturbation, and energydissipation is mediated by relaxation processes(Next Section). Simply put, as mentionedabove, irradiation of a collection of spins inan exogenous magnetic field with RF energyat the Larmor frequency induces transitions
between the two energy levels. RF energy atother frequencies has no effect. That isthe microscopic picture, but what canactually be observed for the macroscopicnet magnetization?
1
C O N T I N U E D
C H A P T E R 1
8/3/2019 MR Physics Primer
16/98
RF radiation, like all electromagnetic radia-tion, possesses electric and magnetic fieldcomponents. We may consider the RF asanother magnetic field (denoted as B1)
perpendicular to B0, i.e. along a given axisin the transverse plane (FIG. 6). When theRF is turned on, the net magnetization vectorbegins to precess about the B1 axis. Thus thenet magnetization rotates from the longitudinal(Z) axis toward the transverse plane thentoward the Z axis, then to the other side of
the transverse plane, and back to +Z and soon. If the RF is on for only a short period oftime, the net magnetization is rotated by acertain angle away from the longitudinalaxis; this angle is termed the flip angle.Intuitively, we understand that the flip angleis proportional to the duration of an RFpulse and the amplitude of the RF. As wewill see, flip angles of 90 and 180 are ofspecial importance in imaging.
Consider the situation immediately after a90 pulse(FIG. 7). The net magnetizationnow lies in the transverse plane and beginsto precess around the B0 axis. The rate ofthis precession is just as calculated above
it is the Larmor frequency. Since this ismacroscopic magnetization which is changingdirection (rotating) over time, it can inducean alternating (AC) current in a coil of wire,
and that current can be used to record theaction of magnetization in the transverseplane. (FIG. 8) shows such a record. Notethat it shows a sinusoidal oscillation at theLarmor frequency. Furthermore, the signalgets weaker with time. This is a free inductiondecay (or FID). Here free refers to the
lack of the driving B1 field at the time ofobservation; the signal which is induced inthe receiver coil decays over time. The signaldecay is due to a process known as relaxation.
RELAXATION: THE RETURN TO EQUILIBRIUM
Returning briefly to the analogy of a barmagnet aligned with an external magneticfield, we may inquire about what happens ifthe bar magnet is turned away from thisalignment. The bar magnet would naturallytend to realign itself with the field, but howrapidly would this occur?
1
C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
17/98
FIGURE 6 RF energy at the Larmor frequency acts as a second magnetic field (B1)which is perpendicular to B0. When the RF is on, M rotates about B1. As shown here,M is originally longitudinal and B1 is turned on long enough to rotate M by 90 i.e..
into the transverse plane.
B A C K
B1
B0
M
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
18/98
FIGURE 7 Once in the transverse plane, M precesses (rotates) about B0 at the Larmorfrequency. This rotating magnetization can induce an AC current in the receiver coil.The transverse magnetization decays over time, which is represented by a decreasing
length of the vector M.
B A C K
MXY
ReceiverCoil
C H A P T E R1
http://goback/http://goback/8/3/2019 MR Physics Primer
19/98
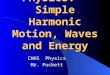
FIGURE 8 A graph of the voltage (signal) induced in the receiver coil versus time.This waveform is termed a free induction decay (FID); it is an ex ponentially damped
sine wave. The decay rate is characterized by the time constant T2*.
B A C K
SignalAmplitude
Time
-t/T2*
e
1.0
0.5
0.0
-0.5
-1.0
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
20/98
Would the return to equilibrium be linearor exponential with respect to time? For thebar magnet, the equilibrium orientation isin alignment with the external field. Once
equilibrium conditions have been attainedthere is no further change unless the systemis perturbed.
For the net magnetization arising froma collection of spins in an external fieldequilibrium is described by a vector of unit
length parallel to B0. We will see that it isappropriate to consider relaxation in thetransverse plane independently of relax-ation along the longitudinal axis.
Transverse Relaxation
Given that at equilibrium the net magnetiza-
tion is longitudinal, it follows that the equi-librium magnetization in the transverseplane is zero. This is illustrated in(FIG. 8),showing the decay of the transverse magne-tization to zero. This process is exponential(as opposed to linear). This is reminiscentof other natural processes, e.g. radioactivedecay. As in radioactive decay one could
define a quantity such as the half-life for thetransverse magnetization. The relationshipdescribing the decay is
[2] Mtransverse = M
0
transverse e
- t / T 2
*
Where M0transverse is the initial amount oftransverse magnetization, Mtransverse is theamount of transverse magnetization at anygiven time (t) after a pulse, e is approximately2.7, and T2* characterizes the rate of decay.
If t = T2*, M (T2*) = M0transverse / e =M0transverse / 2.7 = 0.37 M
0transverse
Hence, T2* is the time it takes for thetransverse magnetization to decay to 37%of the initial value.
What mechanisms cause the observed decayof transverse magnetization? As shown in(FIG. 9), different components of the mag-netization may precess at slightly differentrates, a process known as dephasing in thetransverse plane.
C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
21/98
FIGURE 9 (A) The B1 field of the RF rotates M into the transverse plane. (B-E) The mag-netization rotating in the transverse plane is actually the sum of the contributions fromall of the spins in the excited sample. However, the spins at different points in the sample
may not feel the same B0 field due to B0 inhomogeneity. This results in a range ofprecessional frequencies, causing the various components of M to spread apart over
time. This loss of phase coherence eventually leads to self-cancellation of the signal.
B A C K
y
y
y
y
yx
xx
xx
(A) (B) (C)
(D) (E)
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
22/98
Since the signal recorded is the sum of allthe transverse components, sufficient dephas-ing will lead to complete cancellation of thesignal. One of the major causes of this dephas-
ing is B0 inhomogeneity: spins at differentlocations are not exposed to exactly the sameB0 field, which in turn yields a range of Larmorfrequencies. If one had a completely homo-geneous B0 field, dephasing would still occur,but much more slowly. Since many atomicnuclei and electrons are spins and possess
magnetic moments, the microscopic localmagnetic environment of a spin participatingin the observed resonance is not preciselyidentical to those of the other observedspins. Additionally, these microscopic envi-ronments change very rapidly. This spatialand temporal variation of magnetic environments
yields variation in the Larmor frequenciescausing the slower dephasing This slowerdephasing and concomitant signal decay isdue to the physical properties of the system(or tissue) under investigation, and is denotedas T2 relaxation or spin-spin relaxation.Now it can be appreciated that T2* describes
the decay rate observed due to the combinationof spin-spin relaxation and B0 inhomogeneity.
For many reasons it is useful to record signalswhich reflect T2 rather than T2* decay. Obviously,some sort of trick is necessary in order toaccomplish this, since a perfectly homoge-
neous B0 field is not attainable. The trickis called a spin-echo, and it is the basis forthe majority of clinical MR imaging A pulsesequence is a set of RF pulses (and for imaging,field gradient pulses as introduced in thenext section) of defined timing and amplitudewhich is usually repeated many times, each
time resulting in collection of an MR signal.(FIG. 10) depicts an RF pulse sequence for aspin-echo. An initial 90 pulse yields a FIDwhich decays as a function of T2*, then at atime TE/2 after the 90 pulse, a 180 RFpulse is applied. After the 180 pulse, a so-called echo signal forms, reaching its maximum
amplitude at time TE after the initial 90pulse. A second spin-echo can be obtainedby applying another 180 pulse, and furtherechoes are possible with additional 180 pulses.Note that the echo-to-echo amplitudes decayas a function of T2 rather than T2*.
