Embed Size (px)
Citation preview

http://pig.sagepub.com/Engineering
Engineers, Part G: Journal of Aerospace Proceedings of the Institution of Mechanical
http://pig.sagepub.com/content/225/4/373The online version of this article can be found at:
DOI: 10.1177/09544100JAERO888
2011 225: 373Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace EngineeringY Ochi and M Watanabe
Modelling and simulation of the dynamics of a powered paraglider
Published by:
http://www.sagepublications.com
On behalf of:
Institution of Mechanical Engineers
can be found at:Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace EngineeringAdditional services and information for
http://pig.sagepub.com/cgi/alertsEmail Alerts:
http://pig.sagepub.com/subscriptionsSubscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://pig.sagepub.com/content/225/4/373.refs.htmlCitations:
What is This?
- Apr 1, 2011Version of Record >>
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Modelling and simulation of thedynamics of a powered paragliderY Ochi∗ and M WatanabeDepartment of Aerospace Engineering, National Defense Academy, Yokosuka, Kanagawa, Japan
The manuscript was received on 11 May 2010 and was accepted after revision for publication on 1 September 2010.
DOI: 10.1177/09544100JAERO888
Abstract: This article describes the detailed derivation of a non-linear dynamic model of a pow-ered paraglider (PPG) and a linear dynamics analysis using a linear model obtained from thenon-linear model. In the modelling, the PPG, which consists of a payload and a propulsionunit connected to a canopy at two joints, is assumed to have eight degrees of freedom. Thisassumption allows all the internal forces or tensions on the suspension lines between the canopyand the payload to be eliminated analytically from the equations of motion. As a result, thedynamic model is explicitly obtained in the form of a state-vector equation. Non-linear simu-lation demonstrates the validity of the proposed model through a comparison with the flightexperiment data for a manned paraglider. Furthermore, mode analysis using the linear modelclarifies the dynamic characteristics, and state transformation between the canopy states and thepayload states facilitates the flight control design.
Keywords: paraglider, non-linear dynamics, linear dynamics, internal forces, state transforma-tion, flight control
1 INTRODUCTION
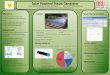
A paraglider is a kind of ram-air parachute with alarger aspect ratio than that of the square type. Thisconfiguration provides desirable properties as a wingsuch as a larger lift-to-drag ratio. It is not only popularamong skydivers, but also useful for airdrop of a loador retrieval of spacecraft, especially, being equippedwith a guidance system. Furthermore, the additionof a power/propelling unit makes a paraglider anunmanned aerial vehicle (UAV) that can be used forland observation, surveillance, etc. Such a paraglideris called a powered paraglider (PPG). A PPG con-sists of a parafoil or canopy and a suspended payloadequipped with an engine or motor and a propeller, asshown in Fig. 1. From the viewpoint of flight dynam-ics and control, the configuration of the PPG providesthe following unique characteristics, as compared to
∗Corresponding author: Department of Aerospace Engineering,
National Defense Academy, 1-10-20 Hashirimizu,Yokosuka, Kana-
gawa 239-8686, Japan.
email: [email protected]
conventional fixed-wing aircraft.
1. The separation between the centres of gravity ofthe canopy and the payload produces a swingingmotion.
2. Changing the thrust induces a considerable pitch-ing motion.
3. Relative pitching and yawing motions exist betweenthe canopy and the payload.
4. The canopy is a tailless flying wing.5. Directional control is mainly achieved through
yawing motion, rather than through rolling motion.6. The apparent mass of the canopy must be taken
into account, as in the case of an airship [1, 2].
Thus, modelling the dynamics of a PPG is morecomplicated than modelling the dynamics of a rigid-body aircraft. The modelling of a paraglider hasbeen investigated in a number of studies. A sim-ple model is the single-rigid-body model with sixdegrees of freedom (DOFs), where the relative motionsbetween the canopy and the payload are neglected [3].However, the relative motions should be taken intoaccount because they affect the attitude of the pay-load on which measurement and propelling units aremounted.
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
373
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Y Ochi and M Watanabe
Fig. 1 Configuration of the PPG
Doherr and Schilling [4] considered a paraglider asa two-body system and proposed a nine-DOF model,based on which seven- and eight-DOF models couldbe obtained by constraining to zero the rotation aboutone or two axes. Slegers and Costello [5], Mooij et al.[6], and Yakimenko [7] adopted the same conceptregarding the coupling between the canopy and thepayload. These models have one joint which facili-tates dealing with the coupling of moments betweenthe two bodies. However, this assumption cannot beapplied directly to a two-joint system in which the ten-sions on the suspension lines affect the moment thatproduces the relative rotation. The two-joint modelrepresents a configuration that is more common andmore suitable for the PPG shown in Fig. 1. A PPG of thistype has eight DOFs (i.e. six DOFs for the canopy andtwo DOFs for the relative pitch and yaw motions of thepayload), where the relative roll motion is neglectedbecause the deformation about the roll axis can gener-ally be considered to be small [8]. There are two pointsthat should be considered in modelling the dynamicsof the two-body two-joint system. One is the selec-tion of the body-fixed co-ordinate systems and theother is how to deal with the tensions on the sus-pension lines. Muller et al. [9] considered a modelof this type, and by explicitly defining the tensionsat the joints to introduce the ‘back turning moment’about the yaw axis of the canopy, they modelled themoment as a function of the tension of the suspen-sion lines as well as the relative yaw angle and its rate.However, they did not provide a complete descriptionof how to deal with the internal forces in the equa-tions of motion. Azuma [1] defined three co-ordinatesystems for the canopy, the payload, and the entire sys-tem. However, the co-ordinate system for the entiresystem is not only unnecessary, but it also makesthe model complex, increasing the number of vari-ables, so that the equations of motion are difficult toderive in the form of state equations, in which the ten-sions are not eliminated. Akasaka et al. [10] deriveda linear model from Azuma’s model by removing
the third co-ordinate system and assuming that theline tension takes a constant value for a trimmedflight condition. Although Slegers recently proposeda non-linear model for this configuration, the inter-nal forces, which were found during the numericalsolution with the model states, were not eliminatedanalytically [11].
