Embed Size (px)
Citation preview

Modeling dynamic preferences. A Bayesian robustdynamic latent ordered probit model1
Published in Political Analysis 21(3), 2013.
Daniel [email protected]
Abstract
Much politico-economic research on individuals’ preferences is cross-sectional and doesnot model dynamic aspects of preference or attitude formation. I present a Bayesian dynamicpanel model, which facilitates analysis of repeated preferences using individual-level paneldata. My model deals with three problems. First, I explicitly include feedback from previouspreferences taking into account that available survey measures of preferences are categorical.Second, I model individuals’ initial conditions when entering the panel as resulting fromobserved and unobserved individual attributes. _ird, I capture unobserved individual prefer-ence heterogeneity, both via standard parametric random eòects, and via a robust alternativebased on Bayesian nonparametric density estimation. I use this model to analyze the impact ofincome and wealth on preferences for government intervention using the British HouseholdPanel Study from 1991–2007.
1I am indebted to JeòGill,Michael Malecki,Michael Becher, Tom Snijders, Simon Jackman,_omas Gschwend,Vera Troeger, Adam Ziegfeld, JeroenVermunt,Martyn Plummer, aswell conference and seminar participantsin Chicago, Berlin, Cologne, Oxford, and Tilburg for helpful comments and criticisms. Equal thanks is dueto my reviewers and the editors. Furthermore, I thank the Oxford Supercomputing Centre for resources andsupport.

1. INTRODUCTION
Individuals’ political and economic preferences typically exhibit patterns of both stability andchange (e.g. Wlezien 1995). On the one hand, preferences are o�en very highly correlatedover time. But, on the other hand, preferences can change in response to external events, suchas income shocks, becoming unemployed, or experiencing an economic crisis. To capturethe dynamics of preferences – their stability and their change – an appropriate modelingstrategy involves the use of individual-level panel data and dynamic panel models, in whichpast preferences in�uence current preferences via a ûrst-order Markov process. Panel data areincreasingly being used in political science, both in the form of long-term household panels,such as the British Household Panel Survey, and election panels, such as the CooperativeCampaign Analysis Project. Linear dynamic panel models are also well known in politicalscience (for an introduction seeWawro 2002 in this journal). However, the application ofthesemodels to modeling dynamic preferences is not straightforward.
_ree central issues arise when modeling preference dynamics: categorical preferencemeasures, endogenous initial observations, and individual heterogeneity. First, althoughpolitical scientists conceive of preferences as continuous, available survey data on preferencesis usually ordered-categorical, o�en using rather coarse categories. _e nonlinear nature ofpreferencemeasures prohibits direct application of established linear dynamic panel models(e.g. Arellano and Bond 1991; Blundell and Bond 1998) and instead requires a dynamicmodelfor categorical data for both the dependent variable and the feedback process. Second, becauseinitial conditions – an individuals’ preference stateswhen entering the panel – are endogenousto the preference formation process under study, one should explicitlymodel initial conditionsin nonlinear panel models (Heckman 1981b;Nerlove et al. 2008). _ird, unobserved individualheterogeneity must also bemodeled explicitly in order to capture unobserved or unmeasuredeòects of individual characteristics such asmotivation or ability. Whenmodeling heterogeneityvia Gaussian random eòects – as is standard in virtually all hierarchical models in politicalscience – inferences can be sensitive to this speciûc distributional assumption and shouldbe checked using a more �exible model speciûcation.2 Standard ûxed eòects estimationstrategies are unavailable due to the presence of a lagged dependent (endogenous) variable inthe nonlinear model (see, e.g. Nickell 1981; Heckman 1981b; Arellano and Carrasco 2003).
I present a Bayesian robust latent dynamic ordered probitmodel,which tackles these threeproblems. First, it captures the categorical nature of survey-based preferencemeasures by using
2Dynamic panel models for ordinal data are not widely developed in political science. _eoretical work andapplications exist in biostatistics,medicine, and ûnance (e.g. Lunn et al. 2001; Hasegawa 2009; Varin andCzado 2010; Czado et al. 2011; Muller and Czado 2005), but are developed with long time-series in mind, andare not concerned with initial conditions in short panels of individuals (note that the start ofmedical studieso�en does coincide with the start of the data generating process). Pang (2010) presents amodel for repeatedcategorical data using correlated residuals. However, extending themodel to include dynamic feedback is notstraightforward due to the special status of initial conditions (cf. appendix A). Pudney (2006, 2008) presentsamodel for dynamic ordinal data using Gaussian random eòects in amaximum likelihood framework.
2

an ordered probit speciûcation, in which a continuous latent preference variable generatesobserved survey responses. Most existing categorical dynamic panel models specify the laggeddependent variable as categorical, which implies the unrealistic assumption that currentcontinuous preferences are in�uenced by past categorical survey responses. In contrast, I specifyfeedback from previous preferences to current ones as also arising from latent preferences, thusappropriatelydistinguishing between continuous concept and categorical survey items. Second,I model initial conditions using a simultaneous equation speciûcation, in which individuals’initial observations depend on observed covariates, background information, such as parents’education, and unobserved individual speciûc eòects. _ird, I present robust speciûcationsfor the distribution of unobserved heterogeneity. I specify hierarchical or multilevel modelswith both Gaussian and t-distributed random eòects. To relax these parametric assumptions, IemployBayesiannonparametric density estimation for�exible estimation of the random eòectsdistribution usingDirichlet process priors (for recent applications of Bayesian nonparametricsin political science see Imai et al. 2008; Gill and Casella 2009; Grimmer 2010; Spirling andQuinn 2010).
_e paper proceeds as follows. In the next section I set up the hierarchical latent dynamicpanel model, discuss my treatment of initial conditions, the speciûcation of priors, and pos-siblemodel extensions. Next, I present robust random eòects speciûcations using Dirichletprocess priors. I illustrate themodel by an example from the political economy of redistri-bution preferences – where studies are usually cross-sectional and ignore both unobservedheterogeneity and dynamics. I analyze the impact of income and wealth on preferences forgovernment intervention using the British Household Panel Study from 1991–2007, whichrepeatedly measures individual preferences for nearly 2000 individuals. I discuss resultsarising from themodel speciûcation using standard Gaussian random eòects and illustratehow to conduct robustness tests using the �exible Dirichlet process random eòects model._e last section concludes the paper.
2. LATENT DYNAMICMODEL
A dynamic analysis of individual behavior or preferences has three features not present incross-sectional studies. First, individual preferences show a certain degree of persistence.While cross-sectional studies provide a snapshot of individuals in time,modeling the dynamicsof preferences using panel data provides an explicit model of how preferences change overtime (Bartels 1999). A straightforward theoretical speciûcation posits that preferences arepersistent, which creates correlated observations within the same individual. In other words,“[...] preferences remain unchanged unless something happens to change them [...]” (Wlezien1995: 989). _us a dynamic model of preferences should include a persistence parametercapturing this correlation.
Second, some individual characteristics, such as intelligence or motivation, can havea strong in�uence on preferences or attitudes, but are unobserved or unobservable to the
3

researcher. _is individual heterogeneity is captured via individual constants, which I specifyas random eòects (I discuss robustness of distributional assumptions in section 3). It is wellknown that if heterogeneity is present in the true data generating process but ignored in the es-timatedmodel, the degree of preference persistencewill be overestimated (seeHeckman 1981a).Conversely, ignoring persistence leads researchers to overstate the extent of heterogeneity._us, a completely speciûedmodel of dynamic preferences has to include both components.3
_ird, a sample of individuals, be it cross-sectional or a panel, provides only a time-limited observation window. Individuals started forming their beliefs and preferences along time before one starts observing them. _e fact that individuals do not enter a studywith an ‘emptymind’, i.e. the problem of initial conditions, has to be included in themodel._ose three features are important, when interpreting the eòect of shocks (such as becomingunemployed) on preferences. Estimating the eòect of such shocks from cross-sectional data,ignoring preference persistence as well as individual heterogeneity,might lead to erroneousconclusions.
2.1. Modeling dynamics
Concepts like preferences and attitudes are not inherently discrete. _e fact that oneworkswithcategorical variables is usually simply due to methodological limitations in data collection andmeasurement (McKelvey and Zavoina 1975). Consequently, preferences should be speciûedas a latent variable zt which represents the underlying continuous concept that generatesobserved categorical scores yt (e.g. Greene and Hensher 2010). Since from the conceptualperspective of preferences there is no reason to expect that current continuous preferencesdepend on past preference categories, we also need the latent variable to appear on the righthand side of our dynamic panel model (Heckman 1978; Muller and Czado 2005; Pudney 2008).In other words, feedback from past preferences to current ones, should be speciûed as arisingfrom zt−1 not yt−1.4
_us, following Albert and Chib (1993), I model observed responses in category c (c =1, . . . ,C) of observed variable yit (i = 1, . . . ,N ; t = 0, . . . , T) as being generated by an underly-ing continuous latent variable zit and a vector of threshold parameters τ such that
yit = c if zit ∈ (τc−1, τc]. (1)
3_e importance of distinguishing persistence (or state dependence) and heterogeneity has beenwell establishedin economics (e.g. Heckman 1981a; Keane 1997; Vella and Verbeek 1998; Arulampalam 2000). For recentdiscussions of its relevance to political science, seeWawro (2002) and Bartels et al. (2011).
4One ofmy reviewers rightly pointed out that other mechanisms could introduce dependence on past prefer-ences, for examplewhen individuals ‘adapt’ to repeatedly presented categories. If the objective of an analysis isto study these survey-method eòects, themodel can be extended, for example by including dummy responsecategories in addition to the latent variable (seeHeckman 1978 for a detailed discussion of continuous andcategorical lagged dependent variables).
4

To capture the ordinal nature of observed preference scores, threshold parameters are con-strained to bemonotonically increasing,
−∞ = τ0 < τ1 = 0 < τ2 < ⋅ ⋅ ⋅ < τC−1 < τC =∞; (2)
and τ1 = 0 to identify themodel (assuming that an overall constant will be included in themodel; see Albert and Chib 1993; Johnson and Albert 1999).
Now, the dynamicmodel for latent preferences zit can be written as:
zit = ϕzit−1 + β′xit + ξi + єit , t = 1, . . . , T (3)
where ϕ captures the degree of preference persistence, i.e. the extent to which current pref-erences depend on previous ones. β is a vector of regression parameters for matrix xit ofpossibly time-varying covariates and an overall constant. Errors are decomposed into anindividual-speciûc time constant random eòect ξi and stochastic disturbances єit , which varyover individuals and survey waves. For identiûcation, the variance of the stochastic errors,distributed єit ∼ N(0, σ 2
є ) has to be ûxed. I set σ 2є = 1, yielding an ordered probit speciûcation.5
Unobserved individual heterogeneity is modeled via random eòects, which are drawnfrom a normal distribution centered at zero with estimated variance σ 2
ξ :
ξi ∼ N(0, σ 2ξ). (4)
_emodel can be seen as amultilevel or hierarchical model, with responses nested withinindividuals. _e presence of random eòects induces correlations between responses of thesame individual over time (Rabe-Hesketh and Skrondal 2008).6 _e proportion of totalvariance that is due to individual random eòects, a�er accounting for preference persistence,can be estimated by
ρ =σ 2ξ
(1 + σ 2ξ)
. (5)
_is provides a useful indicator of the relevance of unobserved individual diòerences, ignoredin cross sectional analyses.
5As usual, errors are assumed independent, Cov(є i s , є i t) = 0∀s ≠ t, and uncorrelated with covariates,Cov(є i t , x i t) = 0.
6I employ standard assumptions of normal random eòects, i.e. they are assumed to be independent of stochasticerrors: Cov(ξ i , є i t) = 0, and independent of x i t : Cov(ξ i , x i t) = 0. _e latter assumption is principallyunveriûable. _us Pudney (2008) suggests to regard this as a normalization and interpret eòects of covariatesx∗i (those covariates in x i t which are time-constant) as combination of the true eòect of x∗i and the part ofthe random eòect ξ i that can be proxied by a linear function of x∗i . _e estimated random eòects varianceσ 2ξ is then interpreted as variation not predicted by x∗i . Alternatively, themodel might be extended to allowfor correlated random eòects (Mundlak 1978; Wooldridge 2002).
5

