Embed Size (px)
Citation preview
Mixture Ratio and Thrust Control of a Liquid-PropellantRocket Engine
Henrique Coxinho Tomé Raposo
Thesis to obtain the Master of Science Degree in
Aerospace Engineering
Supervisor: Eng. Elisa Cliquet Moreno
Dr. António Manuel dos Santos Pascoal
Examination Committee
Chairperson: Dr. João Manuel Lage de Miranda Lemos
Supervisor: Dr. António Manuel dos Santos Pascoal
Member of the Committee: Dr. Luís Manuel Braga da Costa Campos
November 2016

ii
Resumo
Atualmente a maioria dos motores de foguetoes europeus funcionam em anel aberto. Para obter
uma determinada forca propulsiva e racio de consumo de combustıveis e necessario ajustar a seccao das
valvulas que controlam o caudal dos combustıveis antes de cada voo. Na pratica, este procedimento
limita o desempenho porque existem um conjunto de perturbacoes externas que atuam sobre o motor
ao longo do voo, o que se traduz na deriva do ponto de equilıbrio. A dispersao e a imprevisibilidade
associada a esta deriva tem um impacto negativo sobre a quantidade de combustıveis embarcados para
assegurar o sucesso da missao. O presente trabalho implementa um controlador em anel fechado para
o motor VINCI, tendo por objetivo assegurar a manutencao de um ponto de equilıbrio otimo nominal
assim como a transicao para um regime a 70% da forca propulsiva nominal. Primeiramente, obtem-se um
modelo linear reduzido a cinco estados do ciclo termodinamico expander, combinando uma abordagem
analıtica de linearizacao e um metodo de identificacao de mınimos quadrados. Dois controladores PID
sao ajustados com base nos pares input-output que minimizam os efeitos de acoplagem. Modificacoes
tais como feed-forward, anti-windup e tratamento das medidas dos sensores sao realizadas de forma a
respeitar as especificacoes. Simulacoes efetuadas no modelo nao-linear indicam que um unico controlador
e suficientemente robusto para realizar a transicao entre regimes. Este trabalho confirma a aplicabilidade
de um controlador PID modificado a um motor naturalmente estavel e estabelece a base para o estudo
da dinamica dominante de outros ciclos termodinamicos.
Palavras-chave: VINCI, Ciclo termodinamico expander, Controlo de forca propulsiva, Con-
trolo de racio de mistura, PID
iii

iv

Abstract
Presently, most European launchers’ engines work in open-loop. Not only does this oblige the valves
which regulate the mass flow-rates to be calibrated before flight in order to obtain a desired thrust and
mixture ratio, but it also limits performance. Varying operating conditions translate into a drifting
equilibrium point. The associated dispersion forces us to carry extra propellants to ensure mission
success. The present work implements a closed-loop controller on the VINCI engine, which aims to
maintain an optimal nominal equilibrium point despite external perturbations, and also to transition to
a 70% thrust regime. To meet these objectives, a reduced linear model of the expander thermodynamic
cycle of the engine is obtained through a combination of an analytic linearization approach and a least-
squares identification method. A sensitivity study confirms that 5 states suffice to describe the dominant
dynamics. Two PID controllers are tuned based on the input-output pairings that minimize coupling
within the 2 × 2 MIMO system. Modifications such as feed-forward, anti-windup and measurements
filtering are made in order to match the control specifications. Simulations on the non-linear model
indicate a single controller to be both capable of maintaining an operating point and of transitioning
to the low-thrust regime, all while attenuating perturbations. Robustness to parameter uncertainty is
assessed and preliminary results indicate actuator saturation before the controller displays any signs of
instability. This work confirms the applicability of a modified PID controller to a naturally stable engine
and lays the foundation to the study of other thermodynamic cycles.
Keywords: VINCI, Expander thermodynamic cycle, Thrust control, Mixture-ratio control, PID
v

vi

Contents
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
1 Introduction 1
1.1 Historical Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Controlled Engines and Reusable Rockets . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Previous Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Liquid-propellant Engines 9
2.1 Propulsion Fundamentals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Engine Work Principle and Classification . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.1 Liquid Propellants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Elements of Control Theory 17
3.1 State-space Model Linearization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Model Identification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1 Least-squares Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Reduction Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.1 Matched DC Gain Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.4 Controllability and Observability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4.1 Controllability and Observability Matrices . . . . . . . . . . . . . . . . . . . . . . . 21
3.5 Singular Values and Modulus Margin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.6 Robustness Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
vii

4 VINCI Engine 27
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Thermodynamic Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.3 Mixture Ratio and Thrust Control Valves . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.4 VINCI Governing Equations Linearization . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.4.1 State-space Model Assembly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 Model Implementation 35
5.1 Analytical Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.1.1 Complete Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.1.2 Reduced Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.2 Identified Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2.1 Complete Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.2.2 Reduced Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.2.3 Controllability and Observability . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.3 Model Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.4 Model Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.4.1 Turbo-pump Moment of Inertia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.4.2 Regenerative Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.4.3 Hydrogen Injection Cavity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.4.4 Mode Analysis Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6 Control Specifications 51
6.1 Transient and Steady-State Time-Response . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.2 Stability margins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.3 Discretization Frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.4 Sensor’s Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.5 Parameter Uncertainty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.6 Domain Variation of the Input Perturbations . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.7 Mechanical and Thermal Bounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.8 Failure Events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.9 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
7 Control Law Design and Implementation 55
7.1 PID Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7.2 PID Controller Design with the Reduced Linear Model . . . . . . . . . . . . . . . . . . . . 58
7.3 Effect of the Valve’s Dynamic Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
7.4 Performance Evaluation on the Complete Linear Model and Measurement Noise Effect . . 60
viii

7.4.1 Simulink Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.4.2 Closed-loop Poles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.4.3 Modulus Margin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7.4.4 Frequency Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
7.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
8 Results 67
8.1 Flight Simulation on the CARINS Non-linear Model . . . . . . . . . . . . . . . . . . . . . 67
8.1.1 Energy Consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
8.2 Robustness to Parameter Uncertainty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8.2.1 Complete Linear Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8.2.2 Non-Linear Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
8.2.3 Failure cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
8.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9 Conclusion and Future Work 79
9.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
9.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Bibliography 81
A Engine State Admissible Bounds 83
ix

x
List of Tables
4.1 Vinci engine nominal equilibrium point. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2 Characteristics of the ISFM valves (brushless motor) - confidential data. . . . . . . . . . . 30
4.3 Number of states, inputs and outputs of the analytic linear model. . . . . . . . . . . . . . 33
5.1 Input-output equilibrium values at 130kN. . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2 Poles of the reduced analytical linear model. . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.3 Poles of the reduced identified linear model. . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.4 Zeros of the reduced identified linear model. . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.5 2% range settling times of the non-linear model. . . . . . . . . . . . . . . . . . . . . . . . 41
5.6 Controllability and observability matrix ranks of the identified models. . . . . . . . . . . . 43
5.7 Settling times for varying turbo-pump moment of inertia. . . . . . . . . . . . . . . . . . . 47
5.8 Poles of the reduced identified linear model after a decrease of 50% of the heat capacity of
the interface wall between the regenerative circuit and the combustion chamber. . . . . . 48
5.9 Zeros of the reduced identified linear model after a decrease of 50% of the heat capacity of
the interface wall between the regenerative circuit and the combustion chamber. . . . . . 48
5.10 Poles of the reduced identified linear model after an increase of 50% of the heat capacity
of the interface wall between the regenerative circuit and the combustion chamber. . . . . 49
5.11 Zeros of the reduced identified linear model after an increase of 50% of the heat capacity
of the interface wall between the regenerative circuit and the combustion chamber. . . . . 49
7.1 Gain and phase margins for each transfer function of the closed-loop. . . . . . . . . . . . . 64
8.1 Studied uncertain parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
8.2 Robustness limits to failure events. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
xi

xii

List of Figures
1.1 Fuel consumption during flight. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Block diagram of the controlled system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 General engine design and its main subsystems (image courtesy of Snecma). . . . . . . . . 13
4.1 VINCI’s synoptic (image extracted from [24]) . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2 VBPH Simulink block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1 Linear and non-linear models time-response comparison to a VBPH section step of 20% of
the nominal value at t = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2 Linear and non-linear models time-response comparison to a VBPO section step of 10% of
the nominal value at t = 0.25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.3 Full and reduced linear models time-response comparison to a VBPH section step of 20%
of the nominal value at t = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.4 Full and reduced linear models time-response comparison to a VBPO section step of 10%
of the nominal value at t = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.5 Full identified linear model and non-linear model time-response comparison to a VBPH
section step of 1% of the nominal value at t = 0 and a VBPO section step of 1% of the
nominal value at t = 0.25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.6 Reduced identified linear model and non-linear model time-response comparison to a VBPH
section step of 1% of the nominal value at t = 0 and a VBPO section step of 1% of the
nominal value at t = 0.25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.7 Reduced identified linear model and non-linear model time-response comparison to a VBPH
section step of 10% of the nominal value at t = 0 and a VBPO section step of 10% of the
nominal value at t = 0.25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.8 Reduced identified linear model and non-linear model time-response comparison to a VBPH
section step of 15% of the nominal value at t = 0 and a VBPO section step of 15% of the
nominal value at t = 0.25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.9 Reduced identified linear model and non-linear model time-response comparison to a VBPH
section step of 1% of the nominal value at t = 0 and a VBPO section step of 1% of the
nominal value at t = 0.25 around the 130kN equilibrium point. . . . . . . . . . . . . . . . 43
5.10 Bode plots of the five models for a VBPH input. . . . . . . . . . . . . . . . . . . . . . . . 45
xiii
5.11 Bode plots of the five models for a VBPO input. . . . . . . . . . . . . . . . . . . . . . . . 45
5.12 VBPH (t = 0) and VBPO (t = 0.5) step time-responses for turbo-pump systems with
different moments of inertia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.13 VBPH and VBPO step time-responses for interface walls with different heat capacities. . 48
5.14 VBPH and VBPO step time-responses for hydrogen injection cavities with different volumes. 49
6.1 Block diagram of the sensors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7.1 PID block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.2 Bode plots of the scaled open-loop transfer functions. . . . . . . . . . . . . . . . . . . . . . 57
7.3 Time response to a step of mixture ratio (MR = −1 at t = 1/6). . . . . . . . . . . . . . . 58
7.4 Time response to a step of mixture ratio (MR = −1 at t = 1/6). . . . . . . . . . . . . . . 59
7.5 Output time response to a step of mixture ratio (MR = −1 at t = 0.2) on the complete
linear model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.6 Input time response to a step of mixture ratio (MR = −1 at t = 0.2) on the complete
linear model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
7.7 Scaled bode plot of the diagonal transfer functions of the closed loop system. . . . . . . . 61
7.8 Input time response to a step of mixture ratio of MR = −1 at t = 1/6 on the complete
linear model with measurement noise. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
7.9 Closed-loop block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.10 Pole-zero maps of the closed-loop system. . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7.11 Maximum and minimum singular values of I +GK. . . . . . . . . . . . . . . . . . . . . . 63
7.12 Maximum and minimum singular values of the closed-loop transfer functions. . . . . . . . 65
8.1 Output references during flight simulation. . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
8.2 Non-linear system flight simulation results. . . . . . . . . . . . . . . . . . . . . . . . . . . 69
8.3 Valve consumption comparison when adding a deadzone to the error signals. . . . . . . . 70
8.4 Non-linear system flight simulation results with a dead-band associated to the setpoint error. 70
8.5 Output references during flight simulation. . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8.6 Relative frequency histograms of the performance parameters. . . . . . . . . . . . . . . . . 73
8.7 Relative frequency histograms of the performance parameters. . . . . . . . . . . . . . . . . 74
8.8 PID with anti-windup block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
8.9 Non-linear system flight simulation results for the worst-cases. . . . . . . . . . . . . . . . . 76
8.10 Non-linear system flight simulation results with failure event. . . . . . . . . . . . . . . . . 78
A.1 Nominal non-linear system flight simulation results. . . . . . . . . . . . . . . . . . . . . . 83
A.2 Non-linear system flight simulation results for the worst-cases among the uncertainty set. 84
xiv

Nomenclature
Propulsion: Roman symbols
Cd Flow coefficient.
Cw Wall specific heat capacity.
F Thrust.
g0 Acceleration of gravity at sea level.
Is Specific impulse.
J Moment of inertia.
kp Pressure loss coefficient.
L Length.
m Mass flow rate.
MR Mixture ratio.
p Static pressure.
Pchem Available chemical power.
Pkin Available kinetic power.
Pthermal Available thermal power.
QR Available energy per unit mass of chemical propellant.
R Ideal gas constant.
S Open section.
T Temperature.
V Volume.
v Gas ejection velocity relative to the vehicle.
Propulsion: Greek symbols
η Efficiency.
Φ Heat flux.
κ Real gas specific heat ratio.
ρ Density.
Control systems: Roman symbols
A,B,C,D Linear state-space representation matrices.
Ai, Ao Input and output signal amplitude.
fi i-th state function of a state-space representation.
xv
G(s) Plant model transfer matrix.
gi i-th output function of a state-space representation.
I Identity matrix.
j Imaginary unit.
K(s) Controller transfer matrix.
L(s) Open-loop transfer matrix.
L[t0,t1](u(t)) Reachability map.
m Number of inputs of a state-space model.
n Number of states of a state-space model.
p Number of outputs of a state-space model.
r Modulus margin.
R(s) Relative gain array.
S(s) Output sensitivity transfer matrix.
t Time.
U Matrix of output singular vectors.
ui i-th input of a state-space representation.
uk Input vector at instant k.
V Matrix of input singular vectors.
xi i-th state of a state-space representation.
xk State vector at instant k.
xr, xnr Subset of states to be truncated and to be kept, respectively.
yi i-th output of a state-space representation.
yk Output vector at instant k.
Control systems: Greek symbols
αi(t) Scalar time functions of the series expansion of the exponential function.
∆ Variational quantity with respect to an equilibrium point (vector operator).
δ Variational quantity with respect to an equilibrium point (scalar operator).
ω Angular frequency.
σ Maximum singular value.
Σ Singular value matrix from the singular value decomposition.
σ Singular value.
¯σ Minimum singular value.
θ Geometric open angle of a valve.
Superscripts
−1 Matrix inverse.
x Steady-state value.
x Time derivative.
H Hermitian transpose or conjugate transpose.
x Scaled vector.
xvi

T Transpose.
Subscripts
0 Steady-state quantity.
atm Atmospheric.
chmb Combustion chamber.
comb Combustion process.
exp Gas expansion and ejection process.
e Inlet.
fuel Fuel.
g Geometric.
hyd Hydraulic.
H Hydrogen.
injH Hydrogen injector.
nozzle At the exit of the nozzle of the engine.
oxi Oxidizer.
O Oxygen.
P Pump.
scl Scaling matrix.
s Outlet.
T Turbine.
t Nozzle throat.
xvii

xviii

Glossary
CARINS Unsteady Network Calculator (Calculateur de
Reseaux Instationnaires).
CNES Centre National d’Etudes Spatiales.
DF Describing Function.
LH2 Liquid Hydrogen.
LMDE Lunar Module Descent Engine.
LOX Liquid Oxygen.
LPRE Liquid-Propellant Rocket Engine.
MIMO Multiple Input Multiple Output.
MR Mixture Ratio.
PAM Propellant Active Management System.
PCC Combustion Chamber Pressure.
PEP Pump Inlet Pressure.
PID Proportional Integral Derivative.
SISO Single Input Single Output.
SSME Space Shuttle Main Engine.
SVD Singular Value Decomposition.
TEP Pump Inlet Temperature.
TPH Hydrogen Turbo-pump.
TPO Oxygen Turbo-pump.
TVC Thrust-vector Control System.
VBPH Hydrogen By-pass Valve.
VBPO Oxygen By-pass Valve.
xix

xx
Chapter 1
Introduction
1.1 Historical Background
To this day it is still unclear when the first true rockets appeared. Throughout more than 2000
years various cultures have experimented with propulsive devices, often by accident. One of the earliest
reported true rockets was developed in China in the 13th century. While using gunpowder-filled tubes to
create fireworks they realized that when the tubes failed to explode the escaping gases produced a driving
force [1]. Soon they were using gunpowder-filled bamboo tubes attached to arrows that they would then
launch with bows for war purposes. This was called the fire arrow.
With the advances made in science, namely the understanding of physical motion wrapped within
three simple yet powerful scientific laws formulated by Sir Isaac Newton in the late 17th century, rock-
etry became a science itself. Much like in the early Chinese civilization, most of the investigation and
experimentation was driven by warfare objectives. It was not until 1898 that a Russian school teacher,
Konstantin Tsiolkovsky, proposed the use of rockets as a means of transportation, particularly for space
exploration [1]. He was also the first one to establish the fundamental rocket flight equation and to
suggest the use of liquid propellants to achieve higher exhaust velocities and thus higher overall velocity
and range [2].
On the other side of the Pacific ocean, Robert H. Goddard, an American scientist, conducted practical
experiments in rocketry, particularly with liquid-propellant engines. He was the first one to achieve a
successful flight with said engines despite a variety of additional difficulties when compared to a solid-
propellant rocket [1].
Other important scientists whose names are tied to the origins of rocketry and space travel include
Hermann Julius Oberth and Esnault-Pelterie [3]. Their ground-breaking work was often undertaken
without knowledge of each others developments (nor of Goddard’s or Tsiolkovsky’s for that matter) which
led to a series of claims of having discovered the same concepts independently [4]. Lastly, no historical
background on rocketry would be complete without mentioning Wernher Von Braun, a German engineer
who, among various other things, headed the development of the V-2 and Saturn V rockets [5].
From the beginning of the 20th century onwards, rocket science would experience its fastest ever
1

growing period, fuelled by the second world war but mostly by the cold war and the space race. Within
merely 31 years of Goddard’s first successful experiment with liquid-propellant rockets, the Soviet Union
would launch the first artificial satellite into space. An astounding breakthrough that would spice up the
space race and that would be followed by a number of unimaginable feats. Animals, people and machines
would soon be frequently sent in low Earth orbits. A man would walk on the moon.
Nowadays satellite launchers are extremely heavy and complex systems. They are often multi-staged,
combine liquid and solid-propellant engines and carry embedded systems that perform guidance and
navigation. Among their main non-military applications are satellite launches for a wide range of purposes
- telecommunications, Earth observation, positioning systems, scientific experiments, etc. - and spacecraft
launch for interplanetary exploration. A rocket’s main function is thus to deliver a system, be it a satellite
or a spacecraft, to its orbit by imposing the right velocity vector and it is so far the only known way to
do so. Consequently, it is of foremost importance for any country that wishes to have unfettered access
to space.
1.1.1 Controlled Engines and Reusable Rockets
Mixture ratio (MR) is defined as the ratio between the mass flow rate of the oxidizer and that of the
fuel of a liquid propellant rocket engine (LPRE). Controlling both the thrust and mixture ratio of an
LPRE can be critical to conclude a mission successfully. Throttling, which is commonly used to describe
the use of valves to control propellant mass flow rates and therefore overall thrust magnitude, is the most
commonly used technique [6]. Whether it is to boost the overall performance and efficiency of the launch
system or to execute a landing, control over the magnitude of the thrust vector and over the fuels’ mass
flow rates is vital. For the former, ”shallow throttling”, which includes control in the 25-100% range of
nominal thrust, is adequate. For the latter, ”deep throttling”, a term which describes the application of
this technique to the remaining 25% of thrust, may be required [7].
Throughout the last 60 years there are a number of examples of engines in which these techniques
were used. Some of the most iconic ones as well as ongoing projects will be mentioned in the following
sections.
Lunar Module Descent Engine (LMDE)
The LMDE, which was used in the lunar landings of Apollo 11, 12, 14, 15, 16 and 17, was a pressure-
fed engine that used the earth-storable hypergolic bi-propellants nitrogen tetroxide and Aerozine. Among
its key objectives were precise control over thrust and mixing ratio to maintain both nominal performance
parameters and combustion stability and the ability to perform several space-vacuum restarts. It was the
first engine to demonstrate the feasibility of a 10:1 throttle ratio application [7].
Space Shuttle Main Engine (SSME)
The Space Shuttle was the first reusable spacecraft ever built. It used a vertical launch horizontal
landing configuration in which both the orbiter payload spacecraft and the solid boosters were retrieved
and reused. The SSME used liquid oxygen (LOX) and liquid hydrogen (LH2) as an oxidizer and fuel
2

combination for its liquid propellant engine. Among its key objectives were ”reusability, high performance,
accurate thrust and mixture ratio control, and very high reliability” [8]. The engine was capable of
operating between 65-109% of its nominal thrust [7].
Merlin Family
SpaceX’s Falcon 9 Full Thrust, a two-stage partially reusable launching system, uses Merlin engines
both in the first and the second stage of the rocket. This engine uses LOX and rocket-grade kerosene
as propellants. According to the October 2015 revision of the Falcon 9 User’s Guide [9], the first stage
Merlin engines have a 70-100% throttling range whereas the second stage vacuum engine goes as low as
38.5%. Recently, SpaceX successfully landed for the first time the first stage of their Falcon 9 Full Thrust
rocket in an unmanned sea platform.
RL-10 Engine
Yet another example of a highly throttleable and reliable engine is the RL-10 which has been used
for more than five decades and that is currently equipping the Atlas V and Delta IV launching systems.
Developed by Pratt & Whitney, this engine has been used with different combinations of propellants,
including Fluorine/Hydrogen, Flox/Methane, LOX/Propane and LOX/LH2. It has successfully demon-
strated throttling beyond a 10:1 throttle ratio [7].
These constitute only four examples of a larger group of engines that have successfully implemented
this technique. The interested reader is directed to Blue Origin’s New Shepard rocket and the Russian
RD engine series.
1.2 Motivation
Nowadays in Europe most launcher’s engines work in open-loop. As a consequence, during ground
tests one needs to calibrate a number of valves which control the mass flow rates of the propellants
in order to obtain a desired thrust and mixing ratio. They then remain with the same open-section
throughout the flight duration. While it is true that some engines have a binary position system for the
control valves which allows for some in-flight adjustment, current technology does not allow for precise
control over the operating point during flight.
All through the ascent, there is both an increase in temperature of the stocked fuel and non-negligible
variations of the inlet pressure with the acceleration of the launcher. At the same time, there are other
internal and external conditions that vary due to changes in altitude, thermal effects on the materials
and overall ageing. Taken all this into account, an open-loop engine actually has a varying operating
point despite the fact that the valves aren’t adjusted. Consequently, there are a number of reasons why
we take an interest in controlling both the mixing ratio and the thrust (or, equivalently, the pressure in
the combustion chamber) which fall under two categories.
From a performance’s point of view, the use of a closed loop would not only allow us to suppress
certain ground tests which would no longer be necessary for adjusting purposes, but also to maintain a
3
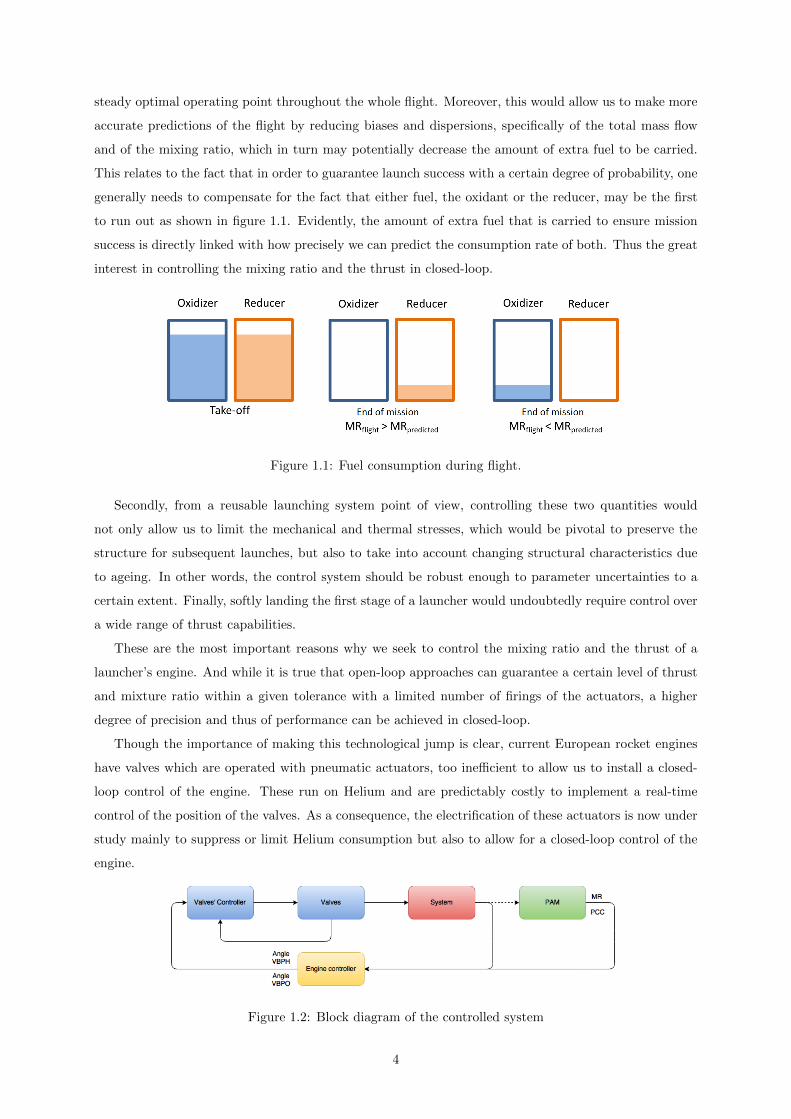
steady optimal operating point throughout the whole flight. Moreover, this would allow us to make more
accurate predictions of the flight by reducing biases and dispersions, specifically of the total mass flow
and of the mixing ratio, which in turn may potentially decrease the amount of extra fuel to be carried.
This relates to the fact that in order to guarantee launch success with a certain degree of probability, one
generally needs to compensate for the fact that either fuel, the oxidant or the reducer, may be the first
to run out as shown in figure 1.1. Evidently, the amount of extra fuel that is carried to ensure mission
success is directly linked with how precisely we can predict the consumption rate of both. Thus the great
interest in controlling the mixing ratio and the thrust in closed-loop.
Figure 1.1: Fuel consumption during flight.
Secondly, from a reusable launching system point of view, controlling these two quantities would
not only allow us to limit the mechanical and thermal stresses, which would be pivotal to preserve the
structure for subsequent launches, but also to take into account changing structural characteristics due
to ageing. In other words, the control system should be robust enough to parameter uncertainties to a
certain extent. Finally, softly landing the first stage of a launcher would undoubtedly require control over
a wide range of thrust capabilities.
These are the most important reasons why we seek to control the mixing ratio and the thrust of a
launcher’s engine. And while it is true that open-loop approaches can guarantee a certain level of thrust
and mixture ratio within a given tolerance with a limited number of firings of the actuators, a higher
degree of precision and thus of performance can be achieved in closed-loop.
Though the importance of making this technological jump is clear, current European rocket engines
have valves which are operated with pneumatic actuators, too inefficient to allow us to install a closed-
loop control of the engine. These run on Helium and are predictably costly to implement a real-time
control of the position of the valves. As a consequence, the electrification of these actuators is now under
study mainly to suppress or limit Helium consumption but also to allow for a closed-loop control of the
engine.
Figure 1.2: Block diagram of the controlled system
4
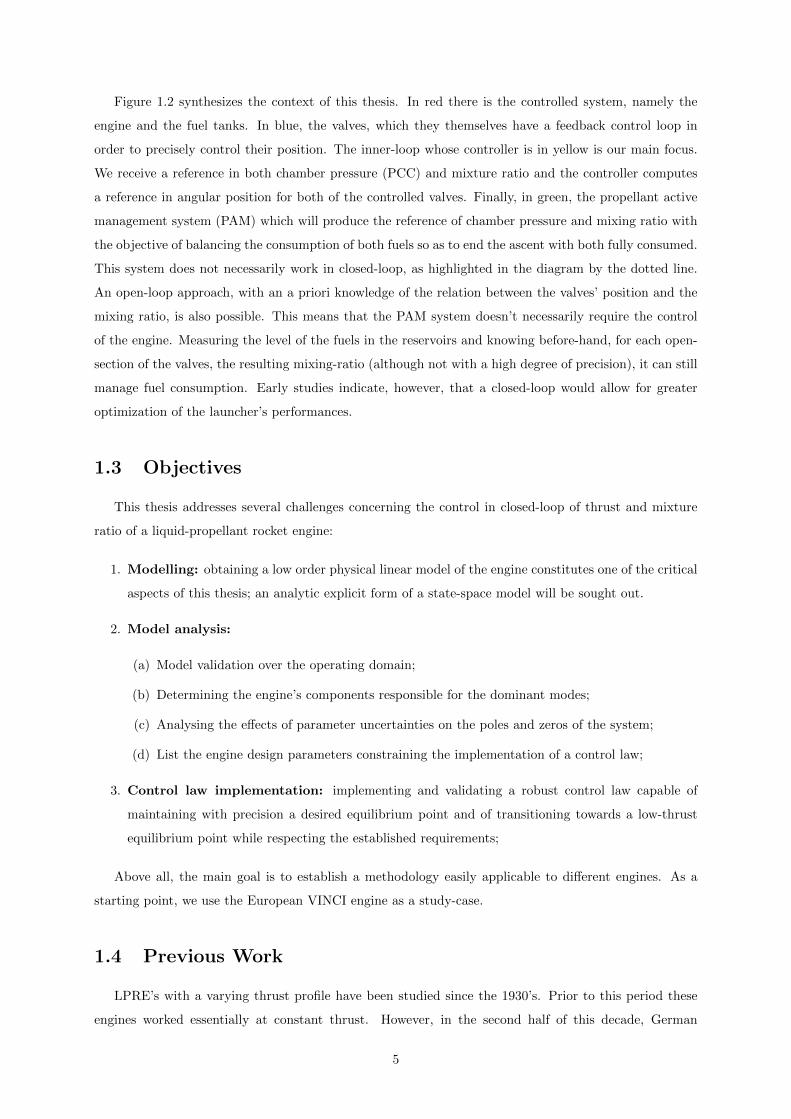
Figure 1.2 synthesizes the context of this thesis. In red there is the controlled system, namely the
engine and the fuel tanks. In blue, the valves, which they themselves have a feedback control loop in
order to precisely control their position. The inner-loop whose controller is in yellow is our main focus.
We receive a reference in both chamber pressure (PCC) and mixture ratio and the controller computes
a reference in angular position for both of the controlled valves. Finally, in green, the propellant active
management system (PAM) which will produce the reference of chamber pressure and mixing ratio with
the objective of balancing the consumption of both fuels so as to end the ascent with both fully consumed.
This system does not necessarily work in closed-loop, as highlighted in the diagram by the dotted line.
An open-loop approach, with an a priori knowledge of the relation between the valves’ position and the
mixing ratio, is also possible. This means that the PAM system doesn’t necessarily require the control
of the engine. Measuring the level of the fuels in the reservoirs and knowing before-hand, for each open-
section of the valves, the resulting mixing-ratio (although not with a high degree of precision), it can still
manage fuel consumption. Early studies indicate, however, that a closed-loop would allow for greater
optimization of the launcher’s performances.
1.3 Objectives
This thesis addresses several challenges concerning the control in closed-loop of thrust and mixture
ratio of a liquid-propellant rocket engine:
1. Modelling: obtaining a low order physical linear model of the engine constitutes one of the critical
aspects of this thesis; an analytic explicit form of a state-space model will be sought out.
2. Model analysis:
(a) Model validation over the operating domain;
(b) Determining the engine’s components responsible for the dominant modes;
(c) Analysing the effects of parameter uncertainties on the poles and zeros of the system;
(d) List the engine design parameters constraining the implementation of a control law;
3. Control law implementation: implementing and validating a robust control law capable of
maintaining with precision a desired equilibrium point and of transitioning towards a low-thrust
equilibrium point while respecting the established requirements;
Above all, the main goal is to establish a methodology easily applicable to different engines. As a
starting point, we use the European VINCI engine as a study-case.
1.4 Previous Work
LPRE’s with a varying thrust profile have been studied since the 1930’s. Prior to this period these
engines worked essentially at constant thrust. However, in the second half of this decade, German
5
researchers incorporated for the first time a manual throttling system in an LPRE that partially powered
a German Heinkel He 112 fighter aircraft. After this pioneer work, research was mainly focused on
”applicability to missile defense, weapons systems, and then space vehicles” [6].
However efficient the throttling technique is, there are other physical parameters that can be controlled
in order to obtain varying thrust. Several of these concepts were developed in the 1960’s and are described
in [7]. Varying the propellant flow rates is nonetheless the simplest way of controlling both mixture ratio
and thrust and it is the focus of this thesis.
This concept was demonstrated both in the LMDE and, later on, in the SSME. A renewed interest
in this technique arose recently with the prospect of enhancing performances of current launchers but
also with the objective of developing partially reusable launching systems. While recovering the first
stage of a satellite launcher may not be cost efficient, it allows companies to store multiple launchers and
readily respond to an eventual peak in demand which would otherwise be impossible to satisfy. There
are however limited references in the open literature on modelling and controller design for LPRE’s.
Simplified linear models around an equilibrium point are presented in [10] and [11]. These are not
very accurate mathematical models of the subsystems of an LPRE but their linear, time-invariant nature
is essential to apply known linear controller design techniques. In [12] the authors describe a model
identification technique for the SSME. Pseudorandom binary sequences are used as driving signals to
excite all modes of the system and a recursive maximum likelihood method algorithm is applied in order
to determine the transfer function coefficients for a linear model around an equilibrium point. Given that
the order of the system is unknown, parameters are estimated for models of increasing order until the
total estimation error converges to a minimum. In [13], the least squares technique is used to determine
a state-space formulation of the linearized system for the same engine.
The control of the mixture ratio and thrust of an LPRE is composed of two control loops, one for
each of the outputs. These control loops may be coupled or decoupled [14], and the control strategies
may rely on a linear or non-linear approaches.
In [15] the authors discuss the implementation of an integral and proportional-integral control strategy
for the Japanese LE-X cryogenic booster engine. In [11] a proportional-derivative-integral (PID) controller
is tested against a fuzzy logic controller in an academic simplified model of an LPRE constituted of 1st
order ordinary differential equations. Both are found to have acceptable performances although the PID
displays better performance.
In [14], a complete methodology based on ordinary describing function (DF) techniques for control
of an LPRE is presented. It discusses model identification around an operating point of interest which
should be previously characterized by the range of expected amplitudes and frequencies of excitation
signals. Moreover it highlights that DF techniques are able to handle discontinuities or multivalued
nonlinear terms whereas straight linearization fails in these cases. In [16] the same authors couple the
DF approach with factorization theory for controller design.
A non-linear state-space model linearization approach is described in [17]. After obtaining an 18 states
small signals model of the rocket engine, the Hankel model order reduction technique is applied to obtain
a 13 states reduced model. In this case, the authors seek to minimize damage to key subsystems of the
6

