Embed Size (px)
Citation preview

Module Handbook
‘Master of Science in Robotic Systems Engineering’ (M.Sc.)

1
Table of Contents
Compulsory Courses – First Term ......................................................................................... 3
Module: Robotic Systems ................................................................................................... 3
Module: Advanced Robotic Kinematics and Dynamics ....................................................... 7
Module: Control Engineering ............................................................................................ 11
Module: Electrical Drives .................................................................................................. 14
Module: Machine Learning ............................................................................................... 17
Module: Computer Science in Mechanical Engineering II ................................................. 21
Module: German Language Course ................................................................................. 24
Compulsory Courses – Second Term .................................................................................. 27
Module: Multibody Dynamics ............................................................................................ 27
Module: Computer Vision I ............................................................................................... 31
Module: Robotic Sensor Systems ..................................................................................... 35
Elective Courses – Second Term ......................................................................................... 38
Module: Computer Vision II .............................................................................................. 38
Module: Production Metrology .......................................................................................... 41
Module: Machine Dynamics of Rigid Systems .................................................................. 45
Module: Industrial Logistics .............................................................................................. 49
Module: Artificial Intelligence and Data Analytics for Engineers ........................................ 52
Module: Factory Planning ................................................................................................. 55
Module: Summer School – Advanced Topics in Robotic Systems .................................... 59
Engineering ...................................................................................................................... 59
Compulsory Course – Third Term........................................................................................ 61
Module: Simulation of Robotic Systems, Sensors and Environment ................................. 61
Elective Courses – Third Term ............................................................................................. 65
Module: Introduction to Artificial Intelligence ..................................................................... 65
Module: Advanced Machine Learning............................................................................... 68
Module: Power Electronics ............................................................................................... 71
2
Module: Processes and Principles of Lightweight Design ................................................. 74
Module: Applied Numerical Optimization Engineering ...................................................... 77
Module: Numerical Methods in Mechanical Engineering .................................................. 81
Module: Strategic Technology Management..................................................................... 85
Module: Finite Element Methods for Engineers ................................................................ 89
Module: Mechatronics and Control Techniques for Production Plants .............................. 93
Module: Advanced Control System .................................................................................. 97
Elective Courses – Fourth Term ........................................................................................ 100
Module: Internship (Industrial Track) .............................................................................. 100
Module: Research Project (Academic Track) .................................................................. 102
Compulsory Course – Fouth Term ..................................................................................... 104
Module: Master Thesis ................................................................................................... 104

3
Compulsory Courses – First Term
Module: Robotic Systems
Module Robotic Systems
Module level Master
Subtitle RS
Lecture See list of lectures and examinations of the module
Semester 1
Person in charge apl. Prof. Dr.-Ing. Mathias Hüsing
Lecturer apl. Prof. Dr.-Ing. Mathias Hüsing
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination , Lecture , Exercise
Workload Total 150hmin, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
-none-
Learning objectives
Robotic Systems
Overall goal: The students have a profound comprehension of the fundamentals of robotic systems as well as the components used to build and run a robotic system. Thus, they are capable of comprehending, describing and analyzing robotic systems and components. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
have a profound comprehension of the fundamentals of robotic
systems as well as the components used to build and run a robotic

4
system. Thus, they are capable of comprehending, describing and
analyzing robotic systems and components.
Abilities / Skills / Competencies:
Students
got a brief overview about existing and future robotic systems. The
students are capable of running through the development and
implementation process of a mechatronic robotic gripper;
analyse the kinematic structure of robots as well as grippers.
Furthermore, they have the knowledge and the ability to launch and
use general robotic components (stepper motor, sensors) and control
(via microcontroller) the kinematic structures to complete it to a full
mechatronic system;
use general methods of structural synthesis and follow the
development guidance for mechatronic systems (VDI 2206).
Content
Robotic Systems
1st Lecture Introduction to Industrial Robots (History of Robotics, Definition of Robotics, World Robotic Market, Requirements and application scenario, Essential construction elements of an industry robot, Category of robotics, Robotic Companies and StartUps, Future smart and intelligent Robots)
2nd Lecture Introduction to Advanced Robots (Advanced, Space, Food, Medical, Home Cleaning Robots, Mobile Manipulators, Intelligent Vehicles, World Robotic market: Service Robotics)
3rd Lecture General Robot Structures (Joints and Motion, Degree of Freedom, Workspaces, Different Classifications)
4th Lecture Structural Synthesis (Selection of robotic structures / quantitative optimization)
5th Lecture Robot End-effector Technology (Types and function of different End-effector technologies)
6th Lecture Gripper Technology (Characteristics of Objects, The Grasp, Gripper Mechanisms, Merit Indices, Design)
7th Lecture Components of Robotic Systems (Gears)
8th Lecture Components of Robotic Systems (Actuators)
9th Lecture Components of Robotic Systems (Sensors and Vision Systems)
10th Lecture Components of Robotic Systems (Control and Safety Architecture)
11th Lecture Properties and Benchmarking (Performance evaluation)
12th Lecture Mobile Manipulators (Types of Wheels, Kinematic Constrains, Robot Configuration Variables, Characterization of robot mobility, Wheeled Robot Structures)
13th Lecture Control and Path Planning (Artificial Intelligence)
Media Lecture and Exercise slides

5
Literature
- Siciliano, B.: Robotics; Modelling, Planning and Control, Springer International Publishing, 2009, eBook ISBN 978-1-84628-642-1, DOI 10.1007/978-1-84628-642-1
- Siciliano, B. (Hrsg.): Springer Handbook of Robotics, Springer International Publishing, 2016, eBook ISBN 978-3-319-32552-1, DOI 10.1007/978-3-319-32552-1
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Robotic Systems 5 0 0
See examination options
Lecture: Robotic Systems
0 2 45 0
Exercise: Robotic Systems
0 2 45 0
Teaching Unit / Examinations: Examination Robotic Systems
Title Examination Robotic Systems
Sub-title Exa RS
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Robotic Systems
Title Lecture Robotic Systems
Sub-title L RS
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Robotic Systems
Title Exercise Robotic Systems
Sub-title E RS
Semester 1

6
Connection to the curriculum
Compulsory Module

7
Module: Advanced Robotic Kinematics and Dynamics
Module Advanced Robotic Kinematics and Dynamics
Module level Master
Subtitle ARKaD
Lecture See list of lectures and examinations of the module
Semester 1
Person in charge Univ.-Prof. Dr.-Ing. Dr. h. c. (UPT) Burkhard Corves
Lecturer Univ.-Prof. Dr.-Ing. Dr. h. c. (UPT) Burkhard Corves
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
3
Requirements according to examination regulation
-none-
Learning objectives
Advanced Robotic Kinematics and Dynamics Overall goal: The students have a profound comprehension of the fundamentals of robotic kinematics and dynamics. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
have a profound comprehension of the fundamentals of robotic
kinematics and dynamics;
know the position, orientation and rotation matrix + homogeneous
transformations and coordinate systems;
recognise direct and inverse kinematics;
know how to use differential and inverse differential kinematics and
statics;
know the dynamic model calculations.

8
Abilities / Skills / Competencies:
Students
set up the algorithms that are necessary to calculate position,
velocities and accelerations of robotic systems and have a
comprehensive understanding of the mathematical descriptions of the
movement states;
deploy and use the DH-notation for robotic systems. At the same time,
they consider the requirements of engineering science for different
robotic structures;
select suitable robotic structures for the relevant handling tasks, to
recognise important parameters and describe them mathematically
correct to implement them into a programming;
program a robotic trajectory in joint and cartesian space and execute it
in simulations.
Content
Advanced Robotic Kinematics and Dynamics
1st Lecture Introduction of Robotic Systems (Industrial root brief introduction, Modelling, Planning and Control)
2nd Lecture Position, Orientation and Rotation Matrix (Pose of Rigid Body, Rotation Matrix, Composition of Rotation Matrices, Euler Angles, Axis and Angle, Unit Quaternion)
3rd Lecture Coordinate System/Homogeneous Transformations/Joints (Coordinate Systems, Homogeneous transformations, Joints)
4th Lecture Direct Kinematics – Serial/Parallel (Direct Kinematics --> Two planar arm, Denavit-Hartenberg Convention, Kinematics of typical manipulator structures)
5th Lecture Inverse Kinematics (Joint and operational space, workspace, redundancy, Inverse kinematics, Problems and Properties, Analytical and Numerical Solutions)
6th Lecture Differential Kinematics (Definition, geometric Jacobian, Jacobian for typical manipulator Structures, Kinematic singularities)
7th Lecture Inverse Differential Kinematics and Statics (Definition, Calculation methods, Jacobian transpose and statics, velocity and force)
8th Lecture Modelling of Dynamics Model (Direct and Inverse Dynamics definition, Mechanics, Modelling of a rotary drive system, Lagrange Formulation, Examples)
9th Lecture Notable Properties of Dynamic Model (Analysis, Properties, Extensions, Parametrization, identification, uses)
10th Lecture Newton-Euler Formulation (Derivative of a vector in moving frame, Dynamics of a rigid body, recursive algorithm)
11th Lecture Trajectory Planning in Joint Space (Path and Trajectory, Point-to-Point motion, Motion through a sequence of points)
12th Lecture Trajectory Planning and Optimization in Cartesian Space (Path Primitives. Position and Orientation Planning, Optimal Trajectory Planning)
13th Lecture Kinematic Control (Definition of robot motion control and kinematic control, joint and Cartesian space control)

9
14th Lecture Dynamic Control (Dynamic Model and its control properties, P/PD/PID control law)
Media - Lecture slides
- Exercise slides
Literature
- Siciliano, B.: Robotics; Modelling, Planning and Control, Springer International Publishing, 2009, eBook ISBN 978-1-84628-642-1, DOI 10.1007/978-1-84628-642-1
- Siciliano, B. (Ed.): Springer Handbook of Robotics, Springer International Publishing, 2016, eBook ISBN 978-3-319-32552-1, DOI 10.1007/978-3-319-32552-1
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Advanced Robotic Kinematics and Dynamics
5 0 0 120
Lecture: Advanced Robotic Kinematics and Dynamics
0 2 45 0
Exercise: Advanced Robotic Kinematics and Dynamics
0 2 45 0
Teaching Unit / Examinations: Examination Advanced Robotic Kinematics and Dynamics
Title Examination Advanced Robotic Kinematics and Dynamics
Sub-title Exa ARKaD
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Advanced Robotic Kinematics and Dynamics
Title Lecture Advanced Robotic Kinematics and Dynamics
Sub-title L ARKaD
Semester 1
Connection to the curriculum
Compulsory Module

10
Teaching Unit / Examinations: Exercise Advanced Robotic Kinematics and Dynamics
Title Exercise Advanced Robotic Kinematics and Dynamics
Sub-title E ARKaD
Semester 1
Connection to the curriculum
Compulsory Module

11
Module: Control Engineering
Module Control Engineering
Module level Master
Subtitle CE
Lecture See list of lectures and examinations of the module
Semester 1
Person in charge Univ.-Prof. Dr.-Ing. Dirk Abel
Lecturer Dipl.-Ing. Uwe Jassmann
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 90h, Lecture hours 30h, Self-study 60h
Lecture hours 30h
ECTS-Credit Points (CP)
3
Requirements according to examination regulation
Basic knowledge in mathematics as defined in the examination regulations.
Learning objectives
Control Engineering
After successfully completing this course, the student will have acquired the following learning outcomes:
Knowledge / Understanding:
Students
know, recognize and classify the most common linear control loop
elements;
understand the effects of feedback and apply different methods to set
up feedback elements (controllers) such that predefined control goals
are met.
Abilities / Skills:
Students
analyze dynamical, biological and biomedical systems and identify the
relevant causalities;
employ different mathematical descriptions of dynamical systems;

12
solve differential equations by means of Laplace transform;
assess of the stability of dynamical systems using different methods;
obtain, interpret and employ the frequency response of dynamical
systems.
Competencies
Students
show analytical thinking with respect to causality of dynamics system in real-world applications.
Content
Control Engineering
Functional diagrams
Linearization
Set up and solving of differential equations
Features in time domain of dynamical systems
Laplace transform and transfer function
Functional diagram algebra
Frequency response
Bode diagram and Nyquist plot
Linear control loop elements
Principle and goals of controller design
Steady state analysis and transient performance of a control loop
Controller setting rules
Stability of control loops: Nyquist stability criterion, phase margin, gain margin, controller design in bode diagram, algebraic stability criteria,
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Control Engineering
3 0 0
Max. 60 (oral) or 120 (written)
Lecture: Control Engineering
0 1 30 0