2.2. Modeling initial observations
_e previous discussion indicates that one generally assumes preference or attitude formationto be a continuous ongoing process. However, panel data provide only a limited window intothis process. Clearly, the ûrst panel observation of an individual does not coincide with theûrst time he or she has ever formed a preference. To the contrary,most researchers wouldargue that individuals start forming preferences at a very young age, and are in�uenced byparental characteristics, such as education, and by both observed and unobserved individ-ual characteristics.7 _us, modeling initial observations has special relevance in a (short)dynamic panel model, as one’s “assumption about the initial observations plays a crucial rolein interpreting themodel” (Anderson andHsiao 1981: 598).8
Nerlove et al. (2008: 11-12) argue that initial observations should bemodeled by a speciû-cation similar to the one aòecting the remaining observations – i.e., as depending on observedindividual characteristics in xi , while possibly including additional background variables vi ,such as parental education or the region of upbringing. Furthermore, to capture the depen-dence of the initial observation on unobserved individual characteristics, one should specifyan arbitrary correlation with the individual speciûc eòect ξi (Nerlove et al. 2008; Harris et al.2008). In specifying an explicit model for endogenous initial observations, I follow Heckman(1981a, b), who speciûes an approximation for the ûst (latent) observation zi0∣xit , ξi as:
zi0 = δ′wi + λξi + єi0 (6)
where wi = (xi0, vi) is a vector of initial observation covariates comprised of an individual’scovariate values at sample entry xi0 and additional background information vi . As notedabove, initial observations are already shaped by unobserved individual characteristics, whichHeckman’s speciûcation captures by including the individual speciûc eòect ξi with a scalefactor λ that allows for a diòerent eòect magnitude of unobserved characteristics on initialpreferences.9 Finally, єi0 is a random disturbance term at the initial condition assumeduncorrelated with other errors, i.e. Cov(єi0, єit) = 0, ∀t > 0. Monte Carlo evidence indicates
7Models which ignore this problem and specify initial conditions as exogenous can lead to severely biasedestimates of themost central parameters of a dynamic panel model, namely individual random eòects andpreference persistence (e.g. Heckman 1981b; Fotouhi 2005; Arulampalam and Stewart 2009).
8AsAnderson andHsiao (1981: 598) note, this is a problem speciûc the short dynamic panels (such as householdor election panels), since on cannot credible assume that T →∞.
9It facilitates a simple speciûcation test of the appropriateness of assuming independence of initial conditionsand unobserved individual eòects: this assumption is rejected if λ ≠ 0. _is parametrization is sometimescalled a factor-analytic formulation of random eòects (e.g Skrondal and Rabe-Hesketh 2004). Alternatively,one could introduce a second set of random eòects with ûxed variance in (6), and estimate the covariancebetween them and those in equation (3). _e present formulation is somewhat more intuitive and allows foramore straightforward test of exogeneity by testing the parameter λ instead of a covariance.
6

that this approximationworkswell in short panels (Heckman 1981a;Akay 2011).10 A somewhatmore detailed discussion can be found in [online] appendix A.
Jointly estimating (1) – (4) and (6) yields amodel that deals with four of the ûve centralproblems outlined in the introduction. _e dynamic model is supposed to capture serialcorrelation of responses given at diòerent points in time by the same individual (e.g. Beck andKatz 1996). An estimate of this correlation is given by ρ deûned in equation (5). To test forremaining autocorrelation, latent residuals (Albert and Chib 1995) can be used. I calculateremaining residual correlation as:
r = ∑Ni=1∑T
t=2 µitµit−1
∑Ni=1∑T
t=2 µ2it
(7)
where µit stands for the linear predictor used in (3). If the speciûcation succeeds in modelingindividuals’ correlated responses over time, r should be close to zero.
2.3. Prior speciûcations
Model speciûcation is completed by assigning (hyper-) priors to all parameters.11 Priors forintercept and parameters of individual characteristics, in both dynamics and initial conditionequations are diòuse with mean zero and large variance to yield regression-type estimates:
β, δ ∼ N(0, 100). (8)
I use a normal distributed prior for ϕ, the parameter capturing persistence of preferences.I set a prior mean of 0.5 indicating an a priori expectation that persistence is not zero, but usea very large variance to yield a diòuse prior:
ϕ ∼ N(0.5, 100). (9)
More informative priors might be preferable in some applications, e.g. by restricting ϕ usingan uniform prior on U(−1, 1, ).
My hyperprior for the variance of individual random eòects is uniform on the standard
10Alternative approximations, such asWooldridge (2005),would specify the distribution of ξ i ∣y i0 , x i t , i.e. simplyinclude the ûrst panel observation among the regressors. _is approximation is computationally easier toimplement than Heckman’s solution, which explains its predominance in applied research. However, ifone speciûes preferences as latent constructs, the variable one would need for conditioning on (z i0) is notobservable (Pudney 2006: 8). As another disadvantage, this approximation usually works less well in shortpanels (Akay 2011).
11Note that, as in every Bayesian analysis, sensitivity analyses for values of the hyperparameters should becarried out. For an overview of robustness check strategies see Gill (2008a: 199f.). Basic regression-typepriors can be checked by using diòerent variances, For more speciûc or complex priors, I describe sensitivitycheck strategies in the text.
7

deviation, bounded between zero and 10. Gelman (2006) recommends this prior over themore commonly used inverse Gamma speciûcation (Spiegelhalter et al. 1997).
√σ 2ξ ∼ U(0, 10). (10)
However, this prior has the disadvantage of assigning equal probability to unrealistically largerandom eòect variances. While this can be seen as representing very little a-priori knowledge,some researchers might prefer amore informed speciûcation using inverse gamma priors
σ−2ξ ∼ Γ(a0, b0) (11)
with values for a0 and b0 chosen using knowledge or expectations of the variation of theindividual speciûc eòects. I provide examples of such an analysis in [online] appendix D.
An uninformative prior for the random eòect scale-factor in the initial condition equation(6) is a normal distribution centered at zero and with large variance:
λ ∼ N(0, 100). (12)
To ensure that thresholds follow themonotonicity constraint given in (2), I specify thresh-olds recursively ensuring that each subsequent threshold is larger than the previous one byadding a positive value υτ. _is is achieved by drawing υτ from a distribution with positivesupport such as an exponential distribution (cf. Jackman 2009).12 _e ûrst threshold is nor-malized to zero for identiûcation; in amodel without overall intercept it can be drawn from anormal distribution centered at zero with large variance.
τ1 = 0 (13)τc = τc−1 + υτ , c = 2, . . . ,C − 1 (14)υτ ∼ Exp(1). (15)
2.4. Model extensions
Given its hierarchical nature, themodel can be extended straightforwardly to capture higherorder nesting by adding random eòects for the relevant grouping factor. For example, individ-uals nested within families (e.g.Winkelmann 2005) or regions j ( j = 1, . . . , J) can bemodeledby extending (3) to
zi jt = ϕzi jt−1 + β′xi jt + ξi + ψ j + єi jt
12Here I use an exponential distribution with rate one, but other parametrization are possible depending onone’s a priori expected distance between thresholds. My speciûcation expects a distance of one, which isclose to the diòerence observed in a simple ordered probit regression. An alternative strategy for an orderingconstraint is to order thresholds at each step of theMCMC sampler.
8

where ξi is the individual speciûc eòect, and ψ j represents the regional random eòect. Initialconditions are still modeled via (6). _is is now a three level model with responses nested inindividuals nested in regions. Region random eòects are distributed ψ j ∼ N(0, σ 2
ψ) with anappropriate hyperprior such as σψ ∼ U(0, c).
3. ROBUST RANDOM EFFECTS
_e discussion in the previous section assumed normally distributed random eòects. _isassumption goes almost unnoticed as it is standard in the vast majority of random eòectsor ‘multilevel’ models in the social sciences. However, assumptions about the distributionof individual random eòects ξi are not innocuous and can have important substantive impli-cations for panel data analysis.13 When using a normal distribution as random eòects prior,the well-known shrinkage property of hierarchical models (Gill 2008a: 183; Robert 2007:ch.10) pulls individuals with extreme ξi values towards one common mean. Multi-modality orinteresting patterns of random eòects might be obscured. Checks of the normality assumptioncan not be carried out using the already shrunken residuals (Kyung et al. 2010).
In this section I describe two strategies for amore robust estimation of individual het-erogeneity: (1) accommodating more extreme individual random eòects by specifying adistribution with heavier tails, such as a t-distribution with small degrees of freedom (Langeet al. 1989); (2) estimating the random eòects distribution nonparametrically using Dirichletprocess priors (e.g. Gill and Casella 2009).
3.1. t-distributed random eòects
As an alternative to the normal distribution, a t distribution can be used as robust priorfor random eòects. A t distribution with small degrees of freedom has heavier tails andaccommodates more extreme random eòect values (cf. Lange et al. 1989; Gelman et al. 2004:ch.17). _us, changing the distributional speciûcation in (4) to
ξi ∼ t(0, σ 2ξ , df) (16)
yields amodel with t-distributed random eòects. However, estimating the degrees of freedomfrom the data – e.g. by assigning a uniform prior – is o�en rather diõcult. For my goal ofchecking the robustness of the normal random eòects assumption, choosing a small value,such as 4 degrees of freedom, is more appropriate (Gelman et al. 2004: 446).
13For a similar argument in the context ofmarketing models see Rossi et al. (2005: ch. 5); see Navarro et al.(2006) for experimental psychology.
9

