MISSING DATA ESTIMATION FOR FULLY 3D SPIRAL CT IMAGE
RECONSTRUCTIONDaniel B. Keesinga, Joseph A. O’Sullivanb, David G.
Polittec, Bruce R. Whitingc, and Donald L. Snyderb
aDept. of Biomedical Engineering, bDept. of Electrical and
Systems Engineering,cMallinckrodt Institute of Radiology,
Washington University, St. Louis, MO, USA
AbstractReconstruction algorithms that are not set up to handle
in-
complete datasets can lead to artifacts in the reconstructed
images because the assumptions regarding the size of the
image space and/or data space are violated. In this study,
two recently developed geometry-independent methods1
are applied to fully 3D multi-slice spiral CT image recon-
struction. Using simulated and clinical datasets, we dem-
onstrate the effectiveness of the missing data approaches
in improving the quality of slices that have experienced
truncation in either the transverse or longitudinal
direction.
• When the support of an object lies partially outside the field
of view (FOV) of a CT scanner, artifacts may arise in the
reconstructed image due to undersampling.
• Most reconstruction algorithms implicitly assume the entire
object is confined to the FOV, but if this is not the case,
excessively large attenuation values may be recon-structed inside
the boundary of the FOV.
• The reconstruction algorithm is unaware that the mea-sured
data has been affected by the object's attenuation outside the FOV,
so the image in the FOV is recon-structed such that the projections
through it match the measured data.
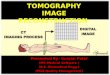
Forward projection
Image update
Back-projection)(ˆ
)( xc k )(ˆ )1( xc k+
)(yd Back-projection
)(ˆ )( xb k
)(xb
Patient
Image
)(xc CT scan
We assume the photons arrive at the detector elements
accord-
ing to a Poisson counting process, d(y), with mean value
where x = image voxel index, y = source-detector pair
index,Io(y) = incident photon intensity, h(y|x) = projector kernel
(mm),and c(x) = 3D truth image (mm-1).
Existing Analytical Methods
where:
AM algorithm (O’Sullivan and Benac9) for monoenergetic model
Problem Statement Statistical Data Model
Data and Image Spaces
Alternating Minimization
Transverse Truncation
Missing Data Extension
Longitudinal Truncation
Conclusions & Future Work
Acknowledgments
References
q(y:c(k))
This work was supported in part by a National Science Foundation
Graduate Research Fellowship, by the National Cancer Institute
under research grant R01CA75371 (J. F. Williamson, P. I.), and by
the National Center for Super-computing Applications under grant
ASC060030, which utilized the SGI Altix. We appreciate insightful
comments by J. F. Williamson of Virginia Commonwealth
University.
1. D. L. Snyder, J. A. O’Sullivan, R. J. Murphy, D. G. Politte,
B. R. Whiting, and J. F. Williamson, “Image reconstruc-tion for
transmission tomography when projection data are incomplete,” Phys.
Med. Biol. 51, pp. 5603–5619, 2006.
2. S. Schaller, F. Noo, F. Sauer, K. C. Tam, G. Lauritsch, and
T. Flohr, “Exact radon rebinning algorithm for the long object
problem in helical cone-beam CT,” IEEE Trans. Med. Imag. 19, pp.
361–375, 2000.
3. M. Defrise, F. Noo, and H. Kudo, “A solution to the
long-object problem in helical cone-beam tomography,” Phys. Med.
Biol. 45, pp. 623–643, 2000.
4. Y. Zou and X. Pan, “Exact image reconstruction on PI-lines
from minimum data in helical cone-beam CT,” Phys. Med. Biol. 49,
pp. 941–959, 2004.
5. J. Hsieh, E. Chao, J. Thibault, B. Grekowicz, A. Horst, S.
McOlash, and T. J. Myers, “A novel reconstruction algo-rithm to
extend the CT scan field-of-view,” Med. Phys. 31, pp. 2385–2391,
2004.
6. K. Sourbelle, M. Kachelriess, and W. A. Kalender,
“Reconstruction from truncated projections in CT using adaptive
detruncation,” Eur. Radiol. 15, pp. 1008–1014, 2005.
7. G. L. Zeng, G. T. Gullberg, P. E. Christian, and D. Gagnon,
“Cone-beam iterative reconstruction of a segment of a long object,”
IEEE Trans. Nucl. Sci. 49, pp. 37–41, 2002.
8. P. J. La Rivière, “Monotonic iterative reconstruction
algorithms for targeted reconstruction in emission and
trans-mission computed tomography,” in IEEE Nuclear Science
Symposium/Medical Imaging Conference, 2006.
9. J. A. O’Sullivan and J. Benac, “Alternating minimization
algorithms for transmission tomography,” IEEE Trans. Med. Imag., to
appear.
10. W.P. Segars, Development of a new dynamic NURBS-based
cardiac-torso (NCAT) phantom. PhD thesis, The Uni-versity of North
Carolina, May 2001.
Experiment 1 (NCAT phantom10): Truncate the data from 30
detector elements on each side of sinogram (in all detector rows).
Perform unregularized AM image recon-struction of 128x128x84 volume
using specified methods.