C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
23/98
FIGURE 10 A spin echo is generated by the application of a 90 RF pulse and,after a delay (TE/2), a 180 RF pulse. The peak of the echo occurs at time TE afterthe initial 90 pulse. Further echoes are obtainable with additional 180 pulses.The echo-to-echo decay rate is described by T2, which is much longer than T2*.
B A C K
T2 Decay
T2* Decay
Signal
RF
90 180
TE/2TE TE
180
1st Spin-Echo 2nd Spin-Echo
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
24/98
What causes the echoes to form, and how isthe effect of B0 inhomogeneity eliminated?The mechanism of spin- echo formation canbe explained by reference to (FIG. 11) .
Consider transverse magnetization arisingfrom two locations experiencing differentvalues of B0.
Transverse magnetization from the two locationswill precess at different rates. This is symbolizedwith two vectors labeled as F (fast) and S
(slow). Immediately after the 90 pulse, Fand S are together (in phase) in the transverseplane. Both F and S begin to precess clock-wise in the plane, but as time goes on F andS get further apart because of their differentprecessional rates. At this time, the 180 RFpulse is applied. Its effect is to rotate both F
and S into mirror image locations relative tothe 180 rotation axis. F and S now continueclockwise precession, with F behindS. Attime (TE), however, F will catch up with Sand both will be back in phase again. Ifthere were many vectors with a wide rangeof precessional frequencies, they would all
still come back into phase at time TE. In thesection on imaging techniques it will become
clear that the choices of TE and TR (timebetween repetitions of the entire pulsesequence) have a significant impact on signaland contrast of MR images.(REF. 16)
Longitudinal Relaxation
Up to this point, only relaxation in the trans-verse plane has been discussed. A separateprocess must exist which restores longitudinalmagnetization to its equilibrium value.
Immediately after a 90 pulse, the net mag-netization vector lies in the transverse plane.Therefore the amount of longitudinal mag-netization is zero. If we examine the amountof longitudinal magnetization present atvarious times after the 90 pulse, we findthat it builds up exponentially from zero to
approach the equilibrium value, which is afunction of the number of spins present,temperature and magnetic field strength(FIG. 12). The process by which this occursis denoted as spin-lattice relaxationor T1relaxation. In terms of the two energy levelsin (FIG. 4), a 90 pulse makes the spinpopulations equal.
C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
25/98
FIGURE 11 Mechanism of spin echo magnetization which begins to lose phase coher-ence largely due to B0 inhomogeneity. As the magnetization precesses and fans out inthe transverse plane, the fast (F) and slow (S) edges of the magnetization can be
identified. The 180 pulse rotates all of the magnetization up out of the transverse planeand back down onto the opposite side of the transverse plane. Precession now
continues in the same direction as before, but now the fast edge is behind the slow
edge leading to re-phasing and echo formation.B A C K
TransversePlane
time time
time time
Echo
90
RF
180 RF Pulse
F
F
F
S
S
S
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
26/98
FIGURE 12 After a 90 RF pulse, all of the magnetization lies in the transverse plane.T2 processes and B0 inhomogeneity lead to an exponential decay of transverse
magnetization, while longitudinal magnetization increases with time.
B A C K
Longitudinal
Transverse
Time0
0
M
M0
90 RF
C H A P T E R1
http://goback/http://goback/8/3/2019 MR Physics Primer
27/98
Longitudinal relaxation restores the originalequilibrium population difference by returningsome spins to the lower energy state, and inthe process giving up energy to the environ-
ment (lattice).Longitudinal relaxation seems to share someof the features observed for transverse relaxation;both are characterized by exponential evolution.In what may be viewed as complementaryprocesses, transverse magnetization decays,
from maximum to zero, while longitudinalmagnetization builds up from zero to maximum.Not surprisingly then, the quantitative expressionfor T1 relaxation looks similar to what wasseen for T2:
[3] M longitudinal = M0longitudinal (1 e
t/T1)
Equation [3] predicts the amount of longitu-dinal magnetization that will be present attime = t (M longitudinal) and the value ofT1.T1 is the length of time necessary to decreasethe difference between the current value ofM longitudinal and the equilibrium value by a
factor of(1 1/e) = (1 1/2.7) = 6 3% . Thisstatement implies that the rate of increase
in longitudinal magnetization is fastestwhen M longitudinal is very different from itsequilibrium value. In(FIG. 12), this conceptof a decreasing rate of change over time is
seen graphically. Comparing T1 and T2 forany given system, T1 is always greater thanor equal to T2.
Factors Influencing Relaxation Rates
What physical factors affect the observedrelaxation times? In general, the same con-
ditions that shorten (or lengthen) T1 alsoshorten (or lengthen) T2. There may bemore than one mechanism acting to yieldT1 and/or T2 relaxation, in which case theobserved relaxation (T1 or T2) due to thecombined action of mechanisms labeledgenerically as a, b, c . . . is given by:
1 1 1 1[4] = + + + . . .
T observe Ta Tb Tc
Due to this sum of reciprocals relationship,the longer the relaxation time, the greaterthe change caused by the introduction of
an additional mechanism on the observedrelaxation time.C O N T I N U E D
C H A P T E R 1
8/3/2019 MR Physics Primer
28/98
For pure water T1 = T2, whereas in tissuesT1 >> T2. The total range over which T2 canchange in pathological situations is thereforemuch greater. In fact, in edema, for example,
T2 may be prolonged several hundred percent.It is for this reason that images highlightingvariations of T2 are most sensitive in detectingpathology(REF. 11). (TABLE 2) gives T1 and T2values encountered in various normal tissues.
The rate of relaxation is strongly influenced
by the rate at which the molecules bearingthe protons being observed tumble in solution.Slower tumbling yields faster relaxation(shorter relaxation times). When tumblingis very slow, as in the case of protons cova-lently bound to macromolecules (proteins,nucleic acids, etc.), T2 is so short that their
signals decay completely between excitationand detection.
In MRI, only mobile protons can contributesignals for imaging These mobile protons arein the form of water and some lipids. Sincelipid molecules are larger than water mole-
cules, and hence tumble more slowly, in
general, lipid protons relax more quicklythan water protons.
The issue of water relaxation in vivois com-plicated by the fact that water moleculesspend part of the time freely tumbling whilesurrounded by other water molecules, andpart of the time loosely bound to the surfaceof macromolecules. Because there is a veryrapid exchange between this free andbound water, this leads to an observation
of relaxation times which reflect an averageof relaxation as bound and free water. Thus,the greater the percentage of the time thatan average water molecule is in a boundstate, the shorter the relaxation time.
Consider what parameters influence this
ratio of time spent in free and bound states.Certainly the percent of water in a giventissue would have an effect. Indeed, tissueswith lower water content display shorterrelaxation times than tissues possessinghigher water concentrations. The chemicalnature of the tissue may also have a role in
the determination of this free/bound ratio.C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
29/98
TABLE 2 Representative relaxation times for various tissues1
B A C K1 Appropriate values in milliseconds measured at 1.0 Tesla (REF. 10)
TISSUE T1 T2
WHITE MATTER 390 90GRAY MATTER 520 100
CEREBROSPINAL FLUID 2000 300
SKELETAL MUSCLE 600 40
FAT 180 90LIVER 270 50
RENAL MEDULA 680 140
RENAL CORTEX 360 70
BLOOD 800 180
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
30/98
For a tissue like the white matter of thebrain containing a great amount of highmolecular weight lipids (myelin), waterspends less time in a bound state than it
might otherwisesimply because oil andwater do not mix.