3.2. Dirichlet process random eòects
Amore �exible alternative to assuming normally distributed random eòects consists in estimat-ing the random eòects distribution non- or semi-parametrically. In the simpler linear dynamicpanel case, a ûxed eòects approach can be employed without distributional assumptions –however this is unavailable for the current model (e.g. Nickell 1981; Heckman 1981b). _us,when random eòects have to be used, Arellano and Carrasco (2003) argue that (p. 126) “asemi-parametric random eòects speciûcation may represent a useful compromise” betweenthe two.
In a frequentist framework, nonparametric estimation can be accomplished by using ûnitemixtures of normals or by approximating the random eòects distribution by a ûnite numberofmass points (e.g. Heckman and Singer 1984; Lindsay 1995;Aitkin 1999; Eckstein andWolpin1999; Vermunt 2004). When applied to substantive research questions, a central problemconsists in how to choose the number ofmixtures or mass points (Laird 1978; Follmann andLambert 1989; Vermunt et al. 2008; Skrondal and Rabe-Hesketh 2004: 181f.).
In a fully Bayesian analysis, instead of assuming a distribution G for the random eòects,one can place a Dirichlet process prior (Ferguson 1973, 1974) on G itself to indicate uncertaintyabout its shape (e.g. Kleinman and Ibrahim 1998; Gill and Casella 2009):
ξi ∼ G (17)G ∼ DP(α,G0) (18)
A Dirichlet process is characterized by two components. _e base distribution G0 is theexpectation of G – the distribution one would have used in a non-DP model (Escobar 1995:98). In my current application this is the zero-centered normal distribution with estimatedvariance. _e precision or dispersion parameter α determines the dispersion of the priorfor G over its mean G0 (Muller and Quintana 2004). _us, using a Dirichlet process prior,each set of individual random eòects {ξ1, . . . , ξN} drawn from G lies in a set of K distinctvalues or ‘subclusters’ (with K ≤ N) sampled from G0: {ζ1, . . . , ζK}.14 For each number ofrealized subclusters at any particular step of an MCMC sampler, random eòects ξi are drawnfrom the set {ζ1, . . . , ζK} viamultinomial sampling. Deûne subcluster membership indicatorsS = {s1, . . . , sN} which are si = k if ξi = ζk; and mk = #{si = k} as the number of randomeòects which share the same value ζk (i.e. they belong to the same subcluster k).15
To illustrate the working of the Dirichlet process, I describe the assignment of ran-dom eòect ξi of a particular individual to a subcluster k, conditional on all remaining ran-
14_e term “subcluster” is used to indicate that clustering is done nonparametrically and not based on substantivecriteria (cf. Kyung et al. 2010)
15_us, using a Dirichlet process prior provides discrete realizations from the inûnite space of prior distributionswith probability one (Ghosh andRamamoorthi 2003;Muller andQuintana 2004). Amore detailed discussioncan be found in [online] appendix B.
10

dom eòects ξ[i] = {ξ1, . . . , ξi−1, ξi+1, . . . , ξN} being already assigned. Denote by S[i] the spe-ciûc conûguration of N − 1 random eòects into K[i] subclusters existing at this point, withm[i],k = #{si = k, k ≠ i} giving the number of individuals sharing a common value ζ[i],k . _econditional prior for ξi is (seeHanson et al. 2005 or Dunson et al. 2007 for details):
[ξi ∣ξ[i],K[i], S[i], α] ∼α
α + N − 1G0 +
1α + N − 1∑k≠i
δ(ξk) (19)
∼ αα + N − 1
G0 +1
α + N − 1
K[i]
∑k=1
m[i],kδ(ζ[i],k) (20)
where δ(⋅) now represents the Dirac delta function yielding a single value at its argument.In other words, ξi forms a new subcluster with probability α/α + N − 1, in which case it isdrawn from G0. Else, it gets value ζ[i],k of an existing subcluster with multinomial probabilityaccording to N[i],k/α + N − 1. If one imagines a stream of individual random eòects tobe assigned, this leads to a preferential attachment clustering structure: as the number ofindividuals grows, the probability that a new individual is assigned to an already existingsubcluster is proportional to the subcluster’s size. _e probability that a new individual formsa new subcluster of the Dirichlet Process is proportional to α, and if that happens, values forξi are generated according to the base distribution G0 (Muller et al. 2007).
_e realized numbers of subclusters K is stochastic and is governed by α, which can beitself estimated from the data (see below). _e role of α can be visualized by inspecting itsrelationship with the expected number of subclusters (Hanson et al. 2005), which can beapproximated as (Antoniak 1974; Escobar 1995):
E(k∣α, n) ≈ α log[(α + N)/α]. (21)
Figure 1 plots the expected number of subclusters as a function of the number of individualsfor diòerent values of α. _is nicely illustrates the logarithmic nature of the preferentialattachment property of the Dirichlet process and conforms to intuitions about the relationshipbetween the number of diòerent subclusters and the number of individuals: As more andmore individuals are observed, the chance of observing new and unexpected random eòectvalues increases, but at a decreasing rate.
In the dynamic panel model with random eòects, considered here, the set of parametersin the base distribution is simply G0 = {p(σ 2
ξ)} with a uniform hyperprior σξ ∼ U(0, 10) asbefore. _us themarginal distribution – averaging over all possible G – yields amixture ofnormal distributions with the number of subclusters K randomly varying between 1 and N(see Kleinman and Ibrahim 1998 for a similar setup).16 _e individual speciûc random eòectvariance parameters are either selected from the K[i] existing values ζk = σ 2
ξ,k drawn from G0,
16In practical implementations using a Truncated Dirichlet process, the number of subclusters is restricted tosome truncation value T ≪ N . See appendix B for details.
11

E(k)≈α
log((n+α)α)
Number of individuals0 500 1000 1500
0
5
10
15
α = 0.1
α = 0.5
α = 1
α = 2
Figure 1: Expected number of subclusters as function of sample size and Dirichlet processprecision parameter α
or created via a fresh draw from G0. Amore detailed technical discussion of the Dirichletprocess and its implementation is available in [online] appendix B.
Estimating dispersion parameter α from the data
_e dispersion parameter, α, is a central parameter of themodel. Higher values of α increasenot only the number of expected subclusters, but also the ratewithwhich new ones are createdby the Dirichlet Process. Given the absence of clear prior expectations about values of α, itsvalue can be determined by the data yielding amixture of Dirichlet processes (Antoniak 1974).In a fully Bayesian context this is achieved by assigning it a hyperprior:
α ∼ Γ(a0, b0). (22)
_e gamma distribution is a common choice for this problem (Escobar andWest 1998; Jaraet al. 2007), however its parameters do not allow for an intuitive prediction of its eòect on themodel.17 Kottas et al. (2005) provide an approximation to the relationship between Γ-priorparameters and expectation and variance of the number of subclusters K, which can be usedto choose semi-informed prior values (for more details see appendix C). I select parametersfor the gamma hyperprior so that they yield 8 a priori expected clusters with a standarddeviation of 4, which yields parameters a0 = 5.16 and b0 = 4.54 for the gamma prior. To
17Specifying an essentially �at prior for computational reasons is common in political science applications(Jackman 2000; but see Jackman andWestern 1994), but is of somewhat questionable value here. Evenmedium-sized values of α lead to a large number of clusters, which in the limiting case creates one clusterper individual – essentially defying the purpose of the hierarchical setup. _erefore, I argue to use a semi-informed prior speciûcation (Gill and Casella 2009: 3) for the DP precision parameter. Kyung et al. (2010)provide alternative strategies of sampling the concentration parameter.
12

check the sensitivity of this speciûcation, I also used values which lead to a prior expectationof half the number of clusters (a0 = 0.921 and b0 = 1.435). In an alternative strategy (androbustness test), one can forgo estimation of α and instead ûx it to a set of pre-speciûed values,e.g. α = {0.5, 1, 2, 10}, in order to determine the robustness of one’s estimates to increasinglylarger numbers of random eòects subclusters. _e approximations given in equation (21) andFigure 1 can serve as guidelines relating values of α to expected subclustering and one’s samplesize.
4. APPLICATION: DYNAMIC PREFERENCES FOR REDISTRIBUTION
A recent wave of research in (comparative) political economy has augmented macro-levelstudies of redistribution by concentrating on individual-level factors in�uencing redistribu-tion preferences (see, among many,Moene andWallerstein 2001; Iversen and Soskice 2001;Alesina and La Ferrara 2005; Alesina and Angeletos 2005; Cusack et al. 2005; Scheve andStasavage 2006; Shayo 2009; Rehm 2011; Rehm et al. 2012). Studies examining preferences forredistribution and government intervention in the economy are usually cross-sectional andignore dynamic aspects of preference formation.18 As a consequence, estimates of key variables,such as the eòect of job loss (as in Cusack et al. 2008) might be in�uenced by unobservedfactors, such as ability andmotivation, as well as by persistent preferences.19
In this section, I present a short study of the dynamics of individual redistribution pref-erences, by applying the model outlined before to repeated measurements of individuals’preferred level of government intervention. More speciûcally, I examine individual responsesto the question if government has the obligation to provide jobs. _is survey item correlateshighly with other widely usedmeasure of general redistribution preferences.20 I examine theeòects of income and wealth and of ‘socio-economic shocks’ such as becoming unemployedor getting divorced. For a recent summary of the theoretical relevance of these factors seeAlesina and Giuliano (2011).
4.1. Data and variables
I use data from the British Household Panel Survey, conducted between 1991 and 2008, whichprovides measurements ofmy dependent variable on 7 occasions. I use the original (‘Essex’)sample and create a balanced panel using individuals who provide responses to all sevenwaves.21 _is provides me with data on 1958 individuals observed over a span of 17 years.
18But see recent research based on experimental evidence, e.g. Margalit (2011), Neustadt (2010).19_is should not be read as a critique of this particular paper, given that the authors’ interest lies in a comparativeanalysis (where panel data is unavailable).
20Its correlation with a latent preferencemeasure of several redistribution items (following themethodology ofStegmueller 2011) using data for the UK from the International Social Survey Programme is 0.64.
21Items are available in waves A, C, E, G, J, N, and Q. Estimating the model using multiple imputation formissing values provides results that are substantively similar to the ones presented here, as does an analysis
13

Responses to the item “It is the government’s responsibility to provide a job for everyone whowants one” are captured using the usual 5 point strongly agree – strongly disagree scale.22
Since both extreme ends of the response categories are rather sparsely populated, I combinecategories to yield a clear three-category response vector, which indicates if preferred levelsgovernment activity should stay the same (0), or should be increased (1) or decreased (−1).23_us, the relationship between observed responses and the latent preference variable is givenby:
yit =⎧⎪⎪⎨⎪⎪⎩
−1 if zit < τ1 = 00 if τ1 = 0 < zit < τ21 if τ2 < zit .
Income is captured by both household income, and the share of a respondent’s incomeof total household income. I measure income as real equivalent household income, i.e., it isde�ated using the consumer price index with base year 2005 and adjusted for household sizeusing themodiûedOECD equivalence scale (Hagenaars et al. 1994). I decompose income intoa time varying and a time constant part. _us, I estimate both a level and a shock eòect, whichmirrors the theoretical idea of permanent and transient income components (Friedman 1957).More precisely, observed incomewit is decomposed aswit = wi +(wit − wi)with appropriatelyspeciûed regression weights for both terms. Household wealth is captured by the estimatedvalue of a respondent’s house. Deûnitions and descriptive statistics of all other independentvariables used in the analysis can be found in Table 1. Following Gelman (2008), in all modelsestimated below I centered and scaled all continuous variables by dividing by two standarddeviations (which makes them roughly comparable to binary covariates).
4.2. Results
First, I describe results obtained from estimating themodel described in section 2 assumingnormally distributed random eòects. I use a 66% subsample of individuals from the fullsample. Results are obtained by MCMC sampling using two chains run for 500,000 iterationsthinned by a factor of 25. 200,000 previous iterations are discarded as burn-in. _emodel isimplemented using JAGS (version 3.1.0) with a truncation threshold of 20 (see the discussionof the Truncated Dirichlet Process in appendix B).24 Diagnostics suggested by Brooks andRoberts (1998) and Gelman and Rubin (1992) do not show signs of absence of ‘convergence’.25
which uses an unbalanced panel of respondents who participated in at least three waves.22Categories are labeled strongly agree; agree; neither agree nor disagree; disagree; strongly disagree.23Note that in single index models, such as this one, consistency of the estimates is not hampered by combiningcategories. See Franses and Cramer (2010) for a further discussion on combining categories in orderedresponsemodels. Furthermore, this dependent variable clearly represents a situation where linear modelsare not appropriate.
24A second run with a truncation value of 40 yields a maximum posterior sampled value for K of 17, whichindicates that a truncation level of T = 20 was appropriate (see [online] appendix B).
25_e posterior samples converge early, but I ran the sampler for longer, providing more draws for the thresholdsin order to avoid non-convergence in this part of themodel (cf. Gill 2008b). I conducted an “insurance run”
14