engine such as the turbines. Therefore, an H∞ approach is used to obtain a controller that minimizes
the energy between the perturbations and the regulated outputs as well as the oscillations during the
transient response. Moreover, a Life-Extending outer control loop is added which incorporates a non-
linear damage predicting model and a controller that minimizes the damage by employing a non-linear
programming technique known as Sequential Quadratic Programming. In [18] the same authors build on
this concept and present a more detailed account of this methodology.
1.5 Thesis Outline
Chapter 2 introduces the necessary propulsion fundamentals to understand the work principle of a
liquid-propellant rocket engine. Subsequently the main engine subsystems are introduced and briefly
described.
Chapter 3 briefly describes some elements of control theory that are required in the implementation
and analysis of the engine models as well as in the control of the VINCI engine. We start by formalizing
the linearization of a generic state-space model. The least-squares method for model identification is
then introduced, followed by a brief description of the matched DC gain reduction method. We proceed
to define the concepts of controllability and observability and wrap up the chapter addressing the use
of singular values to describe the behaviour of multiple-input multiple-output (MIMO) systems in the
frequency domain as well as a brief account of some considerations regarding robustness analysis.
Chapter 4 provides an overview of the VINCI engine characteristics, namely of its thermodynamic
cycle and of the available mechanisms to control the mixture ratio and the chamber pressure. It then
proceeds to present the analytic linear model of that same engine and its corresponding state-space
formulation.
Chapter 5 starts by addressing the implementation and analysis of the complete and reduced analytic
linear models. We then proceed to explain the need to obtain an identified linear model, both complete
and reduced, and validate the least-squares method as a model identification algorithm. A comparison is
drawn between the four analytic models and the reduced identified linear model is retained for controller
design. We finish the chapter by studying the effect of several design parameters over the dynamics of the
system. Conclusions are drawn regarding the dominant modes and the components that govern them.
Chapter 6 defines the control specifications to be met by the closed-loop system.
Chapter 7 describes the approach to design, implement and validate a modified PID controller. We
then characterize the obtained closed-loop in terms of closed-loop poles, modulus margin and frequency
response.
Chapter 8 concludes the present work by presenting the results of a simplified flight simulation on
the complete non-linear model of the VINCI engine as well as a robustness study against parametric
uncertainties and failure events.
7

8
Chapter 2
Liquid-propellant Engines
In this chapter the process through which one produces thrust is explained and some of the funda-
mental equations of rocketry are presented. The major subsystems of a liquid-propellant rocket engine
are briefly described and their importance to the overall engine architecture is outlined.
The propulsion fundamentals are explained extensively in [2] and [19], over which this chapter is
largely based on. Engine design and its major subsystems are described in detail in [19].
2.1 Propulsion Fundamentals
The principal function of a chemical rocket propulsion system is to generate a propulsive force - thrust
- by converting chemical energy stored in the propellants into kinetic energy of the gaseous combustion
products with maximum efficiency. The first step of this conversion occurs in the combustion chamber
where the chemical energy is converted into thermal energy with an associated efficiency - ηcomb. The
resulting high temperature, high pressure gases tend to expand and be ejected at high speeds through
the nozzle - thermal energy is converted into kinetic energy with an efficiency coefficient ηexp . According
to the third law of motion, the momentum conservation imparts a force in the rocket which is formalized
in equation 2.1.
F = mvnozzle + (pnozzle − patm)Snozzle (2.1)
where m is the total mass flow exiting the nozzle, vnozzle is the matter ejection velocity relative to
the vehicle, pnozzle is the pressure of the gases at the exit of the nozzle, patm is the atmospheric pressure
and Snozzle is the section of the nozzle outlet. The first term is the momentum thrust whereas the second
term is commonly called the pressure thrust. The latter arises from the exerted force by the surrounding
fluid in which the rocket is immersed. There are three important considerations to make at this point:
1. Since the atmospheric pressure is a decreasing function of altitude, thrust will increase during the
ascent. Typical values point to a 10-30% overall thrust change due to altitude variations [2];
2. In vacuum, or at sufficiently high altitudes, atmospheric pressure is considered to be negligible and
9

thrust becomes maximal: F = mvnozzle + pnozzleSnozzle;
3. Rocket nozzles can be designed to have pnozzle = patm, in which case we say the nozzle has an
optimum expansion ratio. Obviously this relation can not hold throughout the whole flight due
to altitude and atmospheric pressure variations. But the overall importance of the pressure thrust
over the total thrust is highly reduced and even in some cases negligible [2].
For a bipropellant engine the total mass flow rate can be expressed as the sum of the mass flow rates
of each of the propellants at the chamber inlet:
m = moxi + mfuel (2.2)
The mixture ratio is defined as the ratio between the mass flow rate of the oxidizer and that of the
fuel:
MR =moxi
mfuel(2.3)
In the convergent-divergent nozzle thermal energy is converted into kinetic energy. Ideally there are
no normal shock waves nor discontinuities and the overall losses - including due to wall friction - are
small. The flow is rapidly accelerated and there is an extreme pressure drop along both parts of the
nozzle. Moreover, the flow is considered to be isentropic, which implies that it is thermodynamically
reversible, and supersonic. At the inlet, which in a one-dimensional model coincides with the combustion
chamber, the propellants are considered to be perfectly mixed and homogeneous. At the outlet, the flow
is considered to be axial and uniform.
One can therefore re-write equation 2.1 in terms of the combustion chamber gas state and of the nozzle
geometric characteristics. Let us assume that we are operating at optimal conditions - pnozzle = patm.
Under these conditions,
F = mvnozzle = ρtStvtvnozzle (2.4)
where the subscript t stands for the throat of the nozzle, at which point the flow is chocked and sonic.
Isentropic flow conditions allow us to write the following equation presented in [19] as
vnozzle =
√2κ
κ− 1RTchmb(1− (
pnozzlepchmb
)κ−1κ ) + v2
chmb (2.5)
where κ is the real gas specific heat ratio, R is the ideal gas constant for the mixture of propellants,
Tchmb and pchmb are the combustion chamber temperature and pressure respectively and vchmb is the
nozzle inlet velocity. But because the chamber section is extremely large compared to the throat of the
nozzle, vchmb can be neglected, yielding
vnozzle =
√2κ
κ− 1RTchmb(1− (
pnozzle
pchmb)κ−1κ ) (2.6)
Density is given by
10

ρt = ρchmb
(κ+ 1
2
) 11−κ
(2.7)
, whereas velocity is obtained from
vt =
√2κ
κ+ 1RTchmb (2.8)
Substituting equations 2.6, 2.7 and 2.8 into equation 2.4 and using the ideal gas law in the combustion
chamber we obtain:
F = Stpchmb
√√√√ 2κ2
κ− 1
(2
κ+ 1
) κ+1κ−1
[1−
(pnozzle
pchmb
)κ−1κ
](2.9)
The pressure ratio across the nozzle can be calculated, when at optimal conditions, through equation
2.10, which will not be demonstrated here. The interested reader is directed to [2].
StSnozzle
=
(κ+ 1
2
) 1κ−1
(pnozzle
pchmb
) 1κ
√√√√κ+ 1
κ− 1
[1−
(pnozzle
pchmb
)κ−1κ
](2.10)
These results are very important because they demonstrate that thrust is only a function of the throat
area St, the chamber pressure pchmb, the specific heat ratio κ and the pressure ratio across the nozzle
pnozzle/pchmb. This means that for constant mixture ratio, and therefore constant specific heat ratio, and
constant pressure ratio across the nozzle, thrust is proportional to chamber pressure. In what concerns
the pressure ratio across the nozzle, at optimal conditions, it depends solely on the geometry of the nozzle
itself and on the specific heat ratio, as formulated on equation 2.10. Controlling thrust thus becomes
equivalent to controlling chamber pressure.
The specific impulse Is is defined as the total impulse per unit weight of propellant in equation 2.11.
Is =
∫ t0Fdt
g0
∫mdt
(2.11)
where g0 is the acceleration of gravity at sea level. This is one of the most important parameters when
evaluating the performance of a rocket - it provides insight into how efficiently the available propellant
mass is ”converted” into a propulsive force. Typical values for liquid-propellant rocket engines range from
300-450 with the SSME having 453.5 [7]. For constant thrust and mass flow rate it can be redefined as
Is =F
g0m(2.12)
It can thus be interpreted as the generated force per unit of weight flow rate. Although it will not
be demonstrated here, for a given thrust level there exists an optimal mixture ratio at which the specific
impulse is maximum [2].
As previously mentioned, every energy conversion process in the propulsive system has an associated
efficiency. The combustion efficiency ηcomb can be defined as:
11

ηcomb =Pthermal
Pchem=Pthermal
mQR(2.13)
where Pthermal is the available thermal power, Pchem is the available chemical power and QR is the
energy available per unit mass of chemical propellant. This efficiency is generally high, approximately
94-99% [2].
The conversion from thermal to kinetic energy also has an associated efficiency defined as:
ηexp =Pkin
Pthermal=
12mv
2nozzle
ηcombPchem(2.14)
where Pkin is the available kinetic power. This efficiency is generally under 40%.
2.2 Engine Work Principle and Classification
As mentioned in the previous section, the purpose of an LPRE is to convert chemical energy into
kinetic energy, or equivalently into propulsive power, with maximum efficiency. Six major subsystems
take part in this conversion process and form the engine as a whole. Their description below is based on
[19]. The first four subsystems are represented in figure 2.1.
1. Thrust-chamber assembly;
2. Propellant feed system;
3. Turbine-drive system;
4. Propellant control system;
5. Electric and pneumatic controller systems;
6. Thrust-vector control system (TVC);
Thrust-chamber Assembly
The thrust-chamber assembly is probably the most critical subsystem in terms of performance. The
combustion chamber receives at its inlet high pressure propellants provided by the propellant feed system.
Within it, mixture, ignition and basically the whole combustion process takes place. The combustion
products are then expelled at high temperatures and speeds through a convergent-divergent nozzle.
While the combustion chamber is responsible for converting chemical energy into thermal energy, the
nozzle is equally important in converting the enthalpy of the combustion gases into kinetic energy. In
nominal conditions, the gases are accelerated to sonic speeds at the throat of the nozzle, the minimal
section point, and then further accelerated by the divergent section to supersonic speeds. However, for a
particular design, there is only one value of ambient pressure for which an ideal expansion occurs. That
is to say that for chocked flow at the throat of the nozzle, where Mach number equals 1, if the ambient
pressure does not match the exit pressure for those particular flow conditions, a pressure recovery must
12
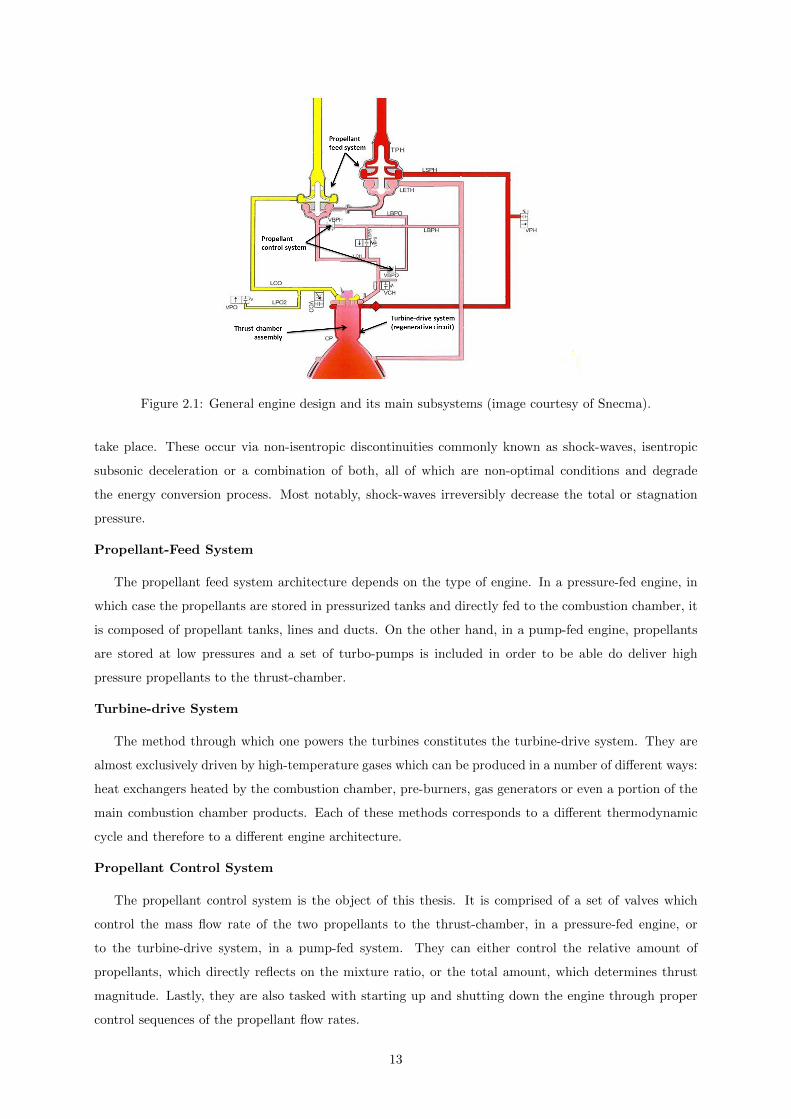
Figure 2.1: General engine design and its main subsystems (image courtesy of Snecma).
take place. These occur via non-isentropic discontinuities commonly known as shock-waves, isentropic
subsonic deceleration or a combination of both, all of which are non-optimal conditions and degrade
the energy conversion process. Most notably, shock-waves irreversibly decrease the total or stagnation
pressure.
Propellant-Feed System
The propellant feed system architecture depends on the type of engine. In a pressure-fed engine, in
which case the propellants are stored in pressurized tanks and directly fed to the combustion chamber, it
is composed of propellant tanks, lines and ducts. On the other hand, in a pump-fed engine, propellants
are stored at low pressures and a set of turbo-pumps is included in order to be able do deliver high
pressure propellants to the thrust-chamber.
Turbine-drive System
The method through which one powers the turbines constitutes the turbine-drive system. They are
almost exclusively driven by high-temperature gases which can be produced in a number of different ways:
heat exchangers heated by the combustion chamber, pre-burners, gas generators or even a portion of the
main combustion chamber products. Each of these methods corresponds to a different thermodynamic
cycle and therefore to a different engine architecture.
Propellant Control System
The propellant control system is the object of this thesis. It is comprised of a set of valves which
control the mass flow rate of the two propellants to the thrust-chamber, in a pressure-fed engine, or
to the turbine-drive system, in a pump-fed system. They can either control the relative amount of
propellants, which directly reflects on the mixture ratio, or the total amount, which determines thrust
magnitude. Lastly, they are also tasked with starting up and shutting down the engine through proper
control sequences of the propellant flow rates.
13

As explained in section 1.2, vehicle performance, namely safe engine operation and minimum propel-
lant outage, is maximized when working at a specific thrust level and mixture ratio. At a steady state
regime, these two parameters can either be controlled in open or closed-loop depending on the desired
accuracy.
Electric and Pneumatic Controller Systems
The above-mentioned valves are either electrically or pneumatically controlled. Pneumatic controllers
use Helium, also used for tank pressurization, to power the actuators. This solution is reliable and cost-
effective for sporadic stepwise valve adjustment in an open-loop look-up table control approach. However,
if one is interested in a closed loop active continuous control throughout the whole flight duration, electric
controller systems are more cost effective.
TVC
The thrust-vector control system tilts the engine in order to provide directional control. It is used in
the guidance control system.
2.2.1 Liquid Propellants
The propellant is the source of energy of the engine. Its choice is of major importance in the design
for it affects overall performance, total cost and structure architecture. Some other aspects to take into
account when selecting the propellant include price, supply, storage conditions, pollution, health, and
safety.
According to the type and number of used liquid propellants, there are multiple classifications. Firstly,
an engine may run on a single propellant - mono-propellant - which is often a mixture of an oxidizer and
a fuel. These engines are simpler, particularly the propellant feed system and the turbine drive system,
but also under-perform when compared to a bi-propellant engine. These employ an oxidizer and a fuel
which are stored separately, for instance oxygen and hydrogen. If their mixture ignites spontaneously
then the combination is called hypergolic. Otherwise the thrust-chamber must possess an ignition system
to set off the combustion. This thesis focuses solely on bi-propellant engines such as the VINCI engine.
Moreover if a propellant can be stored at ambient temperature and pressure it is called earth-storable.
These are simpler to handle for obvious reasons. In contrast, cryogenic propellants are liquefied gases
which have very low boiling points and therefore require special storage conditions. The most common
example is LOX and LH2.
14

2.3 Summary
In this chapter important expressions to calculate thrust were presented. Mixture-ratio, our second
quantity of interest, was defined. The equivalence between thrust and chamber pressure at constant
mixture ratio and at optimal conditions was demonstrated. The work principle of a liquid-propellant
rocket engine, along with a brief description of its major subsystems, was then presented. A classification
system in function of the liquid propellants’ characteristics and of the propellant-feed system was also
discussed.
15

16

Chapter 3
Elements of Control Theory
In this chapter several elements of control theory are addressed.They are particularly useful to un-
derstand the determination and analysis of a low order physical linear model of the VINCI engine. We
start by formalizing the linearization theory of non-linear state-space models about an equilibrium point.
Afterwards we introduce the least-squares method for linear state-space models identification [20]. We
then proceed to formalize the matched DC gain method for model reduction, one of the known few which
allows us to keep a model with physical meaning. The controllability and observability concepts and
matrices are then introduced [21]. A definition of the singular value decomposition, its properties and
how it can be used to determine the modulus margin and therefore characterize stability and robustness
of MIMO systems is presented [21]. Lastly a brief account of model uncertainty sources is provided [21].
3.1 State-space Model Linearization
A system is said to be in state variable form if its dynamic model is described by n first order
differential equations and p algebraic equations of the form
x1 = f1(x1, ..., xn, u1, ..., um)
x2 = f2(x1, ..., xn, u1, ..., um)...
xn = fn(x1, ..., xn, u1, ..., um)
y1 = g1(x1, ..., xn, u1, ..., um)...
yp = gp(x1, ..., xn, u1, ..., um)
(3.1)
, where x = [x1, ..., xn]T is the state vector, u = [u1, ..., um] the control input and [y1, ..., yp] the control
output. Functions f = [f1, ..., fn]T and g = [g1, ..., gp]T are generally non-linear, as is the case of the
VINCI engine. However, in order to be able to apply known linear control techniques, one can generally
describe the behaviour of a non-linear system in the vicinity of a system configuration called equilibrium
point with a linear model given by
17

x = Ax+Bu
y = Cx+Du(3.2)
Matrix A has dimensions n× n, B is n×m, C is p× n and D is p×m.
Definition 3.1.1. Equilibrium point Let us consider a system in the state-space form 3.1 and a constant
input u. Then if f(x, u) = 0, x is said to be an equilibrium point of the system.
The state-space form can be approximated by a first-order Taylor expansion around any equilibrium
point, yielding the linear model
∆x = A∆x+B∆u
∆y = C∆x+D∆u(3.3)
, where ∆x denotes x− x, ∆u denotes u− u and ∆y denotes y− y. Matrices A,B,C,D are expressed
as:
A =
[∂f
∂x
]x,u
=
∂f1∂x1
(x, u) . . . ∂f1∂xn
(x, u)...
. . ....
∂fn∂x1
(x, u) . . . ∂fn∂xn
(x, u)
B =
[∂f
∂u
]x,u
=
∂f1∂u1
(x, u) . . . ∂f1∂un
(x, u)...
. . ....
∂fn∂u1
(x, u) . . . ∂fn∂un
(x, u)
C =
[∂g
∂x
]x,u
D =
[∂g
∂u
]x,u
It is worth mentioning that, for a particular application, the linearization is only valid in a sufficiently
small domain around the equilibrium point, the extent of which may be difficult to estimate. A possible
approach would be to determine the second-order term of the Taylor expansion which, for high-order
systems, may become impractical.
3.2 Model Identification
System identification methods are a class of techniques which allow us to build mathematical models
of dynamic systems using measured data. These techniques may either rely on known dynamic laws of
the system or solely on input-output behaviour without any knowledge of the dynamic states or of the
governing equations of the system. Their application can also either be in the time-domain or in the
frequency-domain.
18

In this section we will introduce and formalize the least-squares method for model identification. This
method, alongside the analytic approach, will take part in our quest for a low-order physical linear model
of the VINCI engine.
3.2.1 Least-squares Method
Often in the world of physics we expect to find linear relationships between variables. Seldom, however,
are these relations perfectly linear due to experimental errors and, frequently, to approximately linear
phenomenons. Nonetheless, in order to simplify our models, we look to establish ”the best” linear fit
to the observed data. The least-squares method defines and quantifies what the best fit is and offers a
solution to this common problem [22].
Let us consider the example of a discrete state-space linear model:
xk+1 = Axk +Buk
yk = Cxk +Duk(3.4)
This model can be rearranged in the following form:
[xTk+1 yTk
]=[xTk uTk
] AT CT
BT DT
If written for k = 1, ...N , then we obtain
Y = ΘM ⇔
xT2 yT1...
...
xTN+1 yTN
=
xT1 uT1...
...
xTN uTN
AT CT
BT DT
, which for N greater than the number of states of the system becomes an overdetermined system.
The least-squares approach consists of finding the solution which minimizes the error function
E =‖ ΘM − Y ‖2 (3.5)
Calculating the gradient of this function and imposing ∂E∂M = 0 to obtain the minima
M = (ΘTΘ)−1ΘTY (3.6)
,which corresponds to the pseudo-inverse of matrix Θ multiplied by Y .
This method is often inadequate for model identification because it requires knowing both the order
and the states of the system. Contrarily, when this is known, it has the advantage of yielding a model
with the desired state-space base.
It is worth noting that, in the case of a linear state-space model, the least-squares solution error
asymptotically decreases with the sampling frequency. In order to completely capture the system’s
dynamics this frequency must respect Shannon’s theorem which states that the sampling frequency must
be at least twice as large as the natural frequency of the fastest mode.
19

3.3 Reduction Methods
With today’s need to model ever-increasingly complex physical phenomena in order to properly simu-
late a system’s behaviour, mathematical models have grown to be highly detailed. However, we often do
not need to model every single detail to capture the essentials of a system’s dynamics. This is particularly
true in linear control theory. More often than not, highly complex phenomena can be described by a
handful of dominant modes which are sufficient for control law design [23]. In fact, most of the available
techniques today require low-order models to be applicable in practice.
The process of obtaining a low-order model from a high-order complete model is commonly called
model order reduction. The following section focuses on a technique which uses physical insight to remove
model states while preserving input-output behaviour, particularly at low frequencies.
3.3.1 Matched DC Gain Method
Let us consider the classical linear time-invariant state-space model formulation:
x = Ax+Bu
y = Cx+Du(3.7)
The state-vector x can be decomposed as x = [xnr, xr]T , where xnr constitutes the set of states to be
kept and xr the set of states to be eliminated. The state-space model thus becomes:
˙ xnr
xr
=
A11 A12
A21 A22
xnr
xr
+
B1
B2
u
y =
C11 C12
C21 C22
xnr
xr
+
D1
D2
u(3.8)
Assuming the dynamics of xr to be infinitely fast, then xr ≈ 0 and the model can be rewritten as:
xnr = (A11 −A12A−122 A21)xnr + (B1 −A12A
−122 B2)u
y =
(C11 − C12A−122 A21)
(C21 − C22A−122 A21)
xnr +
(D1 − C12A−122 B2)
(D2 − C22A−122 B2)
u (3.9)
The matched DC-gain method preserves the static gain of the original model. Therefore, it conserves
the model’s behaviour at low frequencies. When compared to other more sophisticated methods, it has
the advantage of conserving the state-space base, in other words, the reduced model can be interpreted
physically if the full model has an explicit physical-related state-vector. This is of first importance to
our objectives because it will allow us to determine which elements and physical parameters within the
engine play a significant role in the system’s dominant dynamics. One of its main disadvantages concerns
the choice of the set of states to be eliminated. That analysis has to be made on a model to model basis
and often relies on physical insight of the dynamics of the system.
20
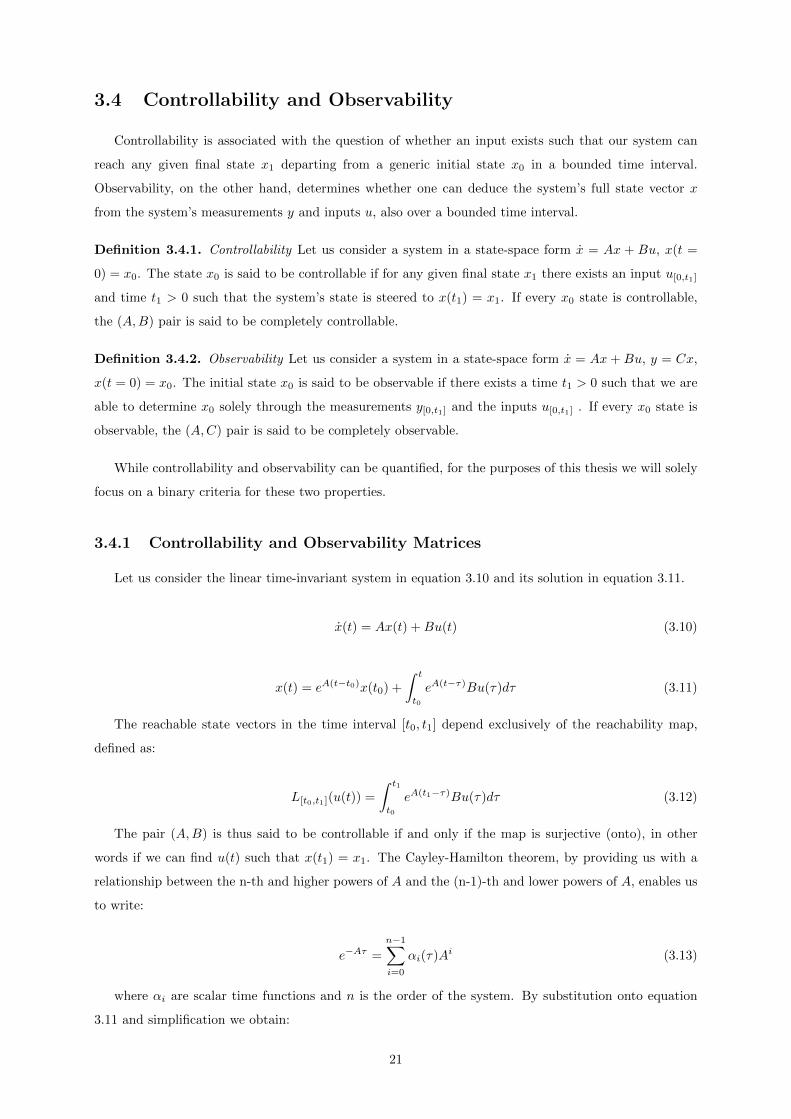
3.4 Controllability and Observability
Controllability is associated with the question of whether an input exists such that our system can
reach any given final state x1 departing from a generic initial state x0 in a bounded time interval.
Observability, on the other hand, determines whether one can deduce the system’s full state vector x
from the system’s measurements y and inputs u, also over a bounded time interval.
Definition 3.4.1. Controllability Let us consider a system in a state-space form x = Ax + Bu, x(t =
0) = x0. The state x0 is said to be controllable if for any given final state x1 there exists an input u[0,t1]
and time t1 > 0 such that the system’s state is steered to x(t1) = x1. If every x0 state is controllable,
the (A,B) pair is said to be completely controllable.
Definition 3.4.2. Observability Let us consider a system in a state-space form x = Ax + Bu, y = Cx,
x(t = 0) = x0. The initial state x0 is said to be observable if there exists a time t1 > 0 such that we are
able to determine x0 solely through the measurements y[0,t1] and the inputs u[0,t1] . If every x0 state is
observable, the (A,C) pair is said to be completely observable.
While controllability and observability can be quantified, for the purposes of this thesis we will solely
focus on a binary criteria for these two properties.
3.4.1 Controllability and Observability Matrices
Let us consider the linear time-invariant system in equation 3.10 and its solution in equation 3.11.
x(t) = Ax(t) +Bu(t) (3.10)
x(t) = eA(t−t0)x(t0) +
∫ t
t0
eA(t−τ)Bu(τ)dτ (3.11)
The reachable state vectors in the time interval [t0, t1] depend exclusively of the reachability map,
defined as:
L[t0,t1](u(t)) =
∫ t1
t0
eA(t1−τ)Bu(τ)dτ (3.12)
The pair (A,B) is thus said to be controllable if and only if the map is surjective (onto), in other
words if we can find u(t) such that x(t1) = x1. The Cayley-Hamilton theorem, by providing us with a
relationship between the n-th and higher powers of A and the (n-1)-th and lower powers of A, enables us
to write:
e−Aτ =
n−1∑i=0
αi(τ)Ai (3.13)
where αi are scalar time functions and n is the order of the system. By substitution onto equation
3.11 and simplification we obtain:
21

