Embed Size (px)
Citation preview

Modern Control Systems
(ECEG-4601)
Instructor: Andinet Negash
Chapter 1
Lecture 1: Mathematical
Model of Control Systems

Introduction
Definition:
The mathematical model of a dynamic system is a set of equations
that represents the dynamics of the system accurately or at least
fairly well
A one-component system
10/30/2013 2 Chapter 1: slide 1

Introduction
The equation:
Relates the physical quantities with the
component
Determining the system’s mathematical
model is essentially an approximation of the
behavior of a physical system with an ideal
mathematical expression.
Riv iv,
R
10/30/2013 3 Chapter 1: slide 1

Introduction
To have greater accuracy, one must take into account additional factors: for example, that the resistance R changes with temperature.
And, consequently, the relation should have the nonlinear form , where R(i) denotes that R is a nonlinear function of the current i.
However, it is well known that this more accurate model is still an approximation of the physical system.
In general, the mathematical model can only give an approximate description of a physical system.
Riv )(iRv
10/30/2013 4 Chapter 1: slide 1
Introduction
Simplicity Versus Accuracy.
Compromise between the simplicity of the model and the accuracy of the results of the analysis.
In deriving a reasonably simplified mathematical model, we frequently find it necessary to ignore certain inherent physical properties of the system.
If a linear lumped-parameter mathematical model (that is, one employing ordinary differential equations) is desired, it is always necessary to ignore certain nonlinearities and distributed parameters that may be present in the physical system.
If the effects that these ignored properties have on the response are small, good agreement will be obtained between the results of the analysis of a mathematical model and the physical system.
10/30/2013 5 Chapter 1: slide 1

Introduction
The problem of deriving the mathematical model of a system
usually appears as one of the following two cases.
1. Derivation of System’s Equations
2. System Identification
Derivation of System’s Equations
In this case, the system is considered known.
10/30/2013 6 Chapter 1: slide 1
Introduction
Here, we know the components R, L, C1, and C2 and their
interconnections.
To determine a mathematical model of the network, one may apply
Kirchhoff’s laws and write down that particular system of
equations which will constitute the mathematical model.
From network theory, it is well known that the systems of equations
sought are the linearly independent loop or node equations.
System Identification In this case the system is not known.
By ‘‘not known,’’ we mean that we do not know either the system’s
components or their interconnections.
The system is just a black box.
10/30/2013 7 Chapter 1: slide 1

Introduction
In certain cases, we may have available some apriori (in advance)
useful information about the system, e.g., that the system is time-
invariant or that it has lumped parameters, etc.
Based on this limited information about the system, we are asked to
determine a mathematical model which describes the given system
‘‘satisfactorily.’’
10/30/2013 8 Chapter 1: slide 1

Introduction
Here, both the physical system and the mathematical model are
excited by the same input u(t).
Subsequently, the difference e(t) of the respective responses y1and
y2 is measured.
If the error e(t) is within acceptable bounds, then the mathematical
model is a satisfactory description of the system.
The acceptable bounds depend on the desired degree of accuracy of
the model, and they are usually stated in terms of the minimum
value of the following cost function:
10/30/2013 9 Chapter 1: slide 1
1
0
)(2
t
t
dtteJ
Introduction
Types of Mathematical Models
Several types of mathematical models have been proposed for the description of systems.
1. The differential equations
2. The transfer function
3. The impulse response
4. The state equations.
There are other ways of describing a system, aiming to give a schematic overview of the system.
1. The block diagrams
2. The signal-flow graphs
10/30/2013 10 Chapter 1: slide 1