The strength of the B0 field also influencesrelaxation times. This is due to the fact thatthe efficiency of relaxation is related to theratio of the tumbling rate to the reciprocal
of the Larmor frequency. In general, T1relaxation times are shorter at lower fieldstrengths. The presence of paramagneticspecies such as iron and paramagnetic contrastagents (e.g. Gd + 3 DTPA) will shortenrelaxation times. Their effect is firstobserved on T1 and then with increasing
paramagnetic concentrations, on T2 as well.For more information on basic spin physicsof relaxation, the reader is directed to(REFS. 14) in the Bibliography.
THE EFFECT OF MAGNETIC FIELD GRADIENTS
In a broad sense, a magnetic field gradientsimply refers to the spatial variation of the
strength of the B0 field. This was encounteredpreviously when discussing the dephasingeffects of B0 inhomogeneity, which may beviewed as an irregular spatial variation of B0.For the purposes of imaging however, fieldgradients like those illustrated in (FIG. 13)are needed. The slope of the gradient, its
direction (i.e. along what axis), and timingneed to be controlled. Furthermore, formost applications, the B0 field must becaused to vary in a linear fashion with distance.Note that a gradient does not change thedirection of B0 but rather it changes thespatial variation of the amplitude of the
B0 field.
C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
31/98
FIGURE 13 The object at the top of the figure contains two small waterfilled cylinders.(A) In the absence of a gradient, the B0 field is the same at all points in the object as
depicted by the set of vectors. Application of an RF pulse to the object yields a FlD con-sisting of a single frequency. (B) Here, a gradient of the B0 field is imposed along thex-axis of the object. The spins in the two cylinders are exposed to different B0 fieldsand thus possess different Larmor frequencies. An RF pulse now gives an FID which
is an interference pattern of the two frequencies.B A C K
z
y
x
Time Time
G = 0 G 0x x
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
32/98
Suppose that there exists a linear gradientalong one spatial axis. Since
[1] B0 = F
the resonance (Larmor) frequencies of protonswill vary according to their positions alongthe gradient axis. This is key to the under-standing of image formation. Since we canmeasure frequencies and we know the imposedspatial variation of B0, the positions of res-onating protons can be determined fromtheir frequencies.
In summary, a magnetic field gradient caus-es transverse magnetization to precess at afrequency which is proportional to positionalong the gradient axis as follows:
[5] F = (B0 + r Gr)
Where r is position along the axis of thegradientGr. The presence of a gradient hasno significant effect on longitudinal magne-tization.
Let us now consider the fate of transversemagnetization when a gradient is switchedon for a short period of time and thenswitched off(FIG. 14). It may seem odd at
first, but transverse magnetization canremember the effect of gradients whichwere present at an earlier time. FollowingRF excitation and before imposition of thegradient, transverse magnetization arisingfrom three different positions along thegradient axis, are all precessing together
(in phase) at the same frequency. When thegradient is turned on, the vectors rotate atdifferent rates (frequencies) according toposition. When the gradient is turned off,all of the precessional frequencies are againthe same, but the vectors representing trans-verse magnetization are no longer in phase.
Continued precession, all at the samefrequency, will not change the angles (relativephases) between the three vectors. Theaction of the past gradient pulse is thusremembered as phase memory (REF. 5).
C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
33/98
FIGURE 14 Phase memory. Spins at three distinct locations (A,B,C) along a gradient
axis is shown. A 90 RF pulse generates transverse magnetization from all three sites.In the absence of a gradient, vectors A,B,C precess in phase. When the gradient isswitched on, the spins at locations A,B and C are exposed to different B0 fields, whichin turn give rise to different precessional frequencies for the three locations. While thegradient remains on, the relative phase angles, e.g. between vectors A and B or B and C,become larger and larger. However, when the gradient is switched off the precessionalrates for A, B, and C become equal again. Continued precession does not alter the
phase (angular) relationships between the three vectors.B A C K
90
RF
time
time
turn ongradient
turn offgradient
wait
wait
timeA, B, C
A
A
A
A
A, B,
C
BB
B
BC
C
CC
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
34/98
FOURIER TRANSFORMATION
We have seen that the basis for image formationis a positionally dependent frequency responseof transverse magnetization. Thus, an image
is a graph of amplitude versus frequency(FIG. 15). There remains a problem, however.The signals that are received, like the FID in(FIG. 8) or the echo in (FIG. 10) are in theform of amplitude versus time, rather thanamplitude versus frequency, as needed foran image. At first this may seem to be a trivialproblem. Looking at the FID in(FIG. 8), thefrequency of the signal is easily determinedas the reciprocal of the time interval betweentwo adjacent peaks. What makes the problemless than trivial is that signals are receivedfrom all positions at the same time. The
resultant signal is the superimposition (or sum)of a multitude of frequency components,each with distinct amplitudes and relativephases. Thus, it is an interference patterncomposed of all these components. A procedureis needed which can determine what set offrequencies, amplitudes and phases would
give rise to the observed interference pattern.
Such a procedure would be called a trans-formation from the time domain to thefrequency domain.
Most MR imaging and NMR spectroscopymakes use of the Fourier transform (FT),named after J.B.J. Fourier (1768-1830) whodeveloped the mathematical theory. In 1960,researchers at IBM devised a new algorithmfor calculating the Fourier transform ofarbitrarily complex digitized waveforms.
The new algorithm (the Fast Fourier transformor FFT) greatly reduced the number of arith-metic operations necessary to calculate Fouriertransforms. Although the required numberof operations is still quite large, fast computerscan accomplish an FFT in a fraction of asecond.(REF. 17)
A sinusoidal waveform (a sine wave) is com-pletely defined by specifying three quantities:the amplitude, the period (or its reciprocalfrequency) and the phase. The phase of asinusoid describes what point in the wavecycle the sinusoid displays a given time versus
a reference sinusoid of the same frequency.C O N T I N U E D
C H A P T E R1
8/3/2019 MR Physics Primer
35/98
FIGURE 15 (A) The Fourier transform is a mathematical process which mediates theinterconversion of time (units of sec.) and frequency (units of 1/sec. = Hz) descriptions
of waveforms. If two adjacent peaks in FID A are found to be separated by 0.01 see,the FT will yield a peak at 1/0.01 sec., = 100 Hz. (B) The power of the FT is its ability tosort out arbitrarily complex time domain waveforms into their individual frequency
components The time domain signal here is an interference pattern which arose due toimposition of a gradient across the object in FIGURE 13. The FT shows the two compo-nent frequencies. Since the gradient causes variation of frequency with distance, thefrequency domain here represents a one-dimensional projection image of the object.
B A C K
(A)
(B)
Time Frequency
hi i h h d i i f h h i f i i i f i i
C H A P T E R 1
http://goback/http://goback/8/3/2019 MR Physics Primer
36/98
This is the same as the description of therelationship between the three vectors inthe last section after turning off the gradient.Fourier transformation conserves all three
pieces of information. In clinical MR imaging,however, the phase information is usuallydiscarded at the final stage of reconstruction.