e−At1x1 − e−At0x0 =∑n−1i=0 (AiB)
∫ t1t0αi(τ)u(τ)dτ
=[B,AB,A2B, . . . , An−1B
]
∫ t1t0α0(τ)u(τ)dτ
...∫ t1t0αn−1(τ)u(τ)dτ
(3.14)
thus demonstrating that we can indeed find u(t) such that the equation is verified if and only if[B,AB,A2B, . . . , An−1B
]is invertible or, equivalently, if the controllability matrix has full row rank.
Let us consider an input-free system for the sake of conciseness whilst studying observability. In the
general case, the reasoning remains identical although the system’s input is then required in order to
determine the initial state of the system.
y(t0) = Cx(t0)
˙y(t0) = Cx(t0) = CAx(t0)...
yn−1(t0) = Cxn−1(t0) = CAn−1x(t0)
which can be rearranged in matrix form:
y(t0)
y(t0)...
yn−1(t0)
=
C
CA...
CAn−1
x(t0) (3.15)
Thus it can be concluded that the initial state of the system may be determined from its measurements
(and inputs should we consider the system’s input) in a finite time interval if and only if the observability
matrix[C;CA; . . . ;CAn−1
]is invertible or, equivalently, if it has full row rank. Moreover, adding higher-
derivatives does not increase the observability because the Cayley-Hamilton theorem guarantees that
higher than (n−1) powers of A can always be expressed in function of the first (n−1) powers. Therefore
these extra equations would be linearly dependent on the previously written ones.
3.5 Singular Values and Modulus Margin
The frequency response analysis is a very powerful tool to characterize the stability, performance
and robustness of a system. Several techniques and rules have been well established for the analysis of
single-input single-output (SISO) systems, namely the definition of gain and phase margins which can,
for example, be deduced from the Bode plot of the transfer function. These two concepts account for
the robustness of the system to uncertainty, perturbations or unmodeled dynamics. While the transfer
function frequency response can be directly generalized to MIMO systems by considering all different
transfer functions from each input to each output, the gain and phase margin concepts can not.
Let us consider the gain at a given frequency:
22
||y(ω)||2||u(ω)||2
=||G(jω)u(ω)||2||u(ω)||2
=
√y2
11 + y212 + ...√
u211 + u2
12 + ...(3.16)
Because the input and output are now vectors, we are obliged to introduce a norm. Moreover, the
gain, which in SISO systems depends solely on frequency, is now also a function of the direction of the
input but still independent of its magnitude. The introduction of the singular value decomposition (SVD),
rigorously defined below, allows us to extract useful information about the gain of the system despite the
introduction of the direction dependency.
Definition 3.5.1. Unitary matrix A complex matrix U is said to be unitary if and only if UH = U−1.
All of its eigenvalues and singular values have an absolute value equal to 1.
Consider an m× n transfer matrix G(jω) at a given frequency and its singular value decomposition:
G = UΣV H (3.17)
where Σ is an m × n matrix with k = min(m,n) real, non-negative singular values, σi, arranged in
descending order along its main diagonal; U is an m ×m unitary matrix of output singular vectors, ui,
forming an orthonormal bases for the output space; V is an n×n unitary matrix of input singular vectors,
vi, forming an orthonormal bases for the input space.
The input and output directions, ui and vi, are related through the singular values. Since V is unitary
then V HV = I and we can thus write:
Gvi = σiui (3.18)
which means that if we consider an input in the direction vi, we obtain an output in the direction ui
and, given that both vectors have a unitary norm, σi directly represents the gain of the system in this
particular direction. Most notably, it can be shown that for a given frequency, the maximum gain for
any input direction corresponds to the maximum singular value:
maxu6=0
||Gu||2||u||2
= σ(G(jω)) (3.19)
Inversely, the smallest gain for any input direction is equal to the minimum singular value:
minu6=0
||Gu||2||u||2
=¯σ(G(jω)) (3.20)
The modulus margin, the only one that can be generalized to MIMO systems, is defined as the smallest
distance from the open-loop frequency-domain response L(jω) = G(jω)K(jω) to the critical point and
can be measured by the radius r of the circle centered on the critical point and tangent to the L(jω)
response:
r = minω|1 +G(jω)K(jω)| (3.21)
23

which for MIMO systems can be reformulated as:
r = minω ¯σ(I +G(jω)K(jω)) (3.22)
Let us consider the inverse of a non-singular square matrix A:
A−1 = V Σ−1UH (3.23)
We immediately obtain the SVD of A−1 with the singular values arranged in ascending order. One
can therefore conclude that:
σ(A−1) =1
¯σ(A)
(3.24)
Thus enabling us to rewrite equation 3.22
r = minω
1σ(I+G(jω)K(jω))−1
1r = max
ωσ(I +G(jω)K(jω))−1 = ||S(s)||∞
(3.25)
,S(s) being the output sensitivity transfer function and || · ||∞ the H-infinity norm, defined, for stable
systems, to be the maximum gain among all frequencies and input directions - and therefore the maximum
of the maximum singular value for MIMO systems.
It is important to highlight that the determination of the modulus margin, as well as the use of other
analysis tools, requires the correct scaling of the system so as to have output errors with comparable
magnitudes. A proper way to do so involves dividing each variable by its maximum expected or allowed
value, which makes them less than one in magnitude.
u = Usclu =
umax
1 . . . 0...
. . ....
0 . . . umaxl
u1
...
ul
(3.26)
where u is the scaled variable, Uscl is a diagonal scaling matrix, u is the original vector and l its length.
When scaling the inputs and outputs of a state-space representation one obtains:
x = Ax+BUsclu
y = Y −1scl Cx+ Y −1
0 DUsclu(3.27)
3.6 Robustness Analysis
Control laws are often based on a single dynamic model of the system, e.g the nominal plant model. In
reality, it is inevitable, however, that there is a mismatch between the theoretical model upon which our
control law was based and the actual system. Consequently, it is a fundamental step of controller design
to ensure that stability and performance are insensitive to these uncertainties. Hereafter we present an
extensive list of uncertainty sources:
24

1. Non-linearities are often not taken into account in the control design method and may therefore have
an important impact on stability and performance of the closed-loop system; Common examples
include saturations, backlash and time delays.
2. Unmodelled dynamics, particularly at high frequencies due to numerical limitations of the identifi-
cation methods, or even caused by simplification of the dynamic equations modelling the system.
3. Uncertainty over parameters describing the system, whether because they evolve during operation,
because a precise measurement is impractical or simply because the fabrication of two components
of the same kind never yields the same exact result.
4. Changing operating conditions, particularly when the controller design process is based on the
linearization of the system around an equilibrium point.
5. Failure events during operation may cause drastic and sudden parameter variation.
The key idea is to guarantee that despite the whole set of uncertainties, even in the worst-case scenario,
stability and performance of the closed-loop are still guaranteed. Several approaches to resolve this
problem are available, featuring in particular the µ analysis developed in the H∞ framework. Nonetheless,
due to the number of uncertain parameters and the complexity of our system, this strategy was found
to be inadequate. Moreover, because the system is naturally stable, this complex and heavy method is
expected to add little value to the analysis.
We will thus focus on the multi-model approach in order to handle parametric uncertainties which
are the greatest source of uncertainty of the VINCI engine model. A finite set of perturbed linear models
- the uncertainty set - will be generated according to criteria to be defined in chapter 8. Stability and
performance will be evaluated over this set. The main disadvantage of this approach is that it gives us
no indication on how to generate the uncertainty set nor does it guarantee us to cover the worst-case.
On the other hand, it facilitates handling a high number of independent parameter uncertainties.
3.7 Summary
In this chapter important methods and concepts to the remainder of this thesis were introduced.
Firstly, a state-space model linearization technique was introduced. The least-squares method was for-
malized as an identification method to obtain a discrete state-space model of a system. A reduction
method which preserves the state-space base and the low frequency behaviour of the system was pre-
sented. The concepts of controllability and observability were introduced. Then the SVD was formalized
and its practical application for determining the modulus margin was presented. Lastly we focused on
sources of model uncertainty and we gave a very brief overview of possible methods to analyse a system’s
robustness.
25

26

Chapter 4
VINCI Engine
In this chapter an in-depth explanation of the thermodynamic cycle of the VINCI engine will be
provided, followed by an overview of the available actuators to perform the closed-loop control and
culminating with the presentation and linearisation of the governing equations of the engine. Lastly the
equations are assembled to form a linear state-space model about an equilibrium point.
4.1 Introduction
The VINCI engine is expected to power the upper stage of the Ariane 6 launcher. Developed by
Snecma, it is a liquid-bipropellant pump-fed engine which uses LOX as an oxidizer and LH2 as a fuel,
both of which are cryogenic propellants. Its characteristics at nominal level are presented in table 4.1
[24].
The VINCI engine constitutes the first numerical application of the methodology to be developed
in this thesis. As described in section 1.3, among our objectives are the development of a linear model
enabling us to study the dominant dynamic modes of the system as well as the implementation of a
closed-loop controller of thrust and mixture ratio.
The most detailed in-house model of this engine was built using CARINS (unsteady network cal-
culator), a code developed by CNES (Centre National d’Etudes Spatiales)for rocket engine transient
modelling. Much like Simulink, this software allows us to describe a system with an assemble of blocks
or subsystems, each of which represents a component of the actual engine - for instance a turbine, a
pump or a cavity. There are, however, some specific rules to be applied when using CARINS. The system
must be causal and the governing equations must be explicit. This often induces the use of intermediate
parameters or fictional elements which do not arise from physical modelling but rather as a craftiness to
overcome the software’s limitations. Nonetheless, these will be discarded for our model is not constrained
by such limitations and will be purely a description of the physical laws that govern the elements of the
engine.
27
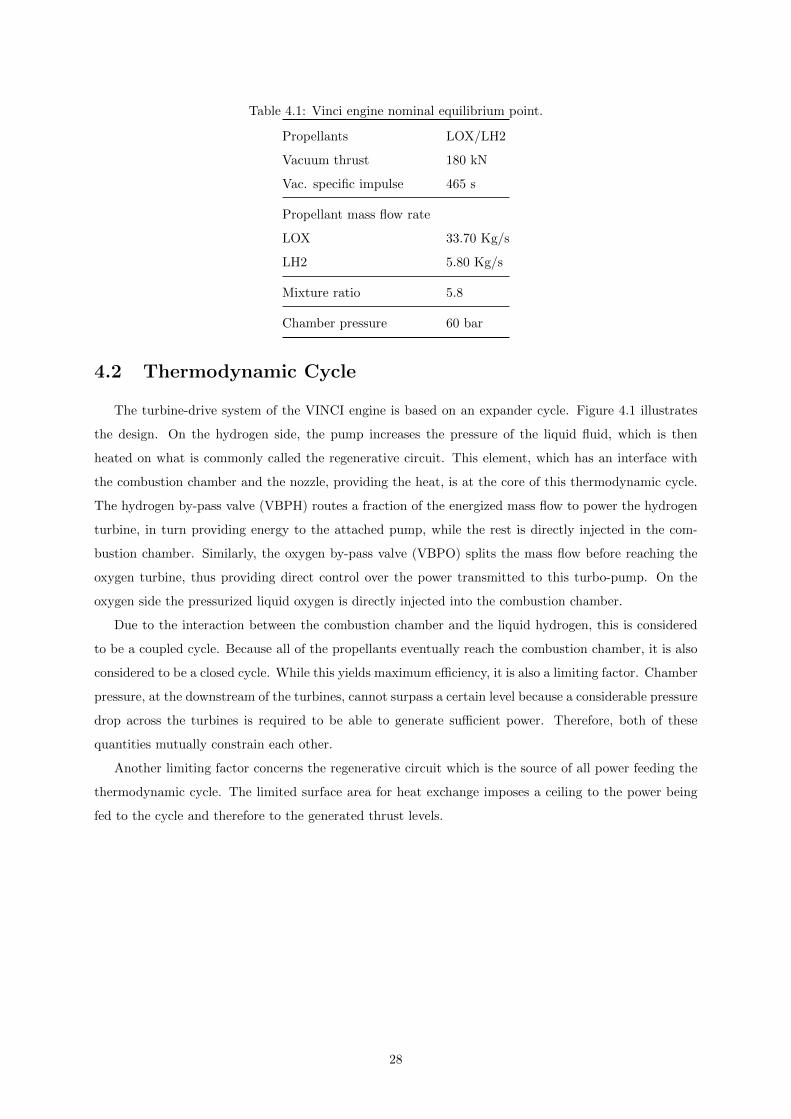
Table 4.1: Vinci engine nominal equilibrium point.
Propellants LOX/LH2
Vacuum thrust 180 kN
Vac. specific impulse 465 s
Propellant mass flow rate
LOX
LH2
33.70 Kg/s
5.80 Kg/s
Mixture ratio 5.8
Chamber pressure 60 bar
4.2 Thermodynamic Cycle
The turbine-drive system of the VINCI engine is based on an expander cycle. Figure 4.1 illustrates
the design. On the hydrogen side, the pump increases the pressure of the liquid fluid, which is then
heated on what is commonly called the regenerative circuit. This element, which has an interface with
the combustion chamber and the nozzle, providing the heat, is at the core of this thermodynamic cycle.
The hydrogen by-pass valve (VBPH) routes a fraction of the energized mass flow to power the hydrogen
turbine, in turn providing energy to the attached pump, while the rest is directly injected in the com-
bustion chamber. Similarly, the oxygen by-pass valve (VBPO) splits the mass flow before reaching the
oxygen turbine, thus providing direct control over the power transmitted to this turbo-pump. On the
oxygen side the pressurized liquid oxygen is directly injected into the combustion chamber.
Due to the interaction between the combustion chamber and the liquid hydrogen, this is considered
to be a coupled cycle. Because all of the propellants eventually reach the combustion chamber, it is also
considered to be a closed cycle. While this yields maximum efficiency, it is also a limiting factor. Chamber
pressure, at the downstream of the turbines, cannot surpass a certain level because a considerable pressure
drop across the turbines is required to be able to generate sufficient power. Therefore, both of these
quantities mutually constrain each other.
Another limiting factor concerns the regenerative circuit which is the source of all power feeding the
thermodynamic cycle. The limited surface area for heat exchange imposes a ceiling to the power being
fed to the cycle and therefore to the generated thrust levels.
28
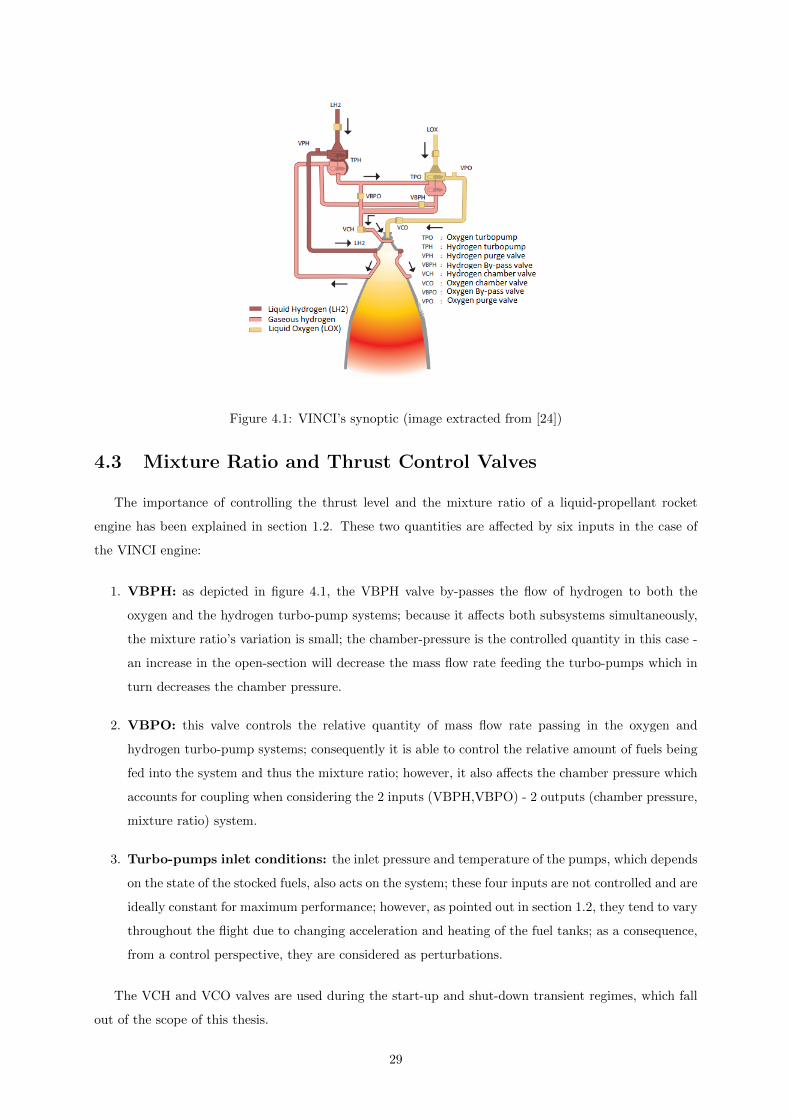
Figure 4.1: VINCI’s synoptic (image extracted from [24])
4.3 Mixture Ratio and Thrust Control Valves
The importance of controlling the thrust level and the mixture ratio of a liquid-propellant rocket
engine has been explained in section 1.2. These two quantities are affected by six inputs in the case of
the VINCI engine:
1. VBPH: as depicted in figure 4.1, the VBPH valve by-passes the flow of hydrogen to both the
oxygen and the hydrogen turbo-pump systems; because it affects both subsystems simultaneously,
the mixture ratio’s variation is small; the chamber-pressure is the controlled quantity in this case -
an increase in the open-section will decrease the mass flow rate feeding the turbo-pumps which in
turn decreases the chamber pressure.
2. VBPO: this valve controls the relative quantity of mass flow rate passing in the oxygen and
hydrogen turbo-pump systems; consequently it is able to control the relative amount of fuels being
fed into the system and thus the mixture ratio; however, it also affects the chamber pressure which
accounts for coupling when considering the 2 inputs (VBPH,VBPO) - 2 outputs (chamber pressure,
mixture ratio) system.
3. Turbo-pumps inlet conditions: the inlet pressure and temperature of the pumps, which depends
on the state of the stocked fuels, also acts on the system; these four inputs are not controlled and are
ideally constant for maximum performance; however, as pointed out in section 1.2, they tend to vary
throughout the flight due to changing acceleration and heating of the fuel tanks; as a consequence,
from a control perspective, they are considered as perturbations.
The VCH and VCO valves are used during the start-up and shut-down transient regimes, which fall
out of the scope of this thesis.
29

The valves work in closed-loop. However, their development is ongoing and therefore their dynamic
model is not yet certain. For the purposes of this thesis, they will both be modelled with a first-order
transfer function followed by a rate limiter, which models the velocity saturation, a saturation, which
accounts for the maximum and minimum open section of the valves, and a dead band, which defines the
system’s resolution. Moreover, the valves are controlled in terms of geometric opening angle.
Shyd = CdSg (4.1)
Equation 4.1 defines the relation between the hydraulic section, Shyd, which is the input of our linear
state-space model, and the geometric section, Sg.
Cd = f(θ) (4.2)
The former is the effective section which holds the sonic and subsonic mass flow rate equations true.
They are related via the flow coefficient Cd which in turn is a non-linear function of the geometric angle
θ - equation 4.2.
θ = g(Shyd) (4.3)
This function is determined experimentally. Lastly, there is another non-linear function 4.3 relating
the geometric angle and the hydraulic section. This equation allows us to convert our commanded open-
section into a geometric opening angle.
1
SVBPHreal
1
SVBPHref
1-D T(u)
S to Ang
1-D T(u)
Ang to SRate Limiter
SVBPH
Equilibrium value
x' = Ax+Bu y = Cx+Du
First-order SaturationBacklash
Figure 4.2: VBPH Simulink block diagram
Figure 4.2 depicts the corresponding implementation for the VBPH without loss of generality. While
our model input and output are variational quantities of the desired and effective hydraulic open-sections
respectively, the dynamics actually act upon the total quantities, by summing and subtracting the equi-
librium point quantity at the input and output. The table look-up blocks use function 4.3 and its inverse
to convert an hydraulic section into a geometric angle and vice-versa.
Table 4.2: Characteristics of the ISFM valves (brushless motor) - confidential data.
VBPH VBPO
Velocity sat. (deg/s) - -
Angle sat. (deg) - -
Bandwidth (Hz) - -
Dead band (deg) - -
30

4.4 VINCI Governing Equations Linearization
A priori, it is known that we will have a 2× 2 MIMO system, with the chamber pressure and mixture
ratio as controlled outputs and the two valves’ sections as controlled inputs. As noted in section 4.2 the
VINCI engine has an expander thermodynamic cycle and is therefore coupled, which not only increases
the difficulty but also allows us to tackle a more general problem.
One of the objectives of this thesis is to obtain an analytic linear model of the VINCI engine around
the nominal equilibrium point. Our approach thus consists of linearizing the governing equations for each
of the elements that compose the engine around a generic operating point - for instance the pump, the
turbine and the combustion chamber. Because we don’t have access to an explicit non-linear state-space
formulation, it is not possible to simply calculate the gradients at the equilibrium point. Nor is it possible,
for that matter, to perform a numerical linearization of the non-linear model in CARINS. Recoding the
model equations in another tool was also out of scope due to the complexity of the full model, namely of
the combustion phenomena.
Several sub-systems participate in the modelling of the engine. Among them turbines, pumps, liquid
cavities, ideal gas cavities, liquid orifices, ideal gas orifices, adiabatic pipes, a regenerative circuit and a
combustion chamber (approximately 60 elements). Their governing equations, along with the necessary
hypothesis, assumptions and nomenclature, are confidential and will therefore not be presented here. An
exception is made for the adiabatic pipes so as to illustrate the developed work (model extracted from
CNES internal documentation).
The ideal gas law is used instead of the real gas tables. Density is supposed constant in liquid state.
The assembly of the linearized equations in order to obtain a classical linear state-space formulation
is discussed in the next section.
Adiabatic Pipes
Pipes transport the state of the flow and calculate solely the mass-flow rate at the exit of a cavity or
a cavity-like element. This model stands both for liquid and gas flows. Here is a list of hypothesis that
were made:
1. The diameter of the pipe is significantly smaller than its length;
2. The pipe has a constant cross section;
3. The flow is incompressible, adiabatic and isothermal;
Under these assumptions, the non-linear model which describes this element in CARINS is given by
equations 4.4.
dmdt = S
L (pe − ps − kp+12ρeS2 )m2
Ts = Te
ρs = ρe
(4.4)
where
31

• m is the mass flow rate;
• S is the cross open section;
• L is the length of the pipe;
• pe and ps are the input and output static pressures respectively;
• Te and Ts are the input and output temperatures respectively;
• ρe and ρs are the input and output flow densities respectively;
• kp is the pressure loss coefficient;
Which upon linearization becomes:
dδmdt = − (kp+1)m0
LSρe0δm− S
Lδps + SLδpe +
(kp0+1)m20
2SLρ2e0δρe
δTs = δTe
δρs = δρe
(4.5)
where the subscript 0 indicates a steady-state quantity and δ represents a variational quantity with
respect to the equilibrium point.
In the case of an adiabatic pipe, no further simplifications are required because the linear first-order
differential equation is already only a function of state variables. Both pressure and density at the inlet
and outlet are state variables of the cavity’s model, which is the component the pipes are connected to.
4.4.1 State-space Model Assembly
Having the linear equations that govern each of the components that model the VINCI engine, a
linear state-space formulation can be achieved. The first step is writing these equations for each of the
sub-systems of the model. Secondly, using Maple, a symbolical calculus tool, we omit every intermediary
variable which is not a state. For example, a cavity is described by two first-order differential equations in
terms of density and pressure. Its temperature, on the other hand, is computed using the ideal gas law and
might be an intervening variable in subsequent elements. Therefore, we seek to rewrite the temperature
as a function of density and pressure which in turn are state-space variables. These simplifications will
allow us to obtain a classical state-space form such as equation 3.2. It is important to mention that all of
these calculations are done symbolically so as to preserve in an explicit form the various dependencies.
Because there is no direct feed-through, the D matrix is null. The pressure and temperature at the inlet
of the pumps are included as inputs. Consequently we obtain a 6 inputs (2 controlled, 4 perturbations),
39 states and 2 outputs system, as shown in table 4.3 which sums up the linearization process. The
absence of certain numerical values is due to confidentiality terms. The validation of this model will be
discussed in chapter 5.
32
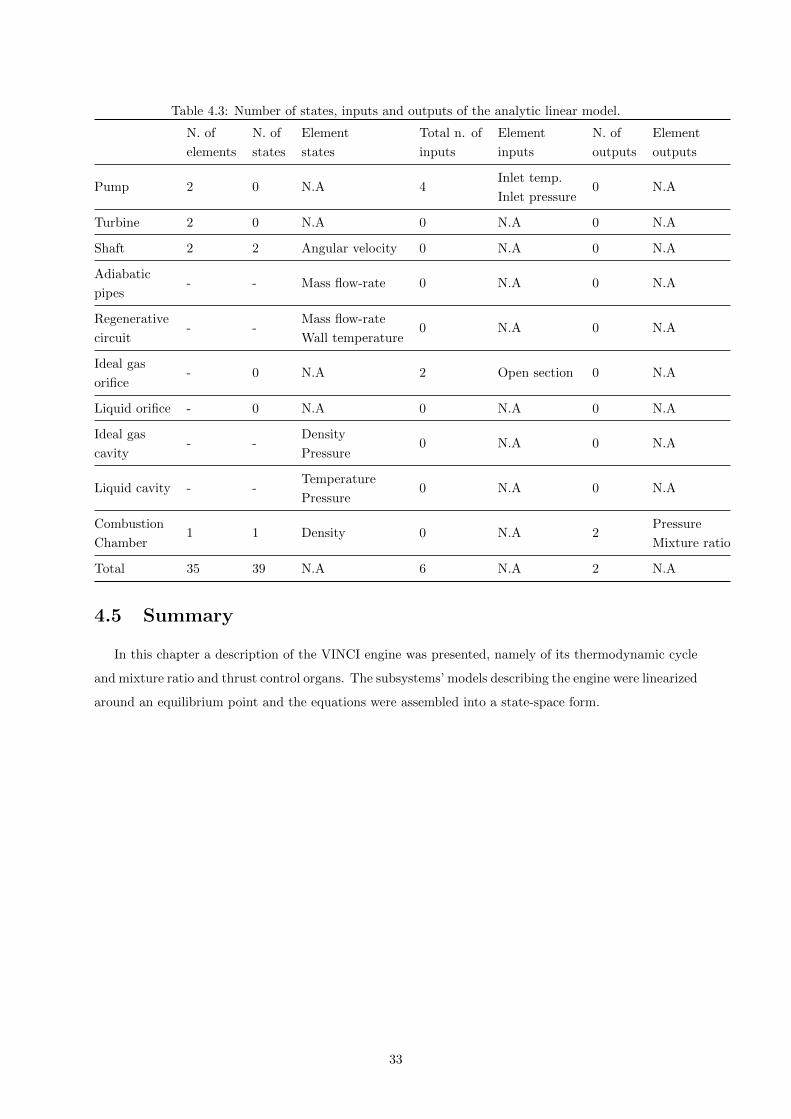
Table 4.3: Number of states, inputs and outputs of the analytic linear model.
N. of
elements
N. of
states
Element
states
Total n. of
inputs
Element
inputs
N. of
outputs
Element
outputs
Pump 2 0 N.A 4Inlet temp.
Inlet pressure0 N.A
Turbine 2 0 N.A 0 N.A 0 N.A
Shaft 2 2 Angular velocity 0 N.A 0 N.A
Adiabatic
pipes- - Mass flow-rate 0 N.A 0 N.A
Regenerative
circuit- -
Mass flow-rate
Wall temperature0 N.A 0 N.A
Ideal gas
orifice- 0 N.A 2 Open section 0 N.A
Liquid orifice - 0 N.A 0 N.A 0 N.A
Ideal gas
cavity- -
Density
Pressure0 N.A 0 N.A
Liquid cavity - -Temperature
Pressure0 N.A 0 N.A
Combustion
Chamber1 1 Density 0 N.A 2
Pressure
Mixture ratio
Total 35 39 N.A 6 N.A 2 N.A
4.5 Summary
In this chapter a description of the VINCI engine was presented, namely of its thermodynamic cycle
and mixture ratio and thrust control organs. The subsystems’ models describing the engine were linearized
around an equilibrium point and the equations were assembled into a state-space form.
33

34
Chapter 5
Model Implementation
In this chapter we discuss the implementation, analysis and validation of a linear model of the VINCI
engine, both complete and reduced. Firstly we present the analytic models, followed by the identified
models. A comparison between the four models is drawn. Lastly we perform a physical analysis of the
retained model.
Due to confidentiality terms, as a rule of thumb each graphic is adimensionalized using either its
maximum or minimum absolute value. Whenever direct comparisons between figures is necessary, a
common reference value for adimensionalization was used. When values are discussed in the text they
refer to the adimensionalization used in the figure which is being discussed. This applies to the remainder
of this thesis.
5.1 Analytical Model
In this section we will discuss the numerical implementation of the analytical model obtained in section
4.4.1. The step time-response of the linearized system will be compared to the non-linear model step
time response. A low order model will then be presented and compared to the full 39 states model.
The chosen equilibrium point for our implementation, at 180kN of thrust, was presented in table 4.1.
Our target equilibrium point when transitioning, at 130kN of thrust, is presented in table 5.1.
Table 5.1: Input-output equilibrium values at 130kN.
Value at equilibrium
Chamber pressure (bar) 44
Mixture ratio 5.5
35