Introduction
Differential Equations
The mathematical model of differential equations (or, more
generally, of integro-differential equations) is the oldest method of
system description.
This description includes all the linearly independent equations of
the system, as well as the appropriate initial conditions.
Example 1:
10/30/2013 11 Chapter 1: slide 1
Introduction
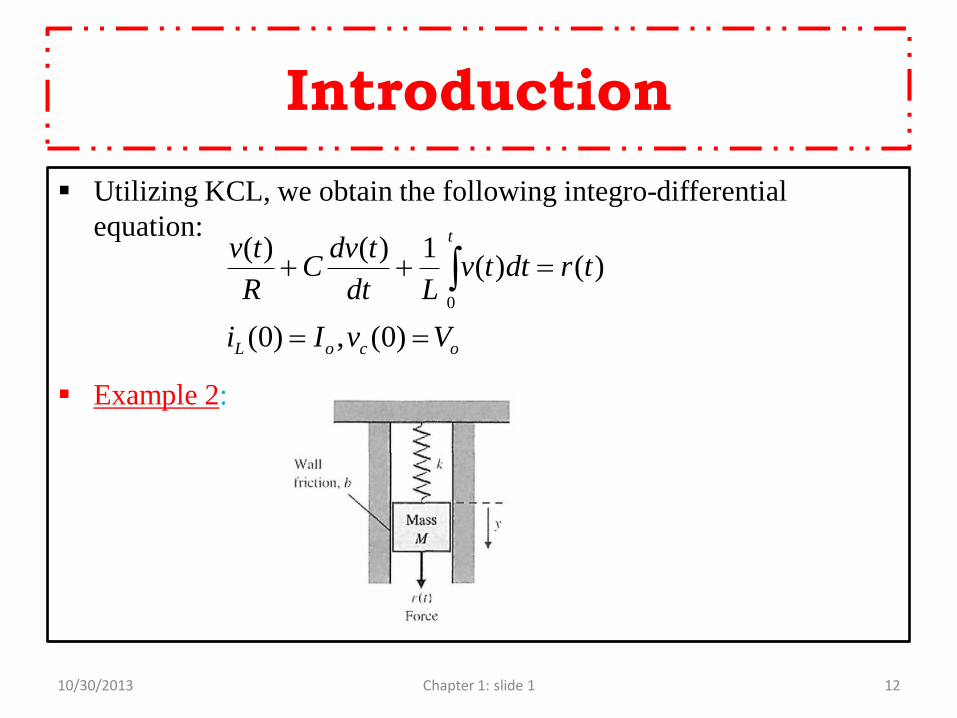
Utilizing KCL, we obtain the following integro-differential
equation:
Example 2:
10/30/2013 12 Chapter 1: slide 1
ocoL
t
VvIi
trdttvLdt
tdvC
R
tv
)0(,)0(
)()(1)()(
0
Introduction
Summing the forces acting on M and utilizing Newton's second law
yields:
The solution of the differential equation describing the process may
be obtained by classical methods such as the use of integrating
factors and the method of undetermined coefficients.
The method of differential equations can be applied to many
categories of systems, such as linear and non linear, time-invariant
and time-varying, with lumped and distributed parameters, with zero
and non-zero initial conditions and many others.
10/30/2013 13 Chapter 1: slide 1
oo Vdt
dyvYy
trtkydt
tdyb
dt
tydM
)0(,)0(
)()()()(
2
2
Introduction
Transfer function
The transfer function method is a description in the frequency
domain and holds only for linear time-invariant systems having zero
initial conditions.
Example 3: Reconsider the spring-mass-damper system described by
We wish to obtain the response, y, as a function of time.
10/30/2013 14 Chapter 1: slide 1
u(t)r(t)23, kbM
trtkydt
tdyb
dt
tydM
, ,1
)()()()(
2
2

Introduction
The Laplace transform is:
Regrouping,
The response can be decomposed into two parts.
10/30/2013 15 Chapter 1: slide 1
)()(2)0()(3)0()0()(2 sUsYussYysysYs
response state-
2
responseinput -
2)(
23
1
23
)0()0()3()(
zerozero
sUssss
yyssY

Introduction
The first part is excited exclusively by the initial state and is called
zero-input response.
The second part is excited exclusively by the input and is called the
zero-state response.
Zero-input response – characteristic polynomial
If u(t)=0 for t0, then
This is called the homogeneous equation.
On application of Laplace transform, we obtain:
10/30/2013 16 Chapter 1: slide 1
0)(2)(
3)(
2
2
tydt
tdy
dt
tyd

Introduction
Whose solution is given as:
Where
is called the characteristic polynomial because it governs the free,
unforced or natural response of the system
10/30/2013 17 Chapter 1: slide 1
23
)0()0()3()(
2
ss
yyssY
)]0()0([
)0()0(2
)(
2
1
2
21
yyk
yykwhere
ekekty tt
232 ss

Introduction
Zero-state response: transfer function
Here, we have
Where the rational function:
is called the transfer function.
10/30/2013 18 Chapter 1: slide 1
)(23
1)(
2sU
sssY
23
1
)(
)()(
2
sssU
sYsG
00][
][
)(
)()(
ICIC
Input
Output
sU
sYsG
LL