Another approach to modelling of PPG dynamicsinvolves the use of analytical mechanics. For example,Wise [12] modelled the dynamics of a small propeller-driven fixed-wing UAV with a parafoil deployed usingLagrange’s equations. The parafoil and the UAV aremodelled as six-DOF systems and are then coupledusing constraints that produce an eight-DOF model.Redelinghuys [13] developed a quasi-Hamiltonian for-mulation, which is also a kind of analytical mechanics,of the eight-DOF equations of motion. Although theformulation requires fewer differentiations than theLagrangian approach, the derivation is still complex,and the introduction of an imaginary displacement todeal with internal line tension requires a special tech-nique in order to stabilize the numerical integration ofthe equations of motion. For a more extensive surveyon the modelling of a paraglider, the reader is referredto reference [7].
The model considered herein is also a two-bodytwo-joint system for which an eight-DOF non-lineardynamic model based on the Newtonian mechan-ics has been derived. Body-fixed co-ordinate systemsare defined for the canopy and the payload, and sixDOFs are allotted to the canopy and two DOFs areallotted to the motion of the payload relative to thecanopy. The relative pitching and yawing motionsbetween the canopy and the payload, which shouldbe damped due to friction at the joint and resis-tance to twisting about the yaw axis, are modelledas a spring-damper system. A unique feature of thepresent model is that all the internal forces are ana-lytically eliminated, which yields a dynamic modelexpressed in the form of a state-vector equation. Tothe authors’ knowledge, there has been no completeanalytical description of the internal forces on the sus-pension lines of a PPG of this type reported in theliterature. In addition, unlike the analytical mechan-ics, Newton’s equations of motion provide a betterunderstanding of the physical meaning of the dynam-ics, which, in turn, provides a flexibility that allowsthe dynamic model to be easily modified following aconfiguration or parameter change. Once a non-linearmodel is obtained, it can be analytically or numericallylinearized for mode analysis as well as control sys-tem design. The linear model clearly determines thedynamic modes as the eigenvalues of the derivativematrix. Although the non-linear model and the lin-ear model are expressed in terms of the canopy states,which are more suitable for describing the aerody-namics of the canopy, when the PPG must be equippedwith a feedback controller, a linear model expressed
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
374
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Modelling and simulation of the dynamics of a powered paraglider
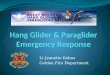
Fig. 2 Schematic three-view drawings of the paraglider: (a) side view from the left (in pitching),(b) front view (in rolling), and (c) top view (in relative pitching and relative yawing)
in terms of the payload state variables is preferredto the canopy-state model because the sensors andthe propelling unit are mounted on the payload. Thiscontradiction was the motivation to derive a statetransformation matrix between the linear state vec-tors that enables the canopy-state equation to beconverted into the payload-state equation.
The validity of the non-linear model is verified byapplying this model to a manned paraglider without apropulsion unit [14] and carrying out a numerical sim-ulation. The results are compared with the flight testdata presented in reference [14]. Derivative matrices ofthe linear models are computed from the non-linearmodel, and a numerical example of the state transfor-mation is given. The usefulness of the linear model andthe state transformation will be demonstrated throughmode analysis, as well as simulation of flight controlusing the propulsion force.
2 NON-LINEAR DYNAMIC MODEL
Figure 2 shows the co-ordinate systems of the PPGused in this study, along with the definition of somevariables and parameters. Figures 2(a) to (c) schemat-ically indicate the PPG when it is seen, respectively,from the negative side of the Yc-axis, the positive sideof the Xc-axis, and the negative side of the Zc-axis.The suspension lines of the canopy are connected tothe payload at two joints, OmR and OmL, where Om is themidpoint between OmR and OmL. It is assumed that themotion of the canopy has six DOFs and that the sus-pension lines are deformed only about the Zc-axis. Thepayload has two DOFs (i.e. relative yawing about theZc-axis, expressed by ψpc and rpc, and relative pitch-ing about the line OmROmL, expressed by θpc and qpc).Thus, the PPG is modelled as a dynamic system witheight DOFs.
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
375
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Y Ochi and M Watanabe
2.1 Co-ordinate systems
The XIYI-plane is horizontal, and the positive directionof the ZI-axis is taken as downward. The location ofthe origin and the positive direction of the XI-axis areappropriately chosen. The canopy-fixed and payload-fixed co-ordinate systems are defined in Fig. 2. Theorigin Oc of the canopy-fixed co-ordinate system ischosen as the centre of gravity (CG) of the canopy, andthe Zc-axis is chosen to run along the direction fromOc to Om. The Xc-axis is perpendicular to the Zc-axisin the symmetry plane of the canopy, and the positivedirection of the Xc-axis is taken as forward. The Yc-axisis defined such that the co-ordinates form a right-hand co-ordinate system. The payload is assumed tobe symmetric, and the origin is taken as the CG. TheXp-axis is taken as forward in the thrust direction, andthe Zp-axis is taken as downward and perpendicu-lar to the Xp-axis in the symmetry plane. The Yp-axisis defined so as to form a right-hand co-ordinatesystem. The XcZc-plane is assumed to correspond tothe XpZp-plane in trimmed straight flight.
