Embed Size (px)
DESCRIPTION
Fotogrammetrian perusteita I. Photogrammetry when broken into it's roots is "using light to measure and draw“. Kohteesta otetaan kuva tai kuvia, joiden avulla kohde kartoitetaan, ts. siitä tuotetaan 2-, 2.5- tai aito 3D-malli (muoto/koko/sijainti/laadulliset ominaisuudet). - PowerPoint PPT Presentation
Citation preview

MINV12 Pe 3.3. 08:15-10:00
Fotogrammetrian perusteita I
Photogrammetry when broken into it's roots is "using light to measure and draw“.
Kohteesta otetaan kuva tai kuvia, joiden avulla kohde kartoitetaan, ts. siitä tuotetaan 2-, 2.5- tai aito 3D-malli (muoto/koko/sijainti/laadulliset ominaisuudet).
Lähifotogrammetria (Close Range Photogrammetry) Ilmavalokuvaus (Aerial Photogrammetry) ja Satelliittifotogrammetria.
“Stereofotogrammetria”. (stereo- vs. multiscopic)Passiivinen vs. aktiivinen kuvaus; lidar fotogrammetriaa?

MINV12 Pe 3.3. 08:15-10:00
Kohde paikallaan – kamera liikkuu tai on useita kameroita
Kohde liikkuu – kamera(t) paikallaan
Kuvamittaamisen edellytys: Tunnetaan kuvasäteen kulku sensorin pinnalta kohteeseen ja takaisin. Matkalla suoraviivaista kulkua vääristävät väliaine ja linssisysteemi suotimineen.
Yksinkertaisin malli: “Neulanreikäkameramalli” kuvasäde kulkee kohteesta linssille suoraan ja jatkaa matkaan projektiokeskuksen kautta edelleen samansuuntaisena kunnes leikkaa filmin, joka on äärettömän ohut taso.
Perusteita

MINV12 Pe 3.3. 08:15-10:00
Perusteita - sensorimalli ADS40
frame sensor vs. linear scanner
Leica ADS40- yksi optiikka- 3 (712000) pikselin riviä/viivaa kolme samanaikaista katselusuuntaa.
- keskusprojektio CCD-rivin suunnassa ja yhdensuuntaisprojektio lentolinjan suunnassa
Jokaisen CCD-rivin orientaatio on erilainen ja ajan (t) funktio kompleksi, mutta hallittavissa oleva malli (vrt. satelliittikuvien sensorimallit)

MINV12 Pe 3.3. 08:15-10:00
Avaruussuora: p(t) = (X,Y,Z) + t (i,j,k)
tai
hZgYfXe
dZcYbXa
Jos X, Y tai Z tunnetaan; kaksi muuta voidaan ratkaista, jos lisäksi kertoimet (a…h) tunnetaan. Yhteensä on 6 tuntematonta per kamera.
Avaruussuora (kuvasäde) kulkee kameran polttopisteen kautta, ja sitä leikkaa kuvataso (filmi, CCD-kenno), jonka pinnan normaali (kameran optinen akseli) leikkaa polttopisteen etäisyydellä, jota kutsutaan polttoväliksi tai kameravakioksi.
Perusteita – neulanreikäkameramalli

MINV12 Pe 3.3. 08:15-10:00
Kamera on kiertynyt kolmiulotteisesti avaruudessa. Kameran xyz-akseliston ja 3D koordinaatiston XYZ-akseliston välille pitää rakentaa kuvaus, jolla kuvasäde viedään polttopisteestä kameran sisään filmille ja/tai -1.
Matemaattisesti kuvaus on ortogonaali 3x3 kiertomatriiri R, R-1 = RT
Sen elementit rij vastaavat koordinaattiakselien suuntakosineja [-1,1]rxX,rxY,rxZ,…rzZ.
Filmillä/kuvatasolla jokaisella pisteellä on xyz-kamerakoordinaatit (x,y,c) eli kuvasäde pitää ‘pysäyttää’ tasoon, joka on etäisyyden c = polttoväli päässä polttopisteestä, joka sijaitsee kuvatason normaalilla.
Perusteita – ulkoinen orientointi

