Embed Size (px)
Citation preview
Reconfiguration Reconfiguration Mechanism DesignMechanism Design
Mark YimAssociate Professor and Gabel Family Associate Professor Dept. of Mechanical Engineering and Applied Mechanics, University of Pennsylvania
There are two fundamental electro-mechanical components to self-reconfiguring robot systems– An attaching/detaching mechanism– Some form of motion between
reconfigurations.
Focus on hardware, however, choices in hardware effect software design and vice versa.

Costs of micro-scale deviceCosts of micro-scale device((pessimistic view)pessimistic view) Module: 1mm x 1mm x 1mm MEMS (silicon) Silicon cost ~ $1/sq inch
– 2003 Revenue $5.7billion / 4.78 billion sq inch silicon– $200 / 12” diam, $30 /8“ diam wafers– 100um-2000um thick (choose 1mm)
Assume processing costs ~$9/sq inch Modules cost 1.6¢
Synthesize human shape Mark weighs 65 Kg -> 65,000 cm3
– Assume density of water (1kg = 1000 cm3 ) 65,000,000 modules
– 1000 modules per cm3
Cost: $1,007,502.025

Costs of micro-scale deviceCosts of micro-scale device((optimistic view)optimistic view) In mature systems, cost goes by the pound.
– E.g. Xerox machines– Optimization in space/volume
The process cost can be reduced. Ultimately to near the cost of silicon (factor of 10 savings)
Fill factor of modules does not need to be 100% (factor of 10 savings)
Find a smaller person to synthesize (factor of 2 savings)
Cost $5,037
OutlineOutline
Review of Motion mechanisms – Chain style reconfiguration– Lattice style reconfiguration
Review of Latching mechanisms Discussion
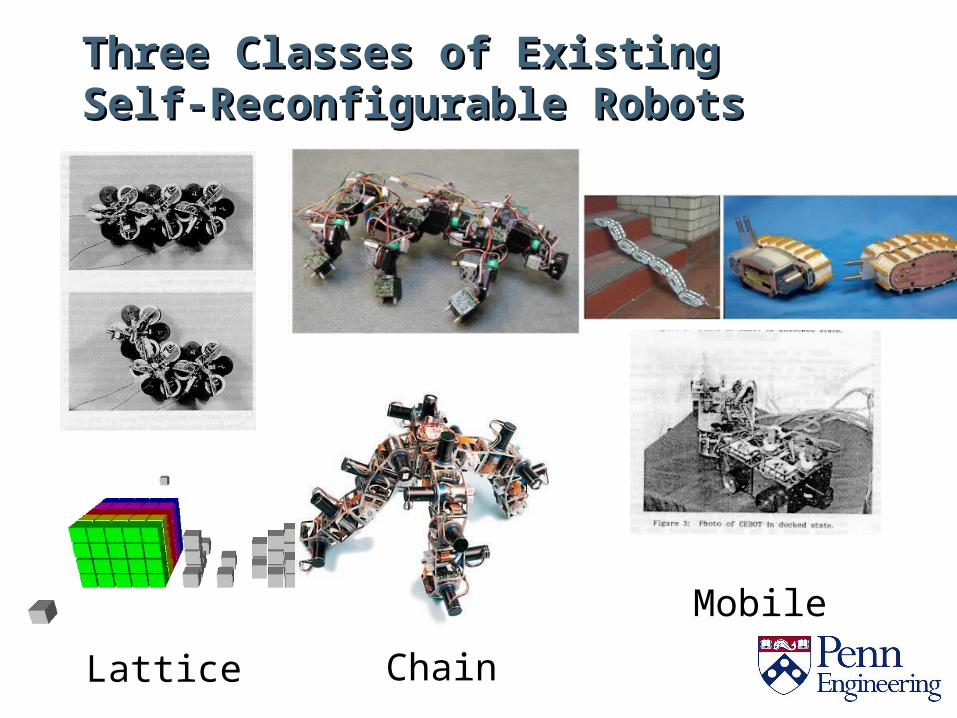
Three Classes of Existing Three Classes of Existing Self-Reconfigurable Robots Self-Reconfigurable Robots
ChainLatticeMobile

