Embed Size (px)
Citation preview

Modern Control SystemEKT 308
Design of Feedback Control Systems

Control System Design: Concerned with the arrangement , or the plan , of the system structure and the selection of suitable components and parameters.
Compensator: Additional component or circuit that is inserted into a control system to compensate for deficient performance.
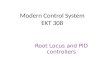
Types of Compensation: i) Cascade Compensation ( figure 1.a)ii) Feedback Compensation (figure 1.b)iii) Output Compensation (figure 1.c)iv) Input Compensation (figure 1.d)

Types of Compensation
Figure 1: Types of compensation

Cascade Compensation Networks
).( process
specified with thecascaded is )(function network on Compensati
sG
sGc
n
jj
M
ii
c
c
ps
zsKsG
sG
1
1
)(
)()(
, )( of form General

Consider the following first order compensation transfer function
)(
)()(
ps
zsKsGc
The compensation network is called phase-lead network if |z| < |p|
1 Clearly,
}or , {here, 1
]1[
1
]1[
1)/(
]1)/()[/()()(
by,given isnetwork theof responsefrequency The
11
zpj
jK
j
jK
pj
zjpKz
pj
zjKsGc
)(tan)(tan)()(
by,given is responsefrequency of Angle11 jGc

Because zero occurs first on the frequency axis, we obtain a phase-lead characteristic, as shown in the following figure 3.
Figure 3: Bode diagram of phase lead network.

Example of phase lead compensation network
2
212121
2121
1
21
2
1
12
2
12
2
1
2
and )]/([ define, usLet
1)]/([
1
)/(1)/(
)1
||()(
)()(
network, theoffunction Transfer
R
RRCRRRR
CsRRRR
CsR
RR
R
CsRCsR
R
R
sCRR
R
sV
sVsGc

1 clearly Where,
1
11)(
function,r on transfecompensati lead-phase aobtain weThus,
2
21
R
RR
s
ssGc
Phase – Lag network
Consider the following first order compensation transfer function
)(
)()(
ps
zsKsGc
The compensation network is called phase-lag network if |z| > |p|

Example of phase lag network
1)(
1
)/(1
)/(1
)(
)()(
network, lag-phase theoffunction Transfer
21
2
21
2
CsRR
CsR
CsRR
CsR
sV
sVsG
in
oc

network. lag-phase aget weThus, plane.- in theorigin theto
closer lies pole theand |z| |p| ,1/)( As
)/(1 and /1,
1
1
1)(
obtain, we,/)( and defining,By
221
2212
s
RRR
pzwhere
ps
zs
s
ssG
RRRCR
c
Frequency response of the transfer is given by,
j
jjGc
1
1)(
) and ( of valuesdifferent for two
figure in theshown is )( negative with diagram Bode
21

Figure 5 : Bode diagram of the phase – lag network.

Phase Lag Design using Bode Diagram
Tjw
jwTjwGc
1
1)(
network, lag phase offunction Transfer
Steps to design an appropriate phase lag network.
1. Obtain Bode diagram for the uncompensated system. (Gain adjusted for desired error constant).
2. Determine the phase margin. If insufficient, follow the remaining steps.
3. Determine the frequency where the phase margin would be satisfied, if the magnitude curve crosses 0-db at this freq. (allow 5 degree safety)
4. Place the zero one decade below the new cross over frequency.5. Measure the necessary additional attenuation at the new
crossover freq

!!!
/)/(1 as pole theCalculate 7.
.frequency crossover new at the log20 isnetwork
lag phaseby introducedn attenuatio that notingby Calculate 6.
c
Completed
zp

Phase lag design example
)5.01()2(
function, transfer loopopen following
with theated) (uncompens systemfeedback unity aConsider
jwjw
K
jwjw
K v
o45 :margin Phase
20 :Target vK
Steps:
Uncompensated Bode diagram is shown in figure 6.

Figure 6:

increased. bemust margin phase So,
20 plot) Bode (from system ated uncompens in themargin Phase o
10
log 20 db 20
:follows as find We
6) figure (from db 20
frequency,crossover new be to cause tonecessary n Attenuatio
5.1 frequency,crossover new this6, figureIn
-13050-180)( where,frequency Locate
50for design lag),or (compensatfactor safety for 5 Allowing
c
o
oo
c

66.66
66.615.0/1 Then,
015.010/15.0 and
15.010/5.1 So,
zero. below decade one pole theand
crossover thebelow decade oneat zeroput weTherefore,
p
z
)66.661)(5.01(
)166.6(20)()(
then,is system dcompensate The
jwjwjw
jwjwGjwGc

Modern Control SystemEKT 308
Design of Feedback Control Systems
(contd…)

Lead-Lag Compensation
Figure 1: RC lead-lag network.
Provides the attenuation of phase lag network. Provides the phase angle of the phase lead network.

Transfer function of lead-lag network
)/(1)/()1(
)1(
))/(1||())/(1(
))/(1(
)(
)(
11
11
2
22
2
22
1122
22
1
2
sCRsCR
sCsCR
sCsCR
sCRsCR
sCR
sV
sV
)/(1)/())/(1)(1(
)1(
11
1121122
22
sCRsCRsCsCRsCR
sCR

121122
1122
1
11
1121
1122
22
)1)(1(
)1)(1(
1
)/()1
)(1(
)1(
RsCsCRsCR
sCRsCR
sCsCR
sCRsCsCsCR
sCR
sCR
)(
)(
1
2
sV
sV
1)(
)1)(1(
2221112
2121
1122
sCRCRCRsCCRR
sCRsCR

Denote,
1 and 1 ,
)1)(1(
)1)(1(
)(
)( Now,
1. ,
and
, ,
21
21
1
2
221121
22211121222111
where
ss
ss
sV
sV
Clearly
CRCR
CRCRCRCRCR
network lag-Phase)1(
)1(
network. lead-phase)1(
)1(
2
2
1
1
s
s
s
s

Finding from root - locus
)cos(
axis. real theside negative thefrom
measuredorigin at locusroot on point by the made angle theof
cosine theis locusroot on thepoint any for ,
So

Thank You