Table 1:Descriptive statistics of independent variables
Name Description mean sd
Income Equivalent household income (in 10,000 £)Permanent Permanent income component 4.590 2.390Transitory Transitory income component 0.000 2.558
Income share R’s share of total HH income 0.532 0.300House value Estimated house value (in 100,000 £) 1.181 1.397Owner House owned outright or with mortgage 0.819 0.385Unemployed Unemployed 0.033 0.178Union member Union member 0.231 0.421Divorced Divorced 0.059 0.235HH size Size ofHousehold 3.202 1.272N kids Number of kids in HH 0.906 1.084Female Gender: female 0.511 0.500Age Age in years 3.963 0.960Nonwhite† Ethnic group non-white 0.032 0.175Educationb,†
Degree University degree 0.199 0.399A-levels A level or higher national diploma 0.193 0.394O-levels O level or GCSE 0.411 0.492
London† R grew up in greater London area 0.100 0.300Parents’ jobsc,† Parents’ job status
unskilled Blue collar, unskilled jobs 0.163 0.369skilled Blue collar, skilled jobs 0.223 0.416white-collar White collar 0.145 0.352self-employed Self-employed 0.144 0.351
N rows 13706N individuals 1958† Variables are time constanta Equivalized using OECD scale; de�ated using consumer price index, 2005 pricesb Reference category: no or primary educationc Reference category: Managers, Salariat; dominance coding
15

Resulting estimates are shown in Table 2, where I provide posterior means and standarddeviations as well as 95% highest posterior density regions. Concentrating on central dynamicparameters, I ûnd a signiûcant amount of preference persistence: ϕ is estimated as 0.23 with asmall posterior standard deviation. An estimated random eòect variance, σ 2
ξ , of 0.83±0.09underscores the importance of controlling for unobserved individual heterogeneity. _eproportion of the total variance that is due to unobserved individual factors, ρ, is estimated as45±3%. _us, almost half of the diòerence in preferences between individuals is due to unob-served factors such as ability or motivation (which remains hidden in cross-sectional studies).Clearly,more research is needed to capture such unobserved individual characteristics.
As described in section 2, a speciûcation test for the independence of initial conditions andunobserved individual eòects is obtained by testing if λ is equal to zero. _is is clearly rejectedby an estimate of 1.19 and a HPD region far away from zero. In other words, initial conditionsshould bemodeled as endogenous to individual (observed an unobserved) characteristics.Relevant covariates in the initial conditions equation are age, income, and notably education,aswell as pre-sample information on parental background. For example, individualswho grewup in a working class household already have substantively higher preferences for governmentintervention at the start of the panel.
(Gill 2008b: 173): running the sampler for twice as many iterations. Estimates for all key model parametersare virtually identical; with the largest diòerence being 0.0019. All code and diagnostics are available in theauthor’s dataverse.
16

Table2:P
osterior
sum
maryfo
rHiera
rchica
ldynam
iclatent
orde
redpr
obitm
odel.
Initialco
nditi
ons
Mea
nSD
95%
HPD
Dynam
ics
Mea
nSD
95%
HPD
δ 1[Per
manen
tinc
ome]
−0.42
20.13
2−0.67
9−0.16
2β 1
[Per
manen
tinc
ome]
−0.40
40.07
1−0.54
6−0.26
7δ 2
[Tra
nsito
ryinco
me]
−0.03
30.12
2−0.27
30.20
2β 2
[Tra
nsito
ryinco
me]
−0.05
90.038
−0.13
30.018
δ 3[R
’sInco
meshare]
−0.01
50.10
7−0.22
50.19
4β 3
[R’sInco
meshare]
−0.11
30.05
1−0.21
4−0.01
6δ 4
[Hou
seva
lue]
−0.21
90.228
−0.65
60.23
4β 4
[Hou
seva
lue]
−0.11
50.05
2−0.220
−0.01
6δ 5
[Hou
seow
ner]
−0.07
30.10
2−0.26
70.13
3β 5
[Hou
seow
ner]
−0.02
60.04
7−0.11
70.06
7δ 6
[HH
size]
0.22
90.18
5−0.14
30.57
9β 6
[HH
size]
0.08
50.07
9−0.07
20.23
7δ 7
[Nkids
inHH]
−0.04
70.168
−0.38
10.278
β 7[N
kids
inHH]
−0.02
10.06
5−0.15
10.10
5δ 8
[Uni
onmembe
r]0.15
50.100
−0.04
50.34
9β 8
[Uni
onmembe
r]0.148
0.04
90.05
40.24
4δ 9
[Age]
−0.55
10.11
5−0.77
9−0.32
6β 9
[Age]
−0.31
40.05
6−0.42
4−0.20
2δ 1
0[Female]
0.27
10.090
0.09
40.44
6β 1
0[Female]
0.23
50.06
40.11
20.360
δ 11
[Divorced]
0.12
40.23
7−0.340
0.58
9β 1
1[D
ivorced]
0.058
0.08
7−0.11
10.22
5δ 1
2[U
nem
ployed]
−0.398
0.21
6−0.81
50.030
β 12
[Une
mployed]
0.140
0.100
−0.05
50.33
4δ 1
3[N
on-w
hite]
0.31
70.28
2−0.23
10.87
1β 1
3[N
on-w
hite]
0.60
60.17
10.27
20.94
1δ 1
4[Deg
ree]
−0.52
40.17
5−0.86
6−0.18
1β 1
4[Deg
ree]
−0.66
90.10
5−0.87
9−0.46
9δ 1
5[A
-leve
ls]−0.52
10.16
9−0.84
9−0.18
5β 1
5[A
-leve
ls]−0.46
50.10
2−0.67
1−0.26
9δ 1
6[O
-leve
ls]−0.43
10.14
3−0.71
2−0.15
5β 1
6[O
-leve
ls]−0.32
10.08
5−0.49
3−0.158
δ 17
[Paren
ts:u
nskilled]
0.46
40.138
0.18
90.73
2β 0
[Interce
pt]
0.21
30.04
30.13
10.29
9δ 18
[Paren
ts:s
killed]
0.23
30.11
70.00
40.46
2τ 2
0.818
0.01
90.78
10.85
5δ 1
9[Paren
ts:w
hite-collar]
0.29
90.12
50.05
50.54
4ϕ
0.22
60.02
60.17
60.27
7δ 2
0[Paren
ts:self-em
pl.]
0.11
50.130
−0.13
70.37
3σ2 ξ
0.82
90.09
20.65
41.01
3δ 2
1[L
ondo
n]0.04
70.13
9−0.220
0.32
6r
−0.00
90.01
2−0.03
10.01
5λ
1.18
50.098
0.99
51.37
9ρ
0.45
20.02
70.398
0.50
6
Dev
iance
2570
5DIC
2625
9Po
ster
iorp
redictivep-va
lue
0.528
Note:Ba
sedon
20.000
MCMCdraw
s._
resh
old
τ 1ûxedat0.Ba
lanced
pane
l,90
44rows,
1292
individuals.
Poster
iorpred
ictivechec
kca
lculatedfo
rmea
nnu
mbe
rofp
referencechan
ges.
17

In a dynamic panel model a central quantity of interest are long-run or steady-staterelationships between z and x taking preference persistence into account. Since I ûxed thescale of the error variance to 1, steady-state eòects are calculated as β/(1 − ϕ). Using 5000draws from the relevant parameters’ posterior distributions, I calculate posterior means andstandard deviations of steady-state eòects, displayed in Table 3. For easier interpretation, Iprovide them both in the metric of the latent dependent variable z, and calculated as ûrstdiòerences in predicted probabilities of preferring more government intervention resultingfrom a unit-change in a covariate. For discrete variables this re�ects a change from 0 to 1; forcontinuous variables this represents a change of 2 standard deviations (cf. Gelman 2008).
Long-run estimates of wealth captured by permanent income and house value showa strong and negative relationship with preferences for government intervention. All elseequal, a unit-change of permanent income reduces an individual’s probability to opt for moregovernment intervention by 17±3 percentage points. It is noteworthy that income shockshave little eòect on preferences and are statistically indistinguishable from zero. I ûnd thesame for the estimated long-run eòect of becoming unemployed, which is large but has aposterior density that includes zero. _is also holds for its parameter estimates displayed inTable 2. Excluding all income eòects from themodel does not change this ûnding. _is pointsto the relevance of including preference persistence and (especially) unobserved individualheterogeneity in studies of individual preferences. It is this speciûcation of unobservedheterogeneity which I turn to next.
4.3. Robust random eòects results
To check the robustness ofmy random eòects speciûcation, I re-estimatedmymodel usingthe strategies outlined in section 3. Amodel with t-distributed random eòects with 4 degreesof freedom produces a lower estimate of the random eòects variance, σ 2
ξ , of 0.77 with a 95%HPD region ranging from 0.68 to 0.86. However, all other model parameters, including thepreference persistence parameter ϕ, are estimated at virtually the same values (at 2 sf.). Whenusing a more �exible density estimate of the random eòects distribution using a Dirichletprocess prior,more diòerences emerge.26
Figure 2 plots a kernel density estimate of the distribution of random eòect estimates (moreprecisely their posterior expectation) from the Dirichlet process hierarchical model. Clearlythe distribution of random eòects diòers from the traditionally made normal assumption,being slightly skewed andmore peaked. However, there is no clear evidence ofmulti-modalityor the existence of extreme random eòects in the tails of the distribution. _is suggest thatcentral model parameters might not be too strongly aòected by diòerences in random eòectestimates.
To illustrate diòerences in parameter estimates that emerge when using diòerent random
26A full table of parameter estimates for the DP prior model is given in appendix E.
18

Table 3: Steady-state eòects. Calculated on the scale ofthe latent variable z and as predicted probability of re-sponding in the highest category. Posterior means andstandard deviations.
z-metric P(yi = 1)
Mean SD Mean SD
Permanent income −0.521 0.093 −0.172 0.031Transitory income −0.076 0.050 −0.025 0.016R’s Income share −0.146 0.066 −0.049 0.022House value −0.149 0.068 −0.049 0.022House owner −0.034 0.060 −0.014 0.026Household size 0.110 0.103 0.036 0.034N kids in HH −0.027 0.085 −0.009 0.028Union member 0.192 0.064 0.065 0.022Age −0.406 0.074 −0.134 0.024Female 0.304 0.083 0.100 0.027Divorced 0.074 0.111 0.027 0.039Unemployed 0.178 0.131 0.064 0.046Non-white 0.785 0.221 0.294 0.085Degree −0.866 0.138 −0.233 0.030A-levels −0.601 0.134 −0.174 0.034O-levels −0.416 0.111 −0.134 0.035
Note: Calculated using 5000 simulated values. Predicted probabili-ties represent unit-change in variable holding all else constant.
−4 −2 0 2 4
Posterior means of random effects
0.0
0.1
0.2
0.3
0.4
0.5
Den
sity
Figure 2:Distribution of random eòects using a Dirichlet process prior. Density estimate ofposterior means of random eòects ξi evaluated over grid of 200 points. Normal distribution (-- -) shown for comparison.
19