Introduction
A transfer function may be defined only for a linear, stationary
(constant parameter) system.
A non stationary system, often called a time-varying system, has one
or more time-varying parameters, and the Laplace transformation
may not be utilized.
Furthermore, a transfer function is an input-output description of the
behavior of a system.
Thus, the transfer function description does not include any
information concerning the internal structure of the system and its
behavior.
10/30/2013 19 Chapter 1: slide 1

Introduction
Impulse-Response Function.
Consider the output (response) of a system to a unit-impulse input
when the initial conditions are zero.
Since the Laplace transform of the unit-impulse function is unity,
the Laplace transform of the output of the system is:
The inverse Laplace transform of G(s), or
is called the impulse-response function.
This function g(t) is also called the weighting function of the
system.
10/30/2013 20 Chapter 1: slide 1
)()( sGsY
)()(1 tgsG L

Introduction
The impulse-response function g(t) is thus the response of a linear
system to a unit- impulse input when the initial conditions are zero.
The Laplace transform of this function gives the transfer function.
Therefore, the transfer function and impulse-response function of a
linear, time-invariant system contain the same information about the
system dynamics.
It is hence possible to obtain complete information about the
dynamic characteristics of the system by exciting it with an impulse
input and measuring the response.
In practice, a pulse input with a very short duration compared with
the significant time constants of the system can be considered an
impulse
10/30/2013 21 Chapter 1: slide 1

Introduction
Linear Approximations of Physical Systems
A great majority of physical systems are linear within some range of
the variables.
In general, systems ultimately become nonlinear as the variables are
increased without limit.
For example, the spring-mass-damper system is linear and described
by the linear equation as long as the mass is subjected to small
deflections y(t).
However, if y(t) were continually increased, eventually the spring
would be over extended and break.
Therefore the question of linearity and the range of applicability
must be considered for each system.
10/30/2013 22 Chapter 1: slide 1

Introduction
The necessary condition for a linear system can be determined in
terms of an excitation x(t) and a response y(t).
1. Principle of Superposition:
2. Property of Homogeneity:
Example 4: Is the system represented by the following relation
linear? Which property is not satisfied?
10/30/2013 23 Chapter 1: slide 1
2121
22
11 then, yyxx
yx
yx
constant is );()( ),()( tytxthentytx
bmxy

Introduction
The above system may be considered linear about an operating point
x0,y0 for small changes Δx and Δy.
which satisfies the necessary conditions.
Consider the function
If the function is continuous over the range of interest with an
operating point x0 the Taylor series expansion about x0 will be:
10/30/2013 24 Chapter 1: slide 1
xmyor
bxmmxyybmxy
yyyxxx
,
or
and when,
00
00
)()( txgty

Introduction
If the dependent variable y depends upon several excitation
variables, then the functional relationship is written as:
The Taylor series expansion about the operating point x10 , x20 , x30 ,
… , x10 will be: [neglecting HOTs]
10/30/2013 25 Chapter 1: slide 1
!2
!1)()(
2
0
2
2
0
0
00
xx
dx
gdxx
dx
dgxgxgy
xxxx
n
xxxgy ,,,21
!1
!1
!1
),,( 0202
2
101
1
02010
000
nn
xxnxxxx
n
xx
dx
dgxx
dx
dgxx
dx
dgxxxgy

Introduction
Example 5: Consider the pendulum oscillator shown below. The
torque on the mass is T=MgLsinθ where g is the gravity constant.
The equilibrium condition for the mass is θ0=0°. The nonlinear
relation between T and θ is shown graphically.
10/30/2013 26 Chapter 1: slide 1

Introduction
The first derivative evaluated at equilibrium provides the linear
approximation, which is:
This approximation is reasonably accurate for π/4<0<π/4.
For example, the response of the linear model for the swing through
±30° is within 5 % of the actual nonlinear pendulum response.
10/30/2013 27 Chapter 1: slide 1
MgLMgLT
TMgLTT
00cos
0 where;sin
000
0
Introduction
Further Reading:
Identify proper/improper/biproper rational functions.
Revise on the following topics:
The Laplace transform
Solutions of first and second order ODE
For the next lecture revise the following topics:
Matrices
10/30/2013 28 Chapter 1: slide 1





