Telecube G1Telecube G1
Lattice Self-Lattice Self-ReconfigurationReconfiguration

Proteo (never built)Proteo (never built)Proteo
Rhombic Face(Edge length = 5 cm)
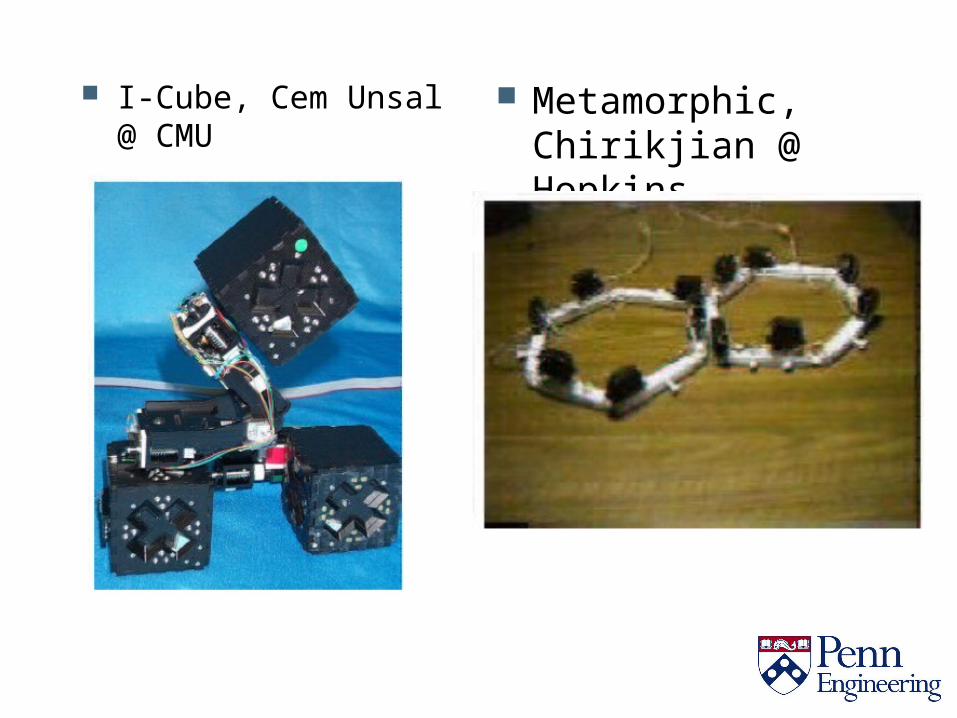
I-Cube, Cem Unsal @ CMU
Metamorphic, Chirikjian @ Hopkins
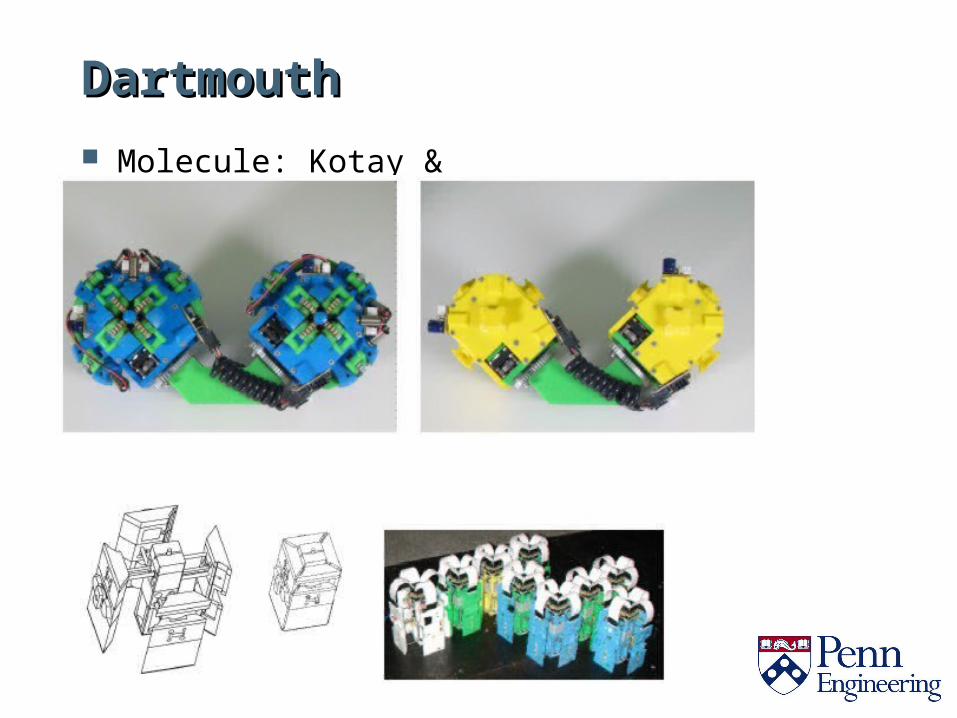
DartmouthDartmouth Molecule: Kotay &
Rus
Crystal: Vona & Rus