0.8 1.0 1.2 1.4 1.6
λ0.15 0.20 0.25 0.30
φ
−0.6 −0.5 −0.4 −0.3 −0.2 −0.1
β9
0.0 0.1 0.2 0.3 0.4 0.5
β10
Normal distributedt−distributed, df=4Mixture of dirichlet process
Figure 3: Consequences of diòerent random eòect prior speciûcations. Posterior distributionsof selected parameters obtained using a normal distribution; a t distribution with 4 df.; andmixture of Dirichlet processes as prior.
20

Table 4: Steady state estimates from Dirichlet random eòects model. Panel (A) shows esti-mated steady state eòects. Panel (B) shows diòerence to normal random eòects model. Pos-terior means and standard deviations.
(A) Estimates (B) Diòerence to normal RE
z-metric P(yi = 1) z-metric P(yi = 1)
Permanent inc. −0.516 0.088 −0.187 0.031 0.005 0.130† −0.015 0.043†
Transitory inc. −0.081 0.051 −0.030 0.019 −0.006 0.071† −0.004 0.025†
Income share −0.137 0.065 −0.050 0.024 0.007 0.091† −0.002 0.033†
House value −0.145 0.068 −0.053 0.025 0.004 0.097† −0.003 0.033†
House owner −0.025 0.062 −0.013 0.029 0.007 0.086† 0.002 0.039†
Household size 0.142 0.105 0.052 0.038 0.034 0.147† 0.016 0.051†
N kids in HH −0.041 0.087 −0.015 0.031 −0.014 0.120† −0.006 0.042†
Union member 0.193 0.063 0.072 0.024 0.002 0.089† 0.007 0.033†
Age −0.440 0.075 −0.160 0.028 −0.033 0.105† −0.026 0.037†
Female 0.359 0.086 0.131 0.031 0.054 0.119† 0.031 0.039†
Divorced 0.077 0.112 0.028 0.042 0.002 0.157† 0.002 0.057†
Unemployed 0.181 0.129 0.069 0.050 0.000 0.180† 0.004 0.068†
Non-white 0.635 0.224 0.245 0.084 −0.145 0.315† −0.051 0.119†
Degree −0.844 0.134 −0.264 0.037 0.017 0.196† −0.031 0.045†
A-levels −0.614 0.134 −0.202 0.040 −0.016 0.189† −0.029 0.051†
O-levels −0.422 0.109 −0.152 0.038 −0.006 0.152† −0.018 0.051†
Note: Calculated using 5000 simulated values. Predicted probabilities represent unit-change in vari-able holding all else constant. Diòerences in panel (B) calculated as DP random eòects estimates− normal random eòects estimates. Diòerence estimates whose 95% HPD interval includes zeroaremarked by †.
eòect prior speciûcations, I plot posterior distributions of some selected parameters in Figure 3.It shows posterior distributions of the initial condition random eòects scale factor λ, preferencepersistence ϕ, and estimates of age and being female obtained using normal, t, and DPrandom eòects. Estimates of the scale factor and preference persistence are indistinguishablebetween normal and t-distributed random eòects. However, they are larger under the DPprior speciûcation, especially for preference persistence. Results for substantive covariatesalso diòer when using a �exible DP prior speciûcation. My estimate for the in�uence of ageon preferences for government intervention becomes smaller, while the posterior distributionof being female is clearly shi�ed to the right, indicating an even stronger eòect. Nonetheless,themagnitude of these diòerences is limited and other covariate estimates are somewhat lessaòected than the ones shown here.
To assess if these diòerences change one’s substantive results, it is advisable to focus againon steady state estimates calculated from themodel. In Table 4, panel (A), I provide steadystate eòects from the DP random eòects model. As before, I calculate them in themetric of
21

the latent variable and as predicted probabilities of preferring more government involvement.In panel (B) I calculate the diòerence to the steady state estimates based on normal randomeòects, shown in Table 3, andmark diòerence estimateswhose 95%HPD interval contains zeroby †. I ûnd that diòerences are especially marked for estimates of time-constants covariates._e diòerence between the estimated eòect of holding an advanced degree is almost threepercentage points, while the eòect of being non-white diòers by 5 percentage points. However,when taking uncertainties ofmy estimates into account, these diòerences appear to not bestatistically relevant: in each and every case the 95% highest posterior density interval of thediòerence contains zero. _us, in this particular application, one can conclude that substantiveresults obtained with a ‘simple’ gaussian random eòects speciûcation are robust to violationsof the distributional assumption of unobserved individual heterogeneity.
5. CONCLUSION
Central aim of this paper is to present a modeling strategy for analyzing the dynamics ofindividual preferences or attitudes using panel data. I employ the idea of an underlying latentcontinuous variable,which generates observed categorical preferencemeasures. _e dynamicsof themodel are also speciûed on the level of the latent variable, since it should be one’s latentpast preference – not observed survey scores – providing feedback to current preferences. Fur-thermore, I explicitly model initial conditions, following the approach suggested by Heckman(1981a, b). I capture unobserved individual heterogeneity using random eòects and discuss pos-sible shortcomings of the usual distributional assumptions. I employ a distinctively ‘Bayesian’solution to this problem, which is to specify a prior over possible random eòect distributions,in order to capture uncertainty about its true form. _is yields �exible nonparametric densityestimation of random eòects, which I use to assess the robustness ofmy ûndings.
Applying themodel to data on individuals’ preferences for government intervention overa span of 17 years, clearly shows the necessity of employing a Hierarchical dynamic panelmodeling approach. First, I ûnd a signiûcant level of preference persistence. In other words,individuals’ preferences are ‘sticky’, and covariate estimates will be biased when ignoringthis fact. Second, initial conditions matter. Individuals enter the panel study with prefer-ences already shaped by pre-sample variables and observed and unobserved characteristics._ird, nearly half of the total variation in preferences is due to unobserved individual factors,such as motivation or ability. Using both parametric and semi-parametric random eòectsspeciûcations, I show that these ûndings are robust to distributional assumptions.
Existing political science research on individual preferences and attitudes using cross-sectional data should be augmented into the time domain to explicitly study dynamic im-plications of theories. Using panel data and an appropriate dynamic model provides thetools to generate new insights into how individual preferences evolve over time, how they areshaped by observed and unobserved individual characteristics, and how individuals adjusttheir preferences in reaction to socio-economic shocks.
22

REFERENCES
Aitkin,Murray. 1999. A general maximum likelihood analysis of variance components in generalizedlinear models. Biometrics 55:117–128.
Akay, Alpaslan. 2011. Finite-sample comparison of alternativemethods for estimating dynamic paneldatamodels. Journal of Applied Econometrics (preprint) .
Albert, James H and Siddhartha Chib. 1993. Bayesian Analysis of Binary and Polychotomous ResponseData. Journal of the American Statistical Association 88:669–679.
Albert, Jim and Siddhartha Chib. 1995. Bayesian Residual Analysis for Binary Response RegressionModels. Biometrika 82:747–759.
Alesina, Alberto andGeorge-MariosAngeletos. 2005. Fairness and Redistribution. American EconomicReview 95:960–980.
Alesina, Alberto and Paola Giuliano. 2011. Preferences for Redistribution. In Handbook of SocialEconomics, edited by Jess Benhabib, Alberto Bisin, and Matthew O. Jackson. San Diego: North-Holland, 93–131.
Alesina, Alberto and Eliana La Ferrara. 2005. Preferences for redistribution in the land of opportunities.Journal of Public Economics 89:897–931.
Anderson, T W and CHsiao. 1981. Estimation of dynamicmodels with error components. Journal ofthe American Statistical Association 76:598–606.
Antoniak, CharlesE. 1974. Mixtures of DirichletProcesseswithApplications toBayesianNonparametricProblems. _e Annals of Statistics 2:1152–1174.
Arellano,Manuel and Stephen Bond. 1991. Some Tests of Speciûcation for Panel Data: Monte CarloEvidence and an Application to Employment Equations. _e Review of Economic Studies 58:277.
Arellano,Manuel and Raquel Carrasco. 2003. Binary choice panel datamodels with predeterminedvariables. Journal of Econometrics 115:125–157.
Arulampalam,W. 2000. Unemployment persistence. Oxford Economic Papers 52:24–50.Arulampalam,Wiji andMark B. Stewart. 2009. Simpliûed Implementation of the Heckman Estimator
of the Dynamic Probit Model and a Comparison with Alternative Estimators. Oxford Bulletin ofEconomics and Statistics 71:659–681.
Bartels, Brandon L, Janet M Box-steòensmeier, CorwinD Smidt, and ReneM Smith. 2011. _e dynamicproperties of individual-level party identiûcation in the United States. Electoral Studies 30:210–222.
Bartels, LarryM. 1999. Panel eòects in the American national election studies. Political Analysis 8:1–20.Beck, Nathaniel and Jonathan N Katz. 1996. Nuisance vs. Substance: Specifying and Estimating
Time-Series-Cross-Section Models. Political Analysis 6:1–36.Blackwell, David and James BMacQueen. 1973. Ferguson Distributions Via Polya Urn Schemes. _eAnnals of Statistics 1:353–355.
Blundell, Richard and Stephen Bond. 1998. Initial conditions andmoment restrictions in dynamicpanel datamodels. Journal of Econometrics 87:115–143.
Brooks, Stephen P and Gareth O Roberts. 1998. Convergence assessment techniques for Markov chainMonte Carlo. Statistics and Computing 8:319–335.
Cusack,_omas, Torben Iversen, and Phillip Rehm. 2008. Economic Shocks, Inequality, and PopularSupport for Redistribution. InDemocracy, Inequality, and Representation: A Comparative Perspective,edited by Pablo Beramendi and Christopher J Anderson. New York: Russell Sage Foundation,
23

203–231.Cusack,_omas, Torbern Iversen, and Phillip Rehm. 2005. Risks At Work: _e Demand And Supply
Sides Of Government Redistribution. Oxford Review Of Economic Policy 22:365–389.Czado, Claudia, AnetteHeyn, and Gernot Muller. 2011. Modeling individual migraine severity withautoregressive ordered probit models. Statistical Methods and Application 20:101–121.
Dunson, David B, Natesh Pillai, and Ju-Hyun Park. 2007. Bayesian density regression. Journal of theRoyal Statistical Society B 69:163–183.
Eckstein, Zvi and Kenneth Wolpin. 1999. Why Youths Drop Out Of High School: _e Impact OfPreferences, Opportunities, And Abilities. Econometrica 67:1295–1339.
Escobar,MichaelD. 1995. Nonparametric Bayesianmethods in hierarchical models. Journal of StatisticalPlanning and Inference 43:97–106.
Escobar,Michael D andMikeWest. 1995. Bayesian Density Estimation and Inference Using Mixtures.Journal of the American Statistical Association 90:577–588.
Escobar,Michael D andMikeWest. 1998. Computing Bayesian NonparametricHierarchical Models.In Practical Nonparametric and Semiparametric Bayesian Statistics, edited by Dipak K Dey, PeterMuller, and Debajyoti Sinha. Springer, 1–22.
Ferguson, _omas S. 1973. A Bayesian Analysis of Some Nonparametric Problems. _e Annals ofStatistics 1:209–230.
Ferguson, _omas S. 1974. Prior Distributions on Spaces of Probability Measures. _e Annals ofStatistics 2:615–629.
Follmann, Dean A and Diane Lambert. 1989. Generalizing Logistic Regression by NonparametricMixing. Journal of the American Statistical Association 84:295–300.
Fotouhi, Ali Reza. 2005. _e initial conditions problem in longitudinal binary process: A simulationstudy. Simulation Modelling Practice and_eory 13:566–583.
Franses, Philip Hans and J.S. Cramer. 2010. On the number of categories in an ordered regressionmodel. Statistica Neerlandica 64:125–128.
Friedman,M. 1957. A_eory of the Consumption Function. Princeton: Princeton University Press.Gelman, Andrew. 2006. Prior distributions for variance parameters in hierarchical models. BayesianAnalysis 1:515–534.
Gelman, Andrew. 2008. Scaling regression inputs by dividing by two standard deviations. Statistics inMedicine :2865–2873.
Gelman, Andrew, John B Carlin,Hal S Stern, and Donald B Rubin. 2004. Bayesian Data Analysis. BocaRaton: Chapman &Hall.
Gelman, Andrew and Donald Rubin. 1992. Inference from Iterative Simulation Using Multiple Se-quences. Statistical Science 7:457–511.
Ghosh, J K and R V Ramamoorthi. 2003. Bayesian Nonparametrics. New York: Springer.Gill, Jeò. 2008a. Bayesian Methods. A Social and Behavioral Sciences Approach. Boca Raton: Chapman&Hall.
Gill, Jeò. 2008b. Is Partial-DimensionConvergence a Problem for Inferences fromMCMCAlgorithms?Political Analysis 16:153–178.
Gill, Jeò and George Casella. 2009. Nonparametric Priors for Ordinal Bayesian Social ScienceModels:Speciûcation and Estimation. Journal of the American Statistical Association 104:1–12.
Greene,William and DavidHensher. 2010. Modeling Ordered Choices: A Primer. Cambridge: Cam-
24