Frequency is the reciprocal of time, andtime is the reciprocal of frequency; the FTof the time domain is the frequency domain,
and vice versa. The information content inthe two domains is identical, but the formatis different.
The necessity of examining information in onedomain instead of the other actually arisesfrom the constraints of human perception.(For an example, see the Reconstruction section
under MR Imaging Techniques.) We are capableof something like a mental FT when we listento a chord of music. The sound arrives at ourears as an interference pattern of the notesof the chord; however, we can still discernindividual notes played together to yieldthat chord(REFS. 4, 18). By contrast, the eye
is not capable of extracting individual wave-lengths of, say, white light. This decomposition,however, can be achieved by means of a prismwhich serves as a Fourier analyzer.
C O N T I N U E D
C H A P T E R 2
CHAPTER 2
8/3/2019 MR Physics Primer
37/98
CHAPTER 2
PRINCIPLES AND TECHNIQUESIN MR IMAGING
C O N T I N U E D
Beyond the nominal strength of the B0 field,the homogeneity of this field over the imagingvolume must be considered. B0 inhomogeneity
of just a few parts per million (ppm) leadsto noticeable shading of MR images, whilegreater inhomogeneities give rise to spatialdistortions in the images.
Clearly, much of the advantage of high-fieldstrength can be lost without sufficient
homogeneity. B0 homogeneity is optimizedby a procedure known as shimming. Here,the magnet is fitted with a set of electromagneticcoils. By carefully adjusting the amount ofcurrent in each of these coils, the B0 fieldover the imaging volume is adjusted orshaped until acceptable homogeneity is
achieved.
INSTRUMENTATION
From the preceding discussion, the equipmentnecessary for MR imaging can largely beinferred. A typical MR imaging system blockdiagram is given in(FIG. 16).
The B0 Field
The source of the static B0 magnetic field isa magnet large enough for a person to be
positioned in its homogeneous portion. Theproperty of prime importance is the strengthof B0. High magnetic field strengths aredesirable because, as discussed on pages 72-78, this parameter ultimately limits thestrength of the MR signals to be received.High magnetic field strengths require a
superconducting magnet such as that dia-gramed in(FIG. 17).
C H A P T E R2
8/3/2019 MR Physics Primer
38/98
FIGURE 16 Functional block diagram of an MR imaging system.
B A C K
OPERATING CONSOLE
MAGNET
CRT
Computer
Digitizer
Keyboard
Receiver
Transmitter
Gradient Amplifier
RF Coil
RF Coil
Gradient
Coils
FunctionButtons
TrackBall
DiskDrive
Multi-FormatCamera
MagneticTape Unit
C H A P T E R 2
http://goback/http://goback/8/3/2019 MR Physics Primer
39/98
FIGURE 17 Cross-sectional view of superconducting magnet.
B A C K
HELIUM
NITROGEN
MAGNETS ANDSHIM COILS
VACUUM
WARM BORE
OUTSIDE OFN2 VESSEL
Magnetic Field Gradients The gradient coils on the other two orthogonal
C H A P T E R2
http://goback/http://goback/8/3/2019 MR Physics Primer
40/98
Magnetic Field Gradients
As discussed earlier, gradients in the B0 fieldalong the three orthogonal spatial axes arefundamental to image production. Gradients
along other oblique axes can be implementedwith combinations of the orthogonal gradients.
(FIG. 18) shows the basic scheme for obtaininga B0 gradient parallel to the direction of B0.Two coils of wire (a), and (b), are suppliedcurrent which generates magnetic fields,
adding (a) or subtracting (b) from the mainB0 field. At any given point along the gradientaxis, the net magnetic field is equal to thesum of B0 plus the magnetic field contributionfrom coil (a) plus the contribution from coil(b). It is the coil which is closer to the positionof interest that has the greater effect on the
net magnetic field.
Note that at a point midway between thetwo coils, the magnetic fields generated bythe two gradient coils cancel each other,causing the net magnetic field to be equalto B0. The gradient coils are positioned such
that this mid-point is at the center of the B0magnet, and is denoted as the isocenter.
The gradient coils on the other two orthogonalaxes are constructed differently, but they alsocause additions and subtractions to the B0field dependent upon position alone these
axes. Additionally, the mid-points of no netgradient contributions are positioned tooccur at the magnets isocenter. Power issupplied to each of the gradient coils byindependent computer-controlled gradientamplifier.
What properties of the magnetic field gradientsimpact upon system performance and ultimatelyimage quality? There are several. As shown inthe next three sections, the maximum attainablegradient amplitude (or slope, which is thechange in magnetic field per unit distance,often cited in terms of Gauss/cm) limits the
minimum slice thickness and the minimumfield-of-view (FOV) that can be used. Gradientlinearity refers to the uniformity of the slopealong the gradient axis; non-linearity yieldsimage distortions.
C O N T I N U E D
C H A P T E R 2
8/3/2019 MR Physics Primer
41/98
FIGURE 18 The design of a gradient coil acting parallel to B0. The coil is divided into
two sections (a and b) which are supplied DC current from the gradient amplifier forthis axis. Coil a produces a magnetic field Ba which adds to B0, while coil b pro-
duces Bb subtracting from B0. The strength of Ba and Bb. decreases with increasingdistance from coils a and b respectively, while the strength of B0 is constant overthis region. At any point along this axis the net magnetic field (Bnet) is the sum ofB0, Ba, and Bb. This results in a linear variation of Bnet; Ba and Bb cancel at isocenter
giving Bnet, = B0 at that position.B A C K
Current
Current
IsocenterIsocenterDistance
alongthe Axis
+ BaB0 BbB0 B0
Bb
Ba
B0 a
b
FromGradientAmplifier*
In practice gradients are not powered at all A potentially more powerful approach is the use
C H A P T E R2
http://goback/http://goback/8/3/2019 MR Physics Primer
42/98
In practice, gradients are not powered at alltimes, but are switched on and then off again(pulsed) at certain times during a pulsesequence. This raises further concerns. Howfast a gradient can be powered from zero tofull amplitude is referred to as the rise time,which should be as short as possible.
But the act of switching gradients on andoff causes another problem. It induces theformation of electronic currents, so-callededdy currents in the metallic structures ofthe magnet. These eddy currents generatemagnetic fields of their own, which dissipateat differing rates. Clearly, eddy currents areundesirable and can have deleterious effectson image quality.
One solution to this problem is to drive thegradient coils not with the desired pulseshape, but rather with an empirically deter-mined pulse shape which cancels out eddycurrent contributions and yields the desiredgradient in the magnet.
A potentially more powerful approach is the useof self-shielded gradient coils. These coils areconstructed such that the magnetic fieldsgenerated by them are confined to the interiorof the coils thus preventing the formation ofeddy currents in the remainder of the magnet.
The B1 Field
The basic RF architecture for generation ofRF pulses constituting the B1 field is diagramedin (FIG. 19).An extremely precise and stable
source of RF at low power levels is a digitalfrequency synthesizer set to yield RF at theproton Larmor frequency (F0) in the absenceof gradient contributions. As discussed underslice selective excitation (Last Section), it isuseful to be able to make small changes (F0)to the value of F0; waveform modulation and
pulse control are also essential. An RF poweramplifier then varies the RF power to thatrequired for imaging. All of these stages arecontrolled by a computer, which is alsoresponsible for pulse sequence execution. Thefinal RF energy is sent to the RF coil in themagnet which acts as a broadcasting antenna.