2.2 Position, velocity, and acceleration of thepayload
Let lc and lp be the distance between Oc and Om and thedistance between Om and Op, respectively. The posi-tion r p defined in �p is then expressed by the followingequation in �c
rpc = Tpc(rp + lpv) + lcv (1)
where lpv = [0 0 lp]T and lcv = [0 0 lc]T, and Tpc is thetransformation matrix from �p to �c, which is given by
Tpc =⎡⎣cos θpc cos ψpc − sin ψpc sin θpc cos ψpc
cos θpc sin ψpc cos ψpc sin θpc sin ψpc
−sin θpc 0 cos θpc
⎤⎦(2)
The velocity at rp in �p is given by the followingequation in �c
V pc = V c + r pc + ωc × r pc (3)
The velocity expressed in �p is given by V p = T−1pc V pc.
The acceleration at rp in �p is given by the followingequation in �c
Apc = V c + ωc × V c + r pc + ωc × r pc
+ 2ωc × r pc + ωc × (ωc × r pc)
= V c + LpI1ωc + LpI2ωpc + LcI1 + LpI3 (4)
where LcI1 = ωc × V c, and LpI1, LpI2, and LpI3 areexpressed using ωc, ωpc, θpc, and ψpc. Herein, only afterthe motion at the CG Op with respect to the payload isconsidered (i.e. rp is assumed to be 03×1).
2.3 Equations of translational motion
The equation of force balance for the payload in �c isgiven by
F pG + F pA + F pth + F pI + F pT = 03×1 (5)
where the gravity and the inertial force are F pG =mpg [−sin θc cos θc sin φc cos θc cos φc]T and F pI =−mpApc, respectively. Assuming that the propulsionforce acts at the CG of the payload along the Xp-axis(i.e. F pth = Tpc[Fpath 0 0]T), and using equation (4),equation (5) can be rewritten as
EFpIx = F pG + F pA + F pT + F pth − mp(LcI1 + LpI3)
(6)
where x = [V Tc ωT
c qpc rpc θpc ψpc φc θc]T and EFpI =mp[I3 LpI1 LpI2 03×4].
The equation of force balance in the canopy isgiven by
F cG + F cA + F cI + F cT = 03×1 (7)
Each force in equation (7) is represented in�c as follows. The gravity is given by F cG =mcg [− sin θc cos θc sin φc cos θc cos φc]T. The aero-dynamic force on the canopy, F cA, is written as
F cA = F cA0 + AαdV c − F cAM + F cδ (8)
where F cA0 and Aαd are non-linear functions of thecanopy states. The second term of equation (8) isassociated with the lift due to αc.
The apparent-mass matrix is defined as
AAM =[
AAM1 AAM2
AAM3 AAM4
](9)
where AAMi(i = 1, . . ., 4) are 3 × 3 submatrices. Theaerodynamic force F cAM generated by the apparentmass is then expressed as follows [1, 2]
F cAM = AAM1V c + AAM2ωc + F cAM0 (10)
where F cAM0 is given by ωc×(AAM1V c + AAM2ωc) and the
superscript ‘×’ denotes the skew-symmetric matrixform of a vector (corresponding to a cross-productoperation).
The inertial force F cI is given by
F cI = −(mc + A00)(V c + LcI1) (11)
Note that equations (8), (10), and (11) includederivative terms of the state variables. Therefore,equation (7) can be rewritten as
EFcIx = F cG + F cA0 − F cAM0 + F cT
+ F cδ − (mc + A00)LcI1 (12)
where EFcI is a matrix defined as EFcI = [(mc + A00)I3 +AAM1 + Aαd AAM2 03×6].
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
376
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Modelling and simulation of the dynamics of a powered paraglider
2.4 Equations of rotational motion
The equation of moment balance for the payload in �p
is given by
M pA + M pI + M pT + M pdmp = 03×1 (13)
The moments due to gravity and the propulsionforce are zero, because these forces act at the CG, andthe counter torque of the propulsion unit is not takeninto account here.
M pI is given by the following equation
M pI = −Jpωp + M pI1 (14)
where M pI1 = ωp×Jpωp.
The angular velocity of the payload can be expressedusing the canopy states as
ωp = [0 qpc 0]T + T−1pc (ωc + [0 0 rpc]T) (15)
Differentiating equation (15) and using the relationT−1
pc = TTpc yields
ωp = Ωp1 + TTpcωc + �p2ωpc (16)
where Ωp1 = TTpc[pc qc rc + rpc]T and
�p2 =⎡⎣0 − sin θpc
1 00 cos θpc
⎤⎦ (17)
Let the tensions of the canopy suspension linesat points OmR and OmL be F pTRp and F pTLp, respec-tively. The positions of OmR and OmL in �p are givenas lpTR = [0 bp/2 −lp]T and lpTL = [0 − bp/2 − lp]T,respectively. The moment M pT is then expressed aslpTR × F pTRp + lpTL × F pTLp, or
M pT = [LpTc LpTd][F TpTpcl F T
pTpdf ]T (18)
where
LpTc = lp
⎡⎣ 0 1 0
−1 0 00 0 0
⎤⎦ and LpTd = bp
2
⎡⎣ 0 0 1
0 0 0−1 0 0
⎤⎦
The pitching moment due to friction at the jointsOmR and OmL is assumed to be represented by a spring-damper system, as follows
M pdmp = −[0 kmθpc + cmqpc 0]T (19)
With the above expressions of the moments, thefollowing equation is obtained from equation (13),that is
EMpI x = M pA + LpTcF pTpcl + LpTdF pTpdf
+ M pI1 − JpΩp1 + M pdmp (20)
where EMpI = [03×3 Jp TTpc Jp �p2 03×4].
Among the moments on the canopy, which arerepresented in �c, the following equation holds
M cA + M cI + M cT + M cdmp = 03×1 (21)
Each moment in equation (21) is represented in �c
as follows. First, the aerodynamic moment M cA is givenby
M cA = M cAD − M cAM + M cδ (22)
where M cAD represents the aerodynamic moment onthe canopy itself. According to references [1] and [2],M cAM is given by the following equation
M cAM = AAM3V c + AAM4ωc + M cAM0 (23)
where M cAM0 =V c×(AAM1V c + AAM2ωc) + ωc
×(AAM3V c +AAM4ωc).