Yksikuvamittaus: (x,y)-havainto kuvalta, Z kiinnitetään => t ratkeaa => X,Y ratkeaa.
Kuva (x,y,c) → Kohde(X,Y,Z)

MINV12 Pe 3.3. 08:15-10:00
Yksikuvamittaus: (x,y,c)-havainto kuvalta,Z-kiinnitetään => t ratkeaa => X,Y ratkeaa.
Esim. Kuva FM02204_1230
Suuntakosinitr11:=-0.26788;r12:=-0.96343;r13:=0.00667;r21:= 0.96344;r22:=-0.26783;r23:=0.00721;r31:=-0.00516;r32:= 0.00836;r33:=0.99995;Polttopisteen sijainti (KKJ):X0:=2515731.81;Y0:=6860644.14;Z0:=1132.57;Kuvahavainnot (c=kameravakio):x:=-0.100370;y:=0.086453;c=0.153277;Oletetaan kohteelle Z = 165 m.165-Z0-t*(r31*x+r32*y+r33*(-c))=0Ratkaisu: t = 6364.391249, sijoitetaan tX-X0-t*(r11*x+r12*y+r13*(-c))=0Y-Y0-t*(r21*x+r22*y+r23*(-c))=0Ratkaisu: X = 2515366.32,Y = 6859874.30, Z =165.0vrt. 2515366.58, 6859874.90, 165.8
Kuva (x,y,c) → Kohde(X,Y,Z), Esimerkki (DEMO 1)

MINV12 Pe 3.3. 08:15-10:00
Kohde(X,Y,Z) → Kuva (x,y,c) , Esimerkki
Kuva FM02204_1230; X0,Y0,Z0 ja suuntakosinit samat kuin edellä
Suuntakosinit:
> r11:=-0.26788;r12:=-0.96343;r13:=0.00667; r21:= 0.96344;r22:=-0.26783;r23:=0.00721; r31:=-0.00516;r32:= 0.00836;r33:=0.99995;
Projektiokeskuksen sijainti (polttopiste)
> X0:=2515731.81;Y0:=6860644.14;Z0:=1132.57;
3D-pisteen sijainti ja kameravakio:
X:=2515300;Y:=6859900; Z:=165; c:=0.153277;
Ratkaisu (kollineaarisuushtälöt):
> x = -c*(r11*(X-X0)+r21*(Y-Y0)+r31*(Z-Z0))/ (r13*(X-X0)+r23*(Y-Y0)+r33*(Z-Z0));-0.093663 m> y = -c*(r12*(X-X0)+r22*(Y-Y0)+r32*(Z-Z0))/ (r13*(X-X0)+r23*(Y-Y0)+r33*(Z-Z0)); 0.095386 m
Ortoilmakuvan valmistus:
1. Annetaan XY-alue, johonortokuva halutaan tulostaa pinnan Qsuhteen
2. Tehdään pistehila (XY),joka määrää pikselikoon
3. On olemassa korkeusmalli pinnalle Q, ZQ = f(X,Y).
4. Kuva tehdään XY-piste kerral-laan, haetaan pisteelle Z mallilta, (X,Y,Z), haetaan ko. pisteen paikka ilmakuvalta → (x,y,c) otetaan sieltä pikseli, joka siirretään (interpoloidaan) ortokuvalle.
DEMO 2

Mistä orientointitunnukset?
Edellä olevissa yhtälöissä tarvittiin:
1. Kameravakio, c eli kuvakoordinaatin z-arvo
2. Kuvakoordinaatit “filmitasolla” eli x ja y.
3. Polttopisteen sijainti (X0,Y0,Z0)
4. Suuntakosinit eli 3x3 R-matriisi (3 avaruuskierron funktiona, esim.)
x:=-0.100370y:=0.086453c=0.153277