bridge University Press.Grimmer, Justin. 2010. An Introduction to Bayesian Inference viaVariationalApproximations. PoliticalAnalysis 19:32–47.
Hagenaars, A., K. de Vos, andM.A. Zaidi. 1994. Poverty Statistics in the Late 1980s: Research Based onMicro-data. Report, Oõce for Oõcial Publications of the European Communities.
Hanson, Timothy E., Adam J Branscum, and Wesley O Johnson. 2005. Bayesian NonparametricModeling and Data Analysis: An Introduction. In Handbook of Statistics, Vol. 25. Elsevier, 245–278.
Harris,Mark N, Laszlo Matyas, and Patrick Sevestre. 2008. DynamicModels for Short Panels. In _eEconometrics of Panel Data. Fundamentals and Recent Developments in _eory and Practice, editedby Laszlo Matyas and Patrick Sevestre. Berlin: Springer, 249–278.
Hasegawa, Hikaru. 2009. Bayesian Dynamic Panel-Ordered Probit Model and Its Application toSubjectiveWell-Being. Communications in Statistics - Simulation and Computation 38:1321–1347.
Heckman, James J. 1978. Dummy Endogeneous Variables in a Simultaneous Equation System. Econo-metrica 46:931–959.
Heckman, James J. 1981a. Heterogeneity and State Dependence. In Studies in Labor Markets, edited bySherwin Rosen. Chicago: University of Chicago Press, 91–140.
Heckman, James J. 1981b. _e incidental parameters problem and the problem of initial conditions inestimating a discrete time-discrete data stochastic process. In Structural Analysis of Discrete Datawith Econometric Applications, edited by C. F. Manski and Daniel McFadden. Cambridge: MIT Press,179–195.
Heckman, James J and B. Singer. 1984. A Method for Minimizing the Impact of DistributionalAssumptions in EconometricModels for Duration Data. Econometrica 52:271–320.
Imai, Kosuke, Ying Lu, and Aaron Strauss. 2008. Bayesian and Likelihood Inference for 2 x 2 EcologicalTables: An Incomplete-Data Approach. Political Analysis 16:41–69.
Ishwaran,Hemant and Lancelot F James. 2001. Gibbs Sampling Methods for Stick-Breaking Priors.Journal of the American Statistical Association 96:161–173.
Ishwaran,Hemant andMahmoudZarepour. 2000. Markov chainMonte Carlo in approximate Dirichletand beta two-parameter process hierarchical models. Biometrika 87:371–390.
Ishwaran, Hemant andMahmoud Zarepour. 2002. Exact and approximate sum representations for theDirichlet process. Canadian Journal Of Statistics 30:269–283.
Iversen, Torben and David Soskice. 2001. An Asset _eory of Social Policy Preferences. AmericanPolitical Science Review 95:875–893.
Jackman, Simon. 2000. Estimation and Inference areMissing Data Problems: Unifying Social ScienceStatistics via Bayesian Simulation. Political Analysis 8:307–332.
Jackman, Simon and BruceWestern. 1994. Bayesian Inference for Comparative Research. AmericanPolitical Science Review 88:412–423.
Jackman, Simon D. 2009. Bayesian Analysis for the Social Sciences. New York:Wiley.Jara, Alejandro,Maria Jose Garcia-Zattera, and Emmanuel Lesaòre. 2007. A Dirichlet process mixture
model for the analysis of correlated binary responses. Computational Statistics and Data Analysis51:5402–5415.
Johnson, Valen E and Jim H Albert. 1999. Ordinal DataModeling. New York: Springer.Keane,MP. 1997. Modeling heterogeneity and state dependence in consumer choice behavior. Journal
of Business & Economic Statistics 15:310–327.
25

Kleinman, Ken P. and Joseph G. Ibrahim. 1998. A Semiparametric Bayesian Approach to the RandomEòects Model. Biometrics 54:921–938.
Kottas, Athanasios, Peter Muller, and Fernando Quintana. 2005. Nonparametric Bayesian Modelingfor Multivariate Ordinal Data. Journal of Computational and Graphical Statistics 14:610–625.
Kyung,Minjung, Jeò Gill, and George Casella. 2011. Sampling schemes for generalized linear Dirichletprocess random eòects models. Statistical Methods & Applications 20:259–290.
Kyung,Minyung, Jeò Gill, and George Casella. 2010. Estimation in Dirichlet Random Eòects Models._e Annals of Statistics 38:979–1009.
Laird, N. 1978. Nonparametricmaximum likelihood estimation of amixture distribution. Journal ofthe American Statistical Association 73:805–811.
Lange, Kenneth L, Roderick J A Little, and JeremyM G Taylor. 1989. Robust Statistical Modeling Usingthe t-Distribution. Journal of the American Statistical Association 84:881–896.
Lindsay, Bruce. 1995. Mixture Models: _eory, Geometry and Applications. Hayward: Institute ofMathematical Statistics.
Liu, Jun S. 1996. NonparametricHierarchical BayesVia Sequential Imputations. _e Annals of Statistics24:911–930.
Lo, Albert Y. 1984. On a class of Bayesian nonparametric estimates: I. Density estimates. _e Annals ofStatistics 12:351–357.
Lunn, David J., Jon Wakeûeld, and Amy Racine-Poon. 2001. Cumulative logit models for ordinal data:a case study involving allergic rhinitis severity scores. Statistics in Medicine 20:2261–2285.
MacEachern, S.N. and Peter Muller. 1998. Estimating mixture of Dirichlet process models. Journal ofComputational and Graphical Statistics :223–238.
Margalit, Yotam. 2011. Ideology all the way down? _e Impact of the Financial Crisis on Individu-als’ Welfare Policy Preferences. Paper presented at political economy workshop,Merton College,University of Oxford, April 2011.
McKelvey, Richard D andWilliam Zavoina. 1975. A Statistical Model for the Analysis of Ordinal LevelDependent Variables. Journal ofMathematical Sociology 4:103–120.
Moene, Kark Ove and Michael Wallerstein. 2001. Inequality, Social Insurance and Redistribution.American Political Science Review 95:859–874.
Muller, Gernot and Claudia Czado. 2005. An Autoregressive Ordered Probit Model with Applicationto High-Frequency Financial Data. Journal of Computational and Graphical Statistics 14:320–338.
Muller, Peter and Fernando Quintana. 2004. Nonparametric BayesianData Analysis. Statistical Science19:95–110.
Muller, Peter, Fernando Quintana, and Gary L Rosner. 2007. Semiparametric Bayesian Inference forMultilevel RepeatedMeasurement Data. Biometrics 63:280–289.
Mundlak, Yair. 1978. On the pooling of time series and cross section data. Econometrica 46:69–85.Navarro, Daniel J,_omas L Griõths,Mark Steyvers, andMichael D Lee. 2006. Modeling individualdiòerences using Dirichlet processes. Journal ofMathematical Psychology 50:101–122.
Neal, Radford M. 2000. Markov Chain Sampling Methods for Dirichlet Process Mixture Models.Journal of Computational and Graphical Statistics 9:249—-265.
Nerlove,Marc, Patrick Sevestre, and Pietro Balestra. 2008. Introduction. In _e Econometrics of PanelData. Fundamentals and Recent Developments in _eory and Practice, edited by Laszlo Matyas andPatrick Sevestre. Berlin: Springer, 3–22.
26

Neustadt, Ilja. 2010. Do Religious Beliefs Explain Preferences for Income Redistribution? ExperimentalEvidence. University of Zurich Socioeconomic Institute working paper 1009.
Nickell, Stephen. 1981. Biases in dynamicmodels with ûxed eòects. Econometrica 49:1417–1426.Pang, Xun. 2010. Modeling Heterogeneity and SerialCorrelation in Binary Time-SeriesCross-sectionalData: A Bayesian Multilevel Model with AR(p) Errors. Political Analysis 18:470–498.
Pudney, Stephen. 2006. _e dynamics of perception Modelling subjective well-being in a short panel.ISER Working Paper 2006-27.
Pudney, Stephen. 2008. _e dynamics of perception: modelling subjective wellbeing in a short panel.Journal of the Royal Statistical Society A :21–40.
Rabe-Hesketh, Sophia and Skrondal. 2008. Generalized linear mixed eòects models. In LongitudinalData Analysis: A Handbook of Modern Statistical Methods, edited by Garret Fitzmaurice, MarieDavidian, Geert Verbeke, and Geert Molenberghs. Boca Raton: Chapman &Hall, 79–106.
Rehm, Philipp. 2011. Risk Inequality and the Polarized American Electorate. British Journal of PoliticalScience 41:363–387.
Rehm, Philipp, Jacob S. Hacker, andMark Schlesinger. 2012. Insecure Alliances: Risk, Inequality, andSupport for theWelfare State. American Political Science Review 106:386–406.
Robert, Christan P. 2007. _e Bayesian Choice: From Decision-_eoretic Foundations to ComputationalImplementation. New York: Springer.
Rossi, Peter E, Greg M Allenby, and Robert Mcculloch. 2005. Bayesian Statistics and Marketing.Chichester:Wiley.
Schervish,Mark J. 1995. _eory of Statistics. New York: Springer.Scheve, Kenneth and David Stasavage. 2006. Religion and Preferences for Social Insurance. Quarterly
Journal of Political Science 1:255–286.Sethuraman, Jayaram. 1994. A Constructive Deûnition of Dirichlet Priors. Statistica Sinica 4:639–650.Shayo,Moses. 2009. AModel of Social Identity with an Application to Political Economy: Nation,Class, and Redistribution. American Political Science Review 103:147–174.
Skrondal, Anders and Sophia Rabe-Hesketh. 2004. Generalized latent variablemodeling:Multilevel,longitudinal and structural equation models. Boca Raton: Chapman &Hall.
Spiegelhalter, D J, A _omas, N Best, andW R Gilks. 1997. BUGS: Bayesian Inference Using GibbsSampling. Manual. Cambridge: Medical Research Council Biostatistics Unit.
Spirling, Arthur and Kevin M Quinn. 2010. Identifying Intraparty Voting Blocs in the U.K. House ofCommons. Journal of the American Statistical Association 105:447–457.
Stegmueller, Daniel. 2011. Apples and Oranges? _e problem of equivalence in comparative research.Political Analysis 19:471–487.
Varin, Cristiano and Claudia Czado. 2010. Amixed autoregressive probitmodel for ordinal longitudinaldata. Biostatistics 11:127–138.
Vella, F andMarno Verbeek. 1998. Whose wages do unions raise? A dynamicmodel of unionism andwage rate determination for young men. Journal of Applied Econometrics .
Vermunt, Jeroen. 2004. An EM algorithm for the estimation of parametric and nonparametric hierar-chical nonlinear models. Statistica Neerlandica 58:220–233.
Vermunt, Jeroen, Bac Tran, and JayMagidson. 2008. Latent Class Models in Longitudinal Research.In Handbook of Longitudinal Research. Design,Measurement and Analysis, edited by Scott Menard.Academic Press, 373–385.
27