5.1.1 Complete Model
The numerical implementation of the full 39 states model was performed in MATLAB. Hereafter we
compare the time responses of the linear and non-linear systems, the quantities being variational with
respect to the 180kN regime.
The time-response to a VBPH section step in figure 5.1 presents a transient profile which fits that
of the non-linear model. However, both settling time and damping are inadequate. Moreover, the static
gain does not match our reference model.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear modelFull linear model
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear modelFull linear model
(b) Mixture ratio
Figure 5.1: Linear and non-linear models time-response comparison to a VBPH section step of 20% ofthe nominal value at t = 0.
The time-response to a VBPO section step in figure 5.2, in agreement with what was seen for the
VBPH, has a transient response which generally fits that of the non-linear model. Both the chamber
pressure and the mixing ratio transfer functions present a static gain difference when compared to our
reference as well as a slight difference of response time. Moreover, the chamber pressure presents a
different damping than expected and an undesired non-minimum phase zero.
Time0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0 Non-linear modelFull linear model
(a) Chamber pressure
Time0.3 0.4 0.5 0.6 0.7 0.8 0.9
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0Non-linear modelFull linear model
(b) Mixture ratio
Figure 5.2: Linear and non-linear models time-response comparison to a VBPO section step of 10% ofthe nominal value at t = 0.25.
36

The step sizes rest within the domain validity of the linear model for the differences between the two
models remain constant for infinitely smaller step sizes.
In section 5.3 we will discuss the causes of the observed discrepancies between the analytic linear
model and the non-linear model.
5.1.2 Reduced Model
Although the time-response of the full linear model does not exactly match the non-linear model time
response, let us consider that it is representative of the behaviour of a liquid-propellant rocket engine
with an expander cycle. Under this assumption, we seek to obtain a low-order linear-model that models
the dominant dynamics of the engine. This model is vital to design control laws with known linear
techniques.
The implemented reduction technique was described in section 3.3.1. The importance of keeping
a state-space system with physical meaning was then highlighted. Model reduction through balanced
realizations or Hankel-norm techniques was considered but discarded because it implies a change of
state-space basis.
After a series of trial and error essays along with the feedback from the propulsion experts we found
the 5 states which dominate the dynamic response of the system. They are the rotational speeds of
both turbines, an hydrogen thermodynamic property at the inlet of the regenerative circuit, an hydrogen
thermodynamic property at the cavity with the biggest volume and the temperature of the wall modelling
the interface of the regenerative circuit. This is not at all surprising given that the turbo-pump systems
and the regenerative circuit are central elements to the design. The former control the total mass flow-
rate that is fed into the engine while the latter heats the liquid hydrogen to a gaseous form that will
power the turbines, therefore being the sole source of energy of the thermodynamic cycle. The biggest
hydrogen cavity, on the other hand, plays an important role because its volume is at least twice as big
as any other cavity in the engine.
The comparative time-responses are in figures 5.3 and 5.4. The list of poles is presented in table 5.2.
It is adimensionalized by the lowest frequency pole.
Table 5.2: Poles of the reduced analytical linear model.
Pole Damping Frequency
-1 1 1
-4.14±1.64i 0.93 4.46
-34.71 1 34.71
-70.11 1 70.11
The dynamic responses triggered by the VBPH valve maintain the same settling time at the expense
of a deterioration of the transient response. This effect is more profound in the mixture ratio response.
It was observed that the ensemble of the states associated with the cavities are responsible for this
deterioration. When we add them progressively to the reduced model we find that the transient response
37
increasingly fits that of the complete model. Nevertheless, we can not keep these states due to our need
of finding a model with the lowest order possible, which is why we kept only the biggest one.
Time0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0
Full linear modelReduced linear model
(a) Chamber pressure
Time0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Mix
ture
rat
io
-0.8
-0.6
-0.4
-0.2
0
Full linear modelReduced linear model
(b) Mixture ratio
Figure 5.3: Full and reduced linear models time-response comparison to a VBPH section step of 20% ofthe nominal value at t = 0.
The degradation of the transient response is less evident in the time-response to a VBPO section step.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0Full linear modelReduced linear model
(a) Chamber pressure
Time0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0 Full linear modelReduced linear model
(b) Mixture ratio
Figure 5.4: Full and reduced linear models time-response comparison to a VBPO section step of 10% ofthe nominal value at t = 0.
The validity of the reduced set of states that was obtained is still to be tested in the next section
since our complete linear model was not validated.
5.2 Identified Model
In this section we present the implementation of the identification method presented in section 3.2.1.
Given that we know the engine system to have 39 states due to our analytic approach, we are able to
obtain a state-space model with physical states. Therefore, unlike most identification techniques, the
resulting model holds a physical meaning.
38
Hereupon, the implementation of this algorithm will be described, being applicable to both the com-
plete and the reduced model. The following steps were taken:
1. System excitation signal: the system was excited with two steps, one at t = 0 of δSVBPH =
0.01S0VBPH , another at t = 0.25 of δSVBPO = 0.01S0VBPO , where S0VBPH and S0VBPO are the nominal
open sections of the valves, and where time is measured in an arbitrary time-scale matching that
of the figures to be presented hereafter; step signals have the advantage of exciting all frequencies
of the system.
2. Time-response acquisition of the non-linear model: the non-linear time responses of the
chosen states and outputs are obtained and the variational quantities were calculated with respect
to the 180kN equilibrium point.
3. State-space formulation: using the formulation presented in section 3.2.1 we obtain the matrices
that describe our linear model in the vicinity of the equilibrium point; a zero-order hold method is
used to obtain a continuous state-space model; unlike the Tustin interpolation method, it behaves
better at high frequencies and doesn’t add a non-physical zero beyond the sampling frequency.
Only the VBPH and VBPO controlled inputs are considered.
5.2.1 Complete Model
When seeking to obtain a complete model, we use the time-responses of the identified 39 states. Our
sampling frequency is fs = 200Hz. The time-response of the identified model is presented in figure 5.5.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0 Non-linear modelIdentified linear model
(a) Chamber pressure
Time0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear modelIdentified linear model
(b) Mixture ratio
Figure 5.5: Full identified linear model and non-linear model time-response comparison to a VBPH sectionstep of 1% of the nominal value at t = 0 and a VBPO section step of 1% of the nominal value at t = 0.25.
While we take limited interest in a full 39 states identified model, this comparison allows us to validate
our algorithm. The time-response, when compared to that of the non-linear model for the same input, is
a perfect fit both in transient response and static gain.
The only inconsistency is the peak that is observed at t = 0.25 which is due to a loss of model
representativity at high frequencies. Although a zero-order hold method to convert the state-space model
39
to its continuous form was favoured, in the case of the complete model it increased the order of the
system to handle real negative poles. Consequently the Tustin method was used which introduces a
rather anomalous behaviour at high frequencies, namely at higher frequencies than that of the sampling
frequency.
5.2.2 Reduced Model
In this section we test the hypothesis made in section 5.1.2 concerning the reduced set of states
necessary to model the dominant dynamics of the engine. We apply the same identification technique,
only this time we solely use the data from the 5 dominant states. The time-responses are presented
in figure 5.6. The lists of poles and zeros are presented in tables 5.3 and 5.4. Once again, they are
adimensionalized by the lowest frequency pole. This particular frequency is used in the remainder of this
thesis to adimensionalize any angular frequency values.
Table 5.3: Poles of the reduced identified linearmodel.
Pole Damping Frequency
-1 1 1
-2.41±0.24i 0.995 2.41
-6.95 1 6.95
-60.21 1 60.21
Table 5.4: Zeros of the reduced identified linearmodel.
VBPH VBPO
Chamber
pressure
Mixture
Ratio
Chamber
pressure
Mixture
Ratio
7.59 -16.35 36.95 -11.58+5.05i
-10.05 -0.4+1.49i -6.40 -11.58-5.05i
-4.04 -0.4-1.49i -1.72 -2.06
-0.99 -0.96 -0.92 -0.98
Time0 0.1 0.2 0.3 0.4 0.5 0.6
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0Non-linear modelReduced identified linear model
(a) Chamber pressure
Time0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear modelReduced identified linear model
(b) Mixture ratio
Figure 5.6: Reduced identified linear model and non-linear model time-response comparison to a VBPHsection step of 1% of the nominal value at t = 0 and a VBPO section step of 1% of the nominal value att = 0.25 .
The chamber-pressure time-response remains a perfect fit. However, the mixture-ratio time-response
presents a response error to the VBPH time-step. It is, nonetheless, perfectly acceptable. In fact, the
40

error is much more reduced than what was expected when considering the analytic models. We therefore
validate our hypothesis and come to a strong conclusion regarding the essential physical states that model
our engine around an equilibrium point.
Time-Response Analysis
Table 5.5 indicates the settling times to within 2% of the static value of the four transfer functions
of the non-linear model around the equilibrium point. These are not dominated by the slowest pole of
the system. In theory, a first-order system with such pole would have a response time of approximately
0.41. What we observe, however, is closer to the settling time of a second order system with a pair of
complex conjugate poles such as the ones of the reduced identified linear model. This can be explained
by the presence of a zero in the vicinity of the slowest pole which partially cancels its dynamic response.
The transfer functions towards the chamber pressure present a zero on the right-half complex plane
and its correspondent non-minimum phase behaviour, particularly the chamber pressure response to a
VBPH input.
Table 5.5: 2% range settling times of the non-linear model.
VBPH VBPO
Chamber
pressure
Mixture
Ratio
Chamber
pressure
Mixture
Ratio
0.22 0.30 0.24 0.12
This behaviour of the chamber pressure to a change in open section of the valves can be physically
explained by a sudden increase of hydrogen mass-flow rate exiting the hydrogen pump to match what is
imposed by the valve. This is accompanied by a pressure drop on all cavities between the inlet of the
regenerative circuit and the valve, though the output pressure of the pump remains constant because the
turbine has not yet had the time to lower its regime. This phenomena accounts for an increase in mass
flow rate. In the case of a VBPH step, both the increase of chamber pressure and the first decrease in
mixing ratio are hence explained. Afterwards, the hydrogen turbine starts lowering its regime to the point
where the decrease in pump outlet pressure compensates the early transient phenomena. Therefore the
hydrogen mass flow rate starts decreasing, explaining the subsequent increase in mixing ratio since the
hydrogen turbo-pump system has faster dynamics than the oxygen turbo-pump. Lastly, the decrease of
oxygen mass-flow rate eventually compensates its hydrogen counterpart, thus the final decrease in mixing
ratio.
In the case of a VBPO step, the same mechanism explains the initial increase in chamber pressure.
However, no oscillations in the mixing ratio are observed because this valve only affects the oxygen turbo-
pump system, barely changing the hydrogen mass flow rate, thus rendering the settling-time difference
between the two turbo-pumps systems, which previously explained this phenomena, innocuous.
41
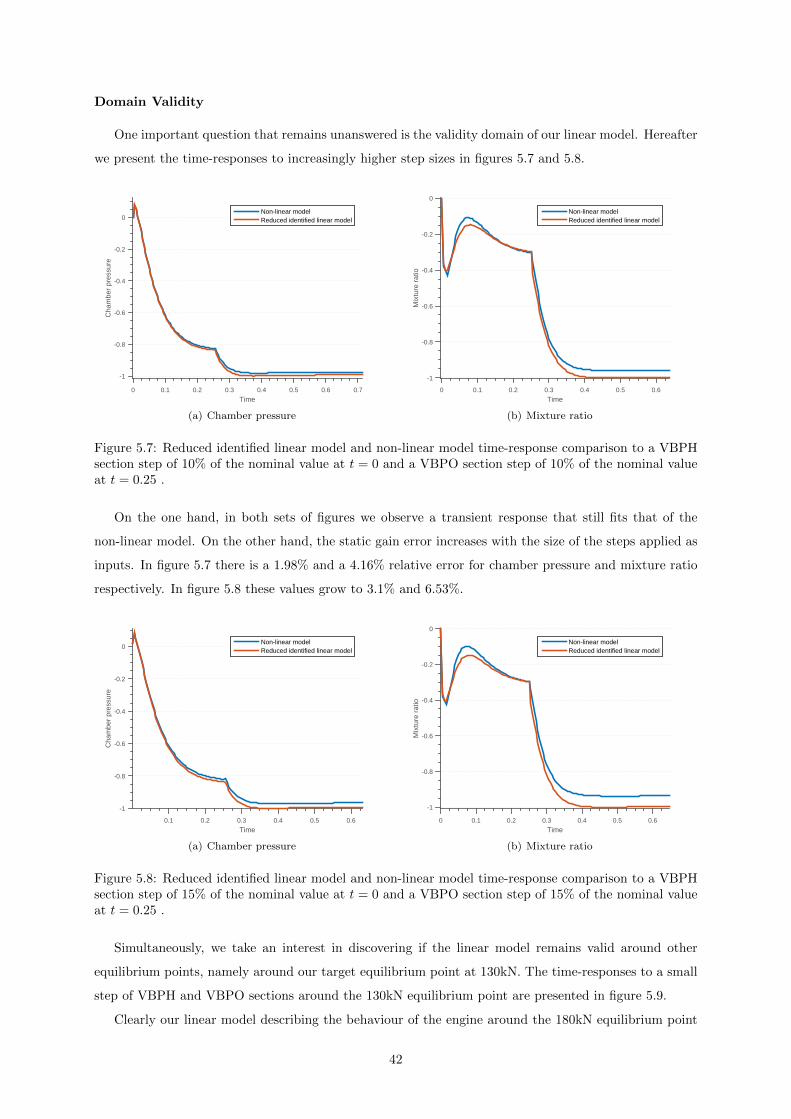
Domain Validity
One important question that remains unanswered is the validity domain of our linear model. Hereafter
we present the time-responses to increasingly higher step sizes in figures 5.7 and 5.8.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0Non-linear modelReduced identified linear model
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear modelReduced identified linear model
(b) Mixture ratio
Figure 5.7: Reduced identified linear model and non-linear model time-response comparison to a VBPHsection step of 10% of the nominal value at t = 0 and a VBPO section step of 10% of the nominal valueat t = 0.25 .
On the one hand, in both sets of figures we observe a transient response that still fits that of the
non-linear model. On the other hand, the static gain error increases with the size of the steps applied as
inputs. In figure 5.7 there is a 1.98% and a 4.16% relative error for chamber pressure and mixture ratio
respectively. In figure 5.8 these values grow to 3.1% and 6.53%.
Time0.1 0.2 0.3 0.4 0.5 0.6
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0Non-linear modelReduced identified linear model
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear modelReduced identified linear model
(b) Mixture ratio
Figure 5.8: Reduced identified linear model and non-linear model time-response comparison to a VBPHsection step of 15% of the nominal value at t = 0 and a VBPO section step of 15% of the nominal valueat t = 0.25 .
Simultaneously, we take an interest in discovering if the linear model remains valid around other
equilibrium points, namely around our target equilibrium point at 130kN. The time-responses to a small
step of VBPH and VBPO sections around the 130kN equilibrium point are presented in figure 5.9.
Clearly our linear model describing the behaviour of the engine around the 180kN equilibrium point
42
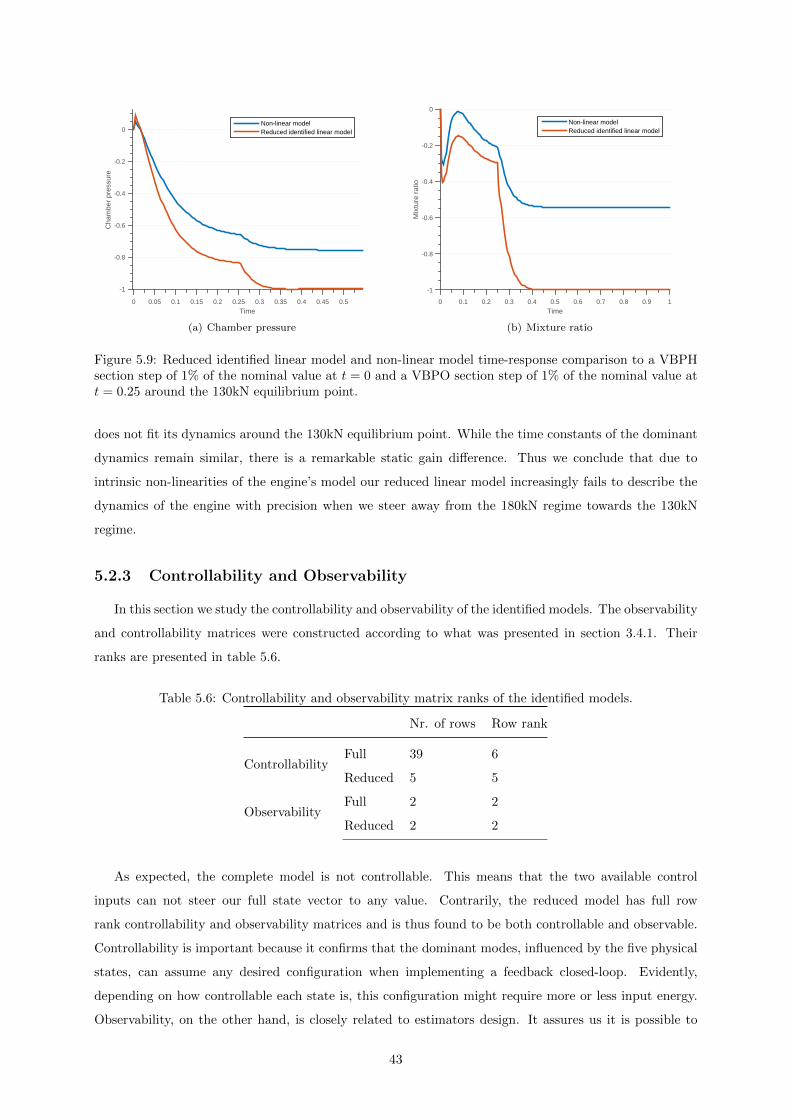
Time0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0Non-linear modelReduced identified linear model
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear modelReduced identified linear model
(b) Mixture ratio
Figure 5.9: Reduced identified linear model and non-linear model time-response comparison to a VBPHsection step of 1% of the nominal value at t = 0 and a VBPO section step of 1% of the nominal value att = 0.25 around the 130kN equilibrium point.
does not fit its dynamics around the 130kN equilibrium point. While the time constants of the dominant
dynamics remain similar, there is a remarkable static gain difference. Thus we conclude that due to
intrinsic non-linearities of the engine’s model our reduced linear model increasingly fails to describe the
dynamics of the engine with precision when we steer away from the 180kN regime towards the 130kN
regime.
5.2.3 Controllability and Observability
In this section we study the controllability and observability of the identified models. The observability
and controllability matrices were constructed according to what was presented in section 3.4.1. Their
ranks are presented in table 5.6.
Table 5.6: Controllability and observability matrix ranks of the identified models.
Nr. of rows Row rank
ControllabilityFull 39 6
Reduced 5 5
ObservabilityFull 2 2
Reduced 2 2
As expected, the complete model is not controllable. This means that the two available control
inputs can not steer our full state vector to any value. Contrarily, the reduced model has full row
rank controllability and observability matrices and is thus found to be both controllable and observable.
Controllability is important because it confirms that the dominant modes, influenced by the five physical
states, can assume any desired configuration when implementing a feedback closed-loop. Evidently,
depending on how controllable each state is, this configuration might require more or less input energy.
Observability, on the other hand, is closely related to estimators design. It assures us it is possible to
43
estimate the internal system’s states using the measurements from the outputs and the inputs.
In this particular application to the VINCI engine, where the design and placement of the valves
as well as the incorporated sensors are already chosen, quantifying controllability and observability is
senseless. However, should the engine project be in its early stages, it could be interesting to compare
different solutions by quantifying these two properties.
5.3 Model Comparison
In section 5.1.1 we found that our full analytical model fails to correctly model the behaviour of our
system. Here we present an extensive but not exhaustive list of flaws that contribute to this misrepre-
sentation:
1. Density invariance in liquid state;
2. Simplified combustion chamber model;
3. Reduced number of elements compared to the original model;
4. Constant pump efficiency;
5. Constant heat capacity at constant pressure in the turbines and the pumps;
6. Considering ideal gases instead of real gases;
All of these hypothesis or simplifications were found to have a sizeable effect on the system, even in
the vicinity of an equilibrium point. Modelling them such as they were in the non-linear system would
greatly increase the complexity of the implementation of the linear-model which in turn is against our
initial objective of finding a simple yet complete model.
A lot of effort was put into correcting this model, namely to make sure the numerical application was
correct given the extraordinary amount of parameters needed to model the engine, not to mention a high
number of manual manipulations. Despite these efforts, a grave numerical error that would explain the
observed differences might still be present. Among some of the difficulties were errors in our baseline
documentation and lack of explicit equations for some elements of the non-linear CARINS model.
In order to compare the five models we present their Bode plots for their four transfer functions. For
the analytical and identified models the MATLAB bode command was used. To determine the Bode plot for
the non-linear model around the equilibrium point, however, a more fundamental approach was taken due
to lack of other tools. Firstly, for a limited number of frequencies, a sinusoidal input was applied to each
valve. The outputs were expected to be sinusoids with the same frequency but different amplitude and
phase. By analysing the input and output sinusoids, we are able to determine both the gain magnitude,
Ao/Ai, and the phase shift. The results are presented in figures 5.10 and 5.11.
Because we use a limited sampling frequency, beyond a certain frequency the frequency responses
of both the identified models and of the CARINS model are unreliable. We can actually see that the
responses diverge for higher frequencies.
44
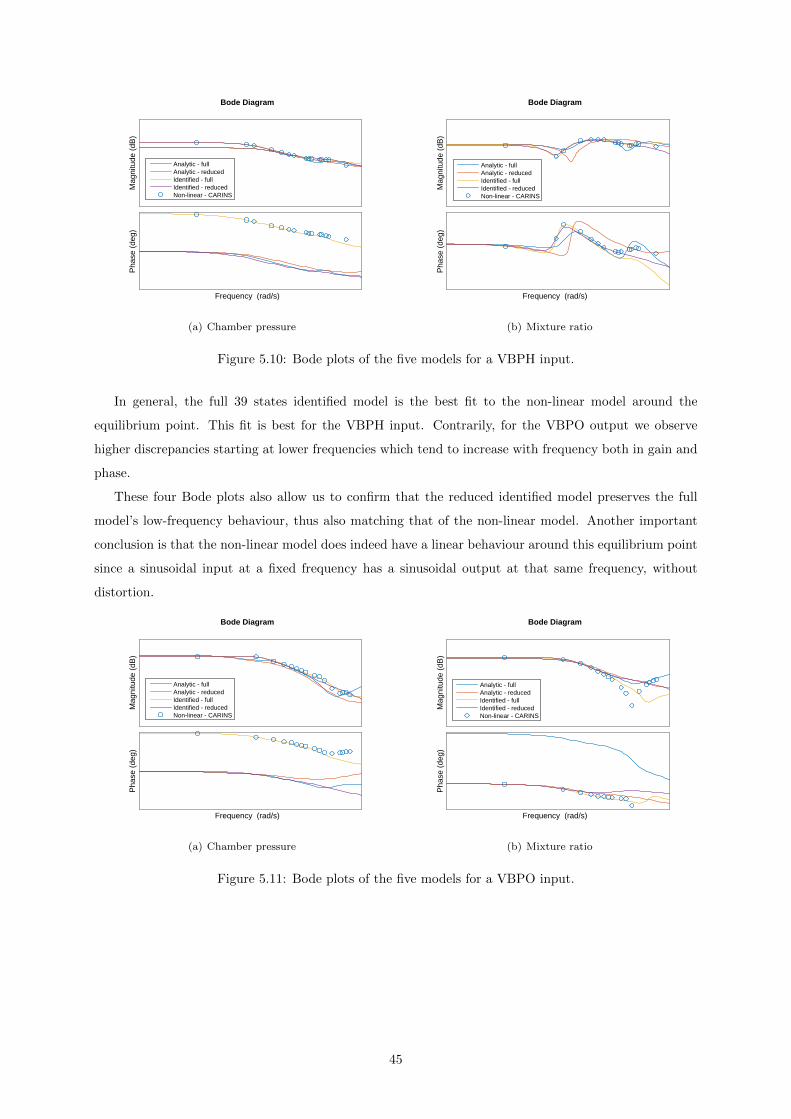
Mag
nitu
de (
dB)
Pha
se (
deg)
Analytic - fullAnalytic - reducedIdentified - fullIdentified - reducedNon-linear - CARINS
Bode Diagram
Frequency (rad/s)
(a) Chamber pressure
Mag
nitu
de (
dB)
Pha
se (
deg)
Analytic - fullAnalytic - reducedIdentified - fullIdentified - reducedNon-linear - CARINS
Bode Diagram
Frequency (rad/s)
(b) Mixture ratio
Figure 5.10: Bode plots of the five models for a VBPH input.
In general, the full 39 states identified model is the best fit to the non-linear model around the
equilibrium point. This fit is best for the VBPH input. Contrarily, for the VBPO output we observe
higher discrepancies starting at lower frequencies which tend to increase with frequency both in gain and
phase.
These four Bode plots also allow us to confirm that the reduced identified model preserves the full
model’s low-frequency behaviour, thus also matching that of the non-linear model. Another important
conclusion is that the non-linear model does indeed have a linear behaviour around this equilibrium point
since a sinusoidal input at a fixed frequency has a sinusoidal output at that same frequency, without
distortion.
Mag
nitu
de (
dB)
Pha
se (
deg)
Analytic - fullAnalytic - reducedIdentified - fullIdentified - reducedNon-linear - CARINS
Bode Diagram
Frequency (rad/s)
(a) Chamber pressure
Mag
nitu
de (
dB)
Pha
se (
deg)
Analytic - fullAnalytic - reducedIdentified - fullIdentified - reducedNon-linear - CARINS
Bode Diagram
Frequency (rad/s)
(b) Mixture ratio
Figure 5.11: Bode plots of the five models for a VBPO input.
45
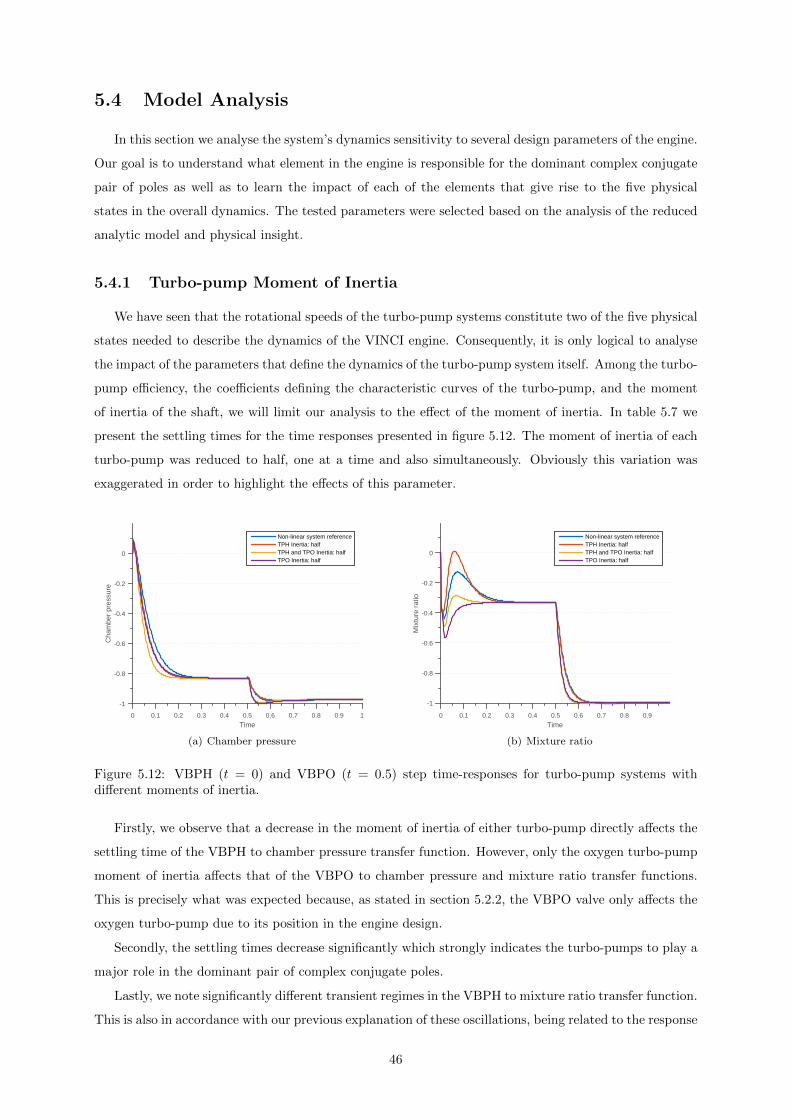
5.4 Model Analysis
In this section we analyse the system’s dynamics sensitivity to several design parameters of the engine.
Our goal is to understand what element in the engine is responsible for the dominant complex conjugate
pair of poles as well as to learn the impact of each of the elements that give rise to the five physical
states in the overall dynamics. The tested parameters were selected based on the analysis of the reduced
analytic model and physical insight.
5.4.1 Turbo-pump Moment of Inertia
We have seen that the rotational speeds of the turbo-pump systems constitute two of the five physical
states needed to describe the dynamics of the VINCI engine. Consequently, it is only logical to analyse
the impact of the parameters that define the dynamics of the turbo-pump system itself. Among the turbo-
pump efficiency, the coefficients defining the characteristic curves of the turbo-pump, and the moment
of inertia of the shaft, we will limit our analysis to the effect of the moment of inertia. In table 5.7 we
present the settling times for the time responses presented in figure 5.12. The moment of inertia of each
turbo-pump was reduced to half, one at a time and also simultaneously. Obviously this variation was
exaggerated in order to highlight the effects of this parameter.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear system referenceTPH Inertia: halfTPH and TPO Inertia: halfTPO Inertia: half
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear system referenceTPH Inertia: halfTPH and TPO Inertia: halfTPO Inertia: half
(b) Mixture ratio
Figure 5.12: VBPH (t = 0) and VBPO (t = 0.5) step time-responses for turbo-pump systems withdifferent moments of inertia.
Firstly, we observe that a decrease in the moment of inertia of either turbo-pump directly affects the
settling time of the VBPH to chamber pressure transfer function. However, only the oxygen turbo-pump
moment of inertia affects that of the VBPO to chamber pressure and mixture ratio transfer functions.
This is precisely what was expected because, as stated in section 5.2.2, the VBPO valve only affects the
oxygen turbo-pump due to its position in the engine design.
Secondly, the settling times decrease significantly which strongly indicates the turbo-pumps to play a
major role in the dominant pair of complex conjugate poles.
Lastly, we note significantly different transient regimes in the VBPH to mixture ratio transfer function.
This is also in accordance with our previous explanation of these oscillations, being related to the response
46
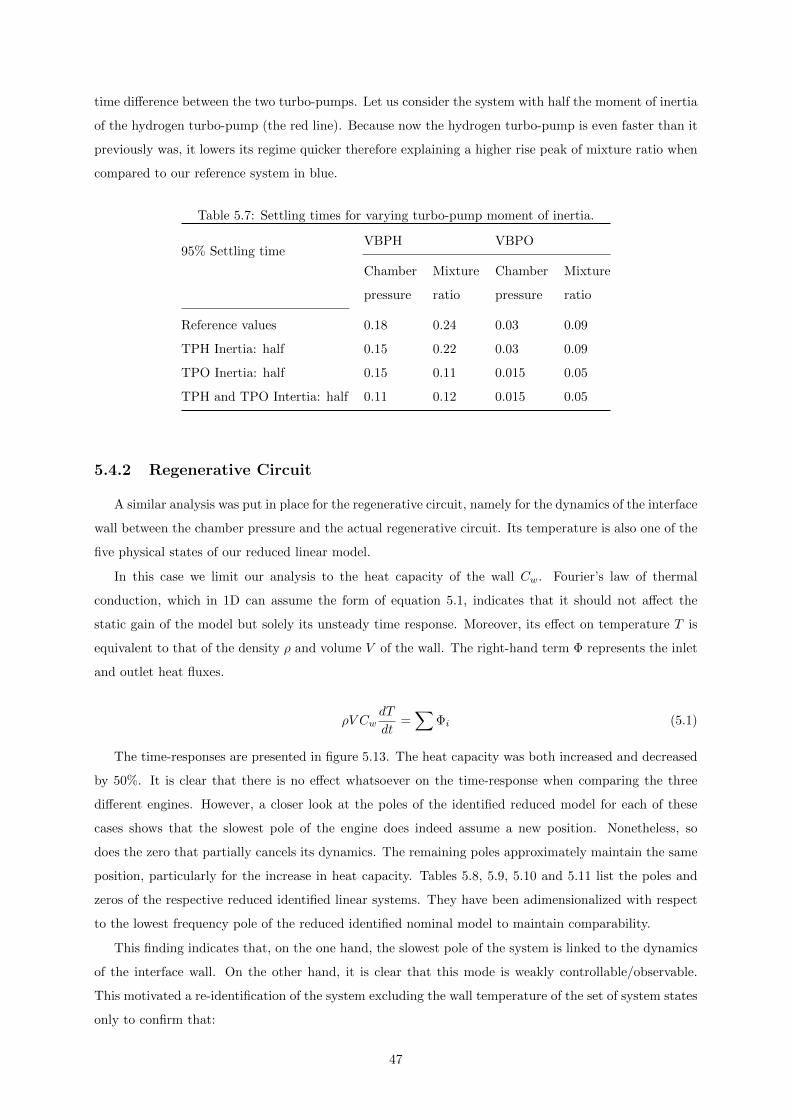
time difference between the two turbo-pumps. Let us consider the system with half the moment of inertia
of the hydrogen turbo-pump (the red line). Because now the hydrogen turbo-pump is even faster than it
previously was, it lowers its regime quicker therefore explaining a higher rise peak of mixture ratio when
compared to our reference system in blue.
Table 5.7: Settling times for varying turbo-pump moment of inertia.
95% Settling timeVBPH VBPO
Chamber
pressure
Mixture
ratio
Chamber
pressure
Mixture
ratio
Reference values 0.18 0.24 0.03 0.09
TPH Inertia: half 0.15 0.22 0.03 0.09
TPO Inertia: half 0.15 0.11 0.015 0.05
TPH and TPO Intertia: half 0.11 0.12 0.015 0.05
5.4.2 Regenerative Circuit
A similar analysis was put in place for the regenerative circuit, namely for the dynamics of the interface
wall between the chamber pressure and the actual regenerative circuit. Its temperature is also one of the
five physical states of our reduced linear model.
In this case we limit our analysis to the heat capacity of the wall Cw. Fourier’s law of thermal
conduction, which in 1D can assume the form of equation 5.1, indicates that it should not affect the
static gain of the model but solely its unsteady time response. Moreover, its effect on temperature T is
equivalent to that of the density ρ and volume V of the wall. The right-hand term Φ represents the inlet
and outlet heat fluxes.
ρV CwdT
dt=∑
Φi (5.1)
The time-responses are presented in figure 5.13. The heat capacity was both increased and decreased
by 50%. It is clear that there is no effect whatsoever on the time-response when comparing the three
different engines. However, a closer look at the poles of the identified reduced model for each of these
cases shows that the slowest pole of the engine does indeed assume a new position. Nonetheless, so
does the zero that partially cancels its dynamics. The remaining poles approximately maintain the same
position, particularly for the increase in heat capacity. Tables 5.8, 5.9, 5.10 and 5.11 list the poles and
zeros of the respective reduced identified linear systems. They have been adimensionalized with respect
to the lowest frequency pole of the reduced identified nominal model to maintain comparability.
This finding indicates that, on the one hand, the slowest pole of the system is linked to the dynamics
of the interface wall. On the other hand, it is clear that this mode is weakly controllable/observable.
This motivated a re-identification of the system excluding the wall temperature of the set of system states
only to confirm that:
47
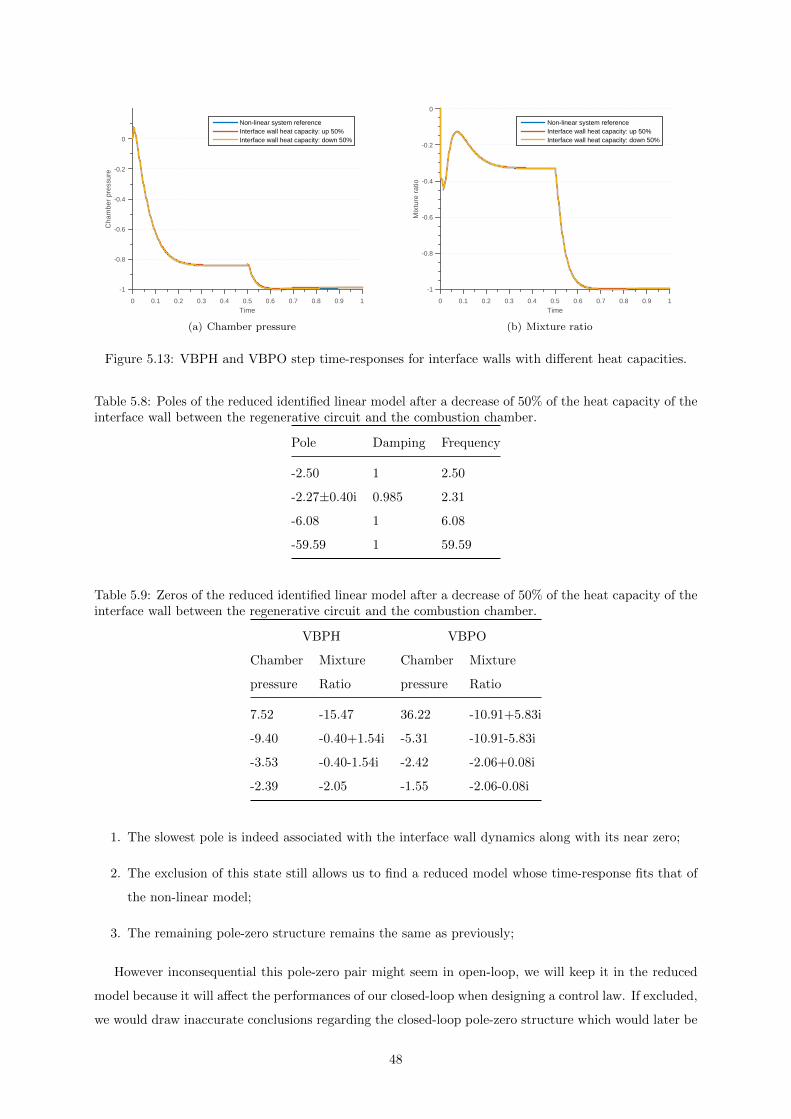
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear system referenceInterface wall heat capacity: up 50%Interface wall heat capacity: down 50%
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear system referenceInterface wall heat capacity: up 50%Interface wall heat capacity: down 50%
(b) Mixture ratio
Figure 5.13: VBPH and VBPO step time-responses for interface walls with different heat capacities.
Table 5.8: Poles of the reduced identified linear model after a decrease of 50% of the heat capacity of theinterface wall between the regenerative circuit and the combustion chamber.
Pole Damping Frequency
-2.50 1 2.50
-2.27±0.40i 0.985 2.31
-6.08 1 6.08
-59.59 1 59.59
Table 5.9: Zeros of the reduced identified linear model after a decrease of 50% of the heat capacity of theinterface wall between the regenerative circuit and the combustion chamber.
VBPH VBPO
Chamber
pressure
Mixture
Ratio
Chamber
pressure
Mixture
Ratio
7.52 -15.47 36.22 -10.91+5.83i
-9.40 -0.40+1.54i -5.31 -10.91-5.83i
-3.53 -0.40-1.54i -2.42 -2.06+0.08i
-2.39 -2.05 -1.55 -2.06-0.08i
1. The slowest pole is indeed associated with the interface wall dynamics along with its near zero;
2. The exclusion of this state still allows us to find a reduced model whose time-response fits that of
the non-linear model;
3. The remaining pole-zero structure remains the same as previously;
However inconsequential this pole-zero pair might seem in open-loop, we will keep it in the reduced
model because it will affect the performances of our closed-loop when designing a control law. If excluded,
we would draw inaccurate conclusions regarding the closed-loop pole-zero structure which would later be
48
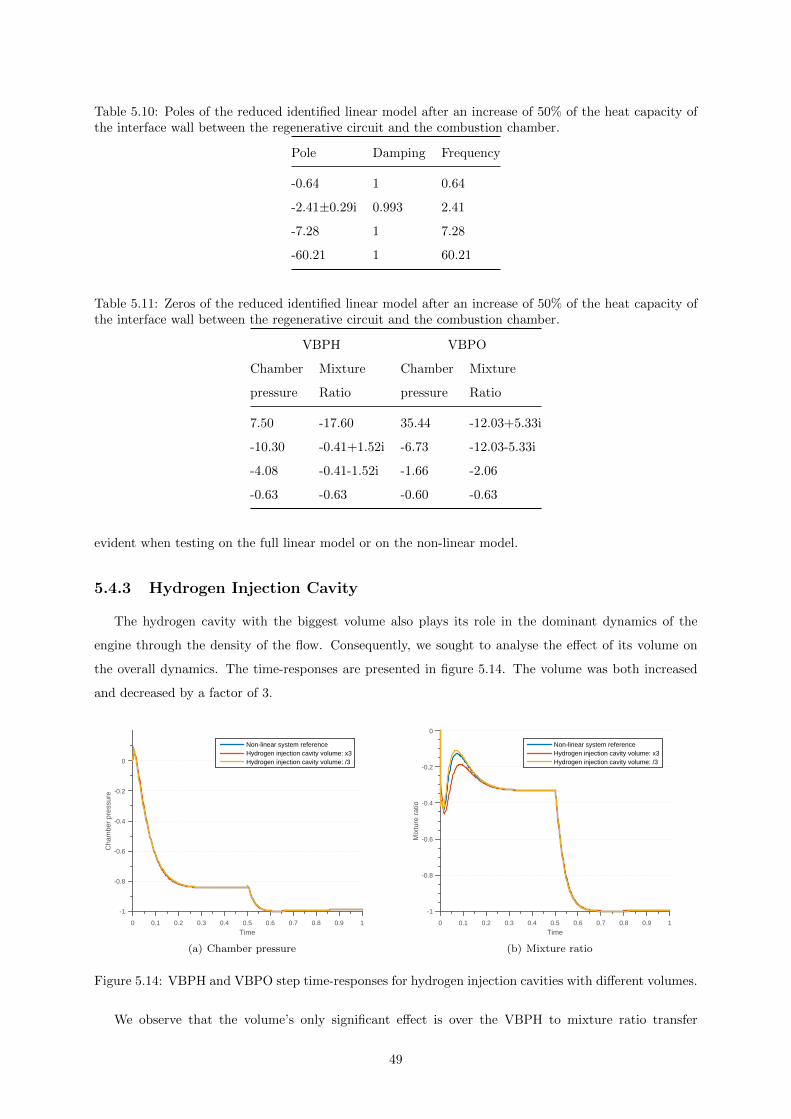
Table 5.10: Poles of the reduced identified linear model after an increase of 50% of the heat capacity ofthe interface wall between the regenerative circuit and the combustion chamber.
Pole Damping Frequency
-0.64 1 0.64
-2.41±0.29i 0.993 2.41
-7.28 1 7.28
-60.21 1 60.21
Table 5.11: Zeros of the reduced identified linear model after an increase of 50% of the heat capacity ofthe interface wall between the regenerative circuit and the combustion chamber.
VBPH VBPO
Chamber
pressure
Mixture
Ratio
Chamber
pressure
Mixture
Ratio
7.50 -17.60 35.44 -12.03+5.33i
-10.30 -0.41+1.52i -6.73 -12.03-5.33i
-4.08 -0.41-1.52i -1.66 -2.06
-0.63 -0.63 -0.60 -0.63
evident when testing on the full linear model or on the non-linear model.
5.4.3 Hydrogen Injection Cavity
The hydrogen cavity with the biggest volume also plays its role in the dominant dynamics of the
engine through the density of the flow. Consequently, we sought to analyse the effect of its volume on
the overall dynamics. The time-responses are presented in figure 5.14. The volume was both increased
and decreased by a factor of 3.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear system referenceHydrogen injection cavity volume: x3Hydrogen injection cavity volume: /3
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Non-linear system referenceHydrogen injection cavity volume: x3Hydrogen injection cavity volume: /3
(b) Mixture ratio
Figure 5.14: VBPH and VBPO step time-responses for hydrogen injection cavities with different volumes.
We observe that the volume’s only significant effect is over the VBPH to mixture ratio transfer
49