13
Exercise: Control Engineering
0 1 30 0
Teaching Unit / Examinations: Examination Control Engineering
Title Examination Control Engineering
Sub-title Exa CE
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Control Engineering
Title Lecture Control Engineering
Sub-title L CE
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Control Engineering
Title Exercise Control Engineering
Sub-title E CE
Semester 1
Connection to the curriculum
Compulsory Module

14
Module: Electrical Drives
Module Electrical Drives
Module level Master
Subtitle ED
Lecture See list of lectures and examinations of the module
Semester 1
Person in charge Univ.-Prof. Dr. ir. Dr. h. c. (RTU) Rik W. De Doncker
Lecturer Lecture: Univ.-Prof. Dr. ir. Dr. h. c. (RTU) Rik W. De Doncker
Exercise: Research Associates
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 120h, Lecture hours 45h, Self-study 75h
Lecture hours 45h
ECTS-Credit Points (CP)
4
Requirements according to examination regulation
none
Learning objectives
Electrical Drives
Overall goal: Understanding, modelling and control of electrical drives based on the most common electrical machine types. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know the working principals of the most common electrical machine
types;
know and understand the modelling of modern drive systems.
Abilities / Skills
Students

15
distinguish between dynamic control strategies such as field-oriented
and direct-torque control and their sensible applications;
recall the requirements of the different machines concerning sensors
and power electronics.
Competencies
Students
choose electrical machines and converter topologies based on
application requirements;
design electric drive trains and their control;
present complex relationships and are able to explain them to
experts as well as to a non-expert group of people.
Content
Electrical Drives
Electrical drives are used in many different fields: at home, in industry and for transportation. Dental drills as well as hybrid or fully electric vehicles and ships are powered by electrical motors. The advantages of electrical drives are that electricity is applicable almost everywhere and comparatively easy to decentralize, power and velocity are easy to control, the maximum machine torque is available at zero speed and wear and maintenance costs are low. Particularly due to their high efficiency, electrical drives score well. Since electrical drives consume about 60% of all electrical energy used in industry and gain more and more importance in the field of personal mobility, a huge amount of energy can be saved by an intelligent control of electrical motors. The above mentioned control of electrical motors is the topic of the lecture Electrical Drives. Subsequent to a short introduction to the mechanics of rotating systems the control of all common electrical machines (dc, synchronous, induction and switched reluctance machine) is presented. The universal field oriented (UFO) concept is explained which demonstrates the concepts of modern vector control and exemplifies the seamless transition between so called stator flux and rotor flux oriented control techniques. This powerful tool is used for the development of flux oriented machine models of rotating field machines. These models form the basis of UFO vector control techniques which are covered extensively together with traditional drive concepts. Attention is also given to the dynamic modeling of Switched Reluctance (SR) drives, where a comprehensive set of modeling tools and control techniques is presented. The lecture should appeal to students who have a desire to understand the intricacies of modern electrical drives without losing sight of the fundamental principles. It brings together the concepts of the ideal rotating transformer (IRTF) and UFO which allows a comprehensive and insightful analysis of ac electrical drives in terms of modeling and control. Extensive use is made of build and play modules which provide the student with the ability to interactively examine and understand the presented topics.
Media Presentation slides, scripts, exercises
Literature De Doncker, Pulle, Veltman: Advanced Electrical Drives
Lectures / Examinations
Title Code ECTS Workload (SWS / h)

16
Lecture h. (SWS)
Self-Study (h) Duration of Exam (min)
Examination: Electrical Drives
4 0 0 90
Lecture: Electrical Drives
0 2 30 0
Exercise: Electrical Drives
0 1 45 0
Teaching Unit / Examinations: Examination Electrical Drives
Title Examination Electrical Drives
Sub-title Exa ED
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Electrical Drives
Title Lecture Electrical Drives
Sub-title L ED
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Electrical Drives
Title Exercise Electrical Drives
Sub-title E ED
Semester 1
Connection to the curriculum
Compulsory Module

17
Module: Machine Learning
Module Machine Learning
Module level Master
Subtitle ML
Lecture See list of lectures and examinations of the module
Semester 1
Person in charge Univ.-Prof. Dr. sc. techn. Bastian Leibe
Lecturer Univ.-Prof. Dr. sc. techn. Bastian Leibe
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 60h
ECTS-Credit Points (CP)
6
Requirements according to examination regulation
It is advised to have knowledge in Linear algebra and probability theory and statistics
Learning objectives
Machine Learning
On successful completion of this module, students should be able to recall and explain the theoretical foundations and concepts underlying Machine Learning techniques, in particular:
Knowledge / Understanding
Students have a profound knowledge in;
Bayes decision theory
Probability density estimation: non-parametric vs. parametric methods
Maximum Likelihood vs. Bayesian estimation
Linear classifiers, least-squares classification, generalized linear classifiers, Fisher linear discriminant analysis, logistic regression
Empirical/structural Risk minimization, VC dimension
Support Vector Machine
Ensemble methods, Boosting, AdaBoost
Decision trees: attribute selection, Random Forests, extremely randomized trees, ferns

18
Probabilistic Graphical Models: Bayesian Networks, Markov Random Fields, and Factor Graphs; factorization; conditional independence;
Exact inference: belief propagation; junction tree algorithm; graph cuts algorithm.
Abilities / Skills
Students
derive, explain and apply the following practical machine learning methods and algorithms:
Probability density estimation: Maximum likelihood, Kernel/k-Nearest Neighbor density estimation, k-Means, EM algorithm for mixture-of-Gaussians estimations
Linear classifiers: Least-squares classification
Support Vector Machines
AdaBoost
Decision Trees
Random Forests
Sum-Product Belief Propagation
Junction Tree algorithm
Graph Cuts algorithm
Competencies Students
discuss the advantages and disadvantages of the covered machine
learning techniques;
find practical solutions to complex real-world machine learning
problems;
work on practical problems in a team.
Content
Machine Learning
The goal of Machine Learning is to develop techniques that enable a machine to "learn" how to perform certain tasks from experience. The important part here is the learning from experience. That is, we do not try to encode the knowledge ourselves, but the machine should learn it itself from training data. The tools for this are statistical learning and probabilistic inference techniques. Such techniques are used in many real-world applications. This lecture teaches the fundamental machine learning techniques that underlie such capabilities. In addition, it shows current research developments and how they are applied to solve real-world tasks. The detailed lecture topics include:
Basic concepts: Introduction to probability theory, Bayes decision theory
Probability Density Estimation: Parametric methods, maximum likelihood, mixture models, EM, nonparametric methods, histograms, k-NN, kernel density estimation
Discriminative Methods for Classification: Linear discriminants, statistical learning theory, support vector machines, model combination & ensemble methods, bagging, boosting, AdaBoost, decision trees, randomized trees, random forests and ferns, model selection

19
Probabilistic Graphical Models: Bayesian networks, Markov random fields, factor graphs, conditional independence, exact inference: message passing, Belief Propagation, junction tree algorithm, graph cuts
Media Lecture script in form of printed slides, Additional handouts for certain topics, Web page with supplementary material and exercises: http://www.mmp.rwth-aachen.de/teaching
Literature
C.M. Bishop, Pattern Recognition and Machine Learning, Springer, 2006
R.O. Duda, P.E. Hart, D.G. Stork, Pattern Classification, 2nd Edition, Wiley-Interscience, 2000
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Machine Learning 6 0 0 90
Lecture: Machine Learning
0 3 75 0
Exercise: Machine Learning
0 1 45 0
Teaching Unit / Examinations: Examination Machine Learning
Title Examination Machine Learning
Sub-title Exa ML
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Machine Learning
Title Lecture Machine Learning
Sub-title L ML
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Machine Learning
Title Exercise Machine Learning
Sub-title E ML
Semester 1

20
Connection to the curriculum
Compulsory Module

21
Module: Computer Science in Mechanical Engineering II
Module Computer Science in Mechanical Engineering II
Module level Master
Subtitle CSME II
Lecture See list of lectures and examinations of the module
Semester 1
Person in charge Prof. Dr.-Ing. Tobias Meisen
Lecturer Prof. Dr.-Ing. Tobias Meisen
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Written examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
-none-
Learning objectives
Computer Science in Mechanical Engineering II
Overall goal: Students gain the basic knowledge about computational methods in probabilistic robotics, which focus on popular algorithms from theory to implementation. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
obtain a comprehensive view of the current challenges in
development of mechatronic systems, which focuses on mobile and
stationary robotics;
are familiar with the fundamental concepts, tools and theories of
computational methods;
understand how to analyse and solve the interrelated problems of
computer science using these methods with practical consideration.

22
Abilities / Skills
Students
learn how to use the acquired methods in mechatronic systems for
different tasks correctly;
can identify the advantages and disadvantages of the various
procedures and assess them in a practical context.
Competencies
Students
find solutions for action planning in discrete and continue action
space;
find solutions for navigation in non-structured environment;
take advantages of probabilistic analysis for system state estimation
from noisy data;
design model based and learnable decision-making processes.
Content
Computer Science in Mechanical Engineering II
General introduction of intelligent mechatronic system
Noninformative and informative searching algorithms
Theory of probabilistic modelling
System state estimation I: Kalman Filter and nonlinear Kalman Filter
System state estimation II: Unscented Kalman Filter and Particle Filter
Decision-making processes
Trajectory optimization
Reinforcement Learning for mechatronic systems
Supervised and Unsupervised Learning for mechatronic systems
Tendency of Research of intelligent mechatronic system
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Computer Science in Mechanical Engineering II
5 0 0 120
Lecture: Computer Science in Mechanical Engineering II
0 2 45 0

23
Exercise: Computer Science in Mechanical Engineering II
0 2 45 0
Teaching Unit / Examinations: Computer Science in Mechanical Engineering II
Title Examination Computer Science in Mechanical Engineering II
Sub-title Exa CSME II
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Computer Science in Mechanical Engineering II
Title Lecture Computer Science in Mechanical Engineering II
Sub-title L CSME II
Semester 1
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Computer Science in Mechanical Engineering II
Title Exercise Computer Science in Mechanical Engineering II
Sub-title E CSME II
Semester 1
Connection to the curriculum
Compulsory Module

24
Module: German Language Course
Module German Language Course
Module level Master
Subtitle GLC
Lecture See list of lectures and examinations of the module
Semester 1
Person in charge -
Lecturer -
Language German
Assignment to the
curriculum Compulsory Module
Teaching form
Workshops to teach skills, with practice sessions; Self-study, Group
exercises; Action-learning, based on role-plays, simulations and
behavioural exercises
Grading Options:
a) Written exam (60-120 min., graded, 100%) or oral exam (15-45 min., graded, 100%)
b) Written exam (60-120 min., graded, 50%) and oral exam (15-45 min., graded, 50%)
Workload Total 60h, Lecture hours 30h, Self-study 30h
Lecture hours 30h
ECTS-Credit Points
(CP) 2
Requirements
according to
examination
regulation
-none-
Learning objectives
German Language Course
After successfully completing this course, the students will have acquired
the following learning outcomes:
Abilities / Skills
Students
communicate basic knowledge

25
on German Culture and Cultural Studies;
accomplish everyday
communication within university surroundings
(dormitory, cafeteria etc.);
offer prerequisites for culturally
adequate application documents for internships
(CV, letter of motivation).
Content
German Language Course
Getting to know someone
Introducing oneself
City explorations
Orientation in the city
Techniques: learning and remembering words
Buying groceries
Communication on the phone
Techniques: learning grammar systematically
Calendar, festivities
Holidays
Learning and forgetting
Learning psychology
German newspapers
Reading habits
When in Rome, do as the Romans do
Intercultural experience
Media
Geographic German studies
Inventions and progress
Between cultures
Environmental protection/problems
Project Europe
Job market Germany
Applications
CVs
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
26
Teaching Unit / Examinations:
Title Code Credit
Points
Workload (SWS / h)
Duration of
Exam (min) Lecture h.
(SWS)
Self-Study
(h)
Examination:
German Language
Course
2 0 0
See
examination
options
Lecture:
German Language
Course
0 1 15 0
Exercise:
German Language
Course
0 1 15 0
Teaching Unit / Examinations: Examination German Language Course
Title Examination German Language Course
Sub-title Exa GLC
Semester 1
Connection to the
curriculum Compulsory Module
Teaching Unit / Examinations: Lecture German Language Course
Title Lecture German Language Course
Sub-title L GLC
Semester 1
Connection to the
curriculum Compulsory Module
Teaching Unit / Examinations: Exercise German Language Course
Title Exercise German Language Course
Sub-title E GLC
Semester 1
Connection to the
curriculum Compulsory Module

