Embed Size (px)
Citation preview

Milestone #2Line Following Using
Photo-transistors
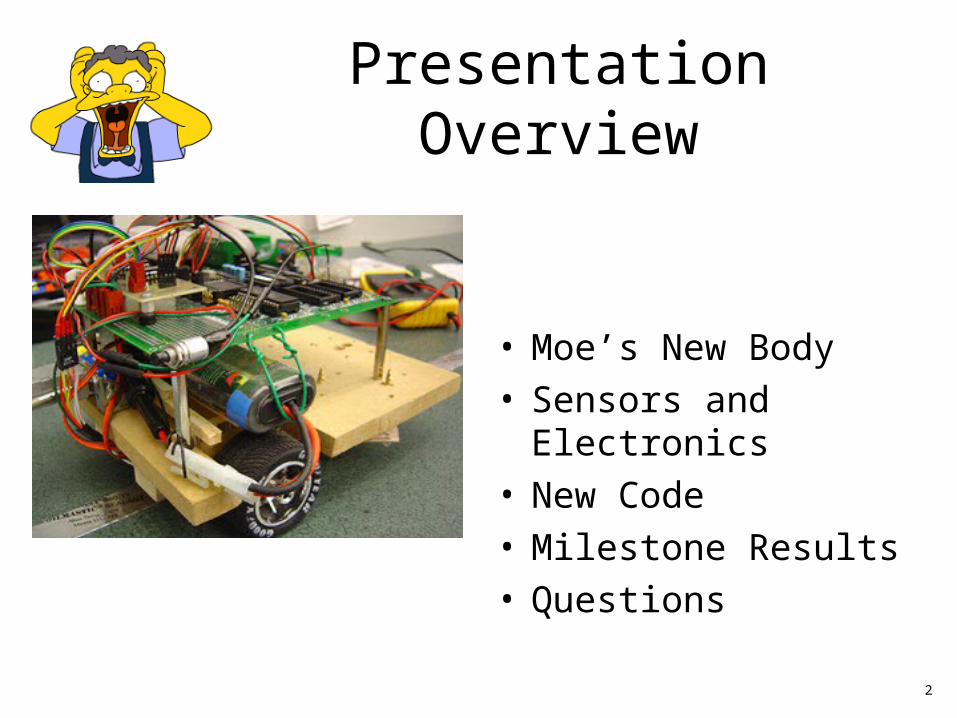
Presentation Overview
• Moe’s New Body• Sensors and Electronics• New Code• Milestone Results• Questions
2

Moe’s New Body
Original Body 20.4cm x 25.4cm = 518.16cm2
New Body 17.2cm x 21.2cm = 364.64cm2
Reduction of ~30%
3

Moe’s New Body
• Small and more compact
• still lots of room
• Bolt more stable than caster
• 85% of weight over rear axle
• Wheels protected from snagging
4

Moe’s New Tires
Increase of ~675% in Surface Area
6.75cm x 0.5cm 2cm x 0.5cm = 1cm2
5.25cm x 3.0cm 2.25cm x 3.0cm = 6.75cm2
Size Traction Area
Old
New
5
• Less slipping• Better performance climbing slopes

Moe’s New Wheelbase
Original Wheelbase 24.5cm wide*
New Wheelbase 17cm wide*
Reduction of ~30%
6
*As measured from outside of wheels
• Tighter, faster turning• Turning harder to control

Moe’s Electronics
7
Kill Switch - cuts power to the H-bridge
Auto-Start Button - resets program stored in memory
Photo-Transistor Arrays - detects line using 4 emitter-sensor pairs

Moe’s Electronics
8
Electronics stacked to fit smaller footprint• build high rather than wide• concentrate weight over back wheels

Moe’s Sensor Design
2 - 2.5cm wide strips of balsa1 - 1cm2 square balsa
Sensors mounted perpendicular to each other
Steering bolt adjusted to obtain proper height from table (2cm)
9

Moe’s Sensors I
Sensor arrays mounted in a line
Pros: - simplicity
Cons: - we only used inside two pairs - tells us very little about the line
10

Moe’s Sensors II
11
Sensors mounted at ~45o
Pros: - detect upcoming turns using front-most pairs - basic line following with inner two pairs
Cons: - slightly more complex logic - and …

Moe’s Sensors II
12
Turning corners on short section of track often placed front sensor pairs past next turn.
Moe then believes that there is no corner and ends up missing next turn.
Testing showed this happened on 33-50% of turns on the short track section

Moe’s Sensors II
13
Move sensor arrays back 2cm. This doubles our error margin, meaning that our turns need not be as accurate.
Moe successfully negotiates corners on the short track with 95-99% accuracy.