C O N T I N U E D
C H A P T E R 2
8/3/2019 MR Physics Primer
43/98
FIGURE 19 Functional block diagram
of the RF transmitter section of an MRinstrument. A digital frequency syn-
thesizer with a thermostated quartzcrystal reference produces lowamplitude RF of frequency F0 whichis the Larmor frequency at B0. Slice
selective excitation requires the abilityto make small frequency changes toF0, which is accomplished by additionor subtraction of an offset frequency(F0). Waveform modulation serves tocontrol the profile of the excited slice,and pulse control determines when
RF is allowed to pass to the final RFpower amplifier.
B A C K
SOURCE OFRF FREQUENCY = F0
FREQUENCY SYTHESIZER
SMALL FREQUENCYCHANGES BY ADDITION
OR SUBTRACTION OF F
PULSE CONTROL ANDAMPLITUDE MODULATION
WITH SINC WAVEFORM
RF POWER AMPLIFIER
RF COIL INSIDE MAGNET
F0 F
PULSES OF F0 OF F
F0
PULSES OF F0 OF F
COMPUTER
For most applications, it is desirable for the Transverse magnetization induces an AC
C H A P T E R2
http://goback/http://goback/8/3/2019 MR Physics Primer
44/98
For most applications, it is desirable for theRF coil to distribute the RF energy uniformlythroughout the imaging volume. The degreeto which this is achieved depends primarilyon the design of the RF coil. Critical Performancespecifications include the maximum amountof power that the RF power amplifier iscapable of producing.
Remember, the flip angle is proportional toboth the duration and the amplitude of theRF pulse. Furthermore, the linearity of thisamplifier is critical. A linear amplifier is onein which a change in the amplitude of theinput signal leads to a directly proportionalchange in the amplitude of the output signal.RF amplifier non-linearities yield flip angleerrors as well as distortion of the shape of
an excited slice.The Receiver
The task of the MR receiver can be appreciatedwhen it is realized that the signal resultingfrom nuclear transverse magnetization is approx-imately one billionth that of the transmitted
RF power. A simplified design of an MR receiveris given in(FIG. 20).
Transverse magnetization induces an ACcurrent in the RF coil used for reception;this coil may or may not be the same RF coilused for production of the B1 field. The RFsignal, which is approximately at the Larmorfrequency for the B0 field is amplified by afactor of 104 to 105 by the RF preamplifier.It is technically quite inconvenient to workat these high frequencies. The ultimate functionof the receiver is to correctly represent theamplitude, periodicity and the phase of the
incoming MR signal in computer memory.For this purpose, it is only necessary to measurethe MR signal relative to a known standard.
The standard used is a RF source called thelocal oscillator, which in fact is often a portionof the RF signal from the frequency synthesizer
used for transmission. The mixer then yieldsa signal which is the difference between theRF transmitted and the signal received. Thisdifference signal is in the range of audiofrequencies (AF). It is this range of frequen-cies which are of concern for the receiverbandwidth.
C O N T I N U E D
C H A P T E R 2
8/3/2019 MR Physics Primer
45/98
FIGURE 20 Block diagram of an MRreceiver. Transverse magnetizationinduces an AC current in the RF coilwhich is amplified. This signal ismixed with a reference RF signal from
the local oscillator; this oscillatormay actually be the frequency synthesizer
used for RF transmission in FIGURE 19(not true for off-center FOV). The lowfrequency (AF) signal which is thedifference between the incoming RFand the local oscillator RF is thenamplified, digitized and stored in
computer memory.
B A C K
RF COIL
RF PREAMPLIFIER
MIXERS AND FILTERS
AF AMPLIFIERAND FILTERS
ANALOG-TO-DIGITAL
COVERTER
(ADC)
RF
AF
RF
AF
COMPUTER
COMPUTER MEMORY
BINARY DATA
The AF signal is amplified by a factor of 10 tioning of computing power. Therefore,
C H A P T E R2
http://goback/http://goback/8/3/2019 MR Physics Primer
46/98
g p yto 1,000 by an AF amplifier. The signal is nextdirected to an analog- to-digital converterwhich converts the AF signal into a series ofbinary numbers. These numbers are thenstored in computer memory for later manip-ulation (signal averaging and Fouriertransformation).
The most critical design feature of thereceiver is the combination of the quality ofthe RF coil and RF preamplifier. These twocomponents predominantly determine theamount of system noise added to the MRsignal. Of somewhat lesser importance forimaging is the precision of the ADC; 12-bitresolution is usually sufficient for imaging.
The Computer System
A modern MR instrument imager has severalcomputers linked by a communications network.For example, the current Signa system hasfour computers: a host computer, an arrayprocessor, and two specialized computerswhich are the status control module (SCM)
and the pulse control module (PCM). It isnot necessary to have this particular parti-
g p g pthe features of a MR computer system asa whole will be discussed here.
Core memory is directly accessed by the central
processing unit(s) (CPU). This memory mustbe sufficiently large to contain all of theinstructions and waveforms for one pulsesequence, an entire raw image data set, anda certain amount of operating software. Theremaining software and data requirementscan be met with disk memory.
An array processor is needed in order toaccomplish image reconstruction quickly.This implies that the array processor requiresdirect access to at least enough memory tocarry-out reconstruction of an entire image,otherwise disk access operation becomesrate-limiting. Since pulse sequences mustexecute in real time,, the computer systemmust give top priority to pulse sequenceinstruction execution. The receiver ADCmust have buffered memory access to ensurethat incoming data can be stored quickly
enough that data are not missed or lost.C O N T I N U E D
Long-term data storage (archiving) is axis(FIG. 21). Input of RF energy consisting of
C H A P T E R 2
8/3/2019 MR Physics Primer
47/98
g g ggenerally relegated to streaming tape.
The computer system described here is a mini-mal configuration. In actual practice, more
powerful systems are employed in order toease prescriptions and routine operations.
In the following discussion of the imageacquisition process, we will concentrate onthe most commonly implemented clinicaltechnique, i.e. two-dimensional Fourier trans-
form imaging utilizing spin-warp encodedspin echoes.(REFS. 58, 23).
SLICE SELECTIVE EXCITATION
In 2D-imaging schemes, signal response in thethird spatial dimension needs to be restricted.
This is accomplished by selectively exciting(converting longitudinal magnetization intotransverse magnetization) only spins in a welldefined slice of tissue within the imaging volume.This is accomplished by imposing a gradienton an axis perpendicular to the chosen sliceplane, which causes a linear variation of
potential resonance frequencies along that
p gy ga narrow range of frequencies (RF bandwidthdenoted as F) excites only those spins alongthe slice selection axis whose resonance frequen-cies, as dictated by the gradient, correspondto the frequencies present in the RF. Afterthe RF pulse, the slice selection gradient isturned off, and signals emanating from thechosen slice can be detected.