Experiment 4 (NCAT phantom): Perform unregularized AM
reconstruction of 128x128x84 volume using specified methods. End
slice initialization was done by replacing end slices after first
iteration with the nearest fully-sampled slice. From left to right,
the percentage of complete data for slices 76-81 was: 81.7%, 64.5%,
49.6%, 34.1%, 16.9%, and 4.5%.
Experiment 2 (NCAT phantom): Same experiment as above, except
perform regularized AM image reconstruc-tion of 128x128x84 volume
using specified methods on noiseless and noisy data. A log cosh
potential function was used to penalize differences between
neighbors.
Experiment 3 (clinical abdominal scan): Truncate the data from
125 detector elements on each side of sino-gram (in all detector
rows). Perform unregularized AM image reconstruction of 512x512x176
volume.
Corresponding author email: [email protected]
Existing Statistical Methods
Long object methods: Among existing methods, Schaller
et al.2 developed an exact rebinning method called the PHI-
method, while Defrise et al.,3 and Zou and Pan,4 have made
use of differentiated backprojection along PI-line segments.
Transverse truncation methods: Among the extended
FOV reconstruction methods, Hsieh et al.5 and Sourbelle et
al.6 extrapolate the missing data in each projection using
2D
parallel beam consistency conditions (e.g., constant area
under projection curve in each view) and other constraints.
100 101 102104
105
106
107
Iteration
I−divergence No missing data approach
Method 1Method 2Complete data available
(a) Truth image (slices 70 and 74 shown)
(e) I-divergence vs. iteration
(a) Truth image
(b) Method 1 without end slice initialization
(c) Method 1 with end slice initialization
(d) Method 2 with end slice initialization
(b) Reconstruction without a missing data approach
(c) Method 1 reconstruc-tion using noiseless data
(a) Method 1 reconstruc-tion using noiseless data
(b) Method 2 reconstruc-tion using noiseless data
(c) Method 1 reconstruc-tion using noisy data
(a) Method 2 reconstruc-tion after 39 iterations
with 145 ordered subsets
(b) Complete data recon-struction after 39 iterations with 145
ordered subsets
(d) Method 2 reconstruc-tion using noisy data
(d) Method 2 reconstruc-tion using noiseless data
All NCAT reconstruc-tions shown after 100 full iterations with
73
ordered subsets.
ˆ
q(y : ĉ(k)) = Io(y) exp
−
x∈Xh(y|x)ĉ(k)(x)
b̂(k)(x) =
y∈Y
h(y|x)q(y : ĉ(k))
b(x) =
y∈Yh(y|x)d(y)
ĉ(k+1)(x) = max
ĉ(k)(x)− 1
Z(x)ln
b(x)
b̂(k)(x)
, 0
Z(x) = normalizing factor
Long object methods: Zeng et al.7 published an iterative
method that is similar in principle to the first approach of
Snyder et al.1 (with one major exception being the choice
of reconstruction algorithm). Rays that pass through both
the ROI slices and outer slices are not used.
Transverse truncation methods: La Rivière described a
joint estimation procedure that iteratively updates pixels
and projections within the FOV.8 An initial estimate of the
projections outside the FOV is obtained from a FBP recon-
struction inside the FOV, and then subtracting its reprojec-
tion from the measured projections.
• A feasibility study was conducted to apply two recently
de-veloped geometry-independent methods to fully 3D multi-slice
spiral CT image reconstruction.
• The reconstructions using transversely truncated datasets
demonstrate that it is possible to reconstruct the image inside the
FOV quite accurately without many iterations.
• Outside the transverse FOV, some potentially minor arti-facts
are present. These artifacts diminish with increased numbers of
iterations, leading to long runtimes.
• Methods 1 and 2 addressed the long object problem com-parably
well when the end slices were initialized.
• It is possible that using some form of non-smoothing
regu-larization, such as a prior based on consistency condi-tions,
may significantly improve the convergence rate.
The image space must be large enough to fully support the
backprojections shown above, and all voxels in the image
space must be updated to guarantee monotonic convergence.
From Snyder et al.,1 the backprojections used in the image
update step are different from the above algorithm as
follows:
b(x) =
y∈Yinc
h(y|x)d(y) +
y∈Ymiss
h(y|x)q(y : ĉ(k))
y∈Yinc
h(y|x)q(y : ĉ(k)) +
y∈Ymiss
h(y|x)q(y : ĉ(k))b̂(k)(x) =
Method 1: ignore missing data, i.e.,Method 2: estimate missing
data, i.e.,
Ymiss = ∅Ymiss = ∅
q(y : c) = E[d(y)] = Io(y) exp
−
x∈Xh(y|x)c(x)
,
(a) Transverse view: the complete image space X circumscribes
the transverse support of the patient.
(b) Longitudinal view: the complete image space X is denoted by
the gray slices.
detectors (in one row)
patient
extended FOV
x-ray source
scanner FOV
detectors (in one row)
patientextended FOV
x-ray source
scanner FOV
Yinc Ym
issY m
iss
patient ROI
detectorrows
x-ray source
bed