Moe’s Sensors III
Sensors moved 2cm towards servos
Previously: recognized 50-66% of short track turns
Now: recognizes 95-99% of short track turns
~85% increased sensitivity
14

Moe’s Sensor Trouble
However, we often had trouble with this turn. For some reason, the sensors would seem to randomly miss it.
We have yet to determine the reason for this.
15
Missing this turn occurs
~25% of the times Moe
attempts to negotiate it.

Moe’s New Code
• INIT - define constants, ports, pins and delay timers
• CONTROL - define motion directions, speeds, and variables
•LINE - define line-following instructions - differentiate between hard and short turns - short turns used to perform small corrections to line-following - compensates for our servos operating at different rates - hard turns used to make 45o turns
•AUTO_START - loads line-following routines into memory
16
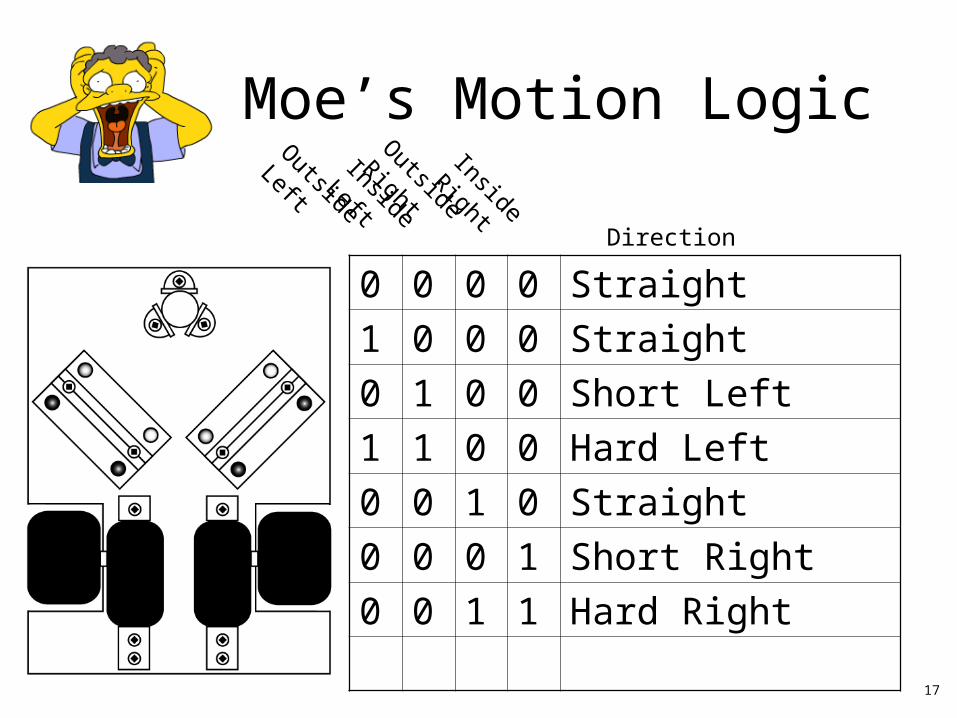
Moe’s Motion LogicOutside Left
17
0 0 0 0 Straight
1 0 0 0 Straight
0 1 0 0 Short Left
1 1 0 0 Hard Left
0 0 1 0 Straight
0 0 0 1 Short Right
0 0 1 1 Hard Right
Inside Left
Outside Right
Inside Right Direction

Milestone Results
Last Place, again…
18
Moe seems to have performance issues when it comes to the milestone challenges.
During testing:- averaged ~21 seconds per lap- however, he only averaged 2-3 laps before failing- battery level ~9.30V to ~9.48V
Our battery level dropped between trials during Friday’s test because we switched of the servos, but the sensors were still drawing power.
We want to either run the sensors off a separate power source, or wire the kill switch to cut power to the sensors as well as the servos.

Milestone Time Log
19
Hardware: 22+ hours
Software: 18 hours
Documentation: 18 hours
Total: 52+ man hours

Questions
?
20