Quantitatively, the thickness of the excitedslice (dsl) in cm is related to the gradientamplitude Gslice and RF bandwidth F as follows:
[6] F = H * Gsl * dsl
For example, suppose that without any gradientall protons resonate at 64.000 MHz and that the
RF covers the range 64.001 MHz to 63.999 MHz.The RF bandwidth (F) is 0.002 MHz 2000 Hz.If a gradient amplitude of 0.5 Gauss/cm isimposed and the RF pulse is issued, the thick-ness of the excited slice is:
2000 Hz = 0.94 cm
4257 Hz/Gauss x 0.5 Gauss/cmC O N T I N U E D
C H A P T E R2
A B
8/3/2019 MR Physics Primer
48/98
FIGURE 21 Slice selective excitation is accomplished by the use of narrow bandwidth(F) RF in combination with a gradient along the slice axis. A and B show two possiblestrategies for variation of slice thickness. In A the gradient amplitude is varied, while inB the gradient amplitude is constant but F is changed. In C, different slice locations are
chosen by changing the RF center frequency (F0).
B A C K
Fa Fb
F0
F0 (b)
F0 (a)
aF
F
dsl (b)
dsl (a)
F
F0
Ga
Gb
b
F0
dsl (b)
dsl (a)
G
G
A B
C
Position along the slice axis
Resonance
Frequency
Resonance
Frequency
Resonanc
e
Frequency
If a thinner slice is desired, two options becomeid f i [6] i h ( ) h
This, however, raises yet another question.l i l i ff i
C H A P T E R 2
http://goback/http://goback/8/3/2019 MR Physics Primer
49/98
evident from Equation [6]: either (a) the RFbandwidth must be decreased or (b) the gradientamplitude must be increased.
Lets assume a single slice has been excited.But which slice? And at which location alongthe gradient axis? As noted in the previoussection, the gradient coils are constructedsuch that the zero point of the gradient is amagnetic center (the isocenter) of the magnet.This means that for any of the three gradientsat any amplitude, B0 at isocenter is unchanged.Along a given axis, the gradient causes a linearincrease of B0 on one side of isocenter, anda linear decrease of B0with increasing distancefrom the other side of isocenter.
Now, the location of the excited slice can bedetermined. Since the center frequency of theRF (F0) was equal to the resonance frequencyof protons in the absence of a gradient, andsince at isocenter there is no change to B0when a gradient is on, the slice excitedabove was located at isocenter + 0.47 cm.
How can one selectively excite an off-isocenterslice? Again there are two options: (a) changethe position of the zero point of the sliceselection gradient with respect to isocenter,or (b) change the center frequency of theRF to correspond to a resonance frequencywhich is either higher or lower than the protonresonance frequency without gradients. Practicalconsiderations force the choice of the latteroption. This method of offsetting a slice from
isocenter is also easy to examine quantitatively.If the same slice thickness, gradient amplitudeand bandwidth (F) as in the above exampleare employed, then the needed change for theRF center frequency (F0) is expressed by:
OFFSET * F[7] F0 =
dsl
where offset is the distance from isocenterfor the center of the desired slice.
C O N T I N U E D
For example, if the desired slice location is3 76 f i h h RF
a range of frequencies bore a rather stringenti li d i h i l
C H A P T E R2
8/3/2019 MR Physics Primer
50/98
+3.76 cm from iso-center then the center RFfrequency is changed by:
3.76 cm x 2000 Hz
F0 = = + 8000 Hz0.94 cm
Now the RF covers the range 64.009 MHzto 64.007 MHz.
There is one more issue in the slice selectionprocess that merits discussion.
If one could examine the excited slice and itsprofile edge-on, how would it appear? Onemight hope that the slice profile would berectangular; however, without special precautionsthis would not be the case. It is necessary toinsure that the flip angle is uniform across
the slice If RF at frequency = F0 is just switchedon for some period of time and then switchedoff, the flip angle will notbe the same at alldepths in the slice(FIG. 22). The nonuniformityof flip angle across the slice is a consequenceof the variation in RF amplitude at differentfrequencies (depths in the slice). We now see
that earlier statements concerning RF covering
implied assumption: there is an equal amountof RF power input for all frequencies within F,and no power outside of this range.
The FT can point to the solution of this problem.Note that in(FIG. 22A), the rectangular pulseof RF is a description of amplitude versus time,while its corresponding plot of RF power distri-bution is amplitude versus frequency. This shouldsound familiar. Indeed the FT of a rectangularpulse envelope is this curve defined by thefunction sin x/x called a sinc waveform. Dueto the aforementioned reciprocity betweenthe time and frequency domains, the solutionsuggested is as depicted in (FIG. 22B). If a rectan-gular frequency domain profile is desired, thenthe FT of a rectangle, namely the sinc shape
is the needed time domain description of theRF pulse. In practice then, the RF pulse offrequency = F0 is multiplied by the sinc wave-form before sending the pulse to the RF coilin the magnet. We have seen how to confineexcitation to a single slice in the imagingvolume.
C O N T I N U E D
FIGURE 22 (A) Although the reasons are not
C H A P T E R
2
RF of Frequency F0
ExcitationPower
8/3/2019 MR Physics Primer
51/98
intuitively obvious, a short burst or pulse of singlefrequency RF does not result in deposition of RFpower at just one frequency. Instead, the RFpower is spread over a range of frequenciescentered at F0. If such a pulse of RF were usedfor slice selection, the variation of RF poweracross the resonance frequencies containedin the slice would yield variations in flip angleacross the slice. (B) This situation is avoidedby using a sinc shaped RF pulse to give a
rectangular RF power spectrum. (C) Sinc pulsesare incorporated into a slice selective spin echosequence. Note the standard schematic represen-
tation of gradient action. The height of a gradientpulse represents the amplitude or slope of thegradient, and the width its duration. Whether
the gradient causes increasing or decreasing
B0 when moving in a positive direction alongthe gradient axis is indicated by a pulse up ordown. The small negative-going lobe of Gsliceaccounts for dephasing which occurs during
the slice selective 90 pulse.
B A C K
A)
B)
C)
RF of Frequency F0
F0
Time
Amplitude AmplitudeFT
FT
Time
Frequency
Frequency
PowerSpectrum
F0
F0
0
RF
Gslice
Receiver
Echo
90180
TE/2 TE/2
F=1/
F +1/0
In fact, since spin-echoes are to be used, twoselective RF pulses a 90 pulse and a 180 pulse
along one of the two principal axes of the planeduring the period when the receiver is on
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
52/98
selective RF pulses, a 90 pulse and a 180 pulse,are employed to obtain a slice selectivespin-echo.
FREQUENCY ENCODING
The next task is encoding the image informationwithin the excited slice. The image informationsought is actually the amplitude of the MRsignal arising from the various locations in theslice. Two distinct processes are used for encod-
ing the two dimensions, called frequencyencoding and phase encoding. Frequency encod-ing will be discussed first.