27
Compulsory Courses – Second Term
Module: Multibody Dynamics
Module Multibody Dynamics
Module level Master
Subtitle MBD
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge Univ.-Prof. Dr.-Ing. Dr. h. c. (UPT) Burkhard Corves
Lecturer Univ.-Prof. Dr.-Ing. Dr. h. c. (UPT) Burkhard Corves
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h , Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
none
Learning objectives
Multibody Dynamics
Overall goal: The students have a profound comprehension of the fundamentals of multibody dynamics as well as the behaviour of vibratory mechanical systems. Thus, they are capable of comprehending, describing and analysing oscillation systems. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
have a profound comprehension of the fundamentals of multibody
dynamics as well as the behaviour of vibratory mechanical systems;
are capable of comprehending, describing and analysing oscillation
systems;

28
are familiar with the most important methods for calculating the
eigen-behaviour and the behaviour under force excitation for linear
oscillatory systems.
Abilities / Skills / Competencies:
Students
are capable of modelling and mathematically describing mechanical
oscillation systems in consideration of physical effects such as
elasticities, damping, friction, etc.;
form and linearize the non-linear equations of motion;
deduce the necessary methods and procedures from their acquired
knowledge for the synthesis and analysis of the analysed oscillatory
systems;
answer and solve comprehensive problems on the selection and
design of industrial vibratory systems;
interpret the results of calculations and simulations in a meaningful
way, especially considering possible simplifications in the performed
modelling.
Content
Multibody Dynamics
1 System modelling
• Specification of the systems components and physical effects
• Methods of approach for equivalent models
• Multibody systems
• Determination of the model parameters
• Mathematical description of oscillatory systems
2 Kinematics of multibody systems
• Position and orientation of bodies
• Translational kinematics
• Rotational kinematics
3 Equations of motion in minimal coordinates
• Newton-euler equations
• Lagrangian equations of 2nd kind
4 Equations of motion in absolute coordinates
• Position description of a body in absolute coordinates
• Constraints and constraint forces
• Setting up the equation of motion
• Transfer of the DAE to ODE
5 Equations of motion of linear oscillation systems
• Linearization of equations of motion using taylor expansion
• Solution of linear equations of motion using the eigenvalue approach
• Linear mechanical systems with harmonic excitation

29
6 Setting up the state equations
• Common mechanical systems
• General mechanical systems
7 State equations of linear oscillation systems
• Solution of the state equations with the eigenvalue formulation
• Solution of the state equation of linear time-invariant vibrating systems by means of the fundamental matrix
• Comparison of the fundamental matrix solution statement with the method of eigenvalues
• Linear mechanical systems with step excitation
• Linear mechanical systems with harmonic excitation
• Linear mechanical systems with periodical excitation
Media e-Learning L2P (Moodle), Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Multibody Dynamics 5 0 0 120
Lecture: Multibody Dynamics
0 2 45 0
Exercise: Multibody Dynamics
0 2 45 0
Teaching Unit / Examinations: Examination Multibody Dynamics
Title Examination Multibody Dynamics
Sub-title Exa MBD
Semester 2
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Multibody Dynamics
Title Lecture Multibody Dynamics
Sub-title L MBD
Semester 2

30
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Multibody Dynamics
Title Exercise Multibody Dynamics
Sub-title E MBD
Semester 2
Connection to the curriculum
Compulsory Module
31
Module: Computer Vision I
Module Computer Vision I
Module level Master
Subtitle CV I
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge Univ.-Prof. Dr. sc. techn. Bastian Leibe
Lecturer Univ.-Prof. Dr. sc. techn. Bastian Leibe
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 60h
ECTS-Credit Points (CP)
6
Requirements according to examination regulation
It is advised to have knowledge in Linear algebra Basic and probability theory and statistics
Learning objectives
Computer Vision I
Overall goal: The goal of Computer Vision is to develop methods that enable a machine to analyze and "understand" the content of images and videos. This lecture teaches the fundamental Computer Vision techniques that underlie such capabilities. In addition, it shows current research developments and how they are applied to solve real-world tasks. The detailed lecture topics include After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
have an extended knowledge in image processing: binary image
processing, linear filters, image derivatives, image pyramids, edge
detection, segmentation, graph theoretic segmentation, normalized
cuts, graph cut segmentation;

32
have an extended knowledge in object recognition and
categorization: histogram-based representations, distance
measures, Eigenfaces, Fisherfaces, sliding-window object detection;
have an extended knowledge in local feature extraction: Harris and
Hessian interest points, Laplacian scale selection, affine covariant
interest regions, SIFT descriptors;
have an extended knowledge in image matching and retrieval: visual
vocabularies, bag-of-words approaches, inverted file indexing,
vocabulary tree, homography verification;
have an extended knowledge in 3D reconstruction: epipolar
geometry, stereo reconstruction, structure-from motion;
have an extended knowledge in motion estimation: Lukas-Kanade
optical flowM
have an extended knowledge in tracking: Kalman filters, linear
dynamic models.
line and circle fitting;
have an extended knowledge in segmentation: segmentation by
clustering, k-Means, EM clustering, mean-shift clustering.
Abilities / Skills
Students
derive, explain, and apply the following practical computer vision algorithms:
Image processing: Thresholding, morphology operators, image derivatives, Canny
edge detection, Hough transform for line and circle detection
Mean-shift segmentation
Histogram-based object recognition, face recognition with Eigenfaces and
Fisherfaces, Viola-Jones face detection
Local feature extraction: Harris and Hessian interest point extraction, Laplacian scale
selection, homography estimation
3D reconstruction: Fundamental matrix estimation with the Eight-point algorithm, DLT
triangulation, RANSAC
Lucas-Kanade optical flow computation
Object tracking with Kalman filters
Competencies
Students
discuss the advantages and disadvantages of the covered computer
vision techniques:
find practical solutions to complex real-world computer vision
problems:
work on practical problems in a team.

33
Content
Computer Vision I
The goal of Computer Vision is to develop methods that enable a machine to analyze and "understand" the content of images and videos. This lecture teaches the fundamental Computer Vision techniques that underlie such capabilities. In addition, it shows current research developments and how they are applied to solve real-world tasks. The detailed lecture topics include
Image Processing Basics: The image formation process, binary image processing, linear filters, edge detection, structure extraction, radiometry, color
Image Segmentation: Segmentation as clustering, k-means, EM, mean-shift, segmentation as energy minimization, normalized cuts, graph cuts.
Object Recognition: Histogram based approaches, subspace representations
Local Invariant Features: Invariant feature extraction, local descriptors, efficient matching and indexing, recognition with local features
Object Categorization: Sliding-window approaches, Bag-of-visual-word approaches, part-based approaches
3D Reconstruction: Epipolar geometry, camera calibration, multi-view stereo, structure-from-motion
Motion & Tracking: Optical flow, tracking with linear dynamic models, Kalman filter
Media Presentation slides, scripts, exercises
Literature
D. Forsyth, J. Ponce, Computer Vision -- A Modern Approach, Prentice Hall, 2002.
R. Hartley, A. Zisserman. Multiple View Geometry in Computer Vision, 2nd Edition, Cambridge University Press, 2004.
K. Grauman, B. Leibe, Visual Object Recognition, Morgan & Kaufman publishers, 2011.
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination:Computer Vision I
6 0 0 90
Lecture: Computer Vision I
0 3 75 0
Exercise: Computer Vision I
0 1 45 0
Teaching Unit / Examinations: Examination COmputer Vision I
Title Examination Computer Vision I
Sub-title Exa CV I

34
Semester 2
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Computer Vision I
Title Lecture Computer Vision I
Sub-title L CV I
Semester 2
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Computer Vision I
Title Exercise Computer Vision I
Sub-title E CV I
Semester 2
Connection to the curriculum
Compulsory Module
35
Module: Robotic Sensor Systems
Module Robotic Sensor Systems
Module level Master
Subtitle RSS
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge Univ.-Prof. Dr.-Ing. Robert Schmitt
Lecturer Univ.-Prof. Dr.-Ing. Robert Schmitt
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
-none-
Learning objectives
Robotic Sensor Systems
Overall goal: The aim is to familiarize the students with the different sensor systems a robot can contain, how these sensor work and why the robot needs these sensors. It is distinguished between internal and external sensors. In addition, some basics about signal transmission and signal processing are introduced. Knowledge / Understanding
Students
know a large choice of internal and external sensors of a robot;
know work principles of all introduced kinds of sensor systems;
know the basics about signal processing and transmission,
containing the corresponding mathematical and physical principles.
Abilities / Skills
Students

36
calculate the signal from recording it with the sensor to processing
transmitting it;
explain how the sensor systems of a robot work and what they are
applied for.
Competencies
Students
know which sensor system is indispensable to give the robot special
skills and properties.
Content
Robotic Sensor Systems
Internal sensors (Position, speed, acceleration sensors, internal navigation systems)
External sensors (Tactile, proximitx, distance, position and visual sensors)
Basics about signal transmittance and processing
Special applications (space, Fukushima, under water)
Examples at IPT and WZL
Media L²P, PowerPoint-slides
Literature Lecture and exercise slides containing references
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Robotic Sensor Systems
5 0 0 120
Lecture: Robotic Sensor Systems
0 2 60 0
Exercise: Robotic Sensor Systems
0 2 60 0
Teaching Unit / Examinations: Examination Robotic Sensor Systems
Title Examination Robotic Sensor Systems
Sub-title Exa RSS
Semester 2

37
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Robotic Sensor Systems
Title Lecture Robotic Sensor Systems
Sub-title L RSS
Semester 2
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Robotic Sensor Systems
Title Exercise Robotic Sensor Systems
Sub-title E RSS
Semester 2
Connection to the curriculum
Compulsory Module
38
Elective Courses – Second Term
Module: Computer Vision II
Module Computer Vision II
Module level Master
Subtitle CV II
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge Univ.-Prof. Dr. sc. techn. Bastian Leibe
Lecturer Univ.-Prof. Dr. sc. techn. Bastian Leibe
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 60h
ECTS-Credit Points (CP)
6
Requirements according to examination regulation
Basic knowledge of linear algebra, Basic knowledge of probability theory and statistics.
Lecture Computer Vision, Lecture Machine Learning
Learning objectives
Computer Vision II
After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know the theoretical foundations underlying Computer Vision techniques in the areas of:
Motion estimation, Optical Flow
Background modeling
Single-object tracking
Dynamic models

39
Multi-object tracking
Articulated body estimation and articulated tracking
Abilities / Skills
Students
derive, explain and apply the following computer vision algorithms:
Motion estimation: Lukas-Kanade optical flow estimation Background modeling: Adaptive mixture-of-Gaussian models, Kernel models
Single-object tracking: Generalized Lukas-Kanade template tracking, mean-shift tracking, active contours, tracking by online classification, tracking by detection
Dynamic models: Kalman filters, Particle filters
Multi-object tracking: multi-hypothesis data association, Network flow optimization
Articulated body pose estimation: Gaussian Process pose estimation, model-based tracking, Active Appearance Models, Pictorial Structures
Competencies
Students
discuss the advantages and disadvantages of the covered computer
vision techniques;
find practical solutions to complex real-world computer vision
problems;
work on practical problems in a team.
Content
Computer Vision II
The lecture will cover advanced topics in computer vision. A particular focus will be on state-of-the-art techniques for object detection, tracking, and body pose estimation. The detailed lecture topics include
Motion estimation, Optical Flow
Background modeling
Single-object tracking
Dynamic models
Multi-object tracking
Articulated body estimation and articulated tracking
Media Presentation slides, scripts, exercises
Literature
Lecture script in form of printed slides Additional handouts for certain topics Web page with supplementary material and exercises:
http://www.vision.rwth-aachen.de/teaching Research papers and tutorials covering the state-of-the-art
algorithms will be made available to the students.
Lectures / Examinations

40
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Computer Vision II
6 0 0 90
Lecture: Computer Vision II
0 3 60 0
Exercise: Computer Vision II
0 1 60 0
Teaching Unit / Examinations: Examination Computer Vision II
Title Examination Computer Vision II
Sub-title Exa CV II
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Computer Vision II
Title Lecture Computer Vision II
Sub-title L CV II
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Computer Vision II
Title Exercise Computer Vision II
Sub-title E CV II
Semester 2
Connection to the curriculum
Elective Module

41
Module: Production Metrology
Module Production Metrology
Module level Master
Subtitle PM
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge Univ.-Prof. Dr.-Ing. Robert Schmitt
Lecturer Univ.-Prof. Dr.-Ing. Robert Schmitt
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h, Self-study 90sh
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
none
Learning objectives
Production Metrology
Overall goal: Students create the awareness, that “measuring” comprehends a lot more than plain data acquisition and metrology is a vital part of modern production processes. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know the function and the responsibility of metrology for production;
know the theoretical fundamentals which have to be taken into
consideration while the measuring process is planned, controlled,
analysed, are discussed;
know current measuring principles and devices in the field of
industrial production;