function, namely its transient time-response. Let us consider the volume increase by a factor of 3 for
example (red line). This increase causes a delay of the hydrogen mass-flow rate arriving at the chamber
thus explaining a smaller rise peak of mixture ratio when compared to our reference model.
5.4.4 Mode Analysis Summary
The effects of the volume of the liquid cavity at the inlet of the regenerative circuit, whose thermo-
dynamic state is our fifth and last physical state, were not evaluated in the previous subsections. It was
observed, by re-identification with exclusion of this state, that it is associated with the fastest mode of
our reduced model and that its main effect on the time-response is an enhanced modelling of the non-
minimum phase behaviour of the chamber pressure. This is coherent with the explanation provided in
section 5.2.2 for this behaviour. Even though this mode is at a considerably higher frequency than the
dominant one, it was decided to preserve it in the reduced model. On the one hand because it improves,
even if only slightly, our model’s time response representativity and on the other hand because it does
not interfere with the controller design process.
The main conclusions of this section are the following:
1. The turbo-pump systems are associated with the dominant complex conjugate pair of poles;
2. The moment of inertia of the turbo-pumps significantly affects the settling-time of the four transfer
functions;
3. The temperature of the interface wall of the regenerative circuit is associated with the slowest
pole, yet it is weakly controllable/observable, and therefore has no significant effect over the time-
response;
4. The volume of the biggest cavity plays a major role in the transient time-response of the VBPH to
mixture ratio transfer function by lagging the time-response of the hydrogen mass flow rate arriving
at the inlet of the combustion chamber;
5.5 Summary
In this chapter we discussed the implementation of analytic and identified linear models of the VINCI
engine, both complete and reduced. A sufficient set of states to describe the dominant dynamics of
the engine was deduced. The reduced identified model, being the most adequate for control law design
purposes, was analysed. A comparison in the frequency domain between the four obtained models was
drawn only to confirm the validity of both the complete and the reduced identified linear models. Lastly a
sensitivity analysis was performed in order to understand the physics behind the unsteady time-response
of the engine.
50
Chapter 6
Control Specifications
In order to have a well-posed control problem we need to define the specifications to be met by our
control law. It is worth noting that since the engine is still in development, several numeric values are
unavailable. However, we have nonetheless, to the best of our ability, fixated conservative values to
those parameters. Because they are subjected to confidentiality, we will abstain from presenting them
in this chapter, and will therefore only list the type of specifications that were set. In chapters 7 and
8 adimensionalized values are presented when necessary to discuss control law implementation and the
results.
Hereafter we discuss parameter uncertainty, domain variation of the input perturbations, failure
events, mechanical/thermal limitations of the components, transient and steady-state time-response,
stability margins, discretization frequency and sensor’s characteristics.
6.1 Transient and Steady-State Time-Response
The transient and steady-state time-response of the closed loop system will have to respect criteria
of the following type:
1. Maximum overshoot of chamber pressure and mixture ratio;
2. Maximum 95% settling-time for step-like corrections of chamber pressure and mixture ratio;
3. Equilibrium point transition 95% settling time (180kN to 130kN);
4. Maximum perturbation rejection time;
5. Minimum required chamber pressure and mixture ratio precision;
The equilibrium point transition time is constrained by a maximum acceptable rate of chamber pres-
sure provided by the engine manufacturer. The required precision, on the other hand, concerns the
bounds around a desired reference value at which point we no longer require the system to seek to reduce
the error between the reference and the output. It allows us to limit the functioning of the actuators -
through a dead-zone for example - thus reducing the energy consumption. Both the settling-time and
51
the required precision address the needs of the PAM system such as they were presented to us at this
point of the development.
6.2 Stability margins
The minimum required modulus margin is 0.5, a typical value found in the literature, namely in
[21]. This will limit the maximum amplification of the reference value to the setpoint error to 2. In
other words, the H-infinity norm of the sensitivity function such as it is defined in section 3.5 can not
be higher than 2 - ||S||∞ < 2. We seek to respect this specification for all possible engine models within
the uncertainty set during the robustness analysis. Because this analysis does not take into account all
sources of uncertainty, it is important to guarantee a safety margin capable of accommodating possible
stability deteriorations due to discretization and non-linearities, among others.
6.3 Discretization Frequency
At this stage of the project the controller is set to work at a fairly high frequency, for which no
discretization effects are expected given the bandwidth of the system. However, since this value is yet to
be fixed, we will seek to determine the minimum frequency for which we do not need to take into account
the discretization effects.
6.4 Sensor’s Characteristics
The VINCI engine possesses several sensors, among which there are 8 of particular interest:
1. Chamber pressure;
2. Rotational speed of the hydrogen turbine;
3. Rotational speed of the oxygen turbine;
4. VBPH opening angle;
5. VBPO opening angle;
6. Oxygen pump outlet pressure;
7. Hydrogen pump outlet pressure;
8. Temperature of the regenerative circuit.
Notably, there is nor a direct measurement of the mixture ratio neither of the hydrogen and oxygen
mass flow rates. These sensors are available during ground tests but at this point there are no plans to
embed them in the launcher during flight. Therefore these quantities need to be estimated. Within the
scope of this thesis we will focus on the modelling of the chamber pressure sensor and will also attribute
equivalent characteristics to a pseudo mixture ratio sensor.
52
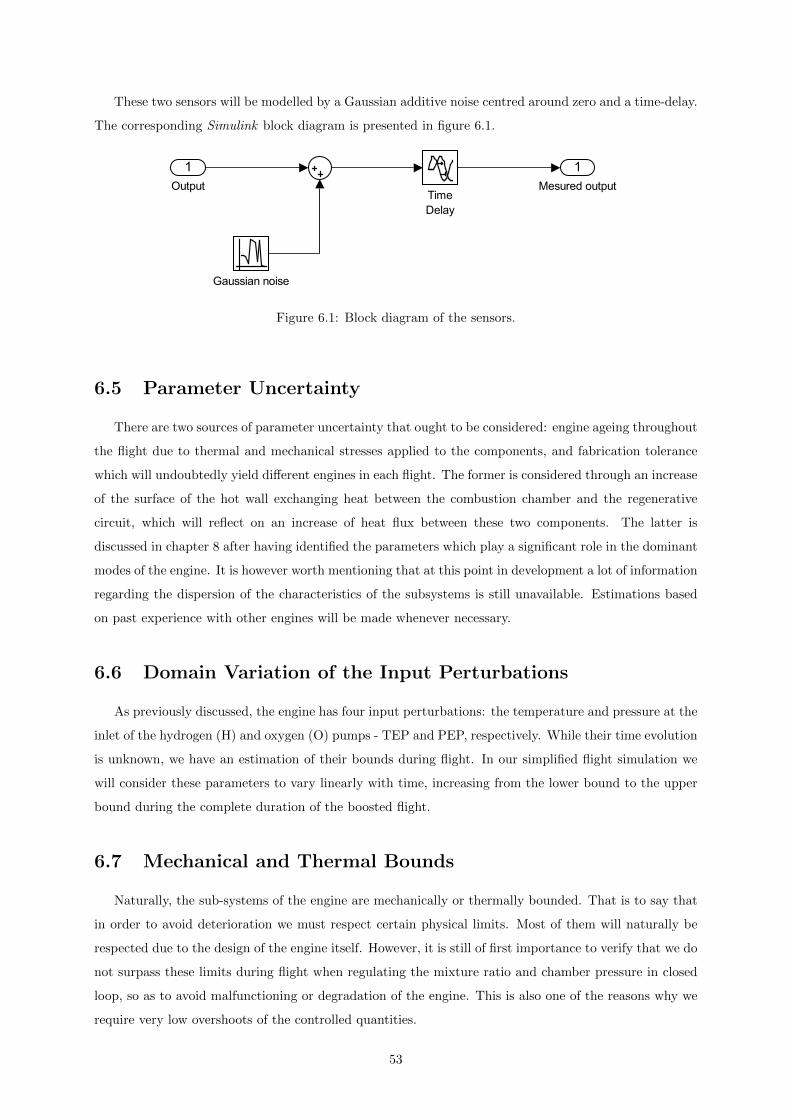
These two sensors will be modelled by a Gaussian additive noise centred around zero and a time-delay.
The corresponding Simulink block diagram is presented in figure 6.1.
1
Mesured output
1
Output
Gaussian noise
Time
Delay
Figure 6.1: Block diagram of the sensors.
6.5 Parameter Uncertainty
There are two sources of parameter uncertainty that ought to be considered: engine ageing throughout
the flight due to thermal and mechanical stresses applied to the components, and fabrication tolerance
which will undoubtedly yield different engines in each flight. The former is considered through an increase
of the surface of the hot wall exchanging heat between the combustion chamber and the regenerative
circuit, which will reflect on an increase of heat flux between these two components. The latter is
discussed in chapter 8 after having identified the parameters which play a significant role in the dominant
modes of the engine. It is however worth mentioning that at this point in development a lot of information
regarding the dispersion of the characteristics of the subsystems is still unavailable. Estimations based
on past experience with other engines will be made whenever necessary.
6.6 Domain Variation of the Input Perturbations
As previously discussed, the engine has four input perturbations: the temperature and pressure at the
inlet of the hydrogen (H) and oxygen (O) pumps - TEP and PEP, respectively. While their time evolution
is unknown, we have an estimation of their bounds during flight. In our simplified flight simulation we
will consider these parameters to vary linearly with time, increasing from the lower bound to the upper
bound during the complete duration of the boosted flight.
6.7 Mechanical and Thermal Bounds
Naturally, the sub-systems of the engine are mechanically or thermally bounded. That is to say that
in order to avoid deterioration we must respect certain physical limits. Most of them will naturally be
respected due to the design of the engine itself. However, it is still of first importance to verify that we do
not surpass these limits during flight when regulating the mixture ratio and chamber pressure in closed
loop, so as to avoid malfunctioning or degradation of the engine. This is also one of the reasons why we
require very low overshoots of the controlled quantities.
53
Hereafter we list the parameters for which there exists a lower and upper bounds to be respected:
1. Oxygen and hydrogen turbines rotational speeds;
2. Chamber pressure and mixture ratio;
3. Oxygen and hydrogen turbines inlet temperature;
4. Oxygen and hydrogen pumps outlet pressure;
Lastly, we present the list of parameters for which there is only an upper bound to be respected:
1. Oxygen and hydrogen turbines inlet pressure;
2. Oxygen turbine outlet pressure;
3. Turbo-pump torque;
4. Oxygen and hydrogen injectors inlet pressure and pressure drop;
5. Regenerative circuit inlet pressure;
6.8 Failure Events
In extraordinary situations, one might need to handle significant failure events. Hereafter the short
list that will be considered:
1. Increase in the pressure loss coefficient of the hydrogen injector;
2. Increase in the pressure loss coefficient of the oxygen injector;
3. Decrease in the efficiency of the oxygen pump;
4. Decrease in the efficiency of the oxygen turbine;
5. Decrease in the efficiency of the hydrogen pump;
6. Decrease in the efficiency of the hydrogen turbine;
There are no established specifications for the robustness of the control law regarding these failure
events. They will therefore not be taken into account when designing the control law but will rather be
simulated a posteriori and an upper or lower allowable bound will be determined for each case.
6.9 Summary
In this chapter the control problem was defined by listing the specifications to be met. The objectives
of the controller are thus defined.
54
Chapter 7
Control Law Design and
Implementation
In this chapter, an in-depth description of the controller design procedure is provided. After validating
the control law in both the reduced and complete linear models, we characterize the resulting closed-loop.
7.1 PID Controller
The feedback proportional-integral-derivative controller dates back to the early 20th century and is
still, to this day, one of the most popular controllers across the industry. It has repeatedly proven to be
an effective feedback structure in many different applications mainly due to its ”memory” and predictive
characteristics. Given the industry’s predilection for the simplest solutions possible, it will constitute our
first approach to control the VINCI engine.
The controller is composed of three different terms:
1. Proportional: this term calculates the system’s input in function of the current value of the error
between a set-point and the output of the plant process; on its own it yields a steady-state error that
usually decreases proportionally with the magnitude of the gain; this term also decreases rise-time,
increases the overshoot and, when excessively high, may destabilize the system.
2. Integral: it accumulates the past error over time thus being capable of completely eliminating the
steady-state error of the closed-loop;
3. Derivative: this term has a predictive capability because it uses the current derivative of the error
to correct the control input; it usually enables us to increase the damping of the system.
Its block diagram is presented in figure 7.1. A pure derivative term is not realizable, therefore we
associate a low-pass filter to the derivative.
As seen in section 4.4, our plant system is a 2 × 2 MIMO system. Our first control strategy to be
applied to the VINCI engine will consist of a pair of PID controllers between two pairs of input-output
55
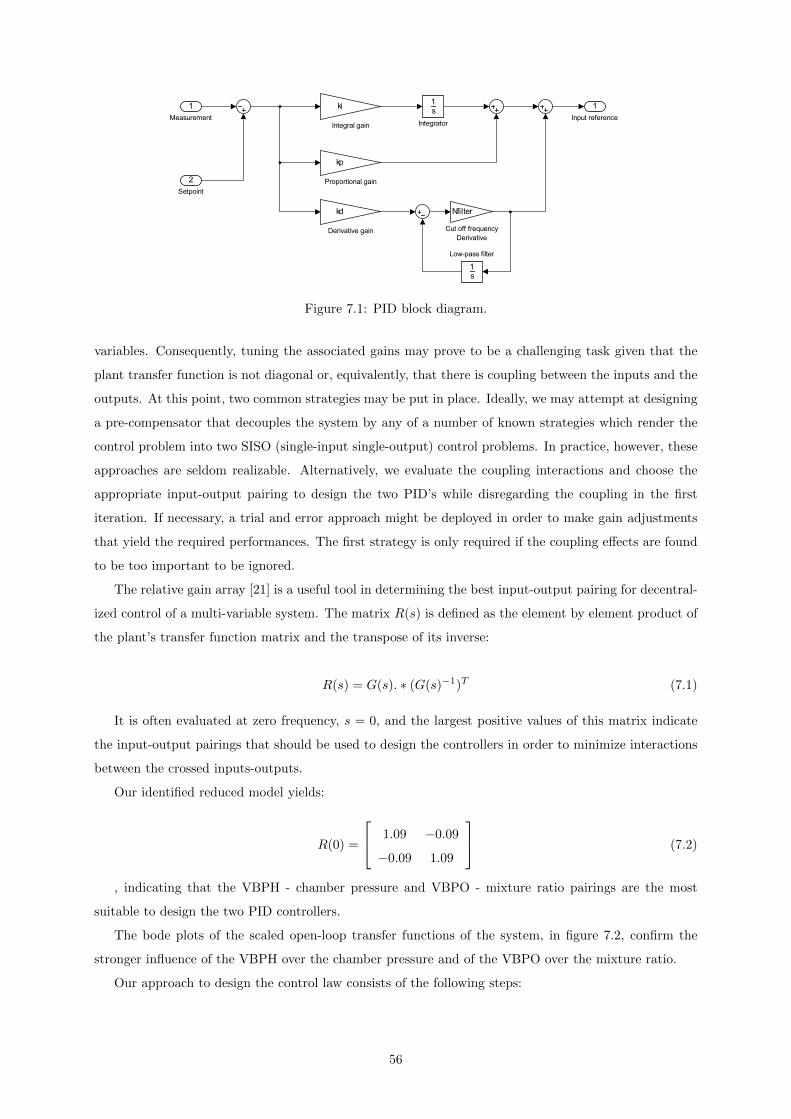
1
Input reference
1
Measurement
2
Setpoint
ki
Integral gain
1s
Integrator
kp
Proportional gain
kd
Derivative gain
Nfilter
Cut off frequency
Derivative
1s
Low-pass filter
Figure 7.1: PID block diagram.
variables. Consequently, tuning the associated gains may prove to be a challenging task given that the
plant transfer function is not diagonal or, equivalently, that there is coupling between the inputs and the
outputs. At this point, two common strategies may be put in place. Ideally, we may attempt at designing
a pre-compensator that decouples the system by any of a number of known strategies which render the
control problem into two SISO (single-input single-output) control problems. In practice, however, these
approaches are seldom realizable. Alternatively, we evaluate the coupling interactions and choose the
appropriate input-output pairing to design the two PID’s while disregarding the coupling in the first
iteration. If necessary, a trial and error approach might be deployed in order to make gain adjustments
that yield the required performances. The first strategy is only required if the coupling effects are found
to be too important to be ignored.
The relative gain array [21] is a useful tool in determining the best input-output pairing for decentral-
ized control of a multi-variable system. The matrix R(s) is defined as the element by element product of
the plant’s transfer function matrix and the transpose of its inverse:
R(s) = G(s). ∗ (G(s)−1)T (7.1)
It is often evaluated at zero frequency, s = 0, and the largest positive values of this matrix indicate
the input-output pairings that should be used to design the controllers in order to minimize interactions
between the crossed inputs-outputs.
Our identified reduced model yields:
R(0) =
1.09 −0.09
−0.09 1.09
(7.2)
, indicating that the VBPH - chamber pressure and VBPO - mixture ratio pairings are the most
suitable to design the two PID controllers.
The bode plots of the scaled open-loop transfer functions of the system, in figure 7.2, confirm the
stronger influence of the VBPH over the chamber pressure and of the VBPO over the mixture ratio.
Our approach to design the control law consists of the following steps:
56
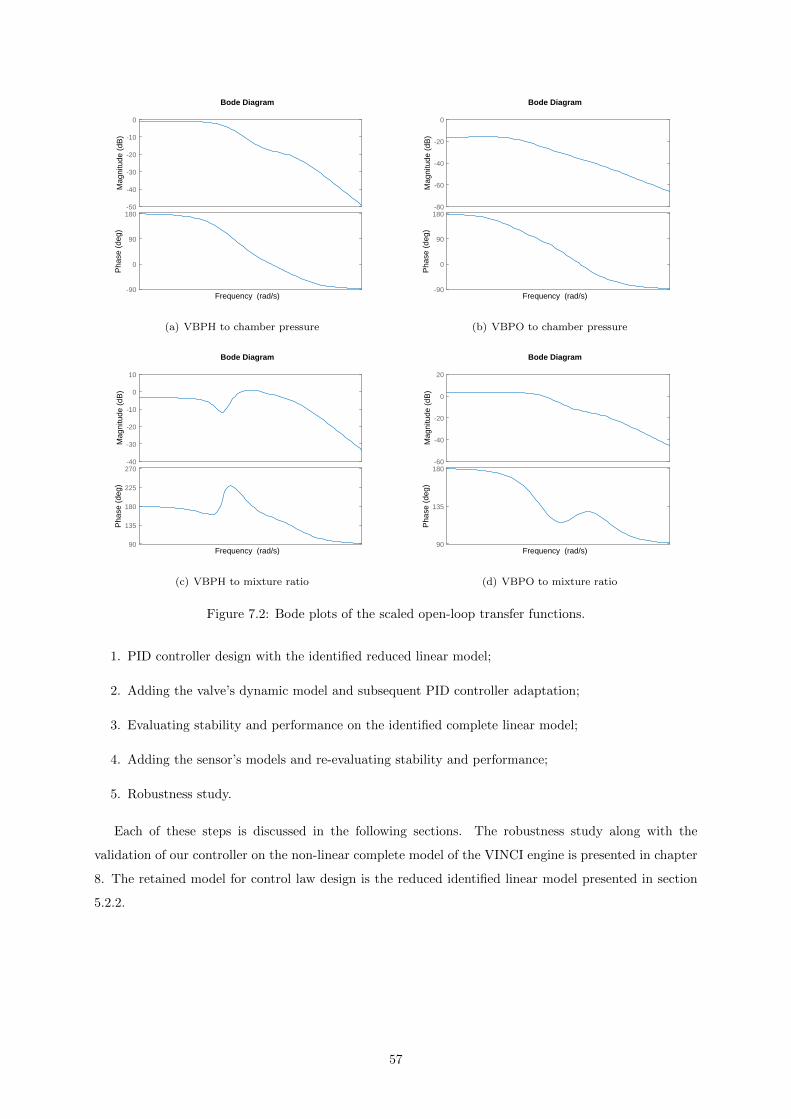
Mag
nitu
de (
dB)
-50
-40
-30
-20
-10
0P
hase
(de
g)
-90
0
90
180
Bode Diagram
Frequency (rad/s)
(a) VBPH to chamber pressure
Mag
nitu
de (
dB)
-80
-60
-40
-20
0
Pha
se (
deg)
-90
0
90
180
Bode Diagram
Frequency (rad/s)
(b) VBPO to chamber pressure
Mag
nitu
de (
dB)
-40
-30
-20
-10
0
10
Pha
se (
deg)
90
135
180
225
270
Bode Diagram
Frequency (rad/s)
(c) VBPH to mixture ratio
Mag
nitu
de (
dB)
-60
-40
-20
0
20
Pha
se (
deg)
90
135
180
Bode Diagram
Frequency (rad/s)
(d) VBPO to mixture ratio
Figure 7.2: Bode plots of the scaled open-loop transfer functions.
1. PID controller design with the identified reduced linear model;
2. Adding the valve’s dynamic model and subsequent PID controller adaptation;
3. Evaluating stability and performance on the identified complete linear model;
4. Adding the sensor’s models and re-evaluating stability and performance;
5. Robustness study.
Each of these steps is discussed in the following sections. The robustness study along with the
validation of our controller on the non-linear complete model of the VINCI engine is presented in chapter
8. The retained model for control law design is the reduced identified linear model presented in section
5.2.2.
57
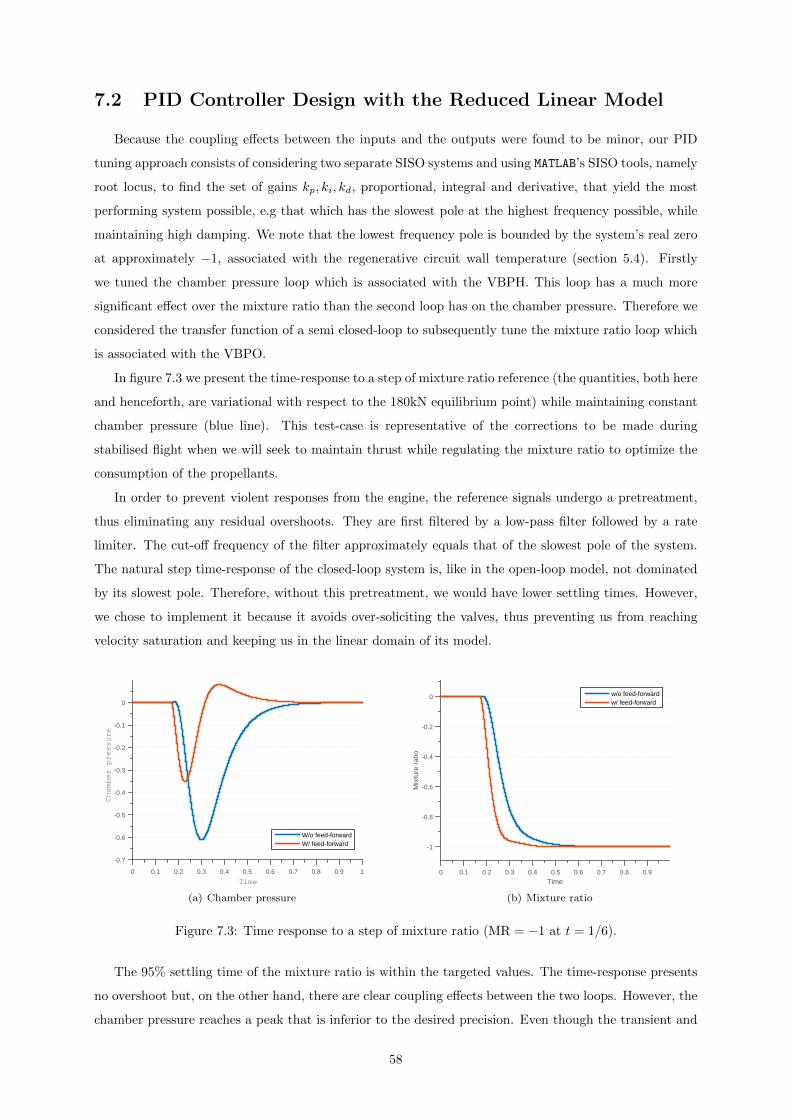
7.2 PID Controller Design with the Reduced Linear Model
Because the coupling effects between the inputs and the outputs were found to be minor, our PID
tuning approach consists of considering two separate SISO systems and using MATLAB’s SISO tools, namely
root locus, to find the set of gains kp, ki, kd, proportional, integral and derivative, that yield the most
performing system possible, e.g that which has the slowest pole at the highest frequency possible, while
maintaining high damping. We note that the lowest frequency pole is bounded by the system’s real zero
at approximately −1, associated with the regenerative circuit wall temperature (section 5.4). Firstly
we tuned the chamber pressure loop which is associated with the VBPH. This loop has a much more
significant effect over the mixture ratio than the second loop has on the chamber pressure. Therefore we
considered the transfer function of a semi closed-loop to subsequently tune the mixture ratio loop which
is associated with the VBPO.
In figure 7.3 we present the time-response to a step of mixture ratio reference (the quantities, both here
and henceforth, are variational with respect to the 180kN equilibrium point) while maintaining constant
chamber pressure (blue line). This test-case is representative of the corrections to be made during
stabilised flight when we will seek to maintain thrust while regulating the mixture ratio to optimize the
consumption of the propellants.
In order to prevent violent responses from the engine, the reference signals undergo a pretreatment,
thus eliminating any residual overshoots. They are first filtered by a low-pass filter followed by a rate
limiter. The cut-off frequency of the filter approximately equals that of the slowest pole of the system.
The natural step time-response of the closed-loop system is, like in the open-loop model, not dominated
by its slowest pole. Therefore, without this pretreatment, we would have lower settling times. However,
we chose to implement it because it avoids over-soliciting the valves, thus preventing us from reaching
velocity saturation and keeping us in the linear domain of its model.
Time
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Chamber pressure
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
W/o feed-forwardW/ feed-forward
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0 w/o feed-forwardw/ feed-forward
(b) Mixture ratio
Figure 7.3: Time response to a step of mixture ratio (MR = −1 at t = 1/6).
The 95% settling time of the mixture ratio is within the targeted values. The time-response presents
no overshoot but, on the other hand, there are clear coupling effects between the two loops. However, the
chamber pressure reaches a peak that is inferior to the desired precision. Even though the transient and
58
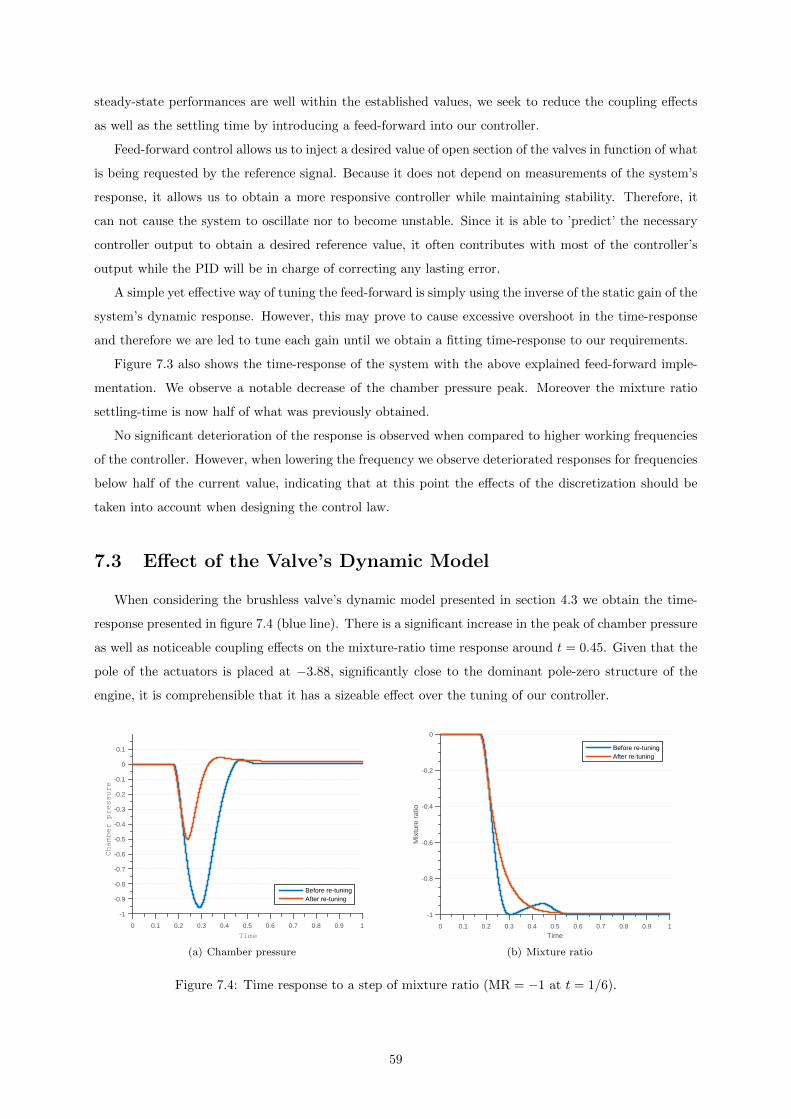
steady-state performances are well within the established values, we seek to reduce the coupling effects
as well as the settling time by introducing a feed-forward into our controller.
Feed-forward control allows us to inject a desired value of open section of the valves in function of what
is being requested by the reference signal. Because it does not depend on measurements of the system’s
response, it allows us to obtain a more responsive controller while maintaining stability. Therefore, it
can not cause the system to oscillate nor to become unstable. Since it is able to ’predict’ the necessary
controller output to obtain a desired reference value, it often contributes with most of the controller’s
output while the PID will be in charge of correcting any lasting error.
A simple yet effective way of tuning the feed-forward is simply using the inverse of the static gain of the
system’s dynamic response. However, this may prove to cause excessive overshoot in the time-response
and therefore we are led to tune each gain until we obtain a fitting time-response to our requirements.
Figure 7.3 also shows the time-response of the system with the above explained feed-forward imple-
mentation. We observe a notable decrease of the chamber pressure peak. Moreover the mixture ratio
settling-time is now half of what was previously obtained.
No significant deterioration of the response is observed when compared to higher working frequencies
of the controller. However, when lowering the frequency we observe deteriorated responses for frequencies
below half of the current value, indicating that at this point the effects of the discretization should be
taken into account when designing the control law.
7.3 Effect of the Valve’s Dynamic Model
When considering the brushless valve’s dynamic model presented in section 4.3 we obtain the time-
response presented in figure 7.4 (blue line). There is a significant increase in the peak of chamber pressure
as well as noticeable coupling effects on the mixture-ratio time response around t = 0.45. Given that the
pole of the actuators is placed at −3.88, significantly close to the dominant pole-zero structure of the
engine, it is comprehensible that it has a sizeable effect over the tuning of our controller.
Time
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Chamber pressure
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
Before re-tuningAfter re-tuning
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
-1
-0.8
-0.6
-0.4
-0.2
0
Before re-tuningAfter re-tuning
(b) Mixture ratio
Figure 7.4: Time response to a step of mixture ratio (MR = −1 at t = 1/6).
59
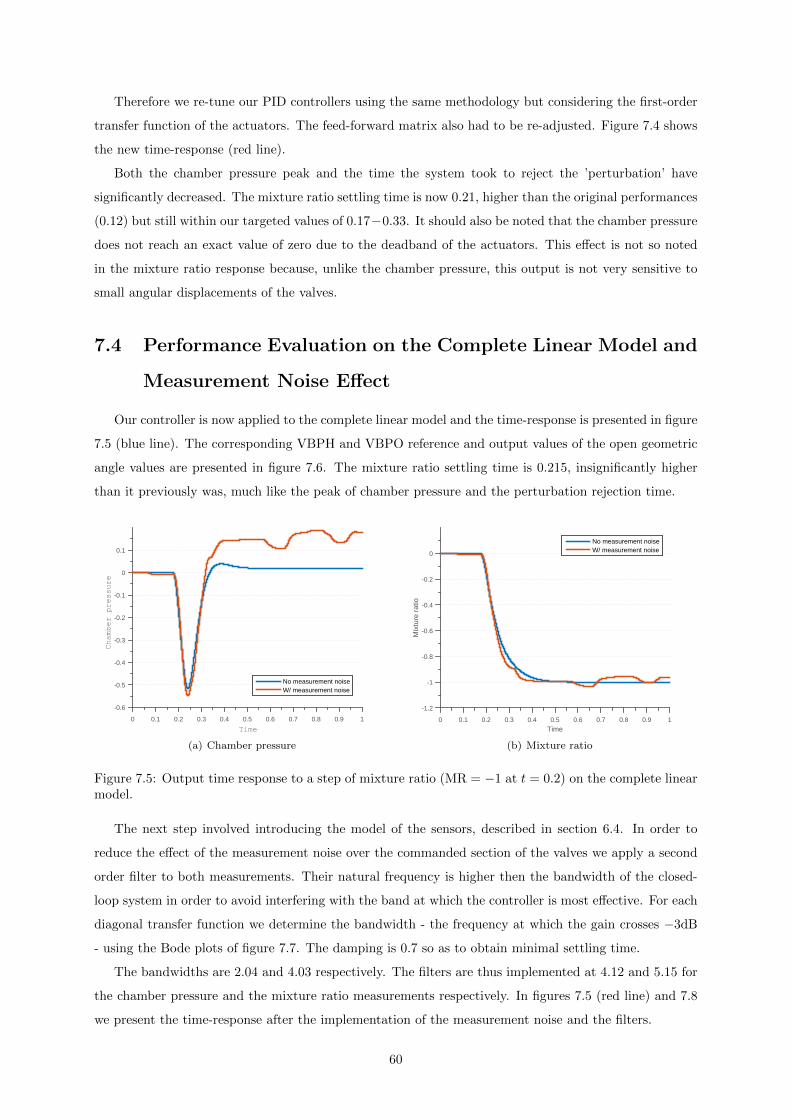
Therefore we re-tune our PID controllers using the same methodology but considering the first-order
transfer function of the actuators. The feed-forward matrix also had to be re-adjusted. Figure 7.4 shows
the new time-response (red line).
Both the chamber pressure peak and the time the system took to reject the ’perturbation’ have
significantly decreased. The mixture ratio settling time is now 0.21, higher than the original performances
(0.12) but still within our targeted values of 0.17−0.33. It should also be noted that the chamber pressure
does not reach an exact value of zero due to the deadband of the actuators. This effect is not so noted
in the mixture ratio response because, unlike the chamber pressure, this output is not very sensitive to
small angular displacements of the valves.
7.4 Performance Evaluation on the Complete Linear Model and
Measurement Noise Effect
Our controller is now applied to the complete linear model and the time-response is presented in figure
7.5 (blue line). The corresponding VBPH and VBPO reference and output values of the open geometric
angle values are presented in figure 7.6. The mixture ratio settling time is 0.215, insignificantly higher
than it previously was, much like the peak of chamber pressure and the perturbation rejection time.
Time
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Chamber pressure
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
No measurement noiseW/ measurement noise
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
No measurement noiseW/ measurement noise
(b) Mixture ratio
Figure 7.5: Output time response to a step of mixture ratio (MR = −1 at t = 0.2) on the complete linearmodel.
The next step involved introducing the model of the sensors, described in section 6.4. In order to
reduce the effect of the measurement noise over the commanded section of the valves we apply a second
order filter to both measurements. Their natural frequency is higher then the bandwidth of the closed-
loop system in order to avoid interfering with the band at which the controller is most effective. For each
diagonal transfer function we determine the bandwidth - the frequency at which the gain crosses −3dB
- using the Bode plots of figure 7.7. The damping is 0.7 so as to obtain minimal settling time.
The bandwidths are 2.04 and 4.03 respectively. The filters are thus implemented at 4.12 and 5.15 for
the chamber pressure and the mixture ratio measurements respectively. In figures 7.5 (red line) and 7.8
we present the time-response after the implementation of the measurement noise and the filters.
60
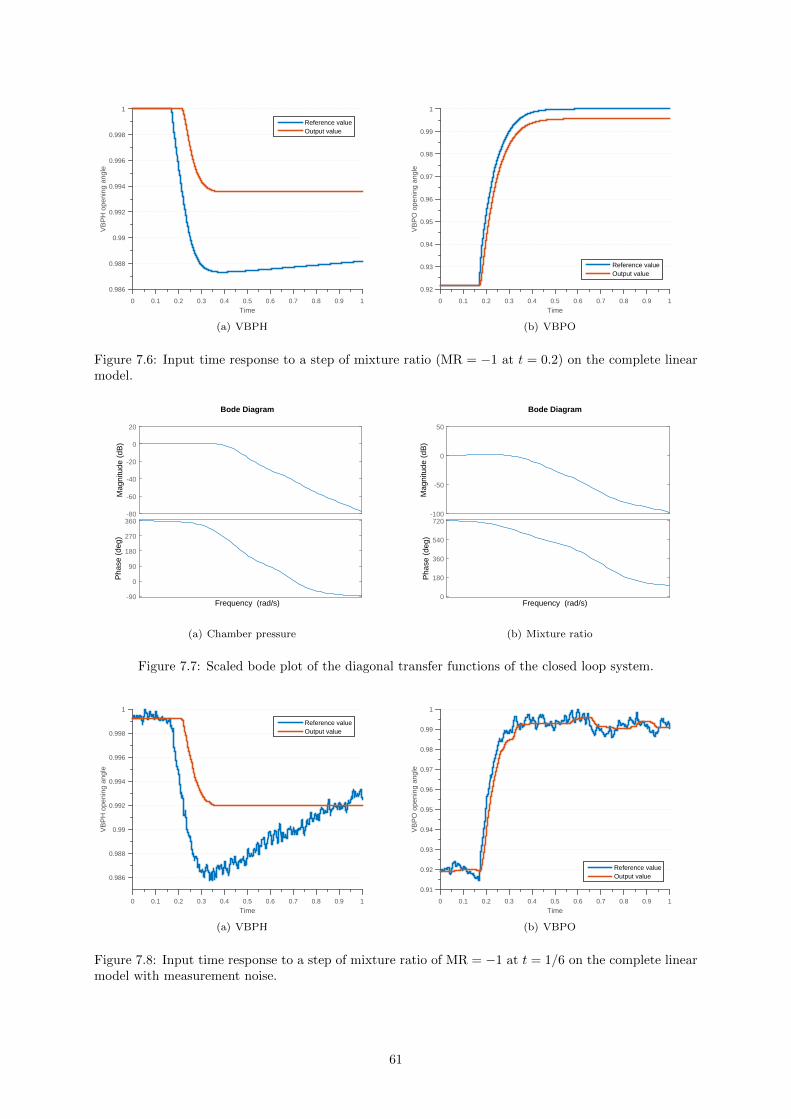
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PH
ope
ning
ang
le
0.986
0.988
0.99
0.992
0.994
0.996
0.998
1
Reference valueOutput value
(a) VBPH
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PO
ope
ning
ang
le
0.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
Reference valueOutput value
(b) VBPO
Figure 7.6: Input time response to a step of mixture ratio (MR = −1 at t = 0.2) on the complete linearmodel.
Mag
nitu
de (
dB)
-80
-60
-40
-20
0
20
Pha
se (
deg)
-90
0
90
180
270
360
Bode Diagram
Frequency (rad/s)
(a) Chamber pressure
Mag
nitu
de (
dB)
-100
-50
0
50P
hase
(de
g)
0
180
360
540
720
Bode Diagram
Frequency (rad/s)
(b) Mixture ratio
Figure 7.7: Scaled bode plot of the diagonal transfer functions of the closed loop system.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PH
ope
ning
ang
le
0.986
0.988
0.99
0.992
0.994
0.996
0.998
1
Reference valueOutput value
(a) VBPH
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PO
ope
ning
ang
le
0.91
0.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
Reference valueOutput value
(b) VBPO
Figure 7.8: Input time response to a step of mixture ratio of MR = −1 at t = 1/6 on the complete linearmodel with measurement noise.
61
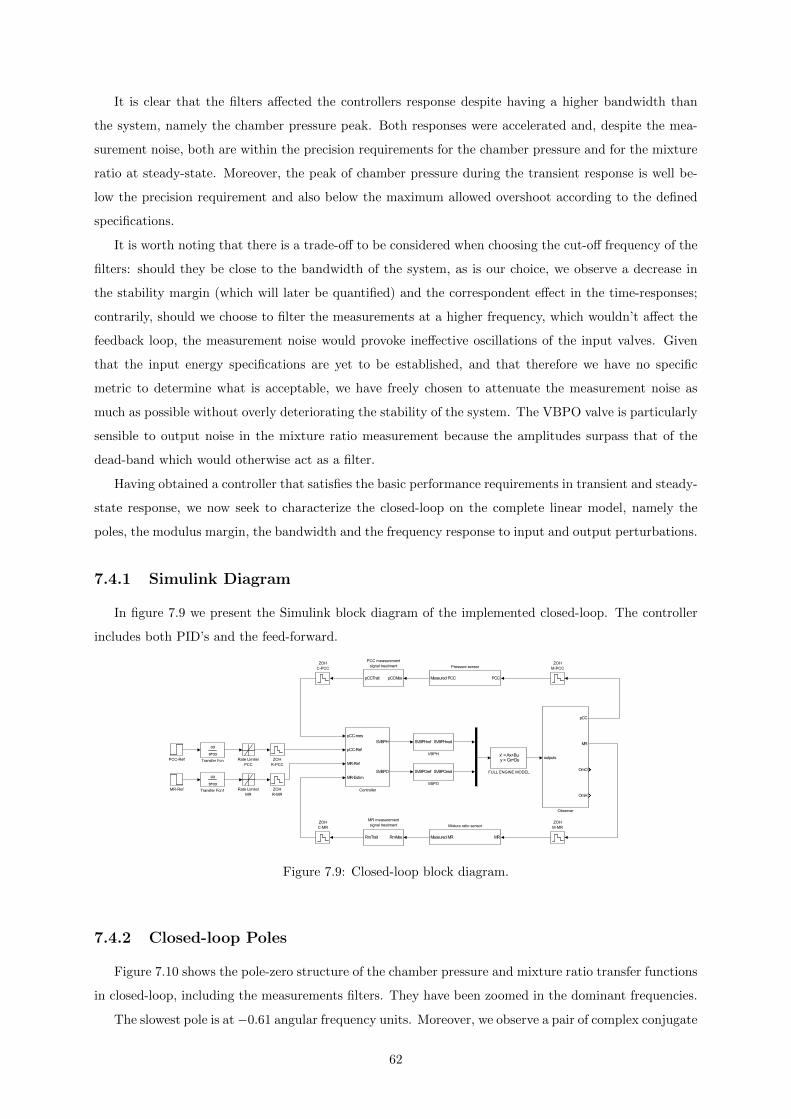
It is clear that the filters affected the controllers response despite having a higher bandwidth than
the system, namely the chamber pressure peak. Both responses were accelerated and, despite the mea-
surement noise, both are within the precision requirements for the chamber pressure and for the mixture
ratio at steady-state. Moreover, the peak of chamber pressure during the transient response is well be-
low the precision requirement and also below the maximum allowed overshoot according to the defined
specifications.
It is worth noting that there is a trade-off to be considered when choosing the cut-off frequency of the
filters: should they be close to the bandwidth of the system, as is our choice, we observe a decrease in
the stability margin (which will later be quantified) and the correspondent effect in the time-responses;
contrarily, should we choose to filter the measurements at a higher frequency, which wouldn’t affect the
feedback loop, the measurement noise would provoke ineffective oscillations of the input valves. Given
that the input energy specifications are yet to be established, and that therefore we have no specific
metric to determine what is acceptable, we have freely chosen to attenuate the measurement noise as
much as possible without overly deteriorating the stability of the system. The VBPO valve is particularly
sensible to output noise in the mixture ratio measurement because the amplitudes surpass that of the
dead-band which would otherwise act as a filter.
Having obtained a controller that satisfies the basic performance requirements in transient and steady-
state response, we now seek to characterize the closed-loop on the complete linear model, namely the
poles, the modulus margin, the bandwidth and the frequency response to input and output perturbations.
7.4.1 Simulink Diagram
In figure 7.9 we present the Simulink block diagram of the implemented closed-loop. The controller
includes both PID’s and the feed-forward.
x' = Ax+Bu y = Cx+Du
FULL ENGINE MODEL
SVBPHref SVBPHreal
VBPH
SVBPOref SVBPOreal
VBPO
PCC-Ref
MR-Ref
pCC-mes
pCC-Ref
MR-Ref
MR-Estim
SVBPH
SVBPO
Controller
outputs
pCC
MR
OmO
OmH
Observer
pCCMespCCTrait
PCC measurement
signal treatment
PCCMeasured PCC
Pressure sensor
RmMesRmTrait
MR measurement
signal treatment
MRMeasured MR
Mixture ratio sensor
Rate Limiter
PCC
Rate Limiter
MR
co
s+co
Transfer Fcn
co
s+co
Transfer Fcn1 ZOH
R-MR
ZOH
R-PCC
ZOH
C-PCC
ZOH
C-MR
ZOH
M-PCC
ZOH
M-MR
Figure 7.9: Closed-loop block diagram.
7.4.2 Closed-loop Poles
Figure 7.10 shows the pole-zero structure of the chamber pressure and mixture ratio transfer functions
in closed-loop, including the measurements filters. They have been zoomed in the dominant frequencies.
The slowest pole is at−0.61 angular frequency units. Moreover, we observe a pair of complex conjugate
62
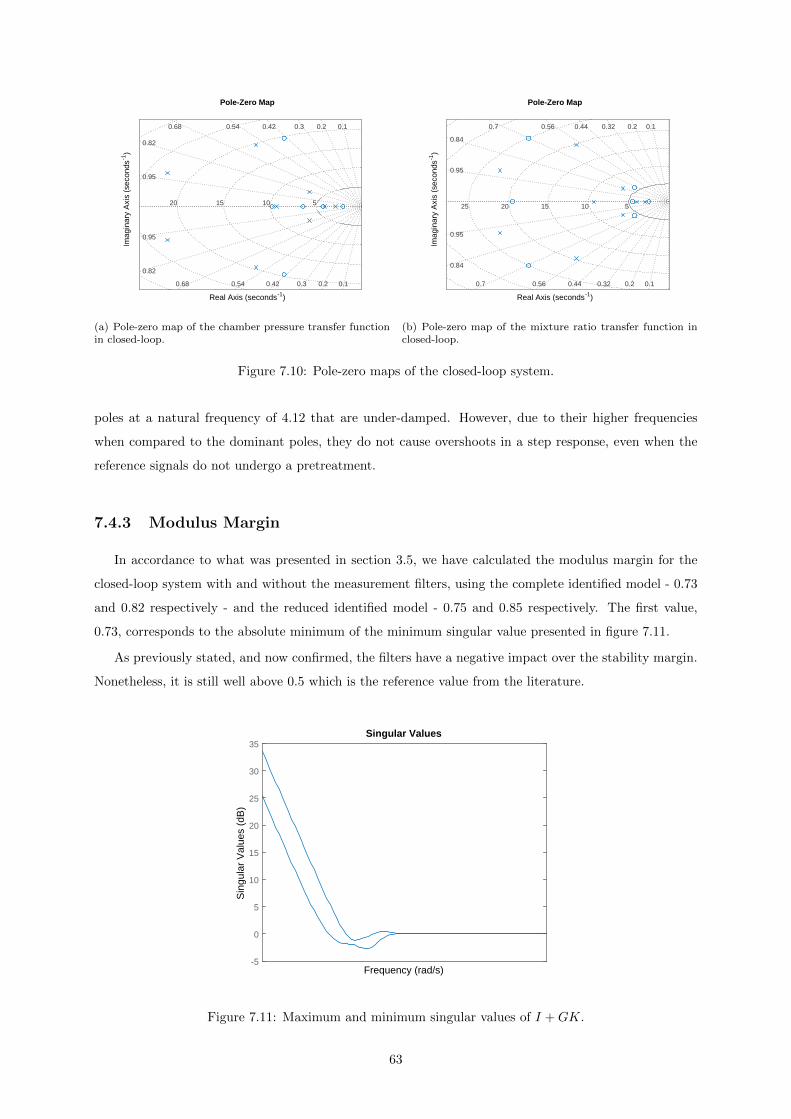
0.1
0.1
0.2
0.2
5
0.3
0.3
0.42
0.42
10
0.54
0.54
15
0.68
0.68
20
0.82
0.95
0.82
0.95
Pole-Zero Map
Real Axis (seconds-1)
Imag
inar
y A
xis
(sec
onds
-1)
(a) Pole-zero map of the chamber pressure transfer functionin closed-loop.
0.1
0.1
0.2
0.2
5
0.32
0.32
10
0.44
0.44
0.56
15
0.56
20
0.7
0.7
25
0.84
0.95
0.84
0.95
Pole-Zero Map
Real Axis (seconds-1)
Imag
inar
y A
xis
(sec
onds
-1)
(b) Pole-zero map of the mixture ratio transfer function inclosed-loop.
Figure 7.10: Pole-zero maps of the closed-loop system.
poles at a natural frequency of 4.12 that are under-damped. However, due to their higher frequencies
when compared to the dominant poles, they do not cause overshoots in a step response, even when the
reference signals do not undergo a pretreatment.
7.4.3 Modulus Margin
In accordance to what was presented in section 3.5, we have calculated the modulus margin for the
closed-loop system with and without the measurement filters, using the complete identified model - 0.73
and 0.82 respectively - and the reduced identified model - 0.75 and 0.85 respectively. The first value,
0.73, corresponds to the absolute minimum of the minimum singular value presented in figure 7.11.
As previously stated, and now confirmed, the filters have a negative impact over the stability margin.
Nonetheless, it is still well above 0.5 which is the reference value from the literature.
-5
0
5
10
15
20
25
30
35Singular Values
Frequency (rad/s)
Sin
gula
r V
alue
s (d
B)
Figure 7.11: Maximum and minimum singular values of I +GK.
63