The general strategy for gaining spatial infor-mation along one axis of the image plane isshown schematically in (FIG. 23A). For reasons
of sensitivity, it is desirable to have the receiveron only while the echo is present, and to havethe center of the echo form in the middle ofthis acquisition window. This action, in com-bination with slice selection, would not yieldinformation about distribution of spins withinthe slice, because all positions would resonate
at the same frequency. Imposition of a gradient
during the period when the receiver is on,causes the signal received to be an interferencepattern arising from the various precessionalfrequencies of the spins along the gradientaxis, hence the name frequency encoding Thisgradient is sometimes referred to as the read,read-out, or frequency-encoding gradient.The FT of the signal acquired in the presenceof the read gradient is an image of the pro-jection of the slice onto the read gradient
axis.(FIG. 13
) & (FIG. 15
)If only the read gradient pulse were playedon this axis, severe dephasing of the echoand concomitant loss of signal intensity wouldbe anticipated. In order to avoid this, anothergradient pulse, termed a dephaser, is alsoimplemented along the frequency encodingaxis. Note that the area of the dephaser gradientpulse is one half that of the read gradient.The dephaser changes the phase of transversemagnetization by amounts which are propor-tional to position along this axis(FIG. 23B).
C O N T I N U E D
FIGURE 23 Frequency encoding. (A) The
C H A P T E R
2
TE/2 TE/2
8/3/2019 MR Physics Primer
53/98
frequency encoding gradient is played alongone of the two principal axes with the selectedslice. The read gradient pulse causes the fre-
quencies contained within the spin echo tobe proportional to the positions of respondingspins along the axis of the frequency encodinggradient. In order to avoid severe dephasingof the echo due to the read gradient, a dephas-er of pulse is used. (b) Instead of representingphases by the direction of vectors in a circle
in the transverse plane, a useful conventionis a phase plot where the circle is representedon an axis running from + 180 to -180. Thedephaser causes a positionally dependentphase change as shown for three positions(FIGURE 14). The 180 pulse reverses thesephases, and the first half of the read gradient
causes rephasing; all positions are in phaseat echo time.
B A C K
A)
B)
RF
Gslice
Receiver
Echo
Gfrequency encode
Phase
Dephaser Read
90180
180 TE
The 180 pulse inverts this phase distribution,just as it did in the discussion of spin-echo
it is necessary to review the action of the MRreceiver and examine the details of signal
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
54/98
just as it did in the discussion of spin-echoformation. The action of the first half of thegradient over the acquisition window now actsto compensate the phase shift caused by thefirst gradient pulse on this axis. In this manner,complete rephasing occurs at time TE, i.e. inthe center of the acquisition window.
The details of the frequency encoding pro-cedure dictate the field of view along thisaxis: (FOVf).
[8] Gf FOVf = BW
Where Gf is the amplitude of the frequency-encoding gradient, and BW is the receiverbandwidth. Note that Equation [8] is directlyderived from the Larmor equation. The receiver
bandwidth should not be confused with theRF bandwidth discussed in the previous section,although the relationships between the variousquantities are closely analogous in the twosituations.
In order to gain an understanding of receiver
bandwidth and its role in determining the FOV,
receiver, and examine the details of signaldigitization.
Within the receiver, the incoming RF signal
is converted to a much lower (AF) frequencywhich is the difference between the RF trans-mitted and that received. This differencesignal is digitized by sampling the voltage ofthe signal at discrete intervals and then repre-senting these voltages as digital numbers tobe used by the computer(FIG. 24). Sampling
theory dictates that in order to gain a correctdigital representation of the frequency of asinusoidal waveform, it is necessary to samplethe waveform at least twice per cycle.
Thus, it is the rate at which the signal is sampledwhich determines the maximum interpretable
frequency in the signal. This maximum frequencyis called the Nyqust frequency. Frequenciespresent in the signal which are higher than theNyquist frequency will be misrepresented indigital form, and will appear to be contributionswhich are lower than the Nyquist frequency.This is the cause of wrap-around artifacts.
C O N T I N U E D
C H A P T E R
2
8/3/2019 MR Physics Primer
55/98
FIGURE 24 A sine wave (solid line) is sampled at the times of the open circles andthe amplitudes at those times are digitized for computer storage. However, if the sine
wave is not sampled at least twice per cycle (closed circles), the computer representationof the sine wave gives an erroneous impression of the waves frequency.
B A C K
Amplitude
Time
The effective range of frequencies that canbe properly detected (receiver bandwidth) is
Intuitively, we see that the spatial resolutionalong this axis must be related to the distance
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
56/98
be properly detected (receiver bandwidth) iscontrolled by the digital sampling rate, whichin turn is determined by the number of pointson the signal to be digitized and the length
of time that the receiver is on. Therefore:
[9] BW = N f / T
Where N f is the number of complex points*sampled, and T is the sampling time.
As an example, let us examine the defaultvalues implemented on the Signa system. Allavailable matrix sizes use 256 complex points inthe frequency encoding dimension, and acqui-sition window duration 8 msec. The receiverbandwidth is:
256/.008 = 32.000 Hz = 16 kHz)*
BW = 2 x 0.008 sec
The FOVf is adjusted through variation ofthe amplitude of the read gradient (G f ).If Gf= 05 Gauss/cm, then:
FOVf = 1600 Hz/ 4257 Hz/Gauss x 0.5 Gauss/cm = 7.51 cm
Clearly, ifGf is increased, then FOVfwill decrease.
along this axis must be related to the distancecovered in this image dimension (FOVf) andthe number of data points describing thisdimension. From Equations [8] and [9], the
pixel size along the frequency encoding axis(FOVf/Nf) may be derived, giving:
[10] FOVf / N f = 1 / (Gf T )
The factor of two in the definition of pixel sizeresults from the fact that half of the pointsafter FT only give additional phase information.Equation [10] shows that there are two ways toincrease the resolution: (a) increase Gf, causingFOVfto decrease, or (b) increase both NfandT by the same factor which leaves BW andFOVfunchanged.
* A complex point of measured signal consists of twonumbers which describe the vector componentsalong each of the two principle axes.
Rather than sampling frequencies between 0 and32 kHz, quadrature phase detection allows examinationof frequencies from 16 kHz to +16 kHz relative tothe local oscillator frequency.
C O N T I N U E D
PHASE ENCODING
Th f f di i ld
sition window, it cannot affect the detectedfrequencies. However, as we have seen previously,
C H A P T E R
2
8/3/2019 MR Physics Primer
57/98
The process of frequency encoding yields,after FT, a projection of the image plane ontothe read axis. As stated in the section on
Fourier transformation, three pieces of infor-mation are conserved: frequency, amplitudeand phase. In the projection, variations infrequency denote position along the read axis.And variations in amplitude yield informationon the total signal intensity contained in thecolumn represented by each point along the
projection. Note, however, that variation inphase has not thus far been used to provideimage information. In order to produce atwo-dimensional image of the slice, one couldcause a systematic variation in phase whichwould encode the spatial information alongthe one remaining principal axis of the
image plane.
(FIG. 25) shows a complete 2D-imaging pulsesequence. The only addition to the pulsesequence relative to that considered previouslyis a single gradient pulse on the third gradientaxis (phase encoding axis). Since this phase
encoding gradient is not on within the acqui-
frequencies. However, as we have seen previously,the phase change of transverse magnetizationdue to this gradient pulse will be preservedin the form of phase memory. The induced
phase change is proportional to the amplitudeand duration of the gradient times the positionof spins along that axis.
Implementation of phase encoding is accom-plished as follows. The complete pulse sequenceis played out many times (typically 128 or 256
times) and the resulting signals are storedseparately. The only variation from one acqui-sition to the next is the amplitude the phaseencoding gradient which is changed in a step-vfashion. Separate Fourier transformation ofeach of the data sets (views) yields a setprojections onto the read axis These projectionsare expectedly identical to one another withrespect to frequency but not with respect to phase.