MINV12 Pe 3.3. 08:15-10:00
Orientointitunnukset?
Yleiskatsaus
Filmikamera skannaus + reunamerkkien mittaus reunamerkkimuunnoksen laskenta (x,y) = f(row,col). Kameravakio c kalibrointitiedoista.
Jos digikamera pääpisteen osoittaminen (row, col), pikselikoordinaatiston skaala rivi- ja sarakesuunnissa + mahd. affiinisuus sekä kameravakio c kalibrointitiedoista.
Jos linssivirheitä, ne on kompensoitava.
Projektiokeskuksen sij. (X0,Y0,Z0) ja kameran kallistukset (, , ) joko
A) Suora mittaus (GPS/INS)B) Ilmakolmiointi tukipisteinC) A:n ja B:n yhdistelmä
ILMAKOLMIOINTI-Sädekimpputasoitus
MINV12 Pe 3.3. 08:15-10:00
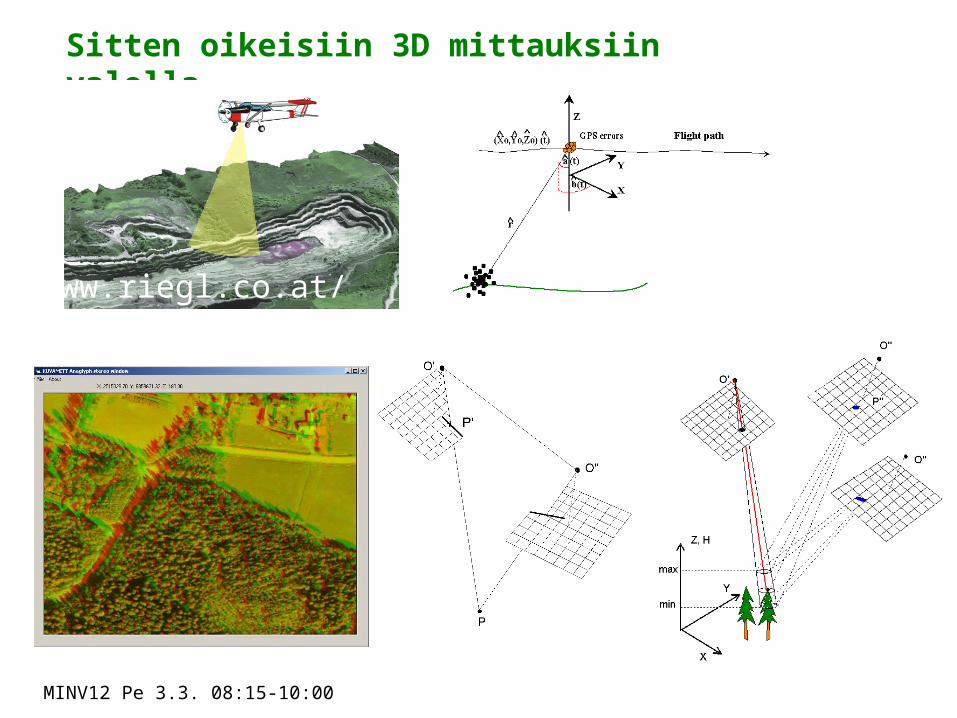
Sitten oikeisiin 3D mittauksiin valolla..
www.riegl.co.at/