The inertial moment is given by
M cI = −Jcωc + M cI1 (24)
where M cI1 = ωc×Jcωc.
Then, in a manner similar to M pT in equation (18),M cT is given by
M cT = [LcTc LcTd][F TpTpcl F T
pTpdf ]T (25)
where
LcTc = lc
⎡⎣ 0 1 0
−1 0 00 0 0
⎤⎦Tpc and
LcTd = bp
2
⎡⎣ 0 0 − cos ψpc
0 0 − sin ψpc
cos ψpc sin ψpc 0
⎤⎦Tpc
Since the counter moment of M pdmp acts on thecanopy, M cdmp can be expressed using equation (19)as
M cdmp = Tpc[0 kmθpc + cmqpc 0]T(= −TpcM pdmp)
(26)
Thus, with the expressions of the moments, equa-tion (21) can be rewritten as
EMcI x = M c1 + LcTcF pTpcl + LcTdF pTpdf + M cdmp
(27)
where M c1 = M cAD − M cAM0 + M cI1 + M cδ and EMcI =[AAM3 Jc + AAM4 03×6].
The configuration of the PPG permits relative yaw-ing motion about the Zc-axis, so that the moments dueto the line tension, which are given by equations (18)and (25), resist the relative motion. The moments are
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
377
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Y Ochi and M Watanabe
assumed to be proportional to both the product of therelative yaw angle and the line tension and the relativeyaw rate. The moment can then be expressed by
[0 0 1]TpcM pT = −[0 0 1]M cT = −(kFcTZψpc + crpc)
(28)
where FcTZ is the Zc-axis component of the tension F cT
(i.e. FcTZ = [0 0 1]F cT). According to the above assump-tion for M cT or M pT, FcTZ should be replaced with themagnitude of F cT (i.e. ‖F cT‖), in equation (28). How-ever, this prevents the tension from being eliminated,as shown in the next subsection. This is the reason whyFcTZ, which is the main component of F cT, is used inequation (28).
2.5 Elimination of tension
The equation of motion is obtained by eliminating thetension from equations (6), (12), (20), and (27). First,the internal forces, F cT and F pT, are eliminated fromequations (6) and (12) using the relation F cT = −F pT,so that the resultant equation becomes
EF x = F 1 (29)
where EF = EFpI+EFcI and F 1=F pG + F pA + F pth + F cG +F cA0 − F cAM0 + F cδ − mpLpI3 − (mp + mc + A00)LcI1.
Next, in order to eliminate the tension F pTpdf fromequations (20) and (27), the following matrix is intro-duced
CM =[
CM1
CM2
]
=
⎡⎢⎢⎢⎢⎣
cos θpc cos ψpc 0 sin θpc cos ψpc 1 0 0cos θpc sin ψpc 0 sin θpc sin ψpc 0 1 0
0 1 0 0 0 0− sin θpc 0 cos θpc 0 0 1
0 0 0 0 0 1
⎤⎥⎥⎥⎥⎦
(30)
Here, CM1 is chosen so that the equation CM1
[LTpTd LT
cTd]T = 04×3 holds. Hence, multiplying[M T
pT M TcT]T by CM1 and using equations (18) and (25)
yields
CM1
[M pT + M pdmp
M cT + M cdmp
]= CM1
[LpTc
LcTc
]F pTpcl + M dmp
(31)
where M dmp = CM1[M Tpdmp M T
cdmp]T = (kmθpc + cmqpc)
[−sin ψpc cos ψpc −1 0]T. Similarly, using equa-tion (28), the following equation is obtained
CM2
[M pT
M cT
]= [
0 0 1]
M cT = kFcTZψpc + crpc (32)
Thus, multiplying equations (20) and (27) by CM
from the left-hand side and using equations (31)
and (32) yields
CM
[EMpI
EMcI
]x = C M
[M p1
M c1
]+
[LpcF pTpcl + M dmp
kFcTZψpc + crpc
]
(33)
where M p1 = M pA + M pI1 − JpΩp1 and Lpc = CM1
[LTpTc LT
cTc]T. Furthermore, using the relation F pTpcl =−T−1
pc F cT and equation (12), the internal forces F pTpcl
and FcTZ can be eliminated from equation (33) toobtain
EMx = M 1 (34)
where the vectors and matrices are defined as fol-lows: M 1 = CM[M T
p1 M Tc1]T + [M T
dmp crpc]T − LMF c1 andE M = CM[ET
MpI ETMcI]T − LMEFcI, where LM = [−TpcLT
pc
k[0 0 1]Tψpc]T and F c1 = F cG + F cA0 − F cAM0 + F cδ −(mc + A00)LcI1.
2.6 State equation
Finally, combining equations (29) and (34) in con-junction with the kinematic equations yields thestate-vector equation
x = E−1F (35)
where E and F are defined as E = [ETF ET
M [04×8 I4]T]T
and F = [F T1 M T
1 ωTpc pc + (qc sin φc + rc cos φc) tan θc
qc cos φc −rc sin φc]T, respectively. In addition, if theforces and moments are affine with respect to controlinputs, then equation (35) can be rewritten as
x = f (x) + g(x)u (36)
where u = [FpthX δe δr]T, and f ∈ �12×1 and g ∈ �12×3
are non-linear functions of x, which are determinedfrom E and F .