While the gain and phase margins can not be generalized for MIMO systems, we can still evaluate
stability in particular directions, namely for the four transfer functions of the closed-loop system. Their
values are summarized in table 7.1.
Table 7.1: Gain and phase margins for each transfer function of the closed-loop.
Pc to P MRc to P Pc to MR MRc to MR
Gain margin 9.33 44.45 10.65 4.96
Phase margin (deg) 73.0 90.0 77.0 74.7
7.4.4 Frequency Response
As previously explained, MIMO systems possess an extra degree of freedom when analysing its fre-
quency response. The directionality of the input affects the gain while the concept of phase is non-existent.
As a consequence, in order to characterize the system’s frequency response, we opt to present its maxi-
mum and minimum singular values at each frequency. The results are shown in figure 7.12. In order to
obtain a righteous frequency analysis the transfer matrices were scaled according to what was presented
in section 3.5.
The reference input to output singular values graph shows, as expected, that the steady-state error
is null. At higher frequencies the reference is filtered by the system.
The input perturbation (VBPH and VBPO open sections) to output graph demonstrates that the
perturbations are attenuated at all frequencies. Most notably, constant perturbations are completely
rejected due to the presence of the integrators in the control law. At high frequencies, in the worst case
scenario, they are attenuated by more than 20dB.
The measurement perturbation to input frequency response is very sensible to scaling. Nonetheless,
what we can conclude from the graph is that steady-state perturbations are not rejected by the controller,
while high frequency perturbations are increasingly filtered.
Lastly, the reference to setpoint error graph shows us that the controller is most effective under an
angular frequency of 0.62−0.82. Beyond this frequency it is not capable of following the reference signal.
Note that the deadband of the actuators, the effect of which, being a non-linear block, is not considered
in the graphs, acts as a filter for low amplitude perturbations both at the input and at the output.
Despite finding frequency responses that fit the desired shapes at low and high frequencies, the PID
controller does not offer us the means to impose a precise frequency template. Similarly, the coupling
between the inputs and the outputs, as low as it may be in our case, prevents us from obtaining the exact
desired closed-loop poles. Finally, it is not necessarily evident how to obtain a controller which yields a
safe modulus margin. In spite of these disadvantages, we find the tuned controller to fulfil the established
requirements.
64
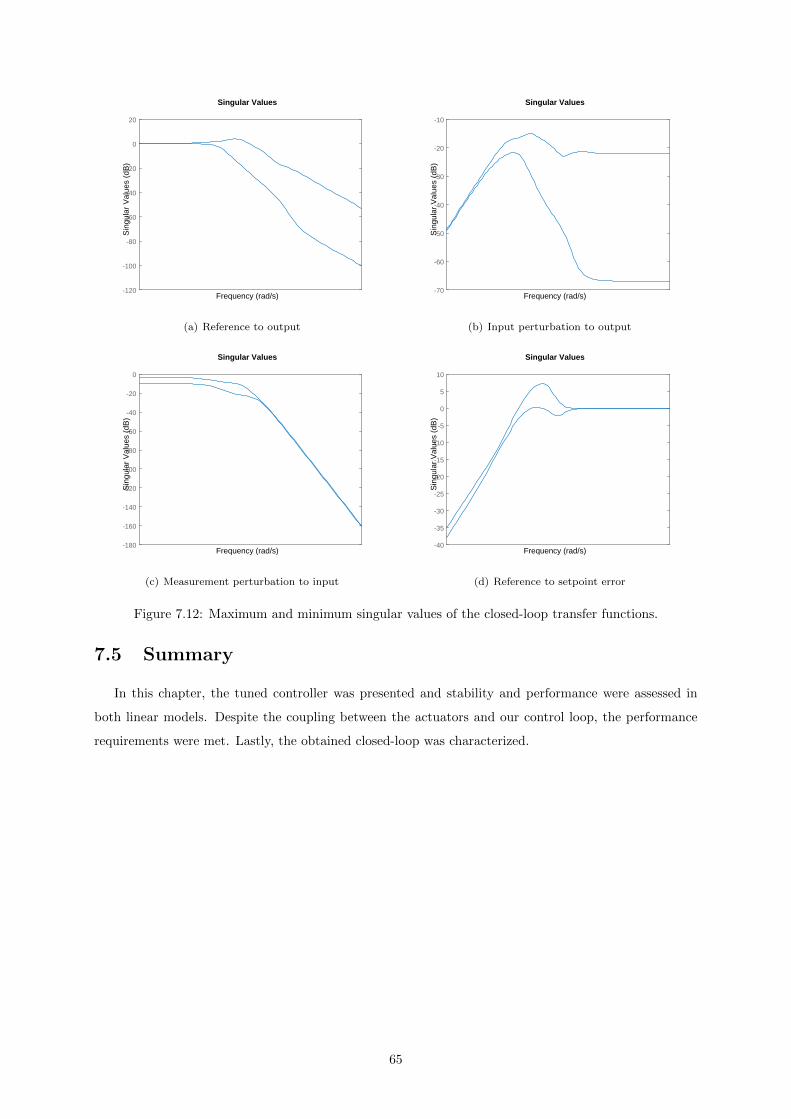
-120
-100
-80
-60
-40
-20
0
20
Singular Values
Frequency (rad/s)
Sin
gula
r V
alue
s (d
B)
(a) Reference to output
-70
-60
-50
-40
-30
-20
-10
Singular Values
Frequency (rad/s)
Sin
gula
r V
alue
s (d
B)
(b) Input perturbation to output
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
Singular Values
Frequency (rad/s)
Sin
gula
r V
alue
s (d
B)
(c) Measurement perturbation to input
-40
-35
-30
-25
-20
-15
-10
-5
0
5
10
Singular Values
Frequency (rad/s)
Sin
gula
r V
alue
s (d
B)
(d) Reference to setpoint error
Figure 7.12: Maximum and minimum singular values of the closed-loop transfer functions.
7.5 Summary
In this chapter, the tuned controller was presented and stability and performance were assessed in
both linear models. Despite the coupling between the actuators and our control loop, the performance
requirements were met. Lastly, the obtained closed-loop was characterized.
65