Satoshi Murata (lattice)Satoshi Murata (lattice) Fracta
3D fracta
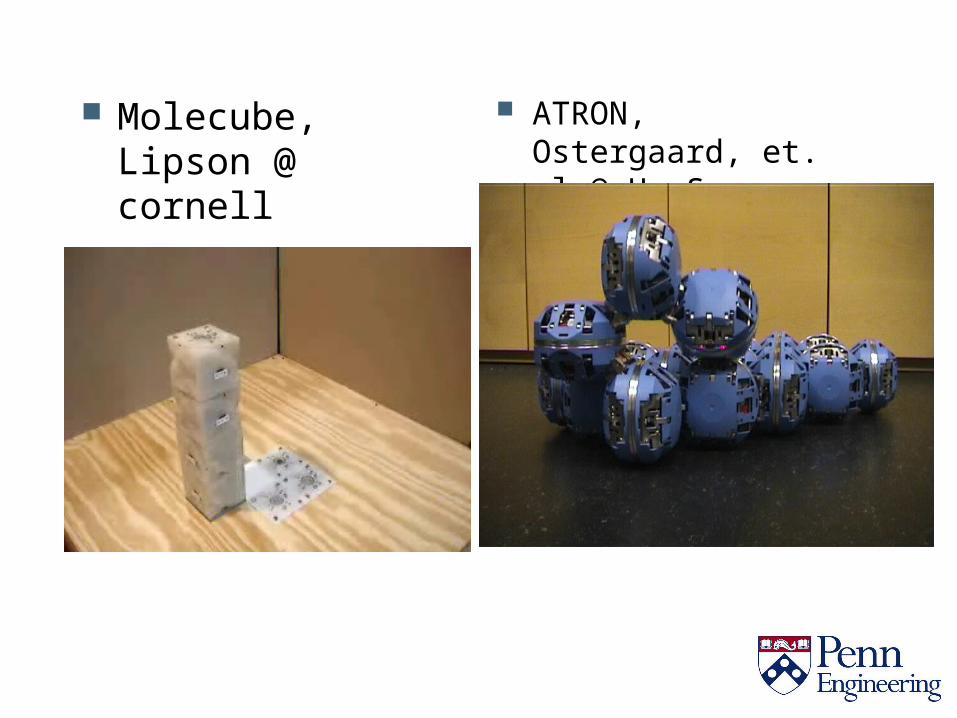
Molecube, Lipson @ cornell
ATRON, Ostergaard, et. al @ U. S. Denmark

Riken, Vertical
Inoue, Pnumatic
Stochastic/Graph GrammarsStochastic/Graph Grammars
No main actuation (external)– Klavins– Lipson
Latching– Magnets– Pressure differential in oil

Chain Self-ReconfigurationChain Self-ReconfigurationPolyBot Generation 2 (G2), and PolyBot Generation 2 (G2), and 3 (G3)3 (G3)