MINV12 Pe 3.3. 08:15-10:00
... oletetaan orientointi ratkaistuksi; Kaksi kuvaa → 3D kohde
Kamera1
Kamera2
Tuntemattomia: Pisteen P (X,Y,Z) eli kohdepiste eli kuvasäteiden leikkauspiste. Ts. kuvasäteiden pituudet kameroille 1 ja 2: t1 ja t2.
Tunnettuja: Projektiokeskusten sijainnit X0,Y0, Z0, kallistukset rij sekä kuvahavainnot (x,y,c) molemmilta kuvilta.
Koska orientoinnit saati havainnot eivät ole täydellisiä eivät kuvasäteet leikkaa tarkasti (6 yhtälöä 5 tuntematonta) - voidaan unohtaa yksi yhtälö (kerrallaan) ja ratkaista tuntemattomat viidestä yhtälöstätai käyttää ylimääritystä ja optimointia/ tasoituslaskua.
kuva - kohde kuvasäteet:
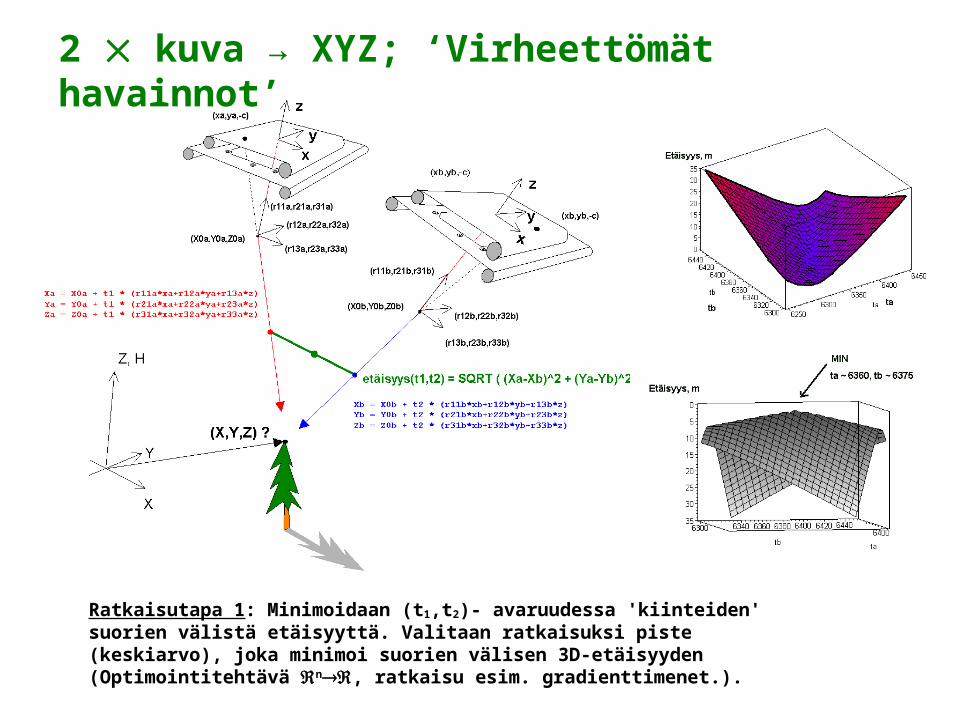
Ratkaisutapa 1: Minimoidaan (t1,t2)- avaruudessa 'kiinteiden' suorien välistä etäisyyttä. Valitaan ratkaisuksi piste (keskiarvo), joka minimoi suorien välisen 3D-etäisyyden (Optimointitehtävä n, ratkaisu esim. gradienttimenet.).
2 kuva → XYZ; ‘Virheettömät havainnot’
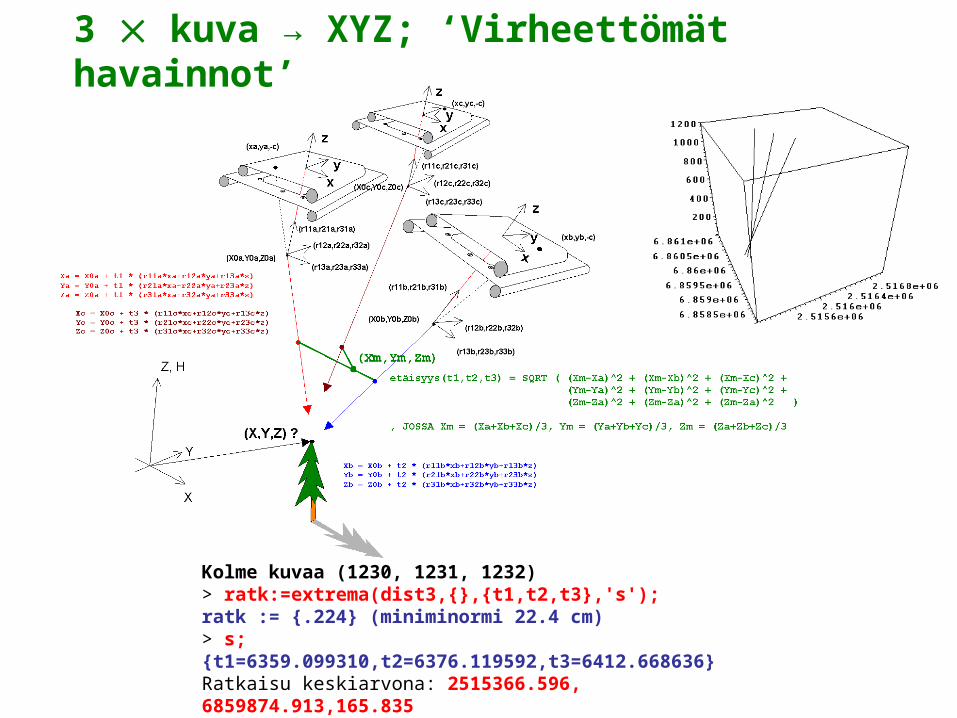
Kolme kuvaa (1230, 1231, 1232)> ratk:=extrema(dist3,{},{t1,t2,t3},'s');ratk := {.224} (miniminormi 22.4 cm)> s;{t1=6359.099310,t2=6376.119592,t3=6412.668636}Ratkaisu keskiarvona: 2515366.596, 6859874.913,165.835
3 kuva → XYZ; ‘Virheettömät havainnot’