Wawro, G. 2002. Estimating Dynamic Panel Data Models in Political Science. Political Analysis10:25–48.
Winkelmann, Rainer. 2005. Subjective well-being and the family: Results from an ordered probitmodel with multiple random eòects. Empirical Economics 30:749–761.
Wlezien, Christopher. 1995. _e Public as_ermostat: Dynamics of Preferences for Spending. AmericanJournal of Political Science 39:981–1000.
Wooldridge, Jeòrey M. 2002. Econometric Analysis of Cross Section and Panel Data. Cambridge: MITPress.
Wooldridge, Jeòrey M. 2005. Simple solutions to the initial conditions problem in dynamic, nonlinearpanel datamodels with unobserved heterogeneity. Journal of Applied Econometrics 20:39–54.
APPENDICES
A. INITIAL OBSERVATIONS
To explicate the role of initial observations, rewrite the dynamicmodel
zit = ϕzit−1 + xitβ + ξi + єit , t = 1, . . . , T
in its explicit distributed lag representation by successive backward substitution (e.g., followingHarris et al. 2008: 251):
zit = ϕtzi0 +t−1∑j=0
ϕ jxit− jβ +1 − ϕt
1 − ϕξi + ηit (23)
with ηit = ϕηit−1 + єit with ηi0 = 0._is makes obvious that each observation of zi can be expressed as the sum of several
factors. _e ûrst part of equation (23), ϕtzi0 depends on the initial observation of the panel,while the second part depends on current and past covariate values. _e third part 1−ϕt
1−ϕ ξiindicates proportional dependence on unobserved individual speciûc eòects.
Direct estimation of (23) would require suõciently large T and that ϕt decays suõcientlyrapidly with t. Alternatively, one can specify an empirical approximation of zi0 (Pudney 2008:27). Heckman’s (1981b) approximation for zi0∣xit , ξi ,
zi0 = δ′wi + λξi + єi0, (24)
as given in themain text, is obtained by ûrst writing
zi0 = δ′wi + ηi (25)
where wi = (xi0, vi) is a vector of initial condition covariates comprised of covariate valuesat sample entry xi0 and additional background information vi . ηi is an individual error
28

component at the initial condition. Next, decompose ηi into an individual speciûc (time-constant) random eòect and a stochastic disturbance at t = 0. Instead of introducing a secondindividual random eòect,Heckman employs the orthogonal projection
ηi = λξi + єi0 (26)
which speciûes ηi as resulting from random disturbance єi0 and individual speciûc eòect ξi ._e random disturbance term at the initial condition єi0 is now uncorrelatedwith ξi by design,and assumed uncorrelated with other errors, i.e. Cov(єi0, єit) = 0, ∀t > 0. _e individualspeciûc random eòects ξi are allowed to have a diòerent scaling in the initial conditionsequations by including a scale factor λ. Substituting (26) into (25) yields the reduced formequation (24) for initial observations used in themain text.
B. DIRICHLET PROCESS
In this appendix I describe the Dirichlet process in more detail.27 A Dirichlet process randomeòects model can be understood as a (countably) inûnitemixture of points. _us I start fromspecifying a ûnitemixture of points model for random eòects and set up the Dirichlet processmodel from there by letting the number of points K →∞.
Aûnite nonparametric random eòects prior Start by specifying some �exible distributionG for the random eòects:
ξi ∼ G(ϕ) (27)
with hyperparameters ϕ. G can be approximated arbitrarily close by specifying a ûnite sum ofK point masses and weights πk,
G(π, ζ) =K∑k=1
πkδζk (28)
with∑Kk=1 πk = 1 and where δζk is the Dirac delta function yielding a point mass at ζk. Here,
ϕ = (ζ , π) and random eòects ξi are sampled from this distribution and are equal to one ofthe ζk.
In a Bayesian setup (e.g. Lo 1984), one has to specify priors for the weights, such as:
ζk ∼ G0 (29)π ∼ Dirichlet(α) (30)
where each of K discrete locations ζk are sampled from some base distribution G0. _e prior
27_is section builds on the excellent presentation in Navarro et al. (2006).
29

over weights is a Dirichlet distribution of dimension K with parameters α = (α1, . . . , αK):
p(π∣α) = L(α)−1 (K∏k=1
παk−1k ) 1(π) (31)
where 1(π) is an indicator function equal to one if weights sum to one and zero otherwise. Lis a normalizing function given by:28
L(α) = ∫ (K∏k=1
παk−1k ) 1(π) dπ = ∏
Kk=1 Γ(αk)
Γ (∑Kk=1 αk)
(32)
_e Dirichlet prior for the weights π is taken to be symmetric, i.e. we use a parameter vectorof length K with (α/K , . . . , α/K), thus ensuring that the sum of the parameter vector willalways be α (e.g. Ishwaran and Zarepour 2002).
Moving to the inûnite case Having speciûed a prior for the ûnite case, we elicit a priorspeciûcation for the inûnite point mixture case by letting K →∞.
First, to make the clustering structure of themodel explicit, deûnemembership indicatorssi , which indicate to which subcluster the ith random eòect is assigned. For a random eòectof individual i the probability of belonging to subcluster k is given by the weight πk , and thus
p(si = k∣π) = πk . (33)
Using membership indicators, the prior in (29)–(30) becomes:
ζk ∼ G0 (34)π ∼ Dirichlet(α/K) (35)si ∼ Multinomial(π) (36)
wheremembership indicators are sampled from amultinomial with size one.Second, we integrate out the subcluster weights π to get the conditional subcluster
assignment probability when having already observed N − 1 random eòects assignmentsS[i] = {s1, . . . , sN−1}:
p(si = k∣S[i], α,K) = ∫ p(si = k∣π)p(π∣S[i], α,K)dπ (37)
To solve the integral, note that the ûrst term of the integrand is πk (cf. equation (33)). _e
28See, e.g. Gill (2008a: 180). Γ is the gamma function, which is a generalization of the factorial function: for anon-negative integer n, Γ(n) = (n − 1)!.
30

second term is the posterior probability
p(π∣S[i], α,K)∝ p(S[i]∣π)p(π∣α,K), (38)
i.e. the product of amultinomial and Dirichlet distribution, which implies that the posteriordistribution is also a Dirichlet (i.e. conjugacy of the resulting posterior).
Denote by mk = #{ξ1 = ζk} the number of random eòects assigned to subcluster k, andlet m = (m1, . . . ,mK) be a ‘member size’ vector giving the number of individuals in eachsubcluster. _e posterior probability p(π∣s/i , α,K) is distributed Dirichlet with parametervector s + α/K. _us
p(si = k∣s/i , α,K) (39)
= L(m + α/K)−1∫ πk (∏l
πm l+α/K−1l ) 1(π)dπ (40)
= L(m + α/K + 1(k))L(m + α/K)
(41)
= mk + α/KN − 1 + α
(42)
where 1(k) is an indicator vector (with length K) with a 1 at position k and zero otherwise.Having integrated out the weights, consider now the limiting probability that random
eòect ξi gets assigned value(s) ζk of an existing subcluster k with mk ≥ 1:
p(si = k∣S[i], α) = limK→∞
(mk + α/KN − 1 + α
) (43)
= mk
N − 1 + α(44)
Conversely, consider the limit probability that ξi gets assigned values from a new subcluster.Let K/i be the realized number of subclusters when N − 1 random eòects have already beenassigned. Denote by S the set of subclusters with mk = 0 (i.e. the K − K[i] empty subclusters)._e assignment probability for the ith random eòect is then
p(si ∈ S ∣S[i], α) = limK→∞
(∑l∈S
ml + α/KN − 1 + α
) (45)
= αN − 1 + α
limK→∞
(K − K[i]
K) (46)
= αN − 1 + α
(47)
Integrating out subcluster assignment indicator variables si yields the prior distributionfor assigning a value to random eòect ξi given that all other random eòects ξ[i] have already
31

been assigned. _is distribution is amixture of the base distribution G0 and the empiricaldistribution of N − 1 previously assigned random eòect values:
ξi ∣ξ[i], α,G0 ∼α
N − 1 + αG0 +
K[i]
∑k=1
mk
N − 1 + αδζk . (48)
Drawing a sequence of random eòects assignments from (48) yields a Polya urn schemewith parameters α and G0 (Blackwell andMacQueen 1973). Using this scheme allows us tochoose a prior for the random eòects distribution G. We require that themarginal prior overparameters (ζ1, . . . , ζ∞) follows a Polya urn scheme. Blackwell andMacQueen (1973) showthat the Dirichlet process does, andwe can thus specify the Dirichlet process as nonparametricrandom eòects prior:
ξi ∼ G (49)G ∼ DP(α,G0) (50)
Dirichlet process _e Dirichlet process is a stochastic process (a distribution over functionspaces) whose sample paths (i.e. random functions draws) are probability measures withprobability 1 (Ferguson 1973, 1974). Intuitively, it is a distribution over distributions, whereeach draw yields a Dirichlet distribution. More formally, let (Σ,B) be a (measurable) space,and let G0 be a random probability measure over it, and let α be a positive real number.A Dirichlet Process is a distribution G over (Σ,B) such that for every (ûnite measurable)partition (B1, . . . , BN):
(G(B1), . . . ,G(BN)) ∼ Dirichlet(αG0(B1), . . . , αG0(BN)). (51)
G0 can be interpreted as mean of the process, since for any measurable B, E(G(B)) = G0(B)._e ‘dispersion’, ‘strength’ or ‘prior mass’ parameter α can be understood as inverse variance,since V(G(B)) = G0(B)/(α + 1), so that larger values of α imply a tighter concentration ofthe DP around G0.
_e posterior process for a drawing G from the DP and a subsequent random eòect drawξ1 from G is a standard Dirichlet update (see Schervish 1995):
G∣ξ1 ∼ DP (αG0 + δξ1) . (52)
Iterating the updating yields
G∣ξ1, . . . , ξN ∼ DP (αG0 +N∑i=1δξ i) . (53)
To see the connection to the inûnitemixturemodel consider the predictive distribution for a
32