Polypod UPenn superbot
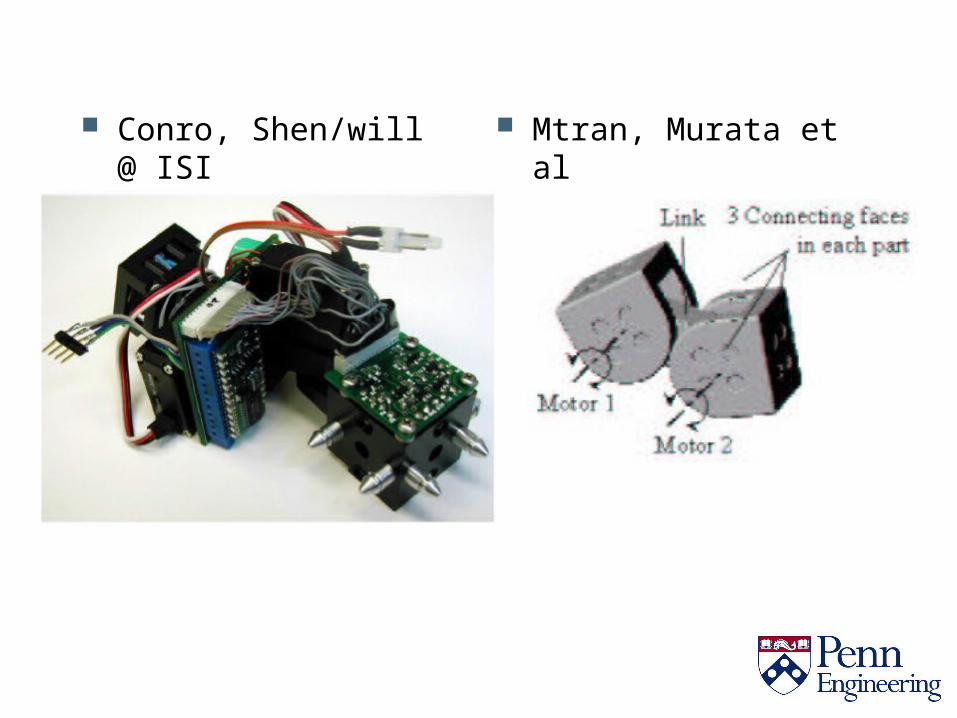
Conro, Shen/will @ ISI
Mtran, Murata et al
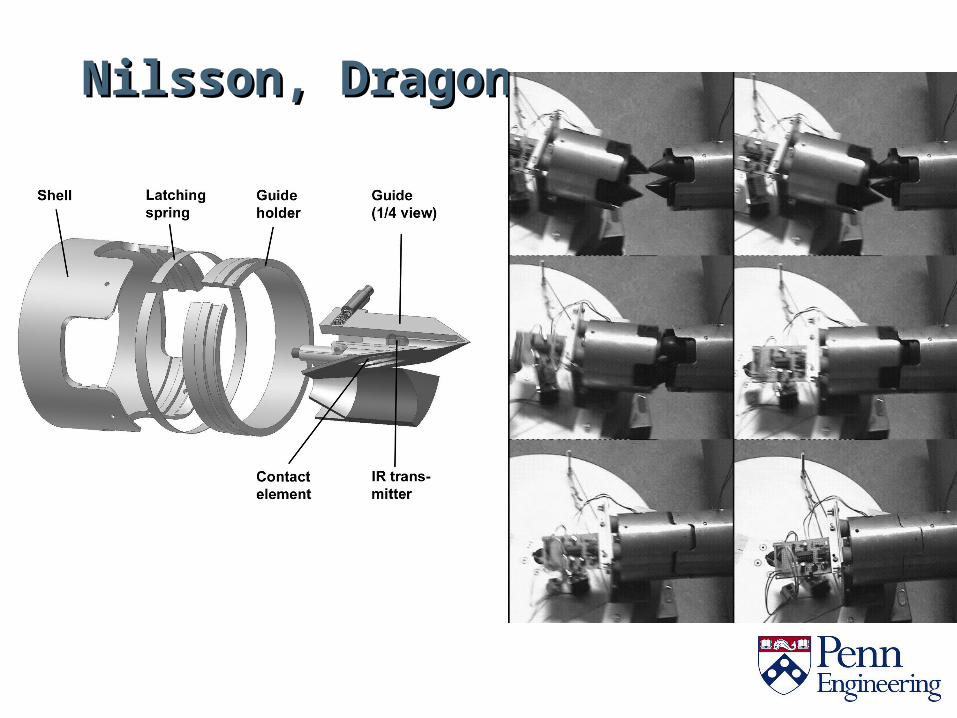
Nilsson, DragonNilsson, Dragon
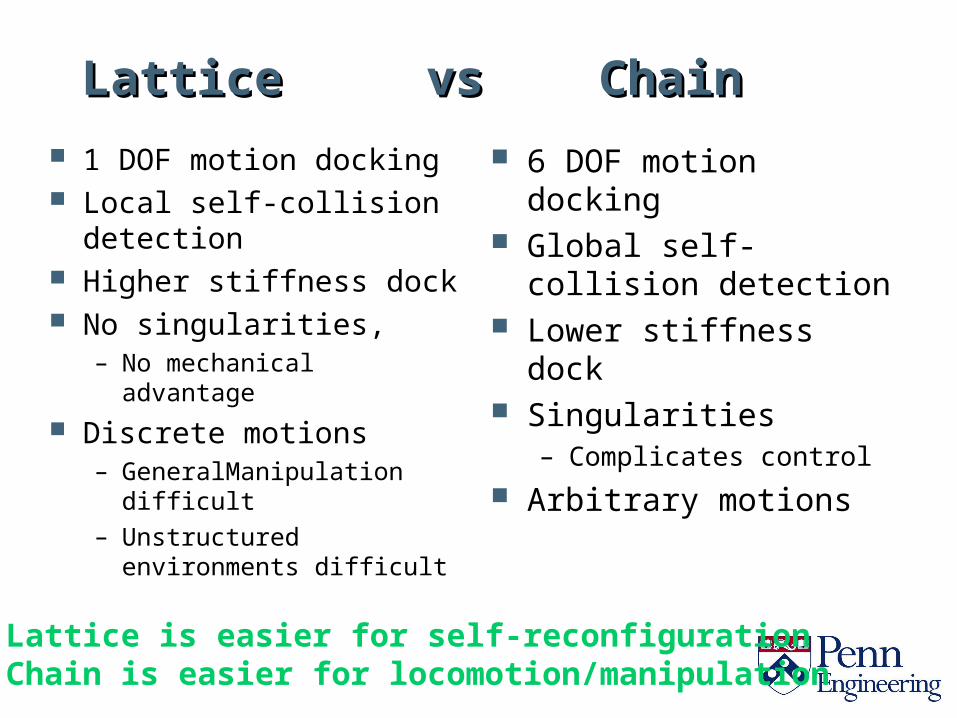
Lattice vs ChainLattice vs Chain 1 DOF motion docking Local self-collision
detection Higher stiffness dock No singularities,
– No mechanical advantage
Discrete motions– GeneralManipulation
difficult– Unstructured
environments difficult
6 DOF motion docking Global self-collision
detection Lower stiffness dock Singularities
– Complicates control Arbitrary motions
Lattice is easier for self-reconfigurationChain is easier for locomotion/manipulation