MINV12 Pe 3.3. 08:15-10:00
Ratkaisutapa:
PNS-virheyhtälötasoitus.
'ei-kiinteät kuvasäteet'
Arvataan pisteen (X,Y,Z) paikka. Korjataan sitä iteroiden korjauksilla [X,Y,Z]. Ne ratkaistaan tuntemattomien suhteen (X,Y,Z) linearisoiduista kollineaarisuus-yhtälöistä (muodostetaan PNS-normaaliyhtälöt). minimoiden kuvatason havaintovirheiden neliösummaa.
3 kuva → XYZ; ‘Virheelliset havainnot

MINV12 Pe 3.3. 08:15-10:00
iii
iiii
Zy
Yy
Xy
Zx
Yx
Xx
A
dZZy
dYYy
dXXy
ZYXZYXcyfvy
dZZxdY
YxdX
XxZYXZYXcxfvx
yyobs
xxobs
000000
0000)(
000000
0000)(
),,,,,,,,,,(
),,,,,,,,,,(
),,,,,,,,,,(
),,,,,,,,,,(000
0000)(
0000000)(
ZYXZYXcyf
ZYXZYXcxf
iy
ix
i(obs)
i(obs)i
y
xy
δZ
δY
δX
x
3 kuva → XYZ; ‘Virheelliset havainnot
Jokainen kuvahavainto (x,y) tuottaa yhtälöparin, joka linearisoidaan tuntemattomien kohdekoordinaattien suhteen.
Osittaisderivaattojen arvot (lähtölikiarvoilla X0, Y0, Z0) sijoitetaan A-rakennematriisiin, jossa N2 riviä, 3 saraketta. (N=kuvien lkm)
Lähtölikiarvoilla saatujen koordinaattien ja havaittujen koordinaattien erotuksista kootaan virhevektori (y)
x = (ATA)-1 ATy PNS (OLS) –ratkaisuna saadaan parannukset, x