42
know statistical fundamentals being necessary for analysis of the
measured values.
Abilities / Skills
Students
define measuring task on the basis of given features;
select adequate measuring devices for measuring tasks;
interpret measuring results.
Competencies
Students
make their decision (having arguments) for using metrology within
production;
make decisions concerning measurement on the base of different
parameters.
Content
Production Metrology
Introduction Relevance of metrology for quality assurance and its integration in
production processes.
Metrological Basics Metrological concepts and definitions (Calibration, Uncertainty
etc.)
Tolerancing Form and positional tolerances, tolerancing principles and basics
Inspection Planning
Tasks and workflow of inspection planning, Procedure for creation of inspection plans
Shop floor measuring devices/ Measuring sensors
Commonly used manual inspection devices for the shop floor, Function and application of inductive, capacitive and pneumatical sensors
Optoelectronic inspection devices
Optical inspection systems for geometry testing and applications
Form and surface inspection devices Tactile and optical system for the characterisation of forms and
surfaces, surfaces parameters
Coordinate measurement technology Principles, types and applications of coordinate measuring
machines
Gauging inspection Form and positional gauging, Gauging Procedures
Statistical basics Statistical parameters for the description of production and measuring processes, tests on normal distribution

43
SPC, Process Capability
Statistical analysis and control of processes, Process capability indices
Inspection device management Tasks and procedures of inspection device management, Calculation of measuring device capability, Calibration chain
Media e-Learning L2P, Power Point
Literature Lecture script in form of printed slides
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Production Metrology
5 0 0 120
Lecture: Production Metrology
0 2 45 0
Exercise: Production Metrology
0 2 45 0
Teaching Unit / Examinations: Examination Production Metrology
Title Examination Production Metrology
Sub-title Exa PM
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Production Metrology
Title Lecture PM
Sub-title L PM
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Production Metrology
Title Exercise Production Metrology
Sub-title E PM
Semester 2

44
Connection to the curriculum
Elective Module

45
Module: Machine Dynamics of Rigid Systems
Module Machine Dynamics of Rigid Systems
Module level Master
Subtitle MDRS
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge apl. Prof. Dr.-Ing. Mathias Hüsing
Lecturer apl. Prof. Dr.-Ing. Mathias Hüsing
Language English
Assignment to the curriculum
Elective Module
Teaching form Written examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 60h
ECTS-Credit Points (CP)
6
Requirements according to examination regulation
none
Learning objectives
Machine Dynamics of Rigid Systems
Overall goal: Students gain the basic knowledge about machine dynamics and the fundamental means for mass balancing and power smoothing. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know the fundamental means for mass balancing and power
smoothing of single slider reciprocating machines and other general
mechanical systems;
know about the basic relations, resulting in fluctuating angular
velocities due to varying mass moments of inertia and varying loads
as reduced to a reference shaft. The relations can be derived and
explained.

46
Abilities / Skills
Students
explain and derive the mass forces and mass moments of single and
multi slider reciprocating machines.
Competencies
Students
derive the influencing factors for fluctuating speeds in single and
multi slider reciprocating machines can be described. Based on that
potential means for power smoothing;
develop the required kinematic and dynamic relations for the
machines and mechanisms under investigation;
Moreover, balancing of machines and mechanisms can be
performed with high mass forces, including design issues and
mathematical derivations;
develop practical and innovative instructions for mass balancing and
power smoothing from the dynamic analyses;
gain fundamental knowledge that can be applied to related industrial
challenges (including special machine construction and
specifications) in the field of design improvement by means of mass
balancing and power smoothing.
Content
Machine Dynamics of Rigid Systems
1 introduction / basic principles / planar kinematics and dynamics of rigid bodies
2 dynamic force analysis of planar mechanisms with rigid links: graphical technique / analytical approach
3 dynamic motion analysis of planar mechanisms with rigid links (neglecting friction)
4 kinematics and dynamics in single slider reciprocating machines: dynamically equivalent system of connecting rod / determination of frame torque
5 mass balancing for single slider reciprocating machines: determination / balancing of inertia forces & determination / balancing of inertial moments
6 mass balancing for multi slider reciprocating machines: determination (incl. graphical approach) / balancing of inertia forces & determination / balancing of inertial moments
7 introduction into power smoothing in mechanisms and slider reciprocating machines
8 equations of motion: external forces and moments / kinetic energy / potential energy

47
9 solution of equation of motion: general / for constant mass moment of inertia / for constant angular velocity / for specified instantaneous speed and acceleration / for constant energy
10 fluctuation of angular velocity / non uniformity factor
11 influence of flywheel on angular velocity & analytical / approximative calculation of flywheel
Media e-Learning L2P (Moodle), Power Point
Literature
Lecture Notes
Dresig, H.; Holzweißig, F.: Maschinendynamik / VDI-Richtlinie 2149: Getriebedynamik (Fachausschuss A204, Ltng. Prof. Dresig) Blatt 1: Starrkörper-Mechanismen / Dresig, H.: Schwingungen mechanischer Antriebssysteme / Gasch, R.; Nordemann, R.; Pfützner, H.: Rotordynamik / Pfeiffer, F.: Einführung in die Dynamik / Magnus, K.; Popp, K.: Schwingungen / Heimann, B.; Gerth, W.; Popp, K.: Mechatronik / Ulbrich, H: Maschinendynamik
Lectures / Examinations
Title
Workload (SWS / h)
Lecture h. (SWS)
Self-Study (h)
Examination: Machine Dynamics of Rigid Systems
6 0 0 120
Lecture: Machine Dynamics of Rigid Systems
0 2 60 0
Exercise: Machine Dynamics of Rigid Systems
0 2 60 0
Teaching Unit / Examinations: Examination Machine Dynamics of Rigid Systems
Title Examination Machine Dynamics of Rigid Systems
Sub-title Exa MDRS
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Machine Dynamics of Rigid Systems
Title Lecture Machine Dynamics of Rigid Systems
Sub-title L MDRS
Semester 2

48
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Machine Dynamics of Rigid Systems
Title Exercise Machine Dynamics of Rigid Systems
Sub-title E MDRS
Semester 2
Connection to the curriculum
Elective Module

49
Module: Industrial Logistics
Module Industrial Logistics
Module level Master
Subtitle IL
Lecture See list of lectures and examinations of the module
Semester allocation 2
Person in charge Univ.-Prof. Dr.-Ing. Dipl.-Wirt. Ing. Günther Schuh, apl. Prof. Dr.-Ing.
Volker Stich
Lecturer Univ.-Prof. Dr.-Ing. Dipl.-Wirt. Ing. Günther Schuh, apl. Prof. Dr.-Ing.
Volker Stich
Language English
Assignment to the
curriculum Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture Hours 45h, Self-study 105h
Lecture hours 45h
ECTS-Credit Points
(CP) 5
Requirements
according to
examination
regulation
none
Learning objectives
Industrial Logistics
After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know objectives and tasks of industrial logistics;
know main aspects of industrial logistics from organisational
involvement to logistics controlling;
understand the meaning and the effects of individual aspects of
industrial logistics.
Abilities / Skills
Students
place knowledge of industrial logistics in the overall context;
apply knowledge acquired to practical problems.
Content Industrial Logistics

50
• Objectives and tasks of logistics
• Organisational involvement of logistics
• Exercise: Prozess optimisation
• Material flow design
• Recitation by an external
• Information logistics
• Exercise: ''Beergame''
• Development and Procurement
• Exercise: Development and Procurement
• Material and finished goods disposition
• Exercise: Workshop on the Enhancement of Disposition Quality
• Distribution logistics
• Exercise: Opening proceedings for tour planning
• Spare part logistics
• Recitation by an external
• Logistics controlling
• Exercise: ABC, XYZ Analysis
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title ECTS
Workload (h) Duration
of Exam
(min) Lecture h.
(SWS) Self-Study (h)
Examination:
Industrial Logistics 5 0 0 120
Lecture:
Industrial Logistics 0 2 60 0
Exercise:
Industrial Logistics 0 1 45 0
Teaching Unit / Examinations: Examination Industrial Logistics
Title Examination Industrial Logistics
Sub-title Exa IL

51
Semester allocation 2
Connection to the
curriculum Elective Module
Teaching Unit / Examinations: Lecture Industrial Logistics
Title Lecture Industrial Logistics
Sub-title L IL
Semester allocation 2
Connection to the
curriculum Elective Module
Teaching Unit / Examinations: Exercise Industrial Logistics
Title Exercise Industrial Logistics
Sub-title E IL
Semester allocation 2
Connection to the
curriculum Elective Module

52
Module: Artificial Intelligence and Data Analytics for Engineers
Module Artificial Intelligence and Data Analytics for Engineers
Module level Master
Subtitle AIDAE
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge Prof. Dr.-Ing. Tobias Meisen
Lecturer Prof. Dr.-Ing. Tobias Meisen
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
none
Learning objectives
Artificial Intelligence and Data Analytics for Engineers
Overall goal: Students gain the application-specific knowledge about artificial intelligence (especially: machine learning as supervised, unsupervised and reinforcement learning) and data analytics (especially: data exploration, data mining, data visualization and interpretation of analysis results) for application in the engineering domain. After successfully completing this course, the students will have achieved the following learning outcomes:
Knowledge / Understanding
Students
obtain a comprehensive view of the challenges in the application and
usage of artificial intelligence and data analytics in the engineering
domain;
are familiar with fundamental concepts and methods of machine
learning and data mining in the engineering domain;

53
know and understand the different steps (cleansing, transformation
and extraction) necessary to analyse and to use data in various
engineering scenarios;
know about the application scope of specific methods and their
strength as well as their limits;
obtain a view on specific evaluation methods with regards to the
choice of analysis method and the underlying data;
are familiar with the intricacies of interpreting analysis results with
regards to the utilized analysis methods and evaluation method.
Abilities / Skills
Students
learn how to use and apply the methods and concepts in engineering
tasks correctly;
learn to distinguish between different analysis and learning scenarios
and how to approach engineering related challenges;
learn the basics of state of the art tools that are used for AI data
analytics in the engineering domain;
learn to choose the appropriate tools for the different steps of the
knowledge discovery and artificial learning process.
Competencies
Students
independently evaluate analysis scenarios in the engineering context
and select suitable methods accordingly;
find solutions for different analysis scenarios;
have practical and applicable knowledge about data analytics and
machine learning for engineering purposes;
use tools used in the machine learning and data analytics domain
and reflect the usage;
can combine single tools into a toolchain for an analysis pipeline to
address complex problems in the engineering domain.
Content
Artificial Intelligence and Data Analytics for Engineers
Introduction to Data Analytics and Artificial Intelligence in
Engineering: Goals, Challenges, Obstacles, and Processes
Data Preparation: Cleansing and Transformation
Data Integration: Architectures, Challenges, and Approaches
Data Representation: Feature Extraction and Selection
Data-Driven Learning: Supervised (Classification, Regression) and
Unsupervised Learning (Clustering) for Engineers
State-of-the-Art Methods: Reinforcement Learning and Deep Neural
Networks (GANs, CNNs, Restricted Boltzman Machines etc.)
Data Mining and Visual Analytics
Media e-Learning L2P, Power Point, Real-World-Applications and Data
Literature Lecture Notes; Students also receive a list of relevant literature

54
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Artificial Intelligence and Data Analytics for Engineers
5 0 0 90
Lecture: Artificial Intelligence and Data Analytics for Engineers
0 2 45 0
Exercise: Artificial Intelligence and Data Analytics for Engineers
0 2 45 0
Teaching Unit / Examinations: Examination Artificial Intelligence and Data Analytics for Engineers
Title Examination Artificial Intelligence and Data Analytics for Engineers
Sub-title Exa AIDA
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Artificial Intelligence and Data Analytics for Engineers
Title Lecture Artificial Intelligence and Data Analytics for Engineers
Sub-title L AIDA
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Artificial Intelligence and Data Analytics for Engineers
Title Exercise Data Analytics
Sub-title E AIDA
Semester 2
Connection to the curriculum
Elective Module
55
Module: Factory Planning
Module Factory Planning
Module level Master
Subtitle FaPl
Lecture See list of lectures and examinations of the module
Semester 2
Person in charge Univ.-Prof. Dr.-Ing. Achim Kampker
Lecturer Univ.-Prof. Dr.-Ing. Achim Kampker
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 4
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
-none-
Learning objectives
Factory Planning
Dear factory planer, design a factory which can produce watches today and cars tomorrow, that can produce different volumes each day, which is inflatable and transportable (Helmut Schulte).
The global competition, wide production programmes und frequent discontinuities lead to so far unknown challenges for the planning process of factories. Besides the classical resource, layout and logistic planning, also the definition of the own value adding scope, the choice and allocation of suitable production locations, the conception of production systems and the usage of suitable planning tools, are part of the process.
The lecture factory planning shows the state of the art of the particular topics, best-practice methods and approaches are explained and reference solutions presented. The theoretical content is deepened by an accompanying case-study and the presentation of actual industrial factory planning projects.
After successfully completing this course, the students will have acquired the following learning outcomes:

56
Knowledge / Understanding
Students
have an extended understanding of state of the art planning process
of factories;
know and understand the definition of the own value adding scope,
the choice and allocation of suitable production locations, the
conception of production systems and the usage of suitable planning
tools.
Abilities / Skills
Students
apply this knowledge to analyse organizational structures and forms
of production.
Competencies
Students
define and develop single production plants as well as production
networks of globalized companies and explain them to different
target groups
Content
Factory Planning
L1/L2 - Introduction
Comprehending the basic glossary, getting to know the content and understanding the challenges and requirements of modern factory planning.
L3/L4 - Dimensions of added value in Production / Evaluation methods for the planning process of value added
Getting to know different categories of value added in factory planning as well as strategic and economic methods for their evaluation
L5/L6 - Production site planning
This lecture focusses on current trends within the field of production site planning and presents methods for the assessment of production site alternatives and decision-making
L7/8 – Production Systems I: Process Planning and Resource Planning
Learning about challenges and approaches within the production process planning, understanding the problem of capacity planning in manufacturing and human resources
L9/10 - Production Systems II: Organization and Lean Production
Introduction to different organizational structures and forms of production, comprehending lean production with its basic elements and understanding the implementation of lean principles into production systems
L11/12 - Logistics planning

57
Comprehend the basics of logistics planning, getting to know the development of logistic strategies and principles from sourcing to recycling processes
L13/L14 - Layout and factory structure planning
Introduction to challenges and targets of layout and factory structure planning. Acquiring knowledge of design and assessment of factory layouts
Media e-Learning L2P, Power Point, group work
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Factory Planning
6 0 0 120
Lecture: Factory Planning
0 2 60 0
Exercise: Factory Planning
0 2 60 0
Teaching Unit / Examinations: Examination Factory Planning
Title Examination Factory Planning
Sub-title Exam FaPl
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Factory Planning
Title Lecture Factory Planning
Sub-title L FaPl
Semester 2/4
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Factory Planning
Title Exercise Factory Planning

58
Sub-title E FaPl
Semester 2
Connection to the curriculum
Elective Module
59
Module: Summer School – Advanced Topics in Robotic Systems
Engineering
Module Summer School – Advanced Topics in Robotic Systems Engineering
Module level Master
Subtitle SuS
Lecture See list of lectures and examinations of the module
Semester 2
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
ECTS-Credit Points (CP)
3
Requirements according to examination regulation
none
Content Students can choose a Summer School worth up to 3 CP
Media -
Literature -
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Summer School
3 0 0 60
Lecture: Summer School
0 2 60 0
Exercise: Summer School
0 2 60 0
Teaching Unit / Examinations: Examination Summer School
Title Examination Summer School – Advanced Topics in Robotic Systems Engineering
Sub-title Exa SuS

60
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Summer School
Title Lecture Summer School – Advanced Topics in Robotic Systems Engineering
Sub-title L SuS
Semester 2
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Summer School
Title Exercise Summer School – Advanced Topics in Robotic Systems Engineering
Sub-title E SuS
Semester 2
Connection to the curriculum
Elective Module

61
Compulsory Course – Third Term
Module: Simulation of Robotic Systems, Sensors and Environment
Module Simulation of Robotic Systems, Sensors and Environment
Module level Master
Subtitle SRSE
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Dr.-Ing. Jürgen Roßmann
Lecturer Univ.-Prof. Dr.-Ing. Jürgen Roßmann
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 45h, Self-study 105h
Lecture hours 45h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
none
Learning objectives
Simulation of Robotic Systems, Sensors and Environment
Overall goal: Students gain the basic knowledge concerning methods and processes to simulate robotic systems in their operational environment and to use such simulations throughout the life-cycle of the robot. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
understand why simulation of robotic systems is important for robot
engineering and operation;
understand the Digital Twin concept and its relationship to
engineering and real-world operation;
62
are familiar with the most important simulation methods used for the
simulation of robots, their sensors and actuators as well as their
dynamic environment;
know how to use these methods in different usage scenarios.
Abilities / Skills
Students
use simulation technology to realize Digital Twins of robot
manipulators, mobile robots, working machines etc. in different
application areas (factory, space, construction, forestry);
analyse and understand the simulation results.
Competencies
Students
select and combine appropriate simulation methods for Digital Twins
in different usage scenarios;
use and integrate Digital Twins in engineering processes and robot
operation;
understand and present the simulation results.
Content
Simulation of Robotic Systems, Sensors and Environment
General introduction: Simulation is the “representation of a system with its dynamic processes in an experimentable model to reach findings which are transferable to reality.” State-of-the-art simulation technology makes this possible even for complex networks of interacting Digital Twins. This makes simulation indispensable both for the development and operation of automation systems.
Terminology and basic concepts: (Technical) asset, system, model, simulation, simulator, verification, validation, calibration, adjustment
Requirements for simulation technology
The Digital Twin concept
Simulation and Industry 4.0
The Virtual Testbed concept
Use of simulation in engineering processes in different application areas
Multi-disciplinary simulation for multi-disciplinary systems
Classification and comparison of simulation methods
Domain-independent simulation methods, e.g. equation-based simulation, signal-oriented simulation, object-oriented simulation, discrete-event simulation, agent-based simulation
Domain-specific simulation methods for robotics, e.g. Kinematics (orientation, pose, transformation, kinematic chains and trees, forward and inverse kinematics), equations of motion (Newton Euler, Lagrange), rigid body dynamics, sensor simulation

63
Coupling of simulation models and simulators
Simulation and the sense-think-act cycle
Simulation and model-based systems engineering
Digital Factory
Virtual Commissioning
Integration of simulation technology in engineering processes
Data management and data formats
Semantic world modelling
Simulation and optimization
Simulation and man-machine-interaction
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Simulation of Robotic Systems, Sensors and Environment
5 0 0 30 (oral), 60-120 (written)
Lecture: Simulation of Robotic Systems, Sensors and Environment
0 2 45 0
Exercise: Simulation of Robotic Systems, Sensors and Environment
0 1 60 0
Teaching Unit / Examinations: Examination Simulation of Robotic Systems, Sensors and Environment
Title Examination Simulation of Robotic Systems, Sensors and Environment
Sub-title Exa SRSE
Semester 3
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Lecture Simulation of Robotic Systems, Sensors and Environment

64
Title Lecture Simulation of Robotic Systems, Sensors and Environment
Sub-title L SRSE
Semester 3
Connection to the curriculum
Compulsory Module
Teaching Unit / Examinations: Exercise Simulation of Robotic Systems, Sensors and Environment
Title Exercise Simulation of Robotic Systems, Sensors and Environment
Sub-title E SRSE
Semester 3
Connection to the curriculum
Compulsory Module

65
Elective Courses – Third Term
Module: Introduction to Artificial Intelligence
Module Introduction to Artificial Intelligence
Module level Master
Subtitle IAI
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Gerhard Lakemeyer, Ph. D.
Lecturer Univ.-Prof. Gerhard Lakemeyer, Ph. D.
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 60h
ECTS-Credit Points (CP)
6
Requirements according to examination regulation
Basic knowledge of computer science
Learning objectives
Introduction to Artificial Intelligence
Overall goal: The aim is to familiarize the student with basic concepts and methods of Artificial Intelligence and to enable the student to apply them in practice. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
are familiar with the methods underlying the design of intelligent
agents, including search methods, knowledge representation using
first-order logic, planning, reasoning under uncertainty, and inductive
learning.
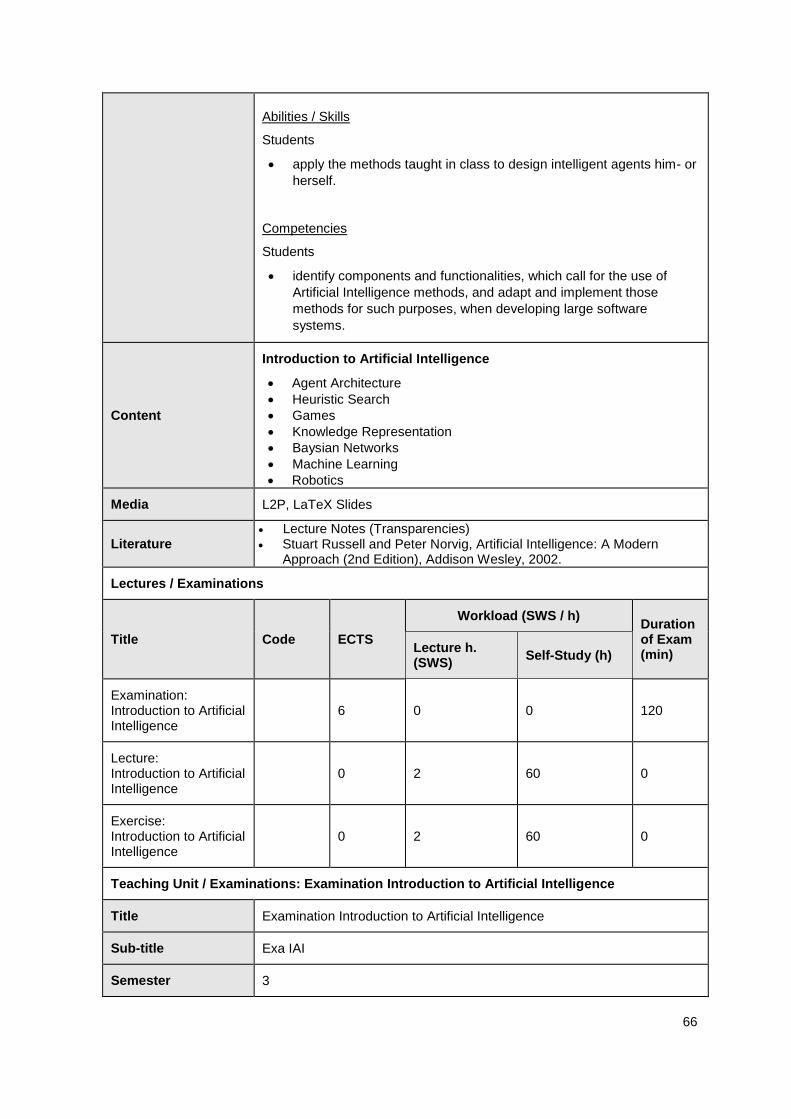
66
Abilities / Skills
Students
apply the methods taught in class to design intelligent agents him- or
herself.
Competencies
Students
identify components and functionalities, which call for the use of
Artificial Intelligence methods, and adapt and implement those
methods for such purposes, when developing large software
systems.
Content
Introduction to Artificial Intelligence
Agent Architecture
Heuristic Search
Games
Knowledge Representation
Baysian Networks
Machine Learning
Robotics
Media L2P, LaTeX Slides
Literature Lecture Notes (Transparencies) Stuart Russell and Peter Norvig, Artificial Intelligence: A Modern
Approach (2nd Edition), Addison Wesley, 2002.
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Introduction to Artificial Intelligence
6 0 0 120
Lecture: Introduction to Artificial Intelligence
0 2 60 0
Exercise: Introduction to Artificial Intelligence
0 2 60 0
Teaching Unit / Examinations: Examination Introduction to Artificial Intelligence
Title Examination Introduction to Artificial Intelligence
Sub-title Exa IAI
Semester 3

67
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Introduction to Artificial Intelligence
Title Lecture Introduction to Artificial Intelligence
Sub-title L IAI
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Introduction to Artificial Intelligence
Title Exercise Introduction to Artificial Intelligence
Sub-title E IAI
Semester 3
Connection to the curriculum
Elective Module