If this were x-ray CT, collecting a set of viewswhich we all projections onto the sameaxiswould be a pointless exercise.
C O N T I N U E D
C H A P T E R
2
TE/2 TE/2
8/3/2019 MR Physics Primer
58/98
FIGURE 25 The final dimension of spatial information is obtained by phase encoding.Each view is obtained using a different amplitude for the phase encoding gradient
lobe. The action of this gradient is still remembered at echo time as phase memory.
B A C K
90
180
RF
Gslice
Receiver
Gfrequency encode
Gphase encode
However, if one were to choose any givenposition of one of these MR views, and then
a discrete digital sampling of an interferencepattern. Therefore, the same sampling theory
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
59/98
pfollow the phase at that point progressingfrom view view to view, variation would be noted.This variation is another interference pattern.
Following a different point from view to viewreveals a different interference pattern. Sincethe only change in the pulse sequence fromview to view is the amplitude of the phaseencoding gradient, the noted interferencepatterns reflect the sum of phase changesalong the phase encoding axis. Another set
of FTs is certainly indicated.
A data set consisting of the first point fromevery projection is constructed and subjectedto FT(FIG. 26).Another data set is assembledfrom the second point on every projection,Fourier transformed and stored separately.
Then, all of the third points are used, etc.The result is a 3D plot of signal amplitudeversus location on the frequency and phaseencoding axis. If amplitudes are convertedto gray scale, the result is the image of the slice.
Finally, let us consider phase encoding quanti-
tatively. A data set formed by taking the samedata point from each of a set of views, represents
p p g yprinciples which were applied in the frequencyencoding dimension, also need to be consideredfor phase encoding. Specifically, the requirement
for sampling at least twice per cycle must bemet. To phase encode one cycle requires a 360phase change, necessitating at least one samplefor every 180 phase change. This means thatthe two edges of the FOV in the phase encodingdimension correspond to those positions alongthe phase encoding gradient axis when each
incremental change in the gradient amplitudecauses a 180 phase change. At positions betweenthese two points, the phase changes by lessthan 180 per view. In analogy to Equation[8]we can write:
[11] GP * FOVP * TP = NP *
where Np is the number of phase encodings(views), Tp is the duration of the phase encodinggradient pulse, FOVp is the FOV in the phaseencoding dimension and Gp is the maximumamplitude of the phase encoding gradient.
C O N T I N U E D
FIGURE 26 Schematic representation of imageformation by 2D-FT. (A) This represents a slice
C H A P T E R
2
8/3/2019 MR Physics Primer
60/98
y pthrough an object containing 3 vials of water(labeled 1, 2 and 3). The projection onto thefrequency encoding axis is shown behind the slice.
(B) Collection of MR data from the slice yieldsa set of spin echoes (views). Note that each echois produced from the entire slice. (C) Fourier trans-formation of all of the views yields a set of pro-jections of the slice onto the frequency encodingaxis. The oscillations underneath the envelopeof each projection represent one-half of the phaseinformation. (D) A new data set is assembled from
the columns in C (added views have been filledin). Some of the rows of the new data set containno signal because these rows correspond to posi-
tions along the frequency encoding axis wherethere is no water. Two of the depicted rows docontain signal. The lower of these two rows is asignal containing a single frequency, while the
upper row is an interference pattern of two sinu-soids. (E) FT of all of the rows in D produces theimage. The image needs to be rotated and flippedin order to correspond to the slice depicted in A.Note that the data would have a more complexappearance if the vials of water were larger thanone pixel each; resonances from one portion ofa vial would interfere with resonances from
other portions.B A C K
A)
collectMR data
phaseencoding
frequencyencoding
frequency
view #
view #
time
FT
FT
FT
FT
FT
FT
FT
FT
FT
FT
FT
FT
FT
FT
C)
D)
B)
E)
1
2 3
2 1
3
The spatial resolution can be expressed as thepixel size which, in phase encoding direction,
computer processing interposed between rawdata and image. The 2D-FFT is central to this
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
61/98
is equal to the ratio FOVp/Np for which weobtain from Equation [11].
[12] FOVP/ NP = / (GPT )
Hence, we can lower pixel size by increasingthe amplitude of the phase encoding gradient(in analogy to the frequency-encoding gradientwhich controls the pixel size in the read directionof the image). Alternatively, however, we can
increase the duration of the phase encodinggradient.
RECONSTRUCTION
Reconstruction is a term brought to MR fromCT, where it refers to projection reconstruction
which is the mathematical process used totransform raw data into a CT image. As wehave seen, the two-dimensional Fourier trans-form method used in MR is a very differentkind of process than projection reconstruction.
In MR, the word reconstruction has a more
general connotation, and denotes all of the
processing, but it also includes baseline corrections,mathematical weighting of the raw data forartifact reduction and other purposes, post-
2D-FFT data filtering for edge enhancementor smoothing, magnitude calculation, correctionsfor gradient imperfections, scaling for imageprocessing, and image reorientation (rotating,and flipping) for a standardized presentationformat.
Let us follow the processing from raw datato image for an MR image. (FIG. 27A) showsthe raw data for the image in (FIG. 27C),while(FIG. 27B) shows an intermediate step afterthe first dimension of FT, i.e. all of the viewshave been transformed in frequency-encodingdirection. In all three figures the phase infor-mation has been discarded; the brightness ateach point represents signal amplitude. Highsignal is represented as white (note that thisis the opposite of the convention used inCT, where white means high attenuation).
C O N T I N U E D
C H A P T E R
2
8/3/2019 MR Physics Primer
62/98
FIGURE 27A Reconstruction. (A) This is the not-so-mysterious k-space data or raw data.Each view is a spin echo; the middle views have the greatest amplitude because they
were obtained with the weakest amplitudes of the phase encoding gradient.
B A C K
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
63/98
B A C K
FIGURE 27B Reconstruction. (B) The FT of any one of the views gives a projectiononto the frequency encoding axis. View No. 128 is displayed on the right.
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
64/98
B A C K
FIGURE 27C Reconstruction. (C) The second dimension of FTs yields the image.
MULTISLICE ACQUISITION
Thus far the acquisition of image data for only
The total acquisition time for one image(slice) would be 128 views x 2 excitations perview x 1000 ms per excitation 256 000 ms
C H A P T E R
2
http://goback/http://goback/8/3/2019 MR Physics Primer
65/98
us a t e acqu s t o o age data o o ya single slice has been considered. The questionnaturally arises: How much time is needed
to acquire these data? The answer is:
[13] Total Acquisition Time = Number of viewsx Number of excitations per view x TR
The number of views collected for an image isdefined by the selected matrix size. Typical
matrix sizes are: 256 x 128, 256 x 192, and256 x 256.
The second number of each pair representsthe number of views. Clearly, as discussed inmore detail below, if one were to collect allthe image data from one slice, and then repeatthe entire acquisition for the same slice, thetwo data sets could be added together in orderto gain SNR. This is the process which is alludedto by the term Number of excitations per view,also abbreviated as NEX. A typical set of imagingparameters might be: TR = 1000 ms, TE = 25 ms,NEX = 2, Matrix = 256 x 128.
view x 1000 ms per excitation = 256,000 ms =256 sec = 4 min 16 sec
Does this mean that