3 LINEAR DYNAMICS AND STATETRANSFORMATION
3.1 Linear state equations
The state-vector x in equations (35) or (36) is xc . Then,for a trim condition, the following equation holds
f (x∗c) + g(x∗
c)u∗ = 0 (37)
Under the assumption of symmetry of the PPGconfiguration with respect to the XcZc-plane, the non-trivial equations in equation (37) are four equationscorresponding to the forward and downward forcetrim and the pitching moment trim of the canopy andthe payload. Applying the first-order approximation ofTaylor series expansion around the equilibrium point(x∗
c, u∗) to the non-linear model yields
�xc = Ac�xc + Bc�u (38)
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
378
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Modelling and simulation of the dynamics of a powered paraglider
where Ac ∈ �12×12 is a constant matrix obtained by par-tial differentiation of f (xc)+g(xc)u with respect to xc atthe trim point (x∗
c, u∗) and Bc ∈ �12×3 is given by g(x∗c).
Appropriately rearranging the elements of the statevector makes the matrices Ac and Bc block-diagonal,so that equation (38) is separated into two stateequations (i.e. for the longitudinal motion)
�xclong = Aclong�xclong + Bclong�ulong (39)
and, for the lateral-directional motion
�xclat = Aclat�xclat + Bclat�ulat (40)
where �xclong = [�uc �wc �qc �θc �qpc �θpc]T,�ulong = [�FpthX �δe]T, �xclat = [�vc �pc �rc �φc
�rpc �ψpc �ψc]T, and �ulat = �δr.
3.2 State transformation
In the preceding sections, the PPG dynamics aredescribed using the state variables of the canopymotion and the state variables of the relative motion.However, the eight-DOF motion can also be describedusing the state variables of the payload motion andthe relative motion, because the canopy and rela-tive motions uniquely determine the payload motion.The reason for the use of the canopy states in thenon-linear model is that the aerodynamic forces andmoments of the canopy should be described using thecanopy states so that the derivation of the dynamicequation is easy and straightforward. However, sincesensors such as accelerometers, gyros, and camerasare mounted on the payload, expressing the stateequation in terms of the payload states, which aredefined below, would be advantageous for the anal-ysis and synthesis of a flight control system. In thefollowing, linear relations between the canopy statesand payload states are derived from three non-linearrelations, and the linear relations are used to transformthe canopy-state equations into the payload-stateequations.
The following relations hold between the canopyand payload states. First, from equation (3), the veloc-ity of the payload expressed in �c is expressed as
V pc = V c + Kpc1ωc + Kpc2ωpc (41)
where Kpc1 and Kpc2 are defined, respectively, as
Kpc1 =⎡⎢⎣
0 lp cos θpc + lc
−(lp cos θpc + lc) 0
lp sin θpc sin ψpc −lp sin θpc cos ψpc
−lp sin θpc sin ψpc
lp sin θpc cos ψpc
0
⎤⎥⎦ (42)
and
Kpc2 = lp
⎡⎢⎣
cos θpc cos ψpc − sin θpc sin ψc
cos θpc sin ψpc sin θpc cos ψpc
− sin θpc 0
⎤⎥⎦ (43)
By eliminating V pc from equation (41) using therelationV pc = TT
pcV p, the following relation is obtained
V c = TTpcV p − Kpc1ωc − Kpc2ωpc (44)
Second, equation (15) is rewritten as
ωc = TTpcωp − Kpc3ωpc (45)
where Kpc3 is defined by
Kpc3 =⎡⎢⎣
− sin ψpc 0
cos ψpc 0
0 1
⎤⎥⎦ (46)
Third, from the definition of the Euler angles and rel-ative attitude angles, the identical equation equation(47) holds
TIc(φc, θc, ψc) = Tpc(θpc, ψpc)TIp(φp, θp, ψp) (47)
Thus, the three relations, which are given by equa-tions (44), (45), and (47), have been obtained. Apply-ing the first-order approximation of the Taylor seriesexpansion to the equations yields a linear relationbetween the canopy-state vector and the payload-state vector, as follows.
First, equation (44) is linearized as
�V c + K∗pc1�ωc + K∗
pc2�ωpc
= TpcT∗�V p + Kpc4
∗[�θpc �ψpc]T (48)
where the superscript ‘*’ indicates that the functionsand the variables are evaluated at the trim point, andK∗
pc4 is defined as
K∗pc4 = V ∗
p
⎡⎢⎣
sin(α∗p − θ∗
pc) 0
0 cos(α∗p − θ∗
pc)
− cos(α∗p − θ∗
pc) 0
⎤⎥⎦ (49)
where α∗p = tan−1(w∗
p/u∗p). Next, equation (45) is lin-
earized as
�ωc = TT∗pc�ωp − K∗
pc3�ωpc (50)
Finally, from equation (47), the following linearequations are obtained
�θp = �θc + �θpc (51)
[�φp
�ψp
]= 1
cos θ∗p
[cos θ∗
c sin θ∗c 0
sin θ∗pc cos θ∗
pc cos θ∗p
] ⎡⎣ �φc
�ψpc
�ψc
⎤⎦
(52)
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
379
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Y Ochi and M Watanabe
By adding ψc to the state-vector xc and defining thepayload state vector as xp = [V T
p ωTp ωT
pc θpc ψpc φp θp
ψp]T, equations (48), (50) to (52) can be written in theform of a state transformation equation
�xp = T�xc, (53)
where T ∈ �13×13 is a constant transformation matrix.With equation (53), equation (38) is transformed
into the equation expressed in terms of the payloadstates as
�xp = Ap�xp + Bp�u (54)
where Ap = TAcT−1 and Bp = TBc. Since equations (39)and (40) were obtained from equation (38), equation(54) is separated into the longitudinal state equationand the lateral-directional state equation. This meansthat the state transformation matrix itself becomesblock-diagonal by rearranging the state variables.