68
Module: Advanced Machine Learning
Module Advanced Machine Learning
Module level Master
Subtitle AML
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Dr. sc. techn. Bastian Leibe
Lecturer Univ.-Prof. Dr. sc. techn. Bastian Leibe
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120sh
Lecture hours 60
ECTS-Credit Points (CP)
6
Requirements according to examination regulation
It is advised to have knowledge in Linear algebra and probability theory and statistics
Learning objectives
Advanced Machine Learning
On successful completion of this module, students should be able to recall and explain the theoretical foundations and concepts underlying Machine Learning techniques, in particular:
Knowledge / Understanding
Students
know and understand the following topics:
Linear regression
Regularization
Support Vector Regression
Gaussian Processes
Bayesian Estimation
Probability Distributions (Gaussian, Bernoulli, Multinomial, Dirichlet, Beta), Conjugate Priors
Approximate inference: sampling techniques, MCMC
Mixture Models
Latent Factor Models (PCA, Factor Analysis, ICA)

69
Latent Dirichlet Allocation
Bayesian Non-Parametric Methods (Dirichlet Processes, Chinese Restaurant Process, Beta Processes, Indian Buffet Process)
Support Vector Machines
Structured Output Learning
Abilities / Skills
Students
derive, explain and apply the following practical machine learning methods and algorithms:
Linear regression: Least-squares regression, Ridge regression Probability density estimation: Maximum Likelihood, Maximum-A-
Posteriori, Bayesian estimation, EM algorithm for Mixture-of-Gaussians estimation
Gaussian Processes for regression Support Vector Regression Gibbs Sampling, MCMC Latent Dirichlet Allocation Dirichlet Processes Beta Processes Support Vector Machines Structured Output Regression
Competencies
Students
discuss the advantages and disadvantages of the covered machine
learning techniques
find practical solutions to complex real-world machine learning
problems
work on practical problems in a team
Content
Advanced Machine Learning
This lecture will extend the scope of the "Machine Learning" lecture with additional and, in parts, more advanced concepts. In particular, the lecture will cover the following areas:
Regression techniques (linear regression, ridge regression, support vector regression) Gaussian Processes
Bayesian Estimation Bayesian Nonparametric methods (Dirichlet Processes, Beta
Processes) Structured Output Learning
Media Lecture script in form of printed slides, Additional handouts for certain topics, Web page with supplementary material and exercises: http://www.mmp.rwth-aachen.de/teaching
Literature
C.M. Bishop, Pattern Recognition and Machine Learning, Springer, 2006
T. Hastie, R. Tibshirani, J. Friedman, The Elements of Statistical Learning, 2nd Edition, Springer, 2009
C.E. Rasmussen, C.K.I. Williams, Gaussian Processes for Machine Learning, MIT Press, 2006

70
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Advanced Machine Learning
6 0 0 90
Lecture: Advanced Machine Learning
0 3 75 0
Exercise: Advanced Machine Learning
0 1 45 0
Teaching Unit / Examinations: Examination Advanced Machine Learning
Title Examination Advanced Machine Learning
Sub-title Exa AML
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Advanced Machine Learning
Title Lecture Advanced Machine Learning
Sub-title L AML
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Advanced Machine Learning
Title Exercise Advanced Machine Learning
Sub-title E AML
Semester 3
Connection to the curriculum
Elective odule

71
Module: Power Electronics
Module Power Electronics
Module level Master
Subtitle PE-CSA
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Rik W. De Doncker
Lecturer Lecture: Rik W. De Doncker
Exercise: Research Associates
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
The basic knowledge of power electronics, as they are taught in Power Electronics – Fundamentals, Topologies and Analysis, are expected.
Learning objectives
Power Electronics
Overall goal: Introduction and understanding of control, synthesis and applications of modern power electronic systems. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
understand of basic topologies for power electronic applications.
Abilities / Skills
Students
analyze the dynamic behavior of components and circuits, the control
concepts, parasitic effects and electromagnetic compatibility.

72
design an appropriate power electronic solution for each application
including hardware and control.
Competencies
Students
evaluate independently existing power electronic solutions and to
optimize them with regard to the application, e.g. for best efficiency.
Content
Power Electronics
Power Electronics generally have the goal to perform electrical energy conversion at high efficiency. The course focuses on the following aspects of converter design:
Minimum converter losses silicon and magnetics losses thermal design Soft switching of silicon devices to improve device ratings Using snubbers Soft-switching converter topologies Transformers in power electronics, using uni- and bidirectional core
excitation AC-AC converters Control of voltage source converters High-power electronics Examples
Media Presentation slides, scripts, exercises
Literature Mohan, Undeland, Robins, Power Electronics, John Wiley and Sons
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Power Electronics 5 0 0 90
Lecture: Power Electronics
0 3 60 0
Exercise: Power Electronics
0 1 30 0
Teaching Unit / Examinations: Examination Power Electronics
Title Examination Power Electronics
Sub-title Exa PE
Semester 3

73
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Power Electronics
Title Lecture Power Electronics
Sub-title L PE
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Power Electronics
Title Exercise Power Electronics
Sub-title E PE
Semester 3
Connection to the curriculum
Elective Module

74
Module: Processes and Principles of Lightweight Design
Module Processes and Principles of Lightweight Design
Modul level Master
Code PPLD
Lecture See list of lectures and examinations of the module
Semester 3
Person in Charge Univ.-Prof. Dr.-Ing. Kai-Uwe Schröder,
Lecturer Univ.-Prof. Dr.-Ing. Kai-Uwe Schröder,
Language English
Assignment to the curriculum Elective module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 60h
ECTS-Credit Points (CP) 6
Requierments according to examination regulation
-none-
Learning Objectives
Processes and Principles of Lightweight Design
After successfully completing this course, the student will have acquired
the following learning outcomes:
Knowledge and Understanding:
Students
have a broad understanding of product development processes and
can structurally andindependently work on new technical tasks using
design methodology;know how to systematically analyze, evaluate
and combine partial solutions.
Abilities / Skills:
Students

75
apply basic rules and principles of Embodiment Design in order to
create optimal products for the relevant requirements, in particular
structural demands;
realize special aspects of thin-walled lightweight structures and to
design them properly;
analyze technical problems and tasks, identify existent restrictions
and hence properly elaborate technical specifications.
Competencies:
Students
know methods to design and dimension structures and are able to
explain them
check the correctness of results of numerical simulation software
Content
Processes and Principles of Lightweight Design
Introduction to design methodology and lightweight design Technical tasks: Purposes of technical systems; Methods to derive
requirements and setting up requirements lists Development of technical concepts/Conceptualization: Function
structures; Discursive, heuristic and empiric methods for problem solving
Concept evaluation: Methods to evaluate and select among variants Rules of Embodiment Design: Simple, clear and safe Principles of Embodiment Design: Principles of force transmission,
principle of the division of tasks, principle of self-help, principle of stability and bi-stability, principle of fault free design Design for X: Allow for expansion, allow for creep and relaxation, ease of assembly
Idealization of structures: Beam theory (cutting forces, deflection line, shear stresses); Composite beams
Shear flow in thin-walled closed cross sections: Location of shear center; Shear flexible beams; Torsion of thin-walled cross sections
Shear web theory: Stiffened shear web with rigid end cross sections; 2-D and 3- D stiffened shear webs
Deformation of elastic structures: Principle of virtual work; Maxwell-Mohr; Deformation of stiffened shear webs
Statically indeterminate structures: Calculation of stresses in lap joints; Load introduction problems - Stability problems in slender and thin-walled structures: Fundamentals of beam, plate and shell buckling (Influence of plasticity and imperfections); Buckling of plates; Buckling of shells (stiffened and unstiffened)
Media e-Learning L2P, Power Point
Literature Lecture Notes, Students also receive a list of relevant literature
Lectures / Examinations
Title
Code
ECTS
Workload Duration
of Exam )
Lecture H. (SWS)
Self-Study
Examination : Processes and
6 0 0 120

76
Principles of Lightweight Design
Lecture : Processes and Principles of Lightweight Design
0 2 60 0
Exercise (Übung): Processes and Principles of Lightweight Design
0 2 60 0
Teaching Unit / Examinations: Examination Processes and Principles of Lightweight Design
Title Examination Processes and Principles of Lightweight Design
Sub-title Exa PPLD
Semester 3
Connection to the curriculum Elective Module
Teaching Unit / Examinations: Lecture Processes and Principles of Lightweight Design
Title Lecture: Processes and Principles of Lightweight Design
Sub-title L PPLD
Semester 3
Connection to the curriculum Elective Module
Teaching Unit / Examinations: Exercise Processes and Principles of Lightweight Design
Title Exercise: Prüfung Fundamentals of Lightweight Design
Sub-title E PPLD
Semester 3
Connection to the curriculum Elective Module

77
Module: Applied Numerical Optimization Engineering
Module Applied Numerical Optimization Engineering
Module level Master
Subtitle ANOE
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Alexander Mitsos, Ph.D.
Lecturer Univ.-Prof. Alexander Mitsos, Ph.D.
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 120h, Lecture hours 60h, Self-study 60h
Lecture hours 60h
ECTS-Credit Points (CP)
4
Requirements according to examination regulation
none
Learning objectives
Applied Numerical Optimization Engineering
Overall goal: In mechanical and chemical engineering numerical optimization methods are becoming more and more accepted. In the near future numerical optimization will be one of the standard tools of any engineer. In this lecture, the students learn to apply the basic techniques of mathematical optimization on applications from mechanical and chemical engineering. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
understand the statement of mathematical optimization problems
with objective functional, model and constraints as a basis to solve
arbitrary problems;
know which numerical solution method is to be used for the solution
of such problems;

78
understand the classification of the optimization problems and is able
to allocate arbitrary problems to the corresponding class;
understand the need for the numerical solution for arbitrary
mathematical optimization problems and are able to implement the
basic numerical concepts in their own algorithms.
Abilities / Skills
Students
master the derivation of the optimality conditions for constrained and
unconstrained problems with non-linear constraints.
Competencies
Students
will be enabled to analyse the problem statement and to produce the
concrete solution of the problem by means of the home-works
(method competence).
Content
Applied Numerical Optimization Engineering
Definition: Mathematical Optimization
Problem formulation: objective functional, model und constraints
Examples of Optimization Problems
Classification of Optimization Problems
Mathematical basics 1: continuity, differentiability
Mathematical basics 2: gradient, Hesse matrix, convexity
Optimality conditions for unconstrained problems
Solution concepts for unconstrained problems, direct, indirect numerical solution, principle of line search and trust region
Line search strategies: Armijo and Wolfe conditions
Methods for the Determination of the descent direction: Steepest Descent, Conjugate Gradients
Methods for the determination of a descent direction: Newton method
Practical Newton methods: Inexact, Modified and Quasi-Newton method
Trust Region methods: the Dogleg method
Regression problems: method of Least-Squares
Gauss-Newton solution method for regression problems
Levenberg-Marquardt solution method for regression problems
Example of an optimization problem: Ethanol extraction
Derivation of the KKT optimality conditions
Linear programming (LP)
Interior point methods for LPs