Main drives:Main drives: Geared DC motors (most popular) Magnetic Pneumatic None
Not shown yet: Combustive: easier if modules are large Thermal (nuclear?): perhaps in space Mechanochemical: does this exist? Electrostatic: ok if small? High voltages Molecular motors: if very tiny
Latching mechanismsLatching mechanisms
Magnetic – issue: strength Mechanical – issue: actuator (size
(strength/speed)) Pneumatic – issue: valves, supply Hydraulic – issue: valves, supply
Not shown yet: Electrostatic: ok if small? High voltages Dry Adhesive: attach/detach motion?
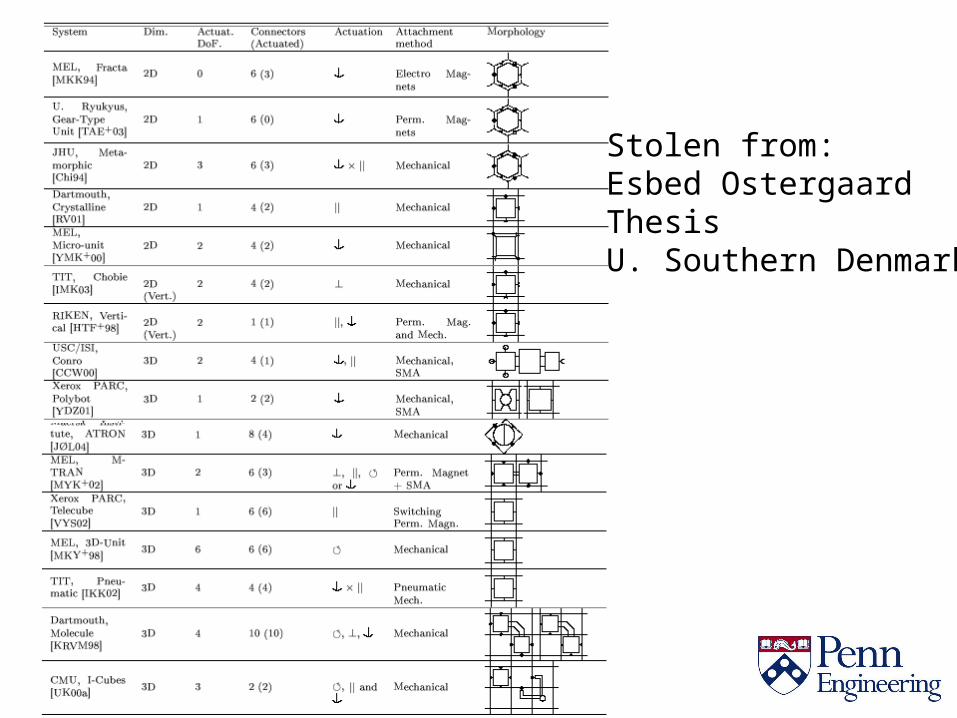
Stolen from:Esbed OstergaardThesisU. Southern Denmark