66
Chapter 8
Results
In this chapter, the stability and performance of the closed-loop engine is assessed through a simplified
flight simulation using the complete non-linear model. The control specifications are verified for the
nominal model of the VINCI engine. We then proceed to effectuate a robustness study to parameter
uncertainty. Finally, we assess the engine’s robustness to failure cases and provide one example in the
form of a temporal simulation.
8.1 Flight Simulation on the CARINS Non-linear Model
The non-linear model provides us with access to all state variables, in the broad sense, of every
component modelling the engine, namely to the inlet temperature and pressure of the pumps. It is
therefore ideal to simulate a flight with the input perturbations defined in section 6.6 and to verify the
mechanical and thermal bounds presented in section 6.7.
The flight simulation is defined in figure 8.1. Firstly we seek to maintain the 180kN thrust regime
with a small mixture ratio correction that is representative of the requests made by the PAM system. The
system then trasitions to the 130kN low thrust regime, followed by another small mixture ratio correction.
We also introduced input perturbations that increase linearly with time at the inlet temperature and
pressure of both pumps. These are representative of the changing inlet conditions during flight due to
the heating of the tanks. The engine ageing is modelled through a changing thermal flux between the
combustion chamber and the regenerative circuit. A degradation of the hot wall surface between these
two components is to be taken into account by an increasing section. Other parameters will assume their
nominal value.
In figure 8.2 we present the results of the simulation by displaying the temporal evolution of the
chamber pressure, as well as its admissible bounds, the mixture ratio, and the VBPH and VBPO opening
angles, both the reference and the measurement.
The admissible bounds of chamber pressure are respected in both regimes. No mixture ratio bounds
are depicted but we still want to highlight that this quantity respects its admissible interval of [0.66,1.23].
Note that this interval is associated with combustion stability conditions which remains, to this day, an
67
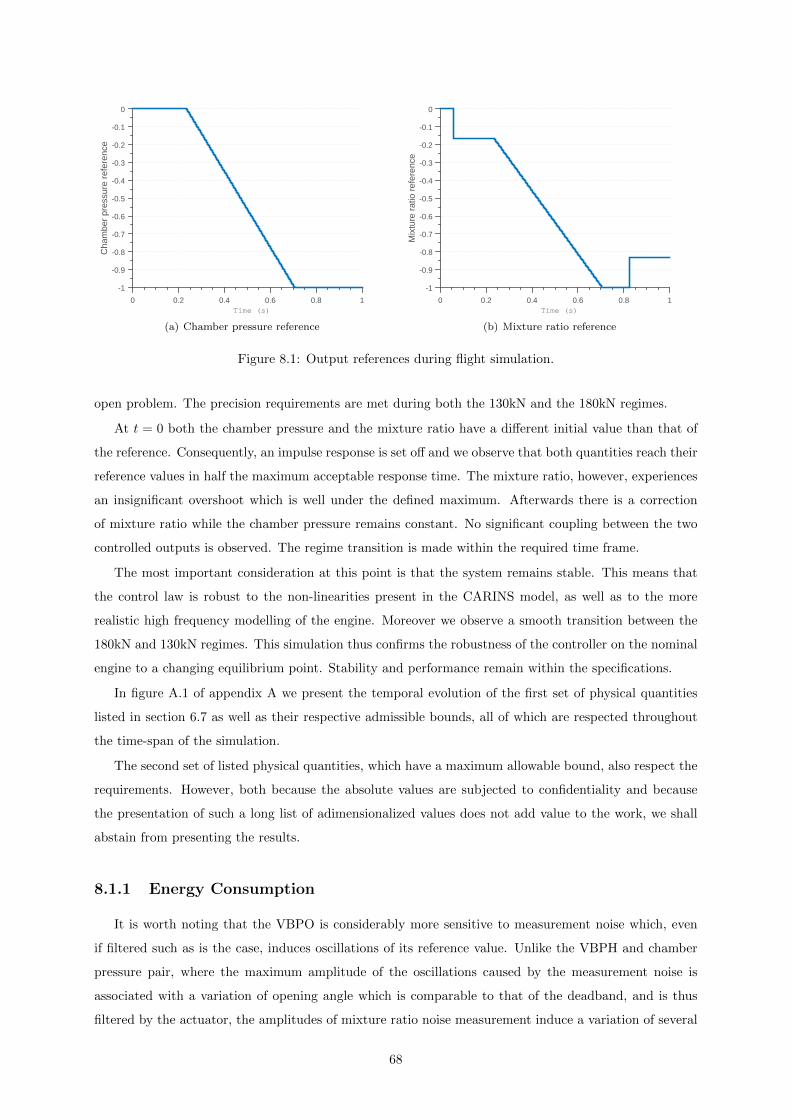
Time (s)0 0.2 0.4 0.6 0.8 1
Cha
mbe
r pr
essu
re r
efer
ence
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
(a) Chamber pressure reference
Time (s)0 0.2 0.4 0.6 0.8 1
Mix
ture
rat
io r
efer
ence
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
(b) Mixture ratio reference
Figure 8.1: Output references during flight simulation.
open problem. The precision requirements are met during both the 130kN and the 180kN regimes.
At t = 0 both the chamber pressure and the mixture ratio have a different initial value than that of
the reference. Consequently, an impulse response is set off and we observe that both quantities reach their
reference values in half the maximum acceptable response time. The mixture ratio, however, experiences
an insignificant overshoot which is well under the defined maximum. Afterwards there is a correction
of mixture ratio while the chamber pressure remains constant. No significant coupling between the two
controlled outputs is observed. The regime transition is made within the required time frame.
The most important consideration at this point is that the system remains stable. This means that
the control law is robust to the non-linearities present in the CARINS model, as well as to the more
realistic high frequency modelling of the engine. Moreover we observe a smooth transition between the
180kN and 130kN regimes. This simulation thus confirms the robustness of the controller on the nominal
engine to a changing equilibrium point. Stability and performance remain within the specifications.
In figure A.1 of appendix A we present the temporal evolution of the first set of physical quantities
listed in section 6.7 as well as their respective admissible bounds, all of which are respected throughout
the time-span of the simulation.
The second set of listed physical quantities, which have a maximum allowable bound, also respect the
requirements. However, both because the absolute values are subjected to confidentiality and because
the presentation of such a long list of adimensionalized values does not add value to the work, we shall
abstain from presenting the results.
8.1.1 Energy Consumption
It is worth noting that the VBPO is considerably more sensitive to measurement noise which, even
if filtered such as is the case, induces oscillations of its reference value. Unlike the VBPH and chamber
pressure pair, where the maximum amplitude of the oscillations caused by the measurement noise is
associated with a variation of opening angle which is comparable to that of the deadband, and is thus
filtered by the actuator, the amplitudes of mixture ratio noise measurement induce a variation of several
68
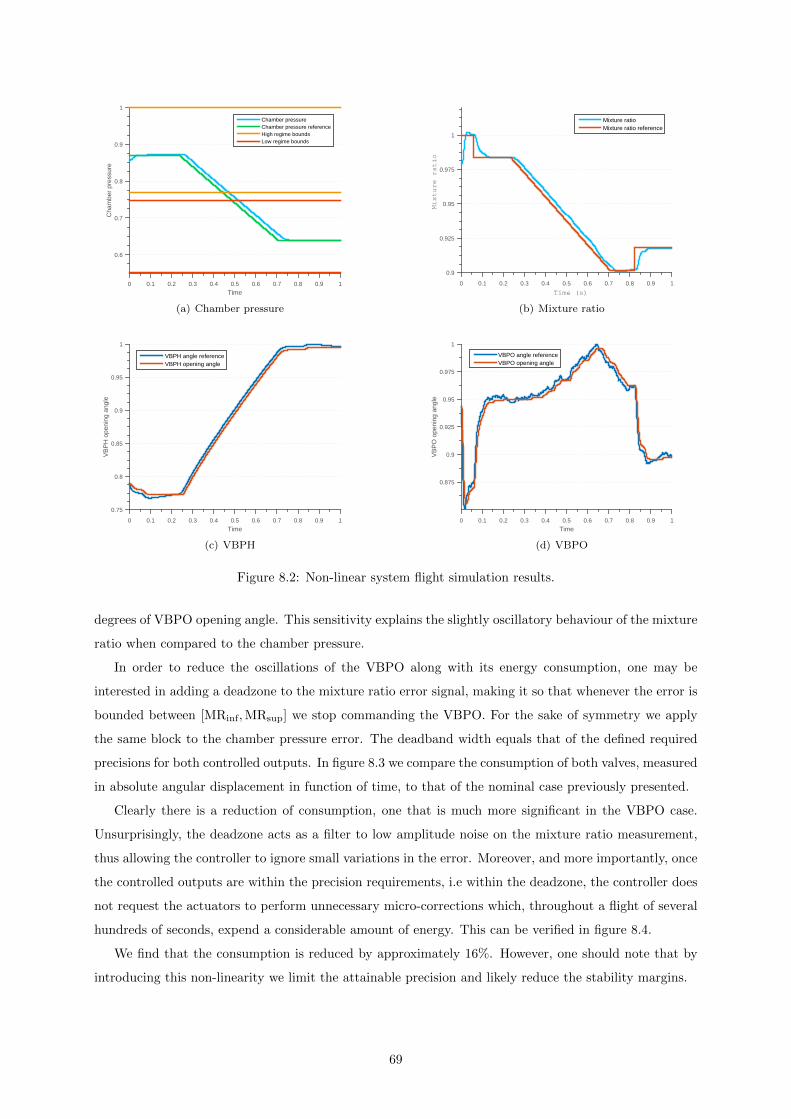
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
0.6
0.7
0.8
0.9
1
Chamber pressureChamber pressure referenceHigh regime boundsLow regime bounds
(a) Chamber pressure
Time (s)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mixture ratio
0.9
0.925
0.95
0.975
1
Mixture ratioMixture ratio reference
(b) Mixture ratio
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PH
ope
ning
ang
le
0.75
0.8
0.85
0.9
0.95
1
VBPH angle referenceVBPH opening angle
(c) VBPH
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PO
ope
ning
ang
le
0.875
0.9
0.925
0.95
0.975
1
VBPO angle referenceVBPO opening angle
(d) VBPO
Figure 8.2: Non-linear system flight simulation results.
degrees of VBPO opening angle. This sensitivity explains the slightly oscillatory behaviour of the mixture
ratio when compared to the chamber pressure.
In order to reduce the oscillations of the VBPO along with its energy consumption, one may be
interested in adding a deadzone to the mixture ratio error signal, making it so that whenever the error is
bounded between [MRinf,MRsup] we stop commanding the VBPO. For the sake of symmetry we apply
the same block to the chamber pressure error. The deadband width equals that of the defined required
precisions for both controlled outputs. In figure 8.3 we compare the consumption of both valves, measured
in absolute angular displacement in function of time, to that of the nominal case previously presented.
Clearly there is a reduction of consumption, one that is much more significant in the VBPO case.
Unsurprisingly, the deadzone acts as a filter to low amplitude noise on the mixture ratio measurement,
thus allowing the controller to ignore small variations in the error. Moreover, and more importantly, once
the controlled outputs are within the precision requirements, i.e within the deadzone, the controller does
not request the actuators to perform unnecessary micro-corrections which, throughout a flight of several
hundreds of seconds, expend a considerable amount of energy. This can be verified in figure 8.4.
We find that the consumption is reduced by approximately 16%. However, one should note that by
introducing this non-linearity we limit the attainable precision and likely reduce the stability margins.
69

Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PH
ope
ning
ang
le
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
W/o deadzoneW/ Deadzone
(a) VBPH
Time0 0.2 0.4 0.6 0.8 1
VB
PO
ope
ning
ang
le
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
W/o deadzoneW/ Deadzone
(b) VBPO
Figure 8.3: Valve consumption comparison when adding a deadzone to the error signals.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
0.6
0.7
0.8
0.9
1
Chamber pressureChamber pressure referenceHigh regime boundsLow regime bounds
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
0.9
0.91
0.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
Mixture ratioMixture ratio reference
(b) Mixture ratio
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PH
ope
ning
ang
le
0.75
0.8
0.85
0.9
0.95
1
VBPH angle referenceVBPH opening angle
(c) VBPH
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PO
ope
ning
ang
le
0.875
0.9
0.925
0.95
0.975
1
VBPO angle referenceVBPO opening angle
(d) VBPO
Figure 8.4: Non-linear system flight simulation results with a dead-band associated to the setpoint error.
70

8.2 Robustness to Parameter Uncertainty
In section 3.6 we mentioned the importance of ensuring that the tuned control law is robust to model
uncertainty, including parametric uncertainty and neglected or unmodelled dynamics. The former is
undoubtedly relevant to our analysis mainly due to component ageing throughout the flight, manufac-
turing tolerances or physical characteristics of the subsystems which are not known with a high degree
of precision. The latter may include non-linearities that evidently are not represented in the linearized
model, unmodelled high frequencies due to the limited scope of the identification method and changing
operating conditions such as when we will transition from the 180kN to the 130kN equilibrium point.
Our validation of the control law will be made in two steps. On the complete linear model we
will simulate flight conditions over a finite set of engine models with varying parameters and operating
conditions. Both stability and performance, which will be quantified hereafter, are to be evaluated over
the uncertainty set.
On the non-linear CARINS model, we have already ensured robustness to the equilibrium point transi-
tion, and guaranteed the stability and performance of the controller in the presence of non-linearities and
more realistic high frequency modelling for the nominal model. The ensemble of the control specifications
listed in section 6 has also been verified for that same model. Hence, in this section we will simulate on
the non-linear model a limited number of the worst cases in terms of stability and performance found
during the linear analysis. Lastly, an upper or lower allowable bound for the failure cases listed in section
6.8 will be determined.
8.2.1 Complete Linear Model
Firstly we define the flight simulation. Figure 8.5 shows the output references of chamber pressure
and mixture ratio with respect to the 180kN equilibrium point. The simulation spans over 1 time unit.
During the initial 0.44 time units we maintain constant chamber pressure but we make a small correction
of mixture ratio at t = 0.27 which is representative of the requests the PAM system will be making during
flight. At t = 0.44 we initiate the equilibrium point transition which lasts precisely 0.11 time units.
Time0 0.2 0.4 0.6 0.8 1
Cha
mbe
r pr
essu
re r
efer
ence
-1
-0.8
-0.6
-0.4
-0.2
0
(a) Chamber pressure reference
Time0 0.2 0.4 0.6 0.8 1
Mix
ture
rat
io r
efer
ence
-1
-0.8
-0.6
-0.4
-0.2
0
(b) Mixture ratio reference
Figure 8.5: Output references during flight simulation.
71
During the simulation we introduce an additive input perturbation which grows linearly over the
simulation time. The final value is 20% of the nominal VBPH and VBPO sections respectively. This
is representative of the slow evolving input perturbations the engine will be subjected to during flight,
namely of inlet temperature and pressure of the pumps.
Stability and performance will be evaluated through several indicators listed below:
1. Modulus margin;
2. Chamber pressure overshoot during the equilibrium point transition;
3. Mixture ratio overshoot during the equilibrium point transition;
4. Maximum difference between the chamber pressure and the chamber pressure reference during the
180kN and 130kN stabilized regimes;
5. Maximum difference between the mixture ratio and the mixture ratio reference during the 180kN
stabilized regime, before and after the step correction, and the 130kN stabilized regime;
6. Chamber pressure and mixture ratio 95% settling time for the equilibrium point transition;
7. Mixture ratio 95% settling time for the correction at t=0.27.
The uncertainty set is required to cover the worst-case scenario which is the engine model for which
our controller renders the closed-loop the closest to instability when compared to the other possible plant
models. Given the extraordinary amount of parameters defining the VINCI engine, we first delved into
identifying, among the uncertain parameters, those for which the system’s dynamics, e.g. the pole-zero
structure and the static gain, are most sensitive to.
The engine ageing is modelled through a changing thermal flux between the combustion chamber and
the regenerative circuit. A degradation of the hot wall surface between these two components is to be
taken into account by a changing interface section Sch.
Other parametric uncertainties with notable effects over the engine’s dynamics include the moments
of inertia of the turbo-pumps (J), the characteristic curves of the hydrogen pump and turbine and the
efficiency of the hydrogen pump (ηH). The hydrogen turbine efficiency is taken into account in its
characteristic curves. The pumps have two characteristic curves describing the pressure output and the
torque. The turbines, on the other hand, also have two characteristic curves but they describe the mass
flow rate and the torque. The uncertainty over the characteristic curves will be modelled through scaling
multiplicative factors EPH, CPH, ETH and CTH respectively. Table 8.1 summarizes the considered
uncertainties. No values can be presented due to confidentiality.
Table 8.1: Studied uncertain parameters.
Parameters JO JH EPH CPH ETH CTH Sch ηH
The uncertainty set includes all of the possible combinations of the bounds of the domains. Its main
disadvantage is that it does not strictly assure us to capture the worst possible configuration for these
72
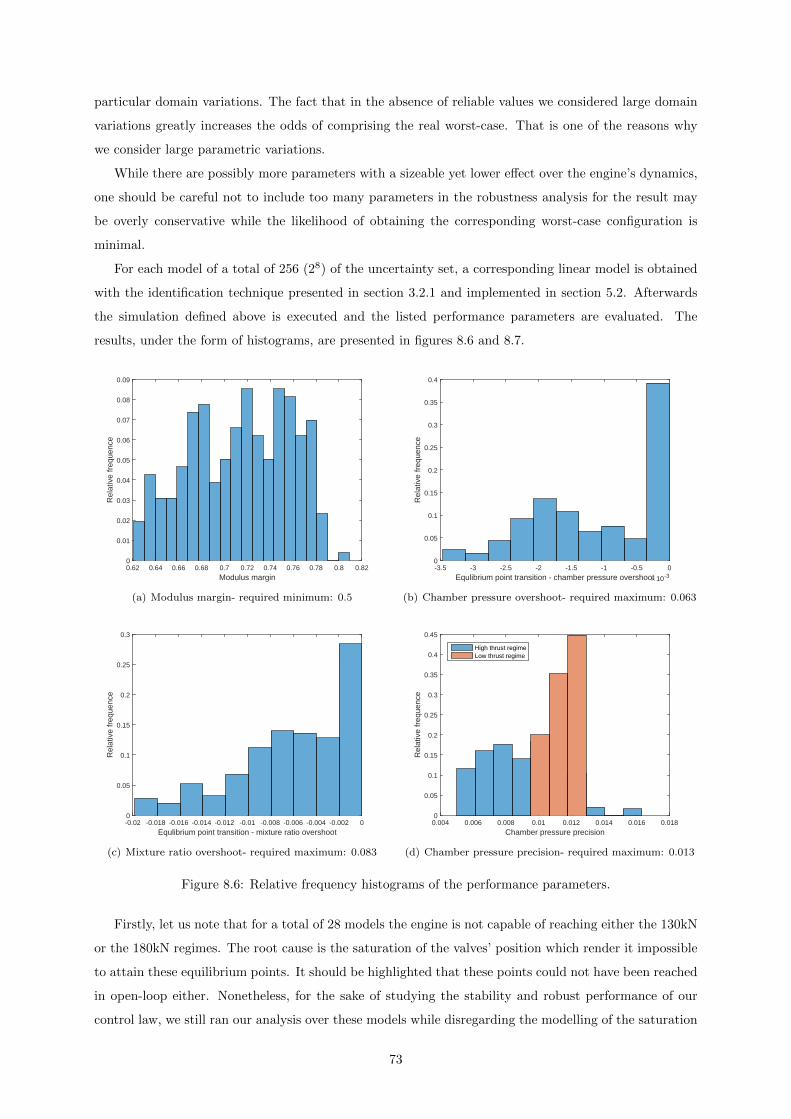
particular domain variations. The fact that in the absence of reliable values we considered large domain
variations greatly increases the odds of comprising the real worst-case. That is one of the reasons why
we consider large parametric variations.
While there are possibly more parameters with a sizeable yet lower effect over the engine’s dynamics,
one should be careful not to include too many parameters in the robustness analysis for the result may
be overly conservative while the likelihood of obtaining the corresponding worst-case configuration is
minimal.
For each model of a total of 256 (28) of the uncertainty set, a corresponding linear model is obtained
with the identification technique presented in section 3.2.1 and implemented in section 5.2. Afterwards
the simulation defined above is executed and the listed performance parameters are evaluated. The
results, under the form of histograms, are presented in figures 8.6 and 8.7.
Modulus margin0.62 0.64 0.66 0.68 0.7 0.72 0.74 0.76 0.78 0.8 0.82
Rel
ativ
e fr
eque
nce
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
(a) Modulus margin- required minimum: 0.5
Equlibrium point transition - chamber pressure overshoot×10-3-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0
Rel
ativ
e fr
eque
nce
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
(b) Chamber pressure overshoot- required maximum: 0.063
Equlibrium point transition - mixture ratio overshoot-0.02 -0.018 -0.016 -0.014 -0.012 -0.01 -0.008 -0.006 -0.004 -0.002 0
Rel
ativ
e fr
eque
nce
0
0.05
0.1
0.15
0.2
0.25
0.3
(c) Mixture ratio overshoot- required maximum: 0.083
Chamber pressure precision0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018
Rel
ativ
e fr
eque
nce
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
High thrust regimeLow thrust regime
(d) Chamber pressure precision- required maximum: 0.013
Figure 8.6: Relative frequency histograms of the performance parameters.
Firstly, let us note that for a total of 28 models the engine is not capable of reaching either the 130kN
or the 180kN regimes. The root cause is the saturation of the valves’ position which render it impossible
to attain these equilibrium points. It should be highlighted that these points could not have been reached
in open-loop either. Nonetheless, for the sake of studying the stability and robust performance of our
control law, we still ran our analysis over these models while disregarding the modelling of the saturation
73