4 NUMERICAL SIMULATION
4.1 Validation of the non-linear model
In order to verify the validity of the non-linear dynamicmodel, a numerical simulation is performed, and theresults are compared with the flight test data of amanned paraglider in reference [14]. In the flight test,measurement units were fastened to the pilot, andthe accelerations and attitude rates were measured.The span and the chord length of the canopy are 9.95and 3.05 m, respectively, and the masses of the canopyand the payload are 6.4 and 93.0 kg, respectively. Thetrim condition without control inputs is steady-stategliding, where the airspeed is computed as 9.54 m/sby simulation, the angle of attack is 15.1◦, the pitchangle of the canopy is 3.45◦, and the relative pitchangle is −4.83◦. Azuma [14] reported the aerodynamic
parameters, which were obtained by wind tunneltests and/or the United States Air Force (USAF) aero-dynamic stability characteristics estimation softwarepackage, DATCOM. In this study, however, some aero-dynamic derivative coefficients are modified throughsimulations by trial and error. Furthermore, the valuesof k, c, km, and cm, which were not considered in refer-ence [14], are adjusted through curve fitting betweenthe simulation results and the flight test data.
In the flight experiments, the right and left controllines were pulled in five patterns:
(a) collective impulsive;(b) differential impulsive;(c) collective ‘rectangular’-wave;(d) differential ‘rectangular’-wave;(e) left-line stepwise input patterns.
Simulations were performed for the five cases. Thecontrol input or brake deflection angle is defined asthe ratio of pull length of the control line to the canopychord length. The time histories of the accelerationsand angular rates for cases (a), (b), and (d) are shownin Figs 3, 4, and 5, respectively. Note that whereas thesimulation is conducted using the canopy states, theresults are converted into the payload states becausethe flight test data were measured on the payload.Although, in all cases, the time histories of the simula-tion generally showed good agreement with the timehistories of the flight tests, three remarks on the resultsare called for. First, some of the results, for example, thetime histories of the Xp-axis and Zp-axis accelerationsand the pitch rate in Fig. 4, do not seem to agree wellbetween the flight test and the simulation. However,note that the amplitude of the responses is relativelysmall, which means that the difference would be neg-ligible. Second, the time histories of the roll rate inFigs 4 and 5 contain high-frequency, small-amplitudeoscillation in the experimental data. In this model,the PPG is assumed to be rigid with respect to rolling
Fig. 3 Time responses to the collective impulsive input
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
380
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Modelling and simulation of the dynamics of a powered paraglider
Fig. 4 Time responses to the differential impulsive input
(i.e. it was assumed that there was no relative rollingbetween the canopy and the payload).The oscillations,however, indicate that small relative rolling actuallyexists, which is probably caused by the deformation ofthe canopy, including the suspension lines. For moreprecise modelling, the relative rolling could be takeninto account at the expense of a substantial increasein the complexity of the model. Third, the time histo-ries of the yaw rate also accompany high-frequency,small-amplitude oscillations due to the relative yaw-ing. Although in Fig. 4 the oscillation in the simulationresult agrees well with that in the experiment, inFig. 5 the amplitude of the oscillation in the simula-tion is somewhat larger than that in the experiment.The reason for the small amplitude in the experimentresult would be that the actuators for pulling the linewere the pilot’s arms. In this situation, the pilot mightunconsciously have applied a small force to damp thesmall oscillation, although this remains unconfirmedbecause the applied force was not measured. In all ofthe simulations, it was assumed that there was no windduring the experiment because wind data were notpresented in reference [14]. Extensive simulation ofthe effects of wind on PPG motion using the non-linearmodel was conducted in a previous study [15].
4.2 Linear dynamics analysis
The system and control matrices of the lineardynamic model are computed for the trim condition.The derivative matrices and the state-transformationmatrices are given in the Appendix 2.
The difference between the canopy-state system andthe payload-state system is illustrated by computingthe time responses for the initial relative pitch angle�θpc(0) = 0.1 rad, where other initial states are zero.Figure 6 shows the time responses of the pitch angleof the canopy, �θc. Although the same initial statesare given, the time responses of θc are very different.The reason for this is that the initial pitch angle �θc(0)
for the payload-state system is −0.1 rad, as indicatedby equation (51), whereas �θc(0) is exactly zero forthe canopy-state system, where �θp(0) = 0.1 rad. Thetime responses of the lateral-directional motion forthe initial relative yaw angle �ψpc(0) = 0.1 rad indi-cate a similar difference between the canopy-state andpayload-state systems.
Table 1 summarizes the eigenvalues of the lin-ear models of the PPG and motion modes corre-sponding to the complex conjugate pairs. Figure 7shows the time responses of the pitch rate of the
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
381
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Y Ochi and M Watanabe
Fig. 5 Time responses to the differential ‘rectangular’-wave input
Fig. 6 Time responses of the canopy pitch angle for�θpc(0) = 0.1 rad
Table 1 Eigenvalues of the linear systems (longitudinaland lateral-directional)
Motionmode Eigenvalues
Naturalfrequency(rad/s)
Dampingratio
First-order modes −1.96, −0.557 – –Relative pitching −3.36 ± 1.97i 3.89 0.863Canopy pitching −0.285 ± 0.941i 0.983 0.290First-order modes −121, −1.35, 0 – –Relative yawing −0.150 ± 5.03i 5.03 0.0297Dutch-roll −0.224 ± 0.721i 0.755 0.297
canopy computed using the payload-state model for�θpc(0) = 0.1 rad. The figure indicates that the rela-tive pitch rate has a faster, good damping mode and
Fig. 7 Time responses of the canopy pitch rate for�θpc(0) = 0.1 rad
Fig. 8 Time responses of the canopy yaw rate for�ψpc(0) = 0.1 rad
that the canopy pitch rate has a slower, more oscilla-tory mode. Therefore, the former mode correspondsto the relative pitching motion and the latter modecorresponds to the pitching motion of the canopy.
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
382
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Modelling and simulation of the dynamics of a powered paraglider
Fig. 9 Simulation results for proportional integral derivative control of powered flight
Figure 8 shows the time responses of the yaw rate ofthe canopy computed using the payload-state modelfor �ψpc(0) = 0.1 rad. It can also be seen from thefigure that the relative yaw rate has a faster, more oscil-latory mode, and that the canopy yaw rate has a slower,less oscillatory mode. The former mode correspondsto the relative yawing motion, and the latter modecorresponds to the Dutch-roll motion of the canopy.