MINV12 Pe 3.3. 08:15-10:00
Esim. Kuvat 1230, 1231, 1232
Kolme kuvaa Kuusi havaintoyhtälöä A(6x3), y(6x1)
Alkuarvaus: 2 515 000, 6 860 000, 200
Linearisointi (A ja y)Korjaus: x=(ATA)-1 ATy, [353.940, -121.008, -33.526]Korjattu: 2515353.94, 6859878.99, 166.47
Linearisointi (uusi A ja y)Korjaus: x=(ATA)-1 ATy, [12.629, -4.089, -0.680]Korjattu: 2515366.57, 6859874.90, 165.79
Linearisointi (uusi A ja y)Korjaus: x=(ATA)-1 ATy, [0.008, -0.002, 0.000]Korjattu: 2515366.58, 6859874.90, 165.79vrt. (t1,t2,t3): 2515366.60, 6859874.91, 165.84
3 kuva → XYZ; ‘Virheelliset havainnot
DEMO 3 eteenpainleikkaus.xls

MINV12 Pe 3.3. 08:15-10:00
N kuva → XYZ (Tarkkuus)
320
N
vvTPainoyksikön (havaintojen) keskineliövirhe, “sigma-null”, [m]
kkxk
kk
q
diagq
0
1
ˆ
))((
AAT Normaaliyhtälöiden käänteismatriisin diagonaalialkioiden ja keskineliövirheen avulla keskivirheet tuntemattomille X, Y ja Z –koordinaateille (vrt. GPS:n #DOP-arvot)
“Naivi mittari”, koska kun 0 → 0 → xk → 0
Kuvien orientointiparametrein epävarmuus jää kokonaan huomiotta (virheiden kasautuminen)
MINV12 Pe 3.3. 08:15-10:00
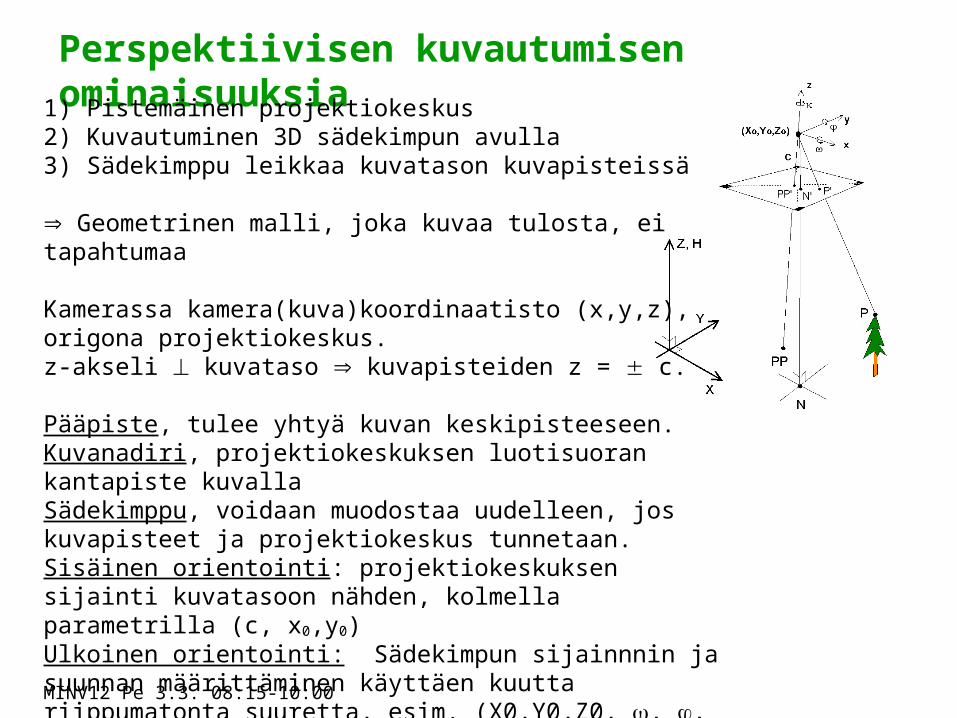
Perspektiivisen kuvautumisen ominaisuuksia