79
Simplex method for LPs
Quadratic programming (QP)
Solving the KKT system for QPs
Active-Set methods for QPs
Solution strategies for non-convex QPs
Gradient-Projection method for QPs
Interior-Point methods for QPs
Solution of general nonlinear problems (NLP)
Penalty Methods for NLPs
Log-Barrier method for NLPs
Augmented Lagrangian method for NLPs
SQP methods: Line Search SQP
Examples for optimization problems: Layer Crystalliser, Distillation Column
Introduction to mixed-integer optimization:
Branch and Bound
Outer-Approximation
Introduction to Dynamic Optimization:
Optimality conditions
Simultaneous solution methods: full discretisation
Continuous problem formulation: adjunct equations / Hamilton form
Dynamic Optimization: Sequential Solution Method
Derivation of the sensitivity equation
Examples for dynamic optimization problems
Short introduction to State Estimation
Optimization under Uncertainty
Two-Stage Stochastic Programming
Introduction to Semi-Infinite Programming (SIP)
Solution Approaches for SIP
Media e-Learning L2P, Power Point
Literature
Lecture Notes
Nocedal & Wright (2006), Numerical Optimization
Students also receive a list of further relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
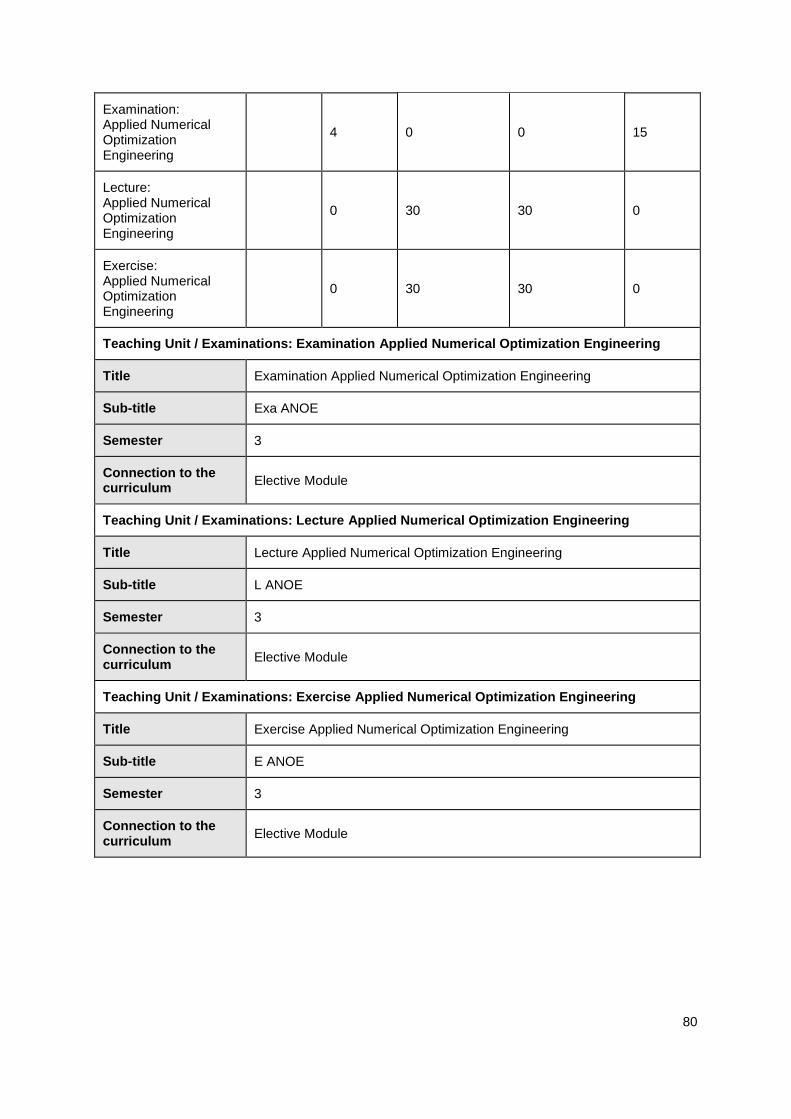
80
Examination: Applied Numerical Optimization Engineering
4 0 0 15
Lecture: Applied Numerical Optimization Engineering
0 30 30 0
Exercise: Applied Numerical Optimization Engineering
0 30 30 0
Teaching Unit / Examinations: Examination Applied Numerical Optimization Engineering
Title Examination Applied Numerical Optimization Engineering
Sub-title Exa ANOE
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Applied Numerical Optimization Engineering
Title Lecture Applied Numerical Optimization Engineering
Sub-title L ANOE
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Applied Numerical Optimization Engineering
Title Exercise Applied Numerical Optimization Engineering
Sub-title E ANOE
Semester 3
Connection to the curriculum
Elective Module

81
Module: Numerical Methods in Mechanical Engineering
Module Numerical Methods in Mechanical Engineering
Module level Master
Subtitle NMME
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Dr.-Ing. Bernd Markert
Lecturer Univ.-Prof. Dr.-Ing. Bernd Markert
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 210h, Lecture hours 75h, Self-study 135h
Lecture hours 5
ECTS-Credit Points (CP)
7
Requirements according to examination regulation
Mandatory: none
Recommended: vector calculus, differential calculus, integral calculus
Learning objectives
Numerical Methods in Mechanical Engineering
Overall goal: Students gain the basic knowledge about the numerical methods commonly used in mechanical engineering.
After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know he theoretical foundations of current numerical methods in
engineering;
know how to bridge between the physical formulation of a problem
and a mathematical formulation suited to numerical approximation
methods;
understand the individual steps and specific transformations required
for the construction of an approximate numerical solution.
Abilities / Skills

82
Students
apply approximation techniques and analyse the results obtained by
various approximation methods;
use their acquired knowledge to develop new approximation
methods;
critically judge the consistency and correctness of numerical
methods;
apply variational methods to obtain equivalent formulations of a
problem of differential equations.
Competencies
Students
construct basis functions compatible with the boundary conditions;
construct and apply a variety of approximation methods based on the
WRM (collocation by points, collocation by subdomains, Galerkin's
method, least squares method, Ritz method);
solve constrained optimization problems by using the Lagrange
Multipliers Method;
construct the associated energy potential and to apply the
stationarity principle for a conservative mechanical problem;
apply tools of numerical integration.
Content
Numerical Methods in Mechanical Engineering
From intuitional perception to the mathematical formulation of engineering problems; examples. Choice of assumptions and mathematical tools to formulate problems
Classes of solution methods (overview): Analytical solutions, approximate solutions, direct approximation, approximate solution after transformation of the problem
Classes of physical problems: discrete systems, continuous systems. Equilibrium, eigenvalue, and propagation problems
Integral forms. Weak formulation of problems. The Method of Weighted Residuals (WRM)
Introduction to variational calculus. Functionals
Functionals associated with an integral form
The stationarity principle. Stationarity conditions. Examples from mechanics
The method of Lagrange multipliers. Mixed and complementary formulations
Catalogue of functionals used in continuum mechanics and their specific features
Discretisation of integral forms. Collocation by points. Collocation by subdomains
Galerkin’s method. Least Squares Method. Examples
Ritz' method. Examples
Numerical integration. Newton-Cotes method. Gauss method. Examples

83
The Finite Element Method. Shape functions, construction of finite elements
Matrix representation in the FEM. Stiffness matrix. Boundary conditions
Examples from structural engineering. Software packages in engineering
Media e-Learning L²P, computer lab
Literature Lecture Notes (online)
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Numerical Methods in Mechanical Engineering
7 0 0 120
Lecture: Numerical Methods in Mechanical Engineering
0 3 105 0
Exercise: Numerical Methods in Mechanical Engineering
0 2 30 0
Teaching Unit / Examinations: Examination Numerical Methods in Mechanical Engineering
Title Examination Numerical Methods in Mechanical Engineering
Sub-title Exa NMME
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Numerical Methods in Mechanical Engineering
Title Lecture Numerical Methods in Mechanical Engineering
Sub-title L NMME
Semester 3
Connection to the curriculum
Elective Module
84
Teaching Unit / Examinations: Exercise Numerical Methods in Mechanical Engineering
Title Exercise Numerical Methods in Mechanical Engineering
Sub-title E NMME
Semester 3
Connection to the curriculum
Elective Module

85
Module: Strategic Technology Management
Module Strategic Technology Management
Module level Master
Subtitle STM
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Torsten-Oliver Salge, Ph. D.
Lecturer Univ.-Prof. Torsten-Oliver Salge, Ph. D.
Language English
Assignment to the curriculum
Elective Module
Teaching form
The course grade will be determined based on one of the following modes of
evaluation:
(a) Colloquium and presentation (50%) and written exam (50%,
duration: 60 minutes); or
(b) Colloquium and presenation (50%) and written (individual) term
paper (50%);
or
(c) Written exam (100%, duration: 60 minutes)
The final mode of evaluation (A, B, or C) will be announced and publicly displayed prior to the first class session. In general, grading for this class will be based on mode (a).
Workload Total 150h, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
-none-
Learning objectives
Strategic Technology Management
Overall goal: Students gain theoretical and practical knowledge in technology
and innovation management as preparation for interdisciplinary leadership
roles in research and development (R&D) and beyond.
After successfully completing this course, the student will have acquired the
following learning outcomes:
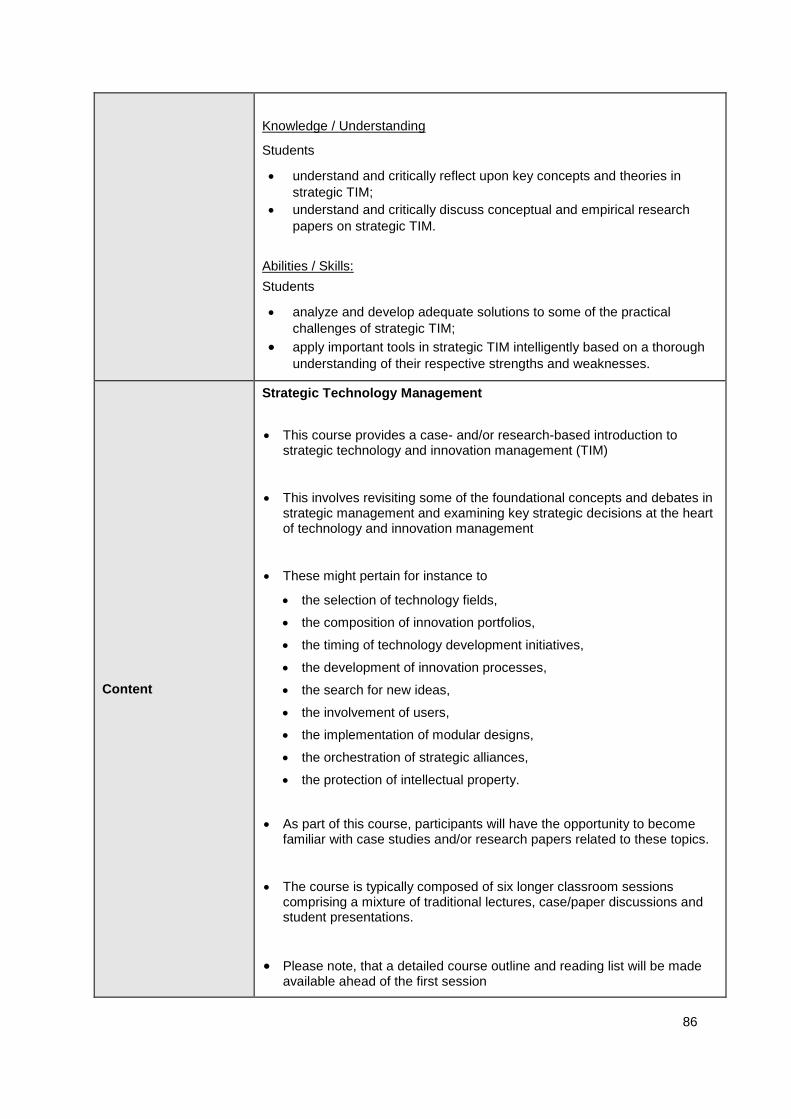
86
Knowledge / Understanding
Students
understand and critically reflect upon key concepts and theories in
strategic TIM;
understand and critically discuss conceptual and empirical research
papers on strategic TIM.
Abilities / Skills:
Students
analyze and develop adequate solutions to some of the practical
challenges of strategic TIM;
apply important tools in strategic TIM intelligently based on a thorough
understanding of their respective strengths and weaknesses.
Content
Strategic Technology Management
This course provides a case- and/or research-based introduction to strategic technology and innovation management (TIM)
This involves revisiting some of the foundational concepts and debates in strategic management and examining key strategic decisions at the heart of technology and innovation management
These might pertain for instance to
the selection of technology fields,
the composition of innovation portfolios,
the timing of technology development initiatives,
the development of innovation processes,
the search for new ideas,
the involvement of users,
the implementation of modular designs,
the orchestration of strategic alliances,
the protection of intellectual property.
As part of this course, participants will have the opportunity to become familiar with case studies and/or research papers related to these topics.
The course is typically composed of six longer classroom sessions comprising a mixture of traditional lectures, case/paper discussions and student presentations.
Please note, that a detailed course outline and reading list will be made available ahead of the first session

87
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h)
Duration of Exam (min) Lecture h.
(SWS) Self-Study (h)
Examination: Strategic Technology Management
5 0 0 See examination options
Lecture: Strategic Technology Management
0 2 45 0
Exercise: Strategic Technology Management
0 2 45 0
Teaching Unit / Examinations: Examination Strategic Technology Management
Title Examination Strategic Technology Management
Sub-title Exa STM
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Strategic Technology Management
Title Lecture Strategic Technology Management
Sub-title L STM
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Strategic Technology Management
Title Exercise Strategic Technology Management
Sub-title E STM
Semester 3
Connection to the curriculum
Elective Module

88

89
Module: Finite Element Methods for Engineers
Module Finite Element Methods for Engineers
Module level Master
Subtitle FEM
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Dr.-Ing. Mikhail Itskov
Lecturer Univ.-Prof. Dr.-Ing. Mikhail Itskov
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 150h, Lecture hours 60h, Self-study 90h
Lecture hours 60h
ECTS-Credit Points (CP)
5
Requirements according to examination regulation
none
Learning objectives
Finite Element Methods for Engineers
Overall goal: Students gain the basic knowledge about finite element methods and their application to solid and structural mechanics. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
understand why the FE-Method and the other numerical methods
behind are important for engineering practice;
are familiar with the fundamental concepts of variation calculus;
know the basic concept of FEM.
Abilities / Skills
Students

90
use the finite element method for plane strain, plane stress and torsion problems.
Competencies
Students
find solutions for truss systems under various boundary conditions;
find solutions for mechanical problems by using weighted residual
methods.
Content
Finite Element Methods for Engineers
General introduction, concept of the finite element method
Symbolic assembly procedure
Assembly procedure
Global and local coordinates
Stiffness matrix for trusses / coordinate
transformation
Variation techniques
Solution of truss structures.
Variation techniques, Euler-Lagrange equation
Natural and forced boundary conditions
Multiple integrals, Gauss-Theorem
Variations of elementary algebraic functions
Variation principle for linear self-ad joint diff. operators
Solution of some classical variation problems
Principle of virtual work as a weak form of the momentum balance, variation principles of mechanics (Lagrange, Hu-Washizu)
Differential equation of a linear elastic bar, analytic solution for various load cases
Rayleigh-Ritz method, weighted residual approximations,
Point or subdomain collocation
Galerkin method, least-squares method, linear elastic bar approximated by a continuous shape function
Displacement formulation
Three-field (mixed) formulation
Examples to weighted residual approximations
Requirements to shape functions
Continuous shape functions, piecewise defined
shape functions, approximation by piecewise defined
Shape functions.