new ξN+1 given previous random eòect realizations ξ, with G marginalized out. For any B ⊂ Σwe again get the Polya/Blackwell MacQueen (1973) urn scheme (cf. equation 48):
E(G(B)∣ξ1, . . . , ξN) =αG0(B) +∑N
i=1 δξ i(B)α + N
(54)
→∞∑k=1
πk δζk(B) (55)
with πk = limN→∞ mk/N , and where ζk represents one unique random eòect value, andmk = #{ξi = ζk} in the sequence (ξ1, . . . , ξN). A countably inûnitemixture of the above form,which fulûls the deûnition of the Dirichlet Process, can be constructed by the stick-breakingrandom measure, as shown by Sethuraman (1994).
Stick breaking construction It is used to construct the inûnite number of weights in (55).Let
νk ∼ Beta(1, α), k = 1, 2, . . . (56)
be an inûnite sequence of beta distributed random variables. Set π1 = ν1 and construct theremaining πk via
πk = νk
k−1∏l=1
(1 − νl), k = 2, 3, . . . . (57)
Let ζk ∼ G0 and G = ∑∞k=1 πkδ(ζk); then G ∼ DP(α,G0). _is constructive scheme implies
that, just as the ûnite case in (28)–(30), G has now a clear deûnition as a random measure,since
∞∑k=1
πk = 1 wp 1. (58)
To see this note that
1 −K∑k=1
= 1 − ν1 − ν2(1 − ν1) − ν3(1 − ν2)(1 − ν1) −⋯ (59)
= (1 − ν1)(1 − ν2 − ν3(1 − ν2) −⋯) (60)
=K∏k=1
(1 − νk) (61)
→ 0 wp 1 as K →∞. (62)
Estimation via truncated Dirichlet process _e stick breaking construction suggests anapproximate sampling strategy for posterior DP inference. Choose a truncation value T for K,and set νT = 1 to ensure that weights do sum to one. _en we have a ûnite representation of
33

the inûnitemixture of points:
G =T∑k=1
πkδζk , (63)
where πk = 0 for k > T . More details are given by Ishwaran and James (2001) and and Ishwaranand Zarepour (2002). _is approximation yields good approximations even with low valuesfor T , and is computationally tractable and can be implemented in available general purposeBayesian inference packages such as JAGS,WinBUGS or PyMC. Discussions of other,moresophisticated sampling strategies (which require tailored code) are given in Escobar andWest(1995),MacEachern andMuller (1998), Neal (2000), and Kyung et al. (2011).
In any ‘real-life’ political science application, one should check if the truncation thresholdT was chosen large enough. A straightforward way is to sample from a model where T isset at twice the size, and investigate if the posterior samples of K – the sampled number ofsubclusters – are larger for this model. Figure 4 shows a histogramof the posterior distributionof K from just such a model run, where I set T = 40. It indicates that even with a highertruncation thresholds, the Dirichlet process never created more than 20 subclusters (themaximum sampled value of K is 17). _us, the truncation level used in themain part of thepaper is a good approximation.29
Posterior number of K0 10 20 30 40
0.00
0.05
0.10
0.15
0.20
Figure 4: Posterior number of subclusters sampled from TDP(α, G0, T = 40)
C. ELICITATION OF PARAMETERS OF Γ PRIOR FOR α
Kottas et al. (2005) derive an approximation of the mean and variance of the number of
29Furthermore, inspection of parameter estimates reveled no diòerences to amodel with T = 20.
34

subclusters, which can be used to select semi-informative values for the Gamma prior of α._e expected number of subclusters given precision, α, and number of observations, N , is
E(k∣α,N) =N∑i=1
αα + i − 1
≈ α log(α + Nα
) (64)
with variance
Var (k∣α,N) =N∑i=1
α(i − 1)(α + i − 1)2 ≈ α [log(α + N
α) − 1] . (65)
As a result ofmy Gamma prior speciûcation E(α) = a0/b0 and Var(α) = a0/b20. Some algebra
yields the a priori expectedmean and variance for the number of subclusters (cf. Kottas et al.2005; Liu 1996: 916):
E(k) ≈ a0b0
log(1 + nb0a0
) (66)
Var(k) ≈ a0b0
log(1 + nb0a0
) − nb0a0
+ [log(1 + nb0a0
) − nb0a0 + nb0
]2 a0b20
(67)
_is expressions can be evaluated numerically to obtain reasonable values for a0 and b0 givenones prior expectations of themean number of subclusters.30
D. INVERSE-GAMMA VARIANCE PRIORS
As mentioned in subsection 2.3 there are good reasons to prefer more informative priors forthe random eòect variance. In this section, I describe the speciûcation (or ‘elicitation’) of twosets of hyperprior values.
Usually one speciûes a prior for the inverse variance, or precision. _eGamma distributionis a popular choice (e.g. Gelman et al. 2004: 579). With given a-priori values for the expectedmean m0 and variance v0 of the random eòect precision σ−2
ξ , hyperprior values for Γ(a0, b0)are given by:31
a0 = m20/v0 (68)
b0 = v0/m0 (69)
Alternatively, when specifying a prior for the variance directly the inverse gamma distribution
30If researchers feel uncomfortable with choosing values based on expectations about K, they can either relyon priors suggested in the literature such as Γ(1, 1) or Γ(2, 2), which prevent very small and large values(Ishwaran and Zarepour 2000).
31I use the same notation for shape and scale of the Gamma distribution (a0 , b0) as in subsection 3.2 purely fornotational convenience.
35

0 1 2 3 4
0.0
0.5
1.0
1.5
Precision σ−2
Den
sity
Γ(0.5158, 1.392)Γ(2.063, 0.3481)
Figure 5:Distribution of variance prior precision under two Gamma prior speciûcations(based on 10,000 samples from prior distribution).
can be used. Here hyperprior values for Γ−1(a0, b0) are given by:
a0 = (m20 + 2v0)/v0 (70)
b0 = m0(m20 + v0)/v0 (71)
A simple random eòects ordered probitmodelût using a laplace approximation to integrateout the random eòects (ignoring the lagged dependent variable, and initial conditions) suggesta variance of the individual eòects of ca. 1.392 or a precision of 0.7182. _us, settingm0 = 0.7182I choose a two diòerently ‘tight’ v0 values: v0 = {1, 0.25}. _is leads to hyperprior values ofa0 = 0.5158, b0 = 1.3924, and a0 = 2.0632, b0 = 0.3481. _e resulting prior distributions areillustrated in Figure 5 which plots 10,000 draws from the respective prior distributions.
Re-estimating my main model with these two more informative random eòects varianceprior choices leads to very similar estimated variances of 0.83 (sd=0.09) and 0.84 (sd=0.09),respectively. Coeõcient estimates are virtually indistinguishable at two signiûcant ûgures.
E. DP RANDOM EFFECTS ESTIMATES
Table 5 shows estimated parameters of themodel with Dirichlet process random eòects. α isthe estimated dispersion parameter of the Dirichlet process; K represents the sampled valueof the number of clusters at each MCMC step.
36

Table5:P
osterior
sum
maryfo
rHiera
rchica
ldynam
iclatent
orde
redpr
obitm
odelwith
Dirichlet
proces
srando
meòec
ts.
Initialco
nditi
ons
Mea
nSD
95%
HPD
Dynam
ics
Mea
nSD
95%
HPD
δ 1[Per
manen
tinc
ome]
−0.40
30.130
−0.66
5−0.15
5β 1
[Per
manen
tinc
.]−0.39
30.06
7−0.52
6−0.26
5δ 2
[Tra
nsito
ryinco
me]
−0.07
20.12
4−0.31
20.17
2β 2
[Tra
nsito
ryinc.]
−0.06
10.038
−0.13
50.01
6δ 3
[Inc
omeshare]
0.09
90.11
3−0.118
0.32
6β 3
[Inc
omeshare]
−0.10
40.050
−0.20
3−0.00
7δ 4
[Hou
seva
lue]
−0.40
20.24
1−0.87
30.07
1β 4
[Hou
seeq
uity]
−0.110
0.05
2−0.21
4−0.01
1δ 5
[Hou
seow
ner]
0.00
40.10
5−0.20
40.20
9β 5
[Hou
seow
ner]
−0.020
0.04
7−0.11
10.07
4δ 6
[HH
size]
0.38
50.19
20.01
40.770
β 6[H
Hsize]
0.108
0.07
9−0.050
0.260
δ 7[N
kids
inHH]
−0.12
90.17
2−0.47
10.20
4β 7
[Nkids
inHH]
−0.03
20.06
6−0.160
0.09
7δ 8
[Uni
onmembe
r]0.17
10.10
1−0.02
70.370
β 8[U
nion
membe
r]0.148
0.048
0.05
30.24
1δ 9
[Age]
−0.720
0.12
6−0.97
1−0.47
9β 9
[Age]
−0.33
60.05
6−0.44
6−0.22
5δ 1
0[Female]
0.48
50.11
30.26
50.710
β 10
[Female]
0.27
40.06
40.14
70.400
δ 11
[Divorced]
0.04
70.24
1−0.42
70.50
9β 1
1[D
ivorced]
0.05
70.08
5−0.100
0.23
1δ 1
2[U
nem
ployed]
−0.408
0.22
1−0.83
40.03
5β 1
2[U
nem
ployed]
0.13
70.09
9−0.058
0.33
1δ 1
3[N
on-w
hite]
0.13
40.29
3−0.44
30.70
3β 1
3[N
on-w
hite]
0.48
20.17
10.15
20.820
δ 14
[Deg
ree]
−0.49
90.17
3−0.83
3−0.15
6β 1
4[Deg
ree]
−0.64
30.10
1−0.84
5−0.44
9δ 1
5[A
-leve
ls]−0.54
60.17
1−0.87
3−0.20
3β 1
5[A
-leve
ls]−0.46
90.10
2−0.66
6−0.26
7δ 1
6[O
-leve
ls]−0.48
50.14
2−0.760
−0.20
2β 1
6[O
-leve
ls]−0.32
40.08
2−0.480
−0.160
δ 17
[Paren
ts:u
nskilled]
0.48
10.13
90.20
70.75
1β 0
[Interce
pt]
0.40
50.07
30.26
40.55
1δ 18
[Paren
ts:s
killed]
0.26
40.118
0.03
40.49
6κ 2
0.81
10.018
0.77
70.84
4δ 1
9[Paren
ts:w
hite-collar]
0.32
40.12
70.07
70.57
2ϕ
0.23
70.02
60.18
50.288
δ 20
[Paren
ts:self-em
pl.]
0.160
0.13
1−0.088
0.42
5r
−0.010
0.01
2−0.03
40.01
2δ 2
1[L
ondo
n]0.05
40.13
9−0.22
40.320
α1.47
60.508
0.58
32.50
2λ
1.20
60.10
90.99
41.418
K11
.944
3.19
96.000
18.000
Dev
iance
2570
4DIC
2619
2Po
ster
iorp
redictivep-va
lue
0.55
1
Note:Ba
sedon
20.000
MCMCdraw
s._
resh
oldτ 1ûxedat0.Ba
lanced
pane
l.N1=
9044,N
2=12
92).
37

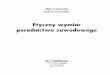
















![Catalogue DLS VF · 2019. 3. 7. · Sonorisation Vidéo Éclairage Structure Énergie Autre DIVERS SONORISATION! ˘ " ˘ Interphonie:h Z. .jZ !ˇk !ˇk ˇ$ 120,00 € % ] _w Z.](https://img.dokumen.tips/doc/110x75/601d5f13bef3312c477e47bd/catalogue-dls-vf-2019-3-7-sonorisation-vido-clairage-structure-nergie.jpg)