1) Pistemäinen projektiokeskus2) Kuvautuminen 3D sädekimpun avulla3) Sädekimppu leikkaa kuvatason kuvapisteissä
Geometrinen malli, joka kuvaa tulosta, ei tapahtumaa
Kamerassa kamera(kuva)koordinaatisto (x,y,z), origona projektiokeskus. z-akseli kuvataso kuvapisteiden z = c.
Pääpiste, tulee yhtyä kuvan keskipisteeseen.Kuvanadiri, projektiokeskuksen luotisuoran kantapiste kuvallaSädekimppu, voidaan muodostaa uudelleen, jos kuvapisteet ja projektiokeskus tunnetaan.Sisäinen orientointi: projektiokeskuksen sijainti kuvatasoon nähden, kolmella parametrilla (c, x0,y0)Ulkoinen orientointi: Sädekimpun sijainnnin ja suunnan määrittäminen käyttäen kuutta riippumatonta suuretta, esim. (X0,Y0,Z0, , , )
MINV12 Pe 3.3. 08:15-10:00
Perspektiivisen kuvautumisen ominaisuuksia
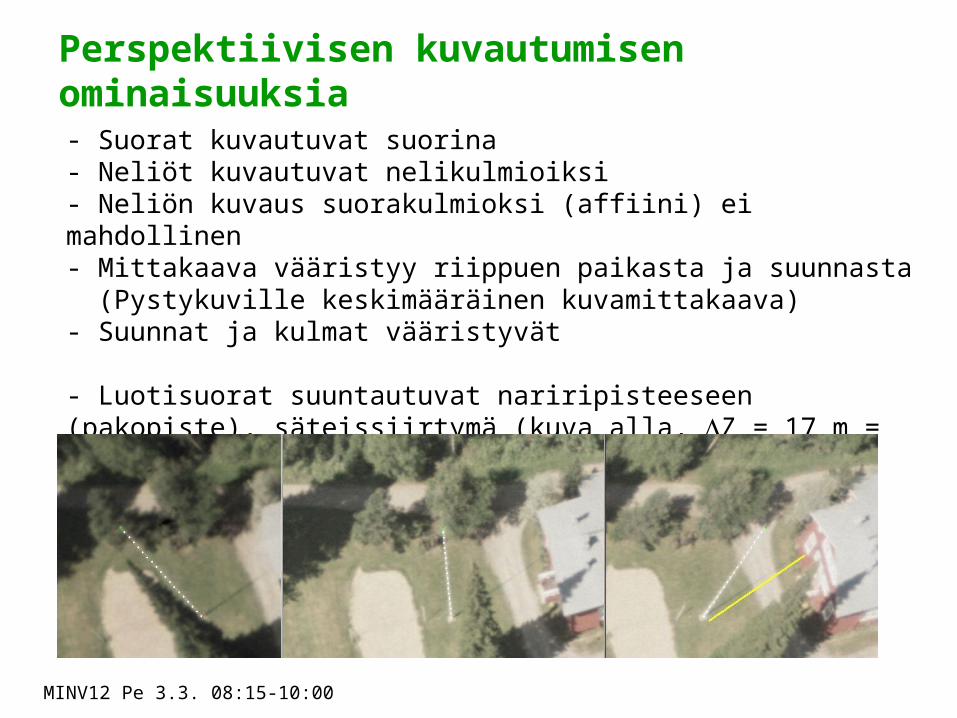
- Suorat kuvautuvat suorina- Neliöt kuvautuvat nelikulmioiksi- Neliön kuvaus suorakulmioksi (affiini) ei mahdollinen - Mittakaava vääristyy riippuen paikasta ja suunnasta (Pystykuville keskimääräinen kuvamittakaava)- Suunnat ja kulmat vääristyvät
- Luotisuorat suuntautuvat nariripisteeseen (pakopiste), säteissiirtymä (kuva alla, Z = 17 m = Hyytiälän lipputanko, varjo 16.6 m)