91
Two-dimensional problems of elasticity, triangular element, plain strain and plane stress problems
Torsion of a prismatical bar
Examples for plain strain and plane stress problems discretized by linear triangular elements
Axisymmetric stress analysis, 3-D stress analysis
Repetitorium
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Finite Element Methods for Engineers
5 0 0 120
Lecture: Finite Element Methods for Engineers
0 2 45 0
Exercise: Finite Element Methods for Engineers
0 2 45 0
Teaching Unit / Examinations: Examination Finite Element Methods for Engineers
Title Examination Finite Element Methods for Engineers
Sub-title Exam FEM
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Finite Element Methods for Engineers
Title Lecture Finite Element Methods for Engineers
Sub-title L FEM
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Finite Element Methods for Engineers
Title Exercise Finite Element Methods for Engineers

92
Sub-title E FEM
Semester 3
Connection to the curriculum
Elective Module

93
Module: Mechatronics and Control Techniques for Production Plants
Module Mechatronics and Control Techniques for Production Plants
Module level Master
Subtitle MCTPP
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Univ.-Prof. Dr.-Ing. Christian Brecher
Lecturer Univ.-Prof. Dr.-Ing. Christian Brecher
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 180h, Lecture hours 60h, Self-study 120h
Lecture hours 60h
ECTS-Credit Points (CP)
6
Requirements according to examination regulation
none
Learning objectives
Mechatronics and Control Techniques for Production Plants
Overall goal: After this course, the students are able to understand the structure of mechatronic systems in the area of application of the means of production in its complexity and its context and overarching concepts of machine control systems to classify. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know the construction and design of mechatronic systems for
production equipment;
know the characteristics of logical and mechanical numerical motion
controls of machines;
know special features of the behaviour and the modelling of
mechatronic components, especially for measuring and gripping
technology;

94
know concepts of machine control in various development systems,
as well as machine and process monitoring;
know fields of application, possibilities of an industrial engineering
system and the design.
Abilities / Skills
Students
explain application areas and display the characteristics of motion
controls required in machine and process monitoring. In addition, you
can theoretically explain the design of an application-oriented
problem and apply it to application-relevant questions.
Competencies
Students
analyze theory-based mechatronic systems for production systems
and industrial monitoring solutions and to evaluate their quality in the
industrial environment. With this competence, they are able to use
their own creative ideas and within the framework of the concepts
known to you to develop solutions and to establish the set-up of
concepts;
create control programs in various development systems and
evaluate their quality.
Content
Mechatronics and Control Techniques for Production Plants
• Introduction of Mechatronics and Control Techniques for Production Plants
• Mechanical controls
- Machine elements of mechanical controls
- Application examples for mechanical controls
• Information processing in mechatronic systems
- Theory and examples of embedded systems
- Programming of embedded systems and logical controls
• Programmable Logic Control (PLC) and Motion Control (MC)
- Programming of programmable logic controllers
- Test methods of programmable logic controllers (HIL)
• Numerical Control 1: Design, programming, CAM
- NC programming procedures (manual and workshop-oriented)
- NC programming of CAM systems
• Numerical Control 2: Interpolation
- Structure of an NC control
- Tool offset, kinematic transformation and compensations, speed control and Interpolation
• Position control of feed drives

95
- Control concept of a machine axis
- Accuracy and synchronous control of multi-axis systems
• Measurement Systems and Sensors
- Measured variables in production systems
- Position, current acceleration, force, torque, temperature and angle measuring systems
• Signal processing, process and condition monitoring
- Tasks of the process and condition monitoring
- Use of sensors and processing of sensor signals
• Robots and handling systems, Robot Control (RC)
- Areas of application
- Construction and kinematics
• Gripper technology
- Gripping principles
• Mechatronic and system-oriented engineering
- Design and simulation software (drive design and behavior modeling)
- Virtual Commissioning
Media L2P
Literature For the english lecture and exercise a set of slides with english comments can be found in the L²P of the lecture.
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Mechatronics and Control Techniques for Production Plants
6 0 0 120
Lecture: Finite Element Methods for Engineers
0 2 60 0
Exercise: Mechatronics and Control Techniques for Production Plants
0 2 60 0
Teaching Unit / Examinations: Examination Mechatronics and Control Techniques for Production Plants
Title Examination Mechatronics and Control Techniques for Production Plants
96
Sub-title Exa MCTPP
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Mechatronics and Control Techniques for Production Plants
Title Lecture Mechatronics and Control Techniques for Production Plants
Sub-title L MCTPP
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Mechatronics and Control Techniques for Production Plants
Title Exercise Mechatronics and Control Techniques for Production Plants
Sub-title E MCTPP
Semester 3
Connection to the curriculum
Elective Module
97
Module: Advanced Control System
Module Advanced Control System
Module level Master
Subtitle ACS
Lecture See list of lectures and examinations of the module
Semester 3
Person in charge Dr.-Ing. Berno J.E. Misgeld, M.Sc.
Lecturer Dr.-Ing. Berno J.E. Misgeld, M.Sc.
Language English
Assignment to the curriculum
Elective Module
Teaching form Examination, Lecture, Exercise
Workload Total 120h, Lecture hours 45h , Self-study 75h
Lecture hours 45
ECTS-Credit Points (CP)
4
Requirements according to examination regulation
Course work (30%) and oral examination (70%). The final grade is calculated from coursework and oral examination achievement. Modalities of the examination will be discussed with students at the first lecture.
Learning objectives
Advanced Control System
Overall goal: Students develop an advanced understanding of multivariable system analysis and apply modern robust control techniques. This includes the application of for Students understand and apply state-space, as well as frequency domains methods, for multivariable systems. After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
understand and apply modern multivariable analysis and control
synthesis for complex processes in order to design feedback
controllers;
are familiar with uncertainties modelling for dynamic processes and
multiple and opposed design goals for controller synthesis;

98
understand and apply state-space, as well as frequency domains
methods, for multivariable systems.
Abilities / Skills
Students
use modern time and frequency domain methods for analysis and
design of controllers for multivariable plants.
Competencies
Students
analysing linear multivariable processes and synthetise optimal
robust controllers.
Content
Advanced Control System
• Fundamentals of multivariable systems and representation • Analysis of multivariable systems, modelling of uncertainties • General control configuration, performance and robustness • H2- (LQR/LQG) control • Introduction to robust H∞-control • Implementation aspects of robust controllers • mu-Synthesis
Media e-Learning L2P, Power Point, Script
Literature
• S. Skogestad und I. Postlethwaite, Multivariable Feedback Control, Wiley, 2005 • M. Morari und E. Zafiriou, Robust Process Control, Prentice-Hall International, 1989 • B. A. Francis, A Course in Hinf-Control Theory, Springer-Verlag, Berlin, 1987
• R. A. Hyde, Hinf-Aerospace Control Design, Prentice-Hall International, 1989
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Advanced Control System
4 0 0 30 (oral exam)
Lecture: Advanced Control System
0 2 40 0
Exercise: Advanced Control System
0 1 35 0
Teaching Unit / Examinations: Examination Advanced Control System

99
Title Examination Advanced Control Systems
Sub-title Exa ACS
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Lecture Advanced Control System
Title Lecture Advanced Control System
Sub-title L ACS
Semester 3
Connection to the curriculum
Elective Module
Teaching Unit / Examinations: Exercise Advanced Control System
Title Exercise Advanced Control System
Sub-title E ACS
Semester 3
Connection to the curriculum
Elective Module

100
Elective Courses – Fourth Term
Module: Internship (Industrial Track)
Module Internship
Module level Master
Subtitle I
Lecture See list of lectures and examinations of the module
Semester 4
Person in charge Univ.-Prof. Dr. rer. pol. Burkhardt Corves
Lecturer Univ.-Prof. Dr. rer. pol. Burkhardt Corves
Language English
Assignment to the curriculum
Elective module
Teaching form Internship report (Examination), Internship
Workload Total 12 weeks
ECTS-Credit Points (CP)
10
Requirements according to examination regulation
none
Learning objectives See guidelines for practical training in the examination regulations
Content See guidelines for practical training in the examination regulations
Media -
Literature -
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Internship
10 0 0 -
Internship: Internship
0 0 300 0

101
Teaching Unit / Examinations: Examination Internship
Title Examination Internship
Sub-title Exa I
Semester 4
Connection to the curriculum
Elective module
102
Module: Research Project (Academic Track)
Module Research Project
Module level Master
Subtitle RP
Lecture See list of lectures and examinations of the module
Semester 4
Person in charge Univ.-Prof. Dr. rer. pol. Burkhardt Corves
Lecturer Univ.-Prof. Dr. rer. pol. Burkhardt Corves
Language English
Assignment to the curriculum
Elective module
Teaching form Research Project report (Examination) (Exa)
Workload Total 12 weeks
Lecture hours -
ECTS-Credit Points (CP)
10
Requirements according to examination regulation
none
Learning objectives
Research Project
After successfully completing this course, the students will have acquired the following learning outcomes:
Knowledge / Understanding
Students
know how to plan a research project;
know how to design experiments to get a maximum output (effects
and interactions of the parameters on the result);
know how to evaluate the results using advanced statistical methods.
Abilities / Skills
Students
work independently on a scientific topic.
103
Competencies
Students
analyse the problem at-hand;
determine possible ways to solve it, explain the best way to do so by
comparing and assessing the given possibilities;
apply the chosen way to solve the problem;
document every step of the project;
present their results oral and written.
Content
Research Project
Basics of project management
Basics of time planning
Planning experiments
Evaluation of results with statistical methods
Oral and written presentation of results
Actual project work on a subject chosen by student from a wide range of topics offered at IMGR
Media e-Learning L2P, Power Point
Literature Lecture Notes
Students also receive a list of relevant literature
Lectures / Examinations
Title Code ECTS
Workload (SWS / h) Duration of Exam (min)
Lecture h. (SWS)
Self-Study (h)
Examination: Research Project
10 0 0 -
Lecture/Exercise: Research Project
0 0 300 0
Teaching Unit / Examinations: Examination Research Project
Title Examination Research Project
Sub-title Exa RP
Semester 4
Connection to the curriculum
Elective module

104
Compulsory Course – Fouth Term
Module: Master Thesis
Module Master Thesis
Module level Master
Subtitle MaTh
Lecture See list of lectures and examinations of the module
Semester 4
Person in charge RWTH Aachen
Lecturer RWTH Aachen
Language English
Assignment to the curriculum
Compulsory Module
Teaching form Supervision and assistance by the relevant professor
Workload 6 Months
Lecture hours -
ECTS-Credit Points (CP)
20
Requirements according to examination regulation
The topic of the Master thesis cannot be assigned until 80 CPs have been achieved. Reasonable exceptions are governed by the Board of Examiners upon request by the candidate. The Master´s defense colloquium must be held four weeks after the written completion of the Master´s Thesis.
Learning objectives The students learn the independent approach and processing of academic themes, their documentation and written interpretation within a set deadline. They acquire systematic academic research skills.
Content Completed academic paper which shall show that the students are capable of independently processing a problem related to their subject according to academic methods within a set deadline.
Media -
Literature According to the relevant research questions of the Master Thesis
Lectures / Examinations
Title Code ECTS Workload (SWS / h)

105
Lecture h. (SWS)
Self-study (h) Duration of Exam (min)
Master Thesis 20 0 0 0
Master Defense colloquium
0 0 0 15-60
Teaching Unit / Examinations: Examination Master Thesis
Title Master Thesis
Sub-title Exam MaThe
Semester 4





