4.3 Control of powered flight
Using the payload-state linear model, equation (54),three proportional integral derivative flight controllershave been designed for altitude control by thrust,forward-speed control by collective brake deflection,and heading-angle control by differential brake deflec-tion. The controllers are designed as what is referredto as an integral-preceded proportional derivativecontrol law based on the integral-type optimal ser-vomechanism [16] and have been applied to thenon-linear model of the PPG. The initial conditionis steady-state gliding, where the forward speed is9.22 m/s and the heading angle is 0◦.The reference out-puts are 0 m for the altitude variation, 8 m/s for the for-ward speed, and 90◦ for the heading angle. As indicatedby the initial and target outputs, this simulation con-siders the case in which the PPG changes its flight pathfrom steady-state gliding to level flight with thrust,while turning to the right by 90◦. Figure 9 shows thesimulation results (i.e. the time histories of the outputsand inputs for a calm atmospheric condition). Thealtitude variation exhibits an undershoot of approxi-mately 2.4 m, because the PPG descends initially. How-ever, altitude variation recovers to zero by increasing
thrust to achieve level flight. In addition, the forwardspeed is controlled to 8 m/s, and the heading angle ischanged by 90◦. Note that the brake deflection anglesare saturated because the neutral deflection angle iszero and the inputs cannot handle negative angles. Inthis design example, an anti-reset windup compen-sator [17] is added to alleviate integral windup dueto input saturation. The thrust converges to approxi-mately 200 N which is required to maintain level flight.
5 CONCLUSIONS
The derivation of the non-linear dynamic model,where all of the internal forces are analytically elimi-nated, is straightforward and constructive. This allowsa simulation model to be readily built and allowsa linear model to be obtained for dynamics analy-sis and control design. The validity of the non-linearmodel has been verified by the good agreementbetween the simulation results and the flight exper-iment data. The non-linear model has been linearizedand separated into the longitudinal motion and thelateral-directional motion in the same manner for as aconventional fixed-wing aircraft. The non-linear rela-tions between the canopy states and the payload stateshave also been linearized to obtain a state transfor-mation matrix between the canopy-state linear modeland the payload-state linear model, which is prefer-able for controller design because the sensors aremounted to the payload. The mode analysis and thegood simulation results for powered flight controldemonstrate the validity of the linear model as wellas the state transformation.
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
383
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Y Ochi and M Watanabe
© Authors 2011
REFERENCES
1 Azuma, A. Flight dynamics of paraglider, Lecture Note,1994 (University of Tokyo, Tokyo).
2 Li, Y. and Nahon, M. Modeling and simulation of air-ship dynamics. J. Guid. Control Dyn., 2007, 30(6), 1691–1700.
3 Slegers, N. and Costello, M. Model predictive control of aparafoil and payload system. J. Guid. Control Dyn., 2005,28(4), 816–821.
4 Doherr, K. F. and Schilling, H. Nine-degree-of-freedomsimulation of rotating parachute systems. J. Aircr., 1992,29(5), 774–781.
5 Slegers, N. and Costello, M. Aspects of control for aparafoil and payload system. J. Guid. Control Dyn., 2003,26(6), 898–905.
6 Mooij, E., Wijnands, Q. G. J., and Schat, B. 9 dofparafoil/payload simulator development and validation.In Proceedings of the AIAA Modeling and SimulationTechnologies Conference, Austin, Texas, 11–14 August2003, pp. 1–12, AIAA paper 2003-5459.
7 Yakimenko, O. A. On the development of a scalable8-DOF model for a generic parafoil-payload deliverysystem. In Proceedings of the AIAA Aerodynamic Decel-erator Systems Conference, Munich, Germany, 23–26May 2005, pp. 642–654, AIAA paper 2005-1665.
8 Hur, G.-B. and Valasek, J. System identification of pow-ered parafoil-vehicle from flight data. In Proceedingsof the AIAA Atmospheric Flight Mechanics Conference,Austin, Texas, 11–14 August 2003, pp. 1–7, AIAA paper2003-5539.
9 Muller, S., Wagner, O., and Sachs, G. A high-fidelity non-linear multibody simulation model for parafoil systems.In Proceedings of the AIAA Aerodynamic DeceleratorSystems Conference, Monterey, California, 19–22 May2003, pp. 149–158, AIAA paper 2003-2120.
10 Akasaka, T., Beppu, G., and Azuma, A. An investigationof paraglider’s turn mechanism (in Japanese). J. Jpn. Soc.Aeronaut. Space Sci., 1999, 47(540), 9–15.
11 Slegers, N. Effects of canopy-payload relative motion oncontrol of autonomous parafoils. J . Guid. Control Dyn.,2010, 33(1), 116–125.
12 Wise, K. Dynamics of a UAV with parafoil under poweredflight. In Proceedings of the AIAA Guidance, Naviga-tion, and Control Conference, Keystone, Colorado, 21–24August 2006, pp. 1–23, AIAA paper 2006-6795.
13 Redelinghuys, C. A flight simulation algorithm for aparafoil suspending an air vehicle. J. Guid. Control Dyn.,2007, 30(3), 791–803.
14 Azuma, A. Characteristics of paraglider (in Japanese),1996 (JASPA, Tokyo).
15 Watanabe, M. and Ochi, Y. Modeling and simulationof nonlinear dynamics of a powered paraglider. In Pro-ceedings of the AIAA Guidance, Navigation, and ControlConference, Honolulu, Hawaii, 18–21 August 2008, pp.1–16, AIAA paper 2008-7418.