QuestionsQuestions
What are the important parameters for the motion part? What are the tradeoffs?– DOF?– Shape?– #of attachments– Workspace?
What are the important parameters for attaching/detaching mechanisms?

Item Tradeoff Metric
DOF Complexity vs capability, cost
# of DOF, MTBF (per task)
What on earth are we going to What on earth are we going to do with these robots?do with these robots?
NASA program– It’s going to be more robust to send specialized machine per task– Multifunction cost savings vs capability– Space station repair– Mars exploration– Moon station (selfreplication)
Construction – Locomotion with manipulation– E.g. mine sensor support w/shoring– Building construction– Architecture
Exploration– Search and rescue– Undersea mining– Planetary mining
Shape only– Structures– Telepario– Shady robots– Programmable antennae
Research contribution for itself On microscale
– Self assembling chips (self-walking chips?)– Mechanical RSA (tiles form shapes to open locks)– Mechanical FPGA

Shape vs function– 3 people do shape only
Fundamental assumptions(?) Self
– Organizing– Reconfiguring– Repairing – Funding
Communities to relate to?– Complexity systems community– Nanoscience community (foundations of nanoscience)
Availability of low cost reliable hardware helps to enable robotics research– Common platform, (e.g. mote like)
Sources of funding?– DARPA, NSF, Europe, (Brad has money)– Japan Aist/TiTech last








![Ani-Bot: A Modular Robotics System Supporting Creation ......the whole lifecycle of modular robotics, namely Creation, Tweaking, and Usage [29]. Therefore, we propose Ani-Bot, a modular](https://img.dokumen.tips/doc/110x75/5fece09f8387ec3643576562/ani-bot-a-modular-robotics-system-supporting-creation-the-whole-lifecycle.jpg)














![Modular self reconfigurable robot systems [grand challenges of robotics]](https://img.dokumen.tips/doc/110x75/55820b9ad8b42aa9498b528e/modular-self-reconfigurable-robot-systems-grand-challenges-of-robotics.jpg)