Perusteita SENSORITMittakamerat - ilmakuvakamerat
- Toteuttavat neulanreikäkameramallin erittäin tarkasti- Stabilointi ja liikkeenkompensointi- Filmikamerassa vakuumi → kuva piirtyy tasolle- Kalibrointi, 2-4 v välein, polttoväli/kameravakio, reunamerkkien sijainti, pääpisteen sijainti, radiaaliset ja tangentiaaliset piirtovirheet, kromaattinen aberraatio- polttoväli voi muuttua ilmanpaineen ja lämpötilan vaikutuksesta (saattaa aih. ongelmia käytettäessä DSO:ta) - Kuvakoko tavallisesti 23 x 23 cm, polttoväli 15, 21 tai 30 cm max FOV ~ 45o, 25o ja 16o Laajakulmakamera, välikulmakamerat, pitkän polttovälin kamerat

MINV12 Pe 3.3. 08:15-10:00
- Filmi rullalla, ~ 0.12 mm paksua, itse emulsio 0.02 mm, Lämpölaajeneminen ~0.002% per Celsius-aste Kutistuu säilytettäessä, suurin kutistuminen heti kehityksen jälkeen ~ 0.05 – 0.1 %.
- Filmillä maksimaalinen erotuskyky, MTF, 50-400 viivaparia/mm, riippuen filmityypistä ja mittauksessa käytetystä kontrastista
- VÄI-filmi: UV ja sininen (suodatetaan), vihreä → sininen, punainen → vihreä, lähi-infra → punainen.
Perusteita SENSORIT

Perusteita... kuvanmuodostuksesta
Ilmakuvan digitointi
- Filmi skannataan fotogrammetrisella skannerilla.- Digikameroiden CCD-anturit 11k x 7 k
Fotogrammetrinen skanneri, Min ~ 7 m 32k32k 3-4 Gt, kun kvantisointi tehdään N 6-12 bitillä
Skannauksen jälkeen tietokoneoheislaitteineen fotogrammetrisiintehtäviin (orientaatiot, mittaus,kuvalaboratorio). Digikameraa käytettäessä selvitään ilman kehitystä ja skannausta ja saavutetaan yl. parempi radiometrinen laatu.
http://www.wehrliassoc.com/

MINV12 Pe 3.3. 08:15-10:00
Perusteita... ilmakuvaus
Pituuspeitto-% = kuvakannan suhde kuvasivun pituuteen, stereokuvauksissa 50-70 %. Kuvassa vas. ~ 70 %. Kuvakanta = kahden peräkkäisen kuvan projektiokeskusten välinen suora ja sen pituus.Sivupeitto-% = vierekkäisten kuvalinjojen kuvien peitto-%, yleensä 20-30 %, kuvassa 60 %.GPS-navigointi kuvanottopisteet osuvat määriteltyihin tarkkuudella joka on parempi kuin 50 m.Mittakaava = on vakio kohteille, jotka ovat tasolla joka on kohtisuorassa kamera optisen akselin kanssa, vakioetäisyydellä kamerasta. Ilmakuville määritellään nimellinen MK maaston keskikorkeuden avulla olettaen täydellinen pystykuvaus.
ipi.uni.hannover

Perusteita - ilmakuvauksen suunnittelu ja tilaus Kuvaussuunnitelma / tarjouspyyntö
Alue, kamera (filmi ja suotimet), mittakaava, peitot / kuvanottopaikat (X,Y,Z) ja navigointitarkkuus.
Kameran stabilointi, suora georeferointi, kuvaoikeudet, digitointi, siirtomedia, kuvatuotteet (raaka / ortokuvat / suurennokset / pinnakkaiset), laatukriteerit (kansallisia, eri järjestöjen)
Tukipisteaineisto + signalointi (mittaus, arkistot, sign. rakentaminen)
33 asteen aurinkokulma ja pilvetön sää (ei utua) 21.6. 2½ kk (max 7 tuntia / vrk)"Fenologia" topografiset kuvaukset (kevät) vs. metsäkuvaukset (kesä).





