16 Ochi, Y., Kondo, H., and Watanabe, M. Linear dynamicsand PID flight control of a powered paraglider. InProceedings of the AIAA Guidance, Navigation, and
Control Conference, Chicago, Illinois, 10–13 August 2009,pp. 1–13, AIAA paper 2009-6318.
17 Kothare, M. V., Campo, P. J., Morari, M., and Nett, C. N. Aunified framework for the study of anti-windup design.Automatica, 1994, 30(12), 1869–1883.
APPENDIX 1
Notation
AAM apparent-mass matrixA00 air mass in the canopybp distance between the jointsF cAM, F cδ aerodynamic forces on the
canopy due to apparent massand brake deflection,respectively
F iG, F iA, F iI, F iT gravity, aerodynamic, inertial,and internal forces on thecanopy (i = c) and the payload(i = p), respectively, in �c
F path amount of thrust on thepayload
F pth thrust vector on the payloadin �c
F pTpcl, F pTpdf collective (F pTRp + F pTLp) anddifferential (F pTRp − F pTLp)
internal forces, respectivelyF pTRp, F pTLp internal forces on the right and
left joints, respectively, in �p
g acceleration of gravityIn n × n identity matrixJc, Jp inertia tensors of the canopy
and the payload, respectivelyk, c spring and damper constants,
respectively, of resistance fortwist about the Zc-axis
km, cm spring and damper constants,respectively, of friction forM pdmp
mc, mp masses of the canopy andpayload, respectively
M cAM, M cδ aerodynamic moments on thecanopy due to apparent massand brake deflection,respectively
M cdmp (M pdmp) pitching moment on thecanopy (payload) due tofriction at the joints in �c (�p)
M iA, M iI, M iT aerodynamic, inertial, internalmoments in �i (i = c: canopy,i = p: payload)
TIp, TIc co-ordinate transformationmatrices from �I to �p andfrom �I to �c, respectively
V i = [ui vi wi]T linear velocity vector (i = c:canopy in �c and i = p: payloadin �p)
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
384
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Modelling and simulation of the dynamics of a powered paraglider
xc, xp state vectors for the canopyin �c and the payload in �p,respectively
x∗c, u∗ state and control vectors,
respectively, in an equilibriumcondition
0n×m n × m zero matrix
αc, αp angles of attack of the canopyand the payload, respectively
δe, δr collective (δR + δL) anddifferential (δR − δL) brakeangles, respectively
δR, δL deflection angles of the rightand left brakes, respectively
�x = x − x∗ small perturbation of x from x∗
�u = u − u∗ small perturbation of u from u∗
θpc, ψpc pitch and yaw angles,respectively, of the payloadrelative to the canopy
�i: (Xi, Yi, Zi) Cartesian co-ordinate system(i = I: inertial, i = c:canopy-fixed, and i = p:payload-fixed)
φi, θi, ψi Euler angles (i = c: �c andi = p: �p)
ωi = [pi qi ri]T angular velocity vector (i = c:canopy in �c and i = p: payloadin �p)
ωpc = [qcp rpc]T pitch and yaw angular velocityvector of the payload relative tothe canopy
APPENDIX 2
Derivative matrices
The coefficient matrices of the linear state equations,equations (39) and (40), are as follows
Aclong =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
−0.536 97 0.071 012 2.4840 −2.8799 −0.2382 0.610 35
−0.231 40 −1.5516 1.1585 −0.861 54 0.122 28 0.386 97
0.029 26 0.192 33 −0.989 36 −1.0546 0.380 30 0.669 83
0 0 1 0 0 0
0.295 54 −1.4250 2.8436 1.0502 −6.7271 −15.844
0 0 0 0 1 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
,
Bclong =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1.2966 × 10−3 −32.647
8.2210 × 10−4 −18.646
1.4230 × 10−3 5.2030
0 0
−1.2710 × 10−3 −4.8906
0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
Aclat =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
−0.192 69 2.2418 −3.2798 1.1958 −5.8945 × 10−4 −0.091 265 0
−0.019 645 −0.062 424 0.772 99 −1.1901 9.7908 × 10−4 0.078 414 0
20.311 −152.59 −122.48 2.5409 × 10−4 7.9074 × 10−3 0.643 32 0
0 1 0.060 345 0 0 0 0
−20.339 152.59 123.07 −0.481 19 −0.313 24 −26.106 0
0 0 0 0 1 0 0
0 0 1.0018 0 0 0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
,
Bclat =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
0.024 676
−0.005 988 1
529.09
0
−529.04
0
0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering JAERO888
385
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from

Y Ochi and M Watanabe
State transformation matrices
By rearranging the state variables appropriately, itis also possible to diagonalize the state transforma-tion matrix (i.e. by the same transformation from Ac
to a block-diagonal matrix of Aclong and Aclat), thematrix T in equation (53) can be transformed into ablock-diagonal matrix. Thus, the following state trans-formation matrices are obtained for the longitudinalstates and the lateral-directional states, respectively
Tlong =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
0.996 45 0.084 212 6.8278 0 0.332 00 −1.6954
−0.084 212 0.996 45 −0.548 98 0 0 9.3928
0 0 1 0 1 0
0 0 0 1 0 1
0 0 0 0 1 0
0 0 0 0 0 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
and
Tlat =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
1 −6.8498 −0.027 958 0 −0.027 958 −9.2167 00 0.996 45 0.084 212 0 0.084 212 0 00 −0.084 212 0.996 45 0 0.996 45 0 00 0 0 0.998 47 0 0.060 252 00 0 0 0 1 0 00 0 0 0 0 1 00 0 0 −0.084 236 0 0.996 74 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
which constitute the block-diagonal transformationmatrix.
Proc. IMechE Vol. 225 Part G: J. Aerospace Engineering
386
at UNIVERSITE DE SHERBROOKE on May 28, 2014pig.sagepub.comDownloaded from