Mixture ratio precision0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
Rel
ativ
e fr
eque
nce
0
0.05
0.1
0.15
0.2
0.25
0.3
High thrust regimeLow thrust regime
(a) Mixture ratio precision- required maximum: 0.033
Equilibrium point transition - chamber pressure settling time0.1095 0.11 0.1105 0.111 0.1115 0.112 0.1125 0.113
Rel
ativ
e fr
eque
nce
0
0.05
0.1
0.15
0.2
0.25
(b) Chamber pressure settling time- reference value: 0.1096
Equilibrium point transition - mixture ratio settling time0.104 0.105 0.106 0.107 0.108 0.109 0.11 0.111 0.112
Rel
ativ
e fr
eque
nce
0
0.05
0.1
0.15
0.2
0.25
0.3
(c) Mixture ratio settling time- reference value: 0.1096
Mixture ratio correction settling time0.01 0.012 0.014 0.016 0.018 0.02 0.022 0.024 0.026 0.028
Rel
ativ
e fr
eque
nce
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
(d) Mixture ratio correction settling time- required maxi-mum: 0.028
Figure 8.7: Relative frequency histograms of the performance parameters.
of the valves. Our conclusions about the control law are valid even though in reality the engine can
not handle these extreme cases. Both because the project is still in an early phase and because we use
very conservative data about the uncertainties, we will refrain from trying to quantify the probability
of having said cases. Moreover we point out that the modelling of the valves is not final, namely the
relationship between the open angle and the open section. Further information about the modelling of
the VINCI engine may be made available in the near future as well.
The modulus margin is consistently higher than 0.5 which is our reference value from the literature.
Chamber pressure and mixture ratio overshoots are well below the maximum acceptable values. Regarding
the precision, there are only a handful of cases in which the chamber pressure limit is significantly
surpassed. Let us note however that these are singular events, the duration of which is meaningless
throughout the course of the boosted flight. These are therefore acceptable. The mixture ratio, on the
other hand, is kept at all times below the target value. Lastly, the settling times, either for regime
transition or for a correction of mixture ratio, are well within the requirements. While 0.1096 was our
target time for transition, that is also the time the reference values take to reach the 130kN equilibrium
point. Consequently the settling times of both outputs are often higher than this value, to a maximum
74
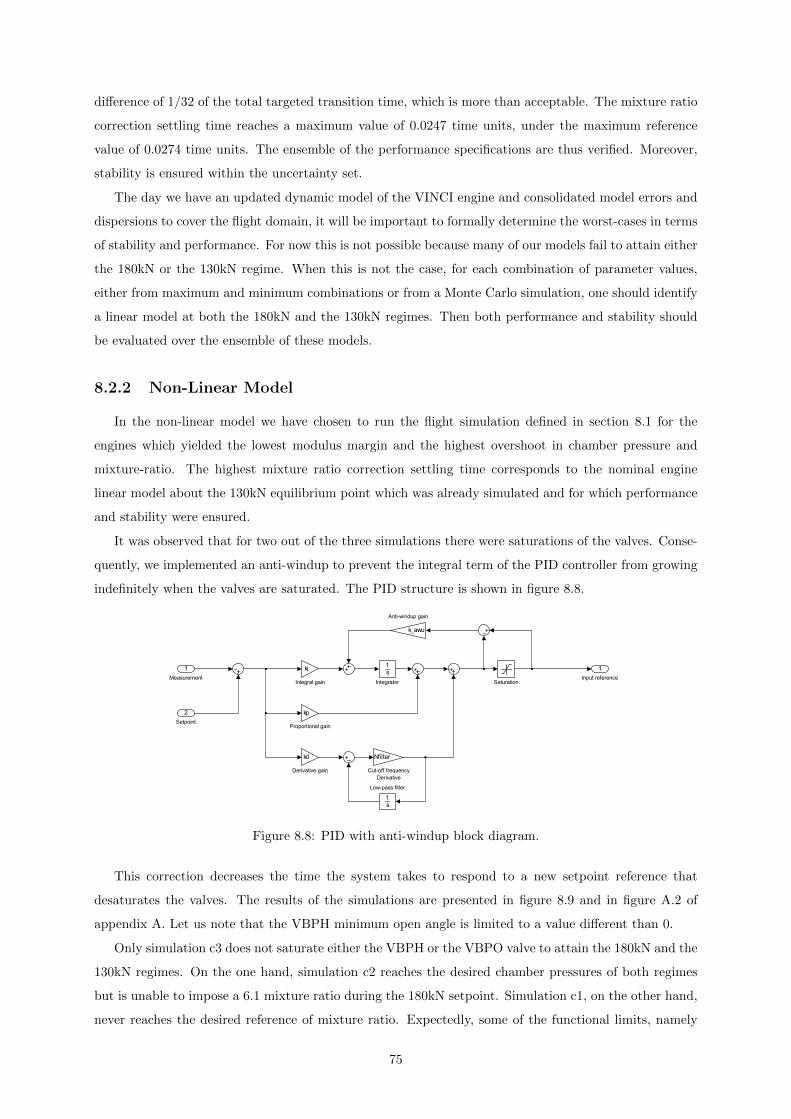
difference of 1/32 of the total targeted transition time, which is more than acceptable. The mixture ratio
correction settling time reaches a maximum value of 0.0247 time units, under the maximum reference
value of 0.0274 time units. The ensemble of the performance specifications are thus verified. Moreover,
stability is ensured within the uncertainty set.
The day we have an updated dynamic model of the VINCI engine and consolidated model errors and
dispersions to cover the flight domain, it will be important to formally determine the worst-cases in terms
of stability and performance. For now this is not possible because many of our models fail to attain either
the 180kN or the 130kN regime. When this is not the case, for each combination of parameter values,
either from maximum and minimum combinations or from a Monte Carlo simulation, one should identify
a linear model at both the 180kN and the 130kN regimes. Then both performance and stability should
be evaluated over the ensemble of these models.
8.2.2 Non-Linear Model
In the non-linear model we have chosen to run the flight simulation defined in section 8.1 for the
engines which yielded the lowest modulus margin and the highest overshoot in chamber pressure and
mixture-ratio. The highest mixture ratio correction settling time corresponds to the nominal engine
linear model about the 130kN equilibrium point which was already simulated and for which performance
and stability were ensured.
It was observed that for two out of the three simulations there were saturations of the valves. Conse-
quently, we implemented an anti-windup to prevent the integral term of the PID controller from growing
indefinitely when the valves are saturated. The PID structure is shown in figure 8.8.
1
Measurement
1
Input reference
1s
Integrator
2
Setpoint
ki
Integral gain
kp
Proportional gain
kd
Derivative gain
Saturation
Nfilter
Cut-off frequency
Derivative
1s
Low-pass filter
k_awu
Anti-windup gain
Figure 8.8: PID with anti-windup block diagram.
This correction decreases the time the system takes to respond to a new setpoint reference that
desaturates the valves. The results of the simulations are presented in figure 8.9 and in figure A.2 of
appendix A. Let us note that the VBPH minimum open angle is limited to a value different than 0.
Only simulation c3 does not saturate either the VBPH or the VBPO valve to attain the 180kN and the
130kN regimes. On the one hand, simulation c2 reaches the desired chamber pressures of both regimes
but is unable to impose a 6.1 mixture ratio during the 180kN setpoint. Simulation c1, on the other hand,
never reaches the desired reference of mixture ratio. Expectedly, some of the functional limits, namely
75
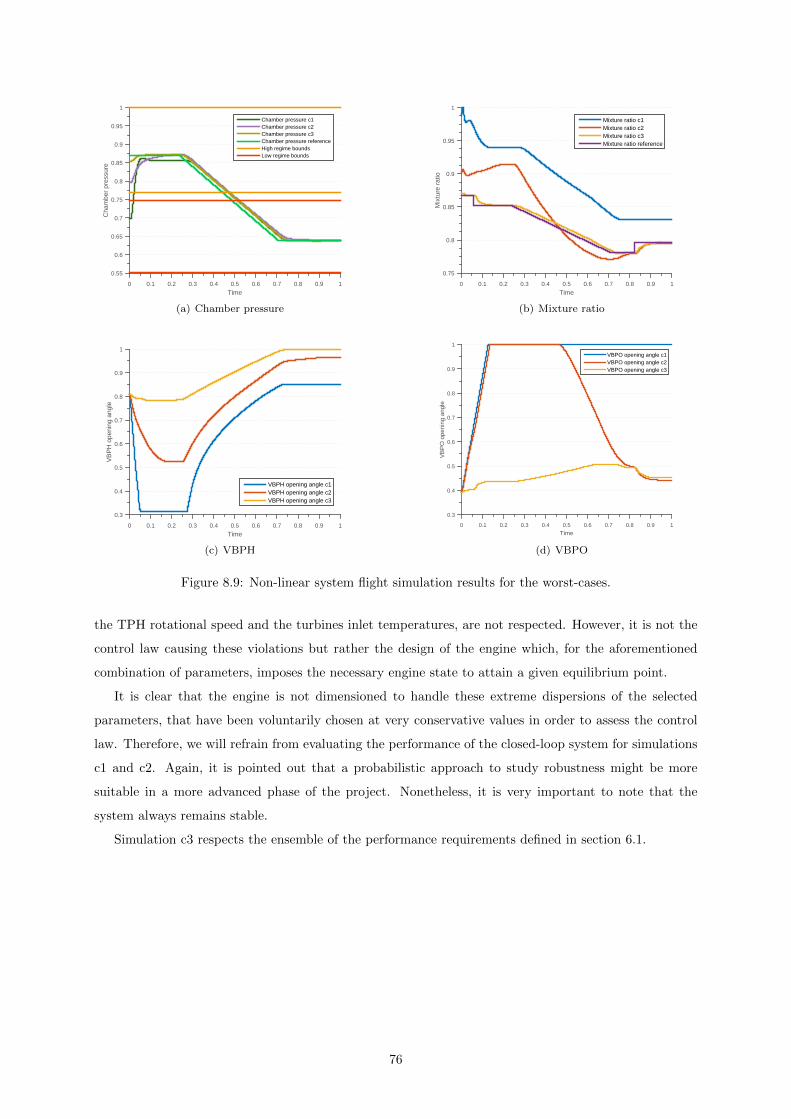
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Chamber pressure c1Chamber pressure c2Chamber pressure c3Chamber pressure referenceHigh regime boundsLow regime bounds
(a) Chamber pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mix
ture
rat
io
0.75
0.8
0.85
0.9
0.95
1
Mixture ratio c1Mixture ratio c2Mixture ratio c3Mixture ratio reference
(b) Mixture ratio
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PH
ope
ning
ang
le
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
VBPH opening angle c1VBPH opening angle c2VBPH opening angle c3
(c) VBPH
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PO
ope
ning
ang
le
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
VBPO opening angle c1VBPO opening angle c2VBPO opening angle c3
(d) VBPO
Figure 8.9: Non-linear system flight simulation results for the worst-cases.
the TPH rotational speed and the turbines inlet temperatures, are not respected. However, it is not the
control law causing these violations but rather the design of the engine which, for the aforementioned
combination of parameters, imposes the necessary engine state to attain a given equilibrium point.
It is clear that the engine is not dimensioned to handle these extreme dispersions of the selected
parameters, that have been voluntarily chosen at very conservative values in order to assess the control
law. Therefore, we will refrain from evaluating the performance of the closed-loop system for simulations
c1 and c2. Again, it is pointed out that a probabilistic approach to study robustness might be more
suitable in a more advanced phase of the project. Nonetheless, it is very important to note that the
system always remains stable.
Simulation c3 respects the ensemble of the performance requirements defined in section 6.1.
76
8.2.3 Failure cases
Even though there is a low probability of occurrence, there is also an interest in assessing to which
extent the controller would be robust enough to carry out the mission successfully in case of failure.
Consequently, considering that there are so far no specifications regarding the robustness of the controller
with respect to these singular events, we seek to determine, one by one, the worst case for which the
system remains stable.
The failure is represented by a step of the concerned parameter. The simulation plan is the same as
the one used in the previous section over the non-linear model. Table 8.2 summarizes the results. The
parameters are presented in the same order as that of the list in section 6.8. The pressure loss of the
hydrogen injector was replaced by an equivalent parameter, the injection section, because the mass flow
rate through the orifice is a linear function of the latter and not of the former. The same was not applied
to the oxygen injector which, being a liquid orifice, presents a linear relationship between the mass flow
rate and its pressure loss coefficient.
Table 8.2: Robustness limits to failure events.
Percentage of the
nominal value (%)
SinjH < -30
kpO 100
ηOP -50
ηOT < -15
ηHP < -15
ηHT -8.0
The second and the third bounds, for the the oxygen injector pressure loss coefficient and the efficiency
of the oxygen pump, are conservative. In fact we did not search further because they largely cover the
expected amplitudes of the failures for these parameters. The same applies to the hydrogen injection
orifice section, the efficiency of the oxygen turbine and the efficiency of the hydrogen pump, with an
important difference: should these parameters differ further from their nominal values, we would observe
a saturation of the valves, either when maintaining the 180kN regime or when transitioning to the 130kN
regime, while still maintaining stability. Lastly, the efficiency of the hydrogen turbine, the parameter for
which the engine is least capable of supporting a failure, is also bounded by the saturations of the valves.
In conclusion, there are internal limitations due to the design of the engine and of the actuators that no
controller could overcome. The control law and the inherent system stability is therefore not the limiting
factor.
In order to illustrate the behaviour of the system during a failure event, we present in figure 8.10 the
results of the flight simulation on the non-linear model such as it was defined in section 8.1 with a step
of kpO , the pressure loss coefficient of the oxygen injector, which doubles its value. The mixture ratio
presents the most violent time response. It remains nonetheless bounded in between the allowable interval
77
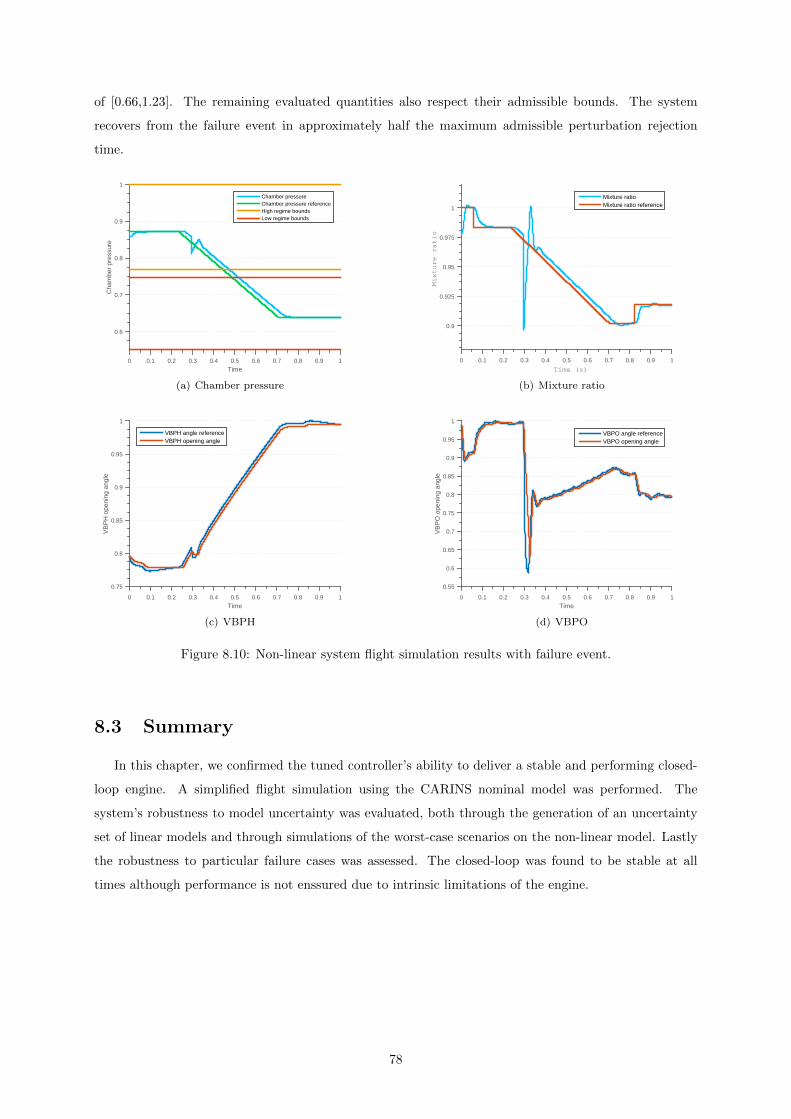
of [0.66,1.23]. The remaining evaluated quantities also respect their admissible bounds. The system
recovers from the failure event in approximately half the maximum admissible perturbation rejection
time.
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Cha
mbe
r pr
essu
re
0.6
0.7
0.8
0.9
1
Chamber pressureChamber pressure referenceHigh regime boundsLow regime bounds
(a) Chamber pressure
Time (s)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Mixture ratio
0.9
0.925
0.95
0.975
1
Mixture ratioMixture ratio reference
(b) Mixture ratio
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PH
ope
ning
ang
le
0.75
0.8
0.85
0.9
0.95
1
VBPH angle referenceVBPH opening angle
(c) VBPH
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VB
PO
ope
ning
ang
le
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
VBPO angle referenceVBPO opening angle
(d) VBPO
Figure 8.10: Non-linear system flight simulation results with failure event.
8.3 Summary
In this chapter, we confirmed the tuned controller’s ability to deliver a stable and performing closed-
loop engine. A simplified flight simulation using the CARINS nominal model was performed. The
system’s robustness to model uncertainty was evaluated, both through the generation of an uncertainty
set of linear models and through simulations of the worst-case scenarios on the non-linear model. Lastly
the robustness to particular failure cases was assessed. The closed-loop was found to be stable at all
times although performance is not enssured due to intrinsic limitations of the engine.
78

Chapter 9
Conclusion and Future Work
9.1 Conclusion
The main focus of this thesis was to define, analyse and solve a control problem, one in which the
controlled quantities are the thrust and mixture ratio of a liquid bi-propellant rocket engine. Motivated
mainly by the necessity of improving the performances of current European launchers, a methodology
to, firstly, model and analyse the dynamics of a rocket engine, and secondly, to design and validate an
appropriate control law, was established. Our numerical application was the VINCI rocket engine which
is meant to equip the second stage of Ariane 6.
Firstly an analytic linear model in the state-space form was sought out. A comparison between
this model, issued from the linearization of the governing equations of the engine, and the non-linear
model, previously developed in-house, was drawn. The results not being satisfactory, the least-squares
identification method was used in order to obtain a physical, both complete and reduced, linear model of
the engine. Notably, both the complete and the reduced state vectors were deduced based on the analytic
analysis. After validating the identified models, a sensitivity analysis over a limited number of design
parameters was effectuated. It was concluded that the regenerative circuit is mostly responsible for the
slowest mode, although it is not observable/controllable, and that the turbo-pumps are closely related to
the dominant modes which determine the settling times of the step-response.
Secondly a double-PID controller was designed using SISO design techniques. The effects of both the
valves and the sensors were evaluated and mitigated by readjusting the controller and implementing a
feed-forward. After validating the solution on the reduced and complete linear models, the closed-loop
was characterized, namely by calculating the modulus margin, the closed-loop poles and the frequency
response. On the non-linear CARINS model, we validated the controller by ensuring stability and perfor-
mance in presence of non-linearities, of a changing operating point and of an overall more realistic model.
The ensemble of the control specifications were verified on the nominal model.
Lastly, the robustness of the controller was tested against parametric uncertainties. A large number
of perturbed linear models was generated and the performances during a flight simulation were presented
in a statistical fashion. A similar flight simulation was run on the nominal non-linear model, for which
79

stability, performance and the functional bounds of the engine components were verified against what
was defined as the target values at the beginning of the project. The system’s tolerance to singular failure
events was also determined.
The main achievement of this thesis, and its first listed objective, was obtaining a low order physical
linear model of the engine, specifically one that can be used to design control laws. As a consequence, the
components and the uncertainties which play a major role in the dynamics of the engine were identified.
Moreover, it was demonstrated that a modified PID controller is sufficient to control the engine. While
a more rigorous robustness analysis is needed as soon as more information about the engine is made
available, it was still observed that the engine controller is robust to very conservative uncertainties and
that the engine will sooner saturate due to its own design than the control law will render the system
unstable.
9.2 Future Work
There are several aspects of the developed work that warrant further investigation. Firstly, the
analytic approach to obtain a linear-model, which for several reasons failed to provide a fitting time-
response, should be employed in a different engine in order to better comprehend the reasons for its
misrepresentation. Moreover, the engine sensitivity analysis, which was effectuated solely for four different
parameters, could be extended to other parameters of interest.
As soon as more detailed information about the valves’ dynamic model, the sensors, the parametric
uncertainties and the functional limits of the components is made available, a more rigorous robustness
analysis ought to be held. Specifically, we could opt to run a Monte Carlo simulation over the non-linear
model or to use the µ analysis framework if we are successful in obtaining a fitting analytic model. In
function of the results, new approaches to design the controller may be put in place, for instance the
structured H-infinity coupled with a PID control structure. In order to fully validate the control law it is
also mandatory to design a mixture-ratio estimator and evaluate its impact on the overall performance
and stability of the closed-loop system.
Lastly, the application of the same methodology to other engines should be considered. While the
VINCI engine was found to be a rather simple control problem, with relaxed constraints, it may not
be the case when studying other thermodynamic cycles, namely the gas-generator cycle of the Vulcain
rocket engine.
80
Bibliography
[1] D. A. Shearer and G. L. Vogt. Rockets - an educator’s guide with ac-
tivities in science, mathematics, and technology, 2003. Retrieved from:
http://quest.arc.nasa.gov/space/teachers/rockets/58269main Rockets.Guide.pdf.
[2] G. P. Sutton and O. Biblarz. Rocket Propulsion Elements, chapter 2-4. John Wiley and Sons, 2001.
[3] J. H. Wyld. Fundamental equations of rocket motion: Part i - flight in airless space. Astronautics,
Vol. 6(No. 35):pp. 13–16, 1936.
[4] E. Y. Choueiri. A critical history of electric propulsion: The first 50 years (1906-1956). Journal of
Propulsion and Power 20.2, pages pp. 193–203, 2004.
[5] B. Ward. Space: The Life of Wernher von Braun. Naval Institute Press, 2013.
[6] M. J. Casiano, J. R. Hulka, and V. Yang. Liquid-propellant rocket engine throttling: A comprehen-
sive review. Journal of Propulsion and Power, 2010.
[7] E. M. Betts and R. A. Frederick. A historical systems study of liquid rocket engine throttling ca-
pabilities. 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Joint Propulsion
Conferences, 2010.
[8] S.L Harris. Block ii: The new space shuttle main engine. 32nd Joint Propulsion Conference and
Exhibit, Joint Propulsion Conferences, 1996.
[9] SpaceX. Falcon 9 Launch Vehicle - PAYLOAD USER’S GUIDE, rev 2 edition, October 2015.
[10] A. Santana, F.I. Barbosa, M. Niwa, and L.C.S. Goes. Modeling and robust analysis of a liquid rocket
engine. American Institute of Aeronautics and Astronautics, 2000.
[11] A. Allahverdizadeh and B. Dadashzadeh. A fuzzy logic controller for thrust level control of liquid
propellant engines. Scientific Cooperations International Workshops on Electrical and Computer
Engineering Subfields, 2014.
[12] A. Duyar and T. Guo. Space shuttle main engine model identification. IEEE Control Systems
Magazine, 1990.
[13] A. Duyar, V. Eldem, W. C. Merril, and T. Guo. Space shuttle main engine model identification.
Journal of Dynamic Systems, Measurement, and Control, 1989.
81
[14] A. Nassirharand and H. Karimi. Controller synthesis methodology for multivariable nonlinear sys-
tems with application to aerospace. Journal of Dynamic Systems, Measurement, and Control, 2004.
[15] H. Sunakawa, A. Kurosu, K. Okita, W. Sakai, S. Maeda, and A. Ogawara. Automatic thrust and
mixture ratio control of the LE-X. 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and
Exhibit, 2008.
[16] A. Nassirharand and H. Karimi. Mixture ratio control of liquid propellant engines. Aircraf Engi-
neering and Aerospace Technology: An International Journal, 2005.
[17] A. Ray, M.S. Holmes, and C.F. Lorenzo. Nonlinear control of a reusable rocket engine for life
extension. American Control Conference, 1998.
[18] A. Ray M.S. Holmes and C.F. Lorenzo. Life extending controller design for reusable rocket engines.
The Aeronautical Journal, 2001.
[19] D. K. Huzel and D. H. Huang. Modern Engineering for Design of Liquid-Propellant Rocket Engines,
chapter 1,2,5,6. American Institute of Aeronautics and Astronautics, 1992.
[20] C. L. Lawson and R. J. Hanson. Solving Least squares problems. Society for Industrial and Applied
Mathematics, 1987.
[21] S. Skogestad and I. Postlethwaite. Multivariable Feedback Control: Analysis and Design, chapter
2-4,7,Appendix A. John Wiley and Sons, 2005.
[22] S. J. Miller. The method of least squares. Mathematics Department Brown University, pages 1–7,
2006.
[23] K. Willcox and J. Peraire. Balanced model reduction via the proper orthogonal decomposition.
AIAA journal 40.11: 2323-2330, 2002.
[24] Snecma. Propulsion spatiale - vinci, 2011. Retrieved from: http://www.safran-aircraft-
engines.com/fr/file/download/fiche vinci 2011 hd.pdf.
82
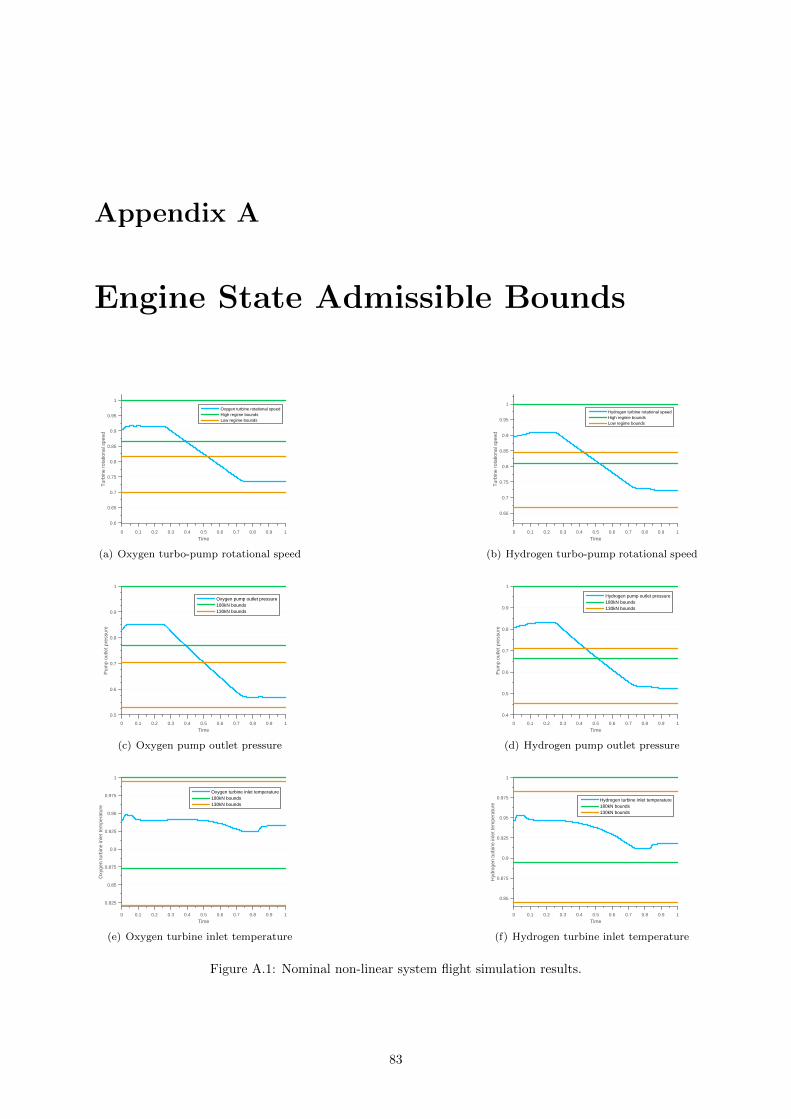
Appendix A
Engine State Admissible Bounds
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Tur
bine
rot
atio
nal s
peed
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Oxygen turbine rotational speedHigh regime boundsLow regime bounds
(a) Oxygen turbo-pump rotational speed
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Tur
bine
rot
atio
nal s
peed
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Hydrogen turbine rotational speedHigh regime boundsLow regime bounds
(b) Hydrogen turbo-pump rotational speed
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Pum
p ou
tlet p
ress
ure
0.5
0.6
0.7
0.8
0.9
1
Oxygen pump outlet pressure180kN bounds130kN bounds
(c) Oxygen pump outlet pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Pum
p ou
tlet p
ress
ure
0.4
0.5
0.6
0.7
0.8
0.9
1
Hydrogen pump outlet pressure180kN bounds130kN bounds
(d) Hydrogen pump outlet pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Oxy
gen
turb
ine
inle
t tem
pera
ture
0.825
0.85
0.875
0.9
0.925
0.95
0.975
1
Oxygen turbine inlet temperature180kN bounds130kN bounds
(e) Oxygen turbine inlet temperature
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Hyd
roge
n tu
rbin
e in
let t
empe
ratu
re
0.85
0.875
0.9
0.925
0.95
0.975
1
Hydrogen turbine inlet temperature180kN bounds130kN bounds
(f) Hydrogen turbine inlet temperature
Figure A.1: Nominal non-linear system flight simulation results.
83
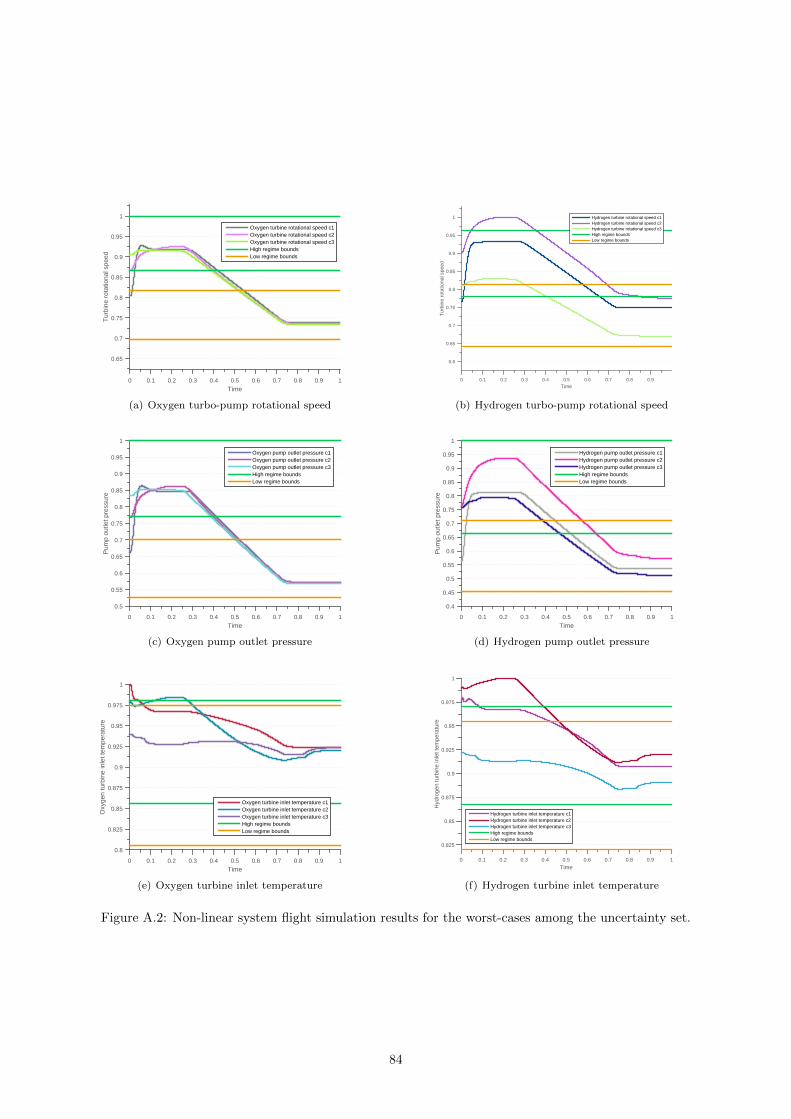
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Tur
bine
rot
atio
nal s
peed
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Oxygen turbine rotational speed c1Oxygen turbine rotational speed c2Oxygen turbine rotational speed c3High regime boundsLow regime bounds
(a) Oxygen turbo-pump rotational speed
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Tur
bine
rot
atio
nal s
peed
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1 Hydrogen turbine rotational speed c1Hydrogen turbine rotational speed c2Hydrogen turbine rotational speed c3High regime boundsLow regime bounds
(b) Hydrogen turbo-pump rotational speed
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Pum
p ou
tlet p
ress
ure
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Oxygen pump outlet pressure c1Oxygen pump outlet pressure c2Oxygen pump outlet pressure c3High regime boundsLow regime bounds
(c) Oxygen pump outlet pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Pum
p ou
tlet p
ress
ure
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Hydrogen pump outlet pressure c1Hydrogen pump outlet pressure c2Hydrogen pump outlet pressure c3High regime boundsLow regime bounds
(d) Hydrogen pump outlet pressure
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Oxy
gen
turb
ine
inle
t tem
pera
ture
0.8
0.825
0.85
0.875
0.9
0.925
0.95
0.975
1
Oxygen turbine inlet temperature c1Oxygen turbine inlet temperature c2Oxygen turbine inlet temperature c3High regime boundsLow regime bounds
(e) Oxygen turbine inlet temperature
Time0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Hyd
roge
n tu
rbin
e in
let t
empe
ratu
re
0.825
0.85
0.875
0.9
0.925
0.95
0.975
1
Hydrogen turbine inlet temperature c1Hydrogen turbine inlet temperature c2Hydrogen turbine inlet temperature c3High regime boundsLow regime bounds
(f) Hydrogen turbine inlet temperature
Figure A.2: Non-linear system flight simulation results for the worst-cases among the uncertainty set.
84





























