Embed Size (px)
Citation preview

Microprocessor Technology in
Ankle Prosthetics
Arizona State University
Dr. Thomas Sugar
Former Students
LTC Joseph Hitt, PhD
Dr. Kevin Hollander
Dr. Matthew Holgate
Dr. Jeffrey Ward
Mr. Alex Boehler
Mr. Ryan Bellman

Human Machine Integration Laboratory
• Design Unique Compliant Actuators
• Developing Powered Prosthetic Ankles
• Developing Exoskeletons for Running

Robotic Tendon drives a powered AFO
Translating a spring back
and forth to achieve the
desired position and forces

• The Robotic Tendon (RT) – Designing SPARKy (Spring Ankle with
Regenerative Kinetics)
Agenda

SPARKy (Spring Ankle with
Regenerative Kinetics)
• Our goal:
Develop a new generation of powered
prosthetic devices based on lightweight,
energy storing springs that will allow for
more functional gait.

Microprocessor Controlled Prostheses
The Endolite Adaptive Knee and the Otto Bock C-Leg
Proprio Foot by Ossur PowerFoot by MIT and iWalk
Robotic knee/ankle Goldfarb

Human Centric Approach
to Wearable Robotics Human Centric
Compliant
Actuators
Continuous
Control
System Efficiency

Robotic Tendon Based Ankle
• Powered Ankle Prosthetic – Walking, Walk on inclines/declines, Walk backwards
– Ascend/Descend stairs, Jumping, Running

Robotic Tendon Based Ankle
• Powered Ankle Prosthetic – Walking, Walk on inclines/declines, Walk backwards
– Ascend/Descend stairs, Jumping, Running

Studying Human Gait
A single human walking gait cycle.
Ankle angle and normalized moment data. The highlighted region is the push off phase of gait.
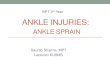
Passive Systems
No push-off at
the ankle.
No rotation at the
ankle.
• Passive and untunable.
• Provides minimal
power generation (25%
of AB) and ankle
motion 15% of AB).
Sagittal plane ankle angle, moment, and power for a male below the
knee amputee using a SACH foot walking at 1.13 sec/step, solid line,
versus that of an average able-bodied subject, dashed line.

Ankle Gait Analysis
Plantarflexion (Toes Down)
Dorsiflexion (Toes Up)

Ankle Gait Power
Assumptions: 80 kg person, walking at 0.8 Hz (1.25 sec/cycle)

Robotic Tendon Concept
Robot Tendon
Concept
m g o
Fx x a
K
gait powerspring power
m g
F FP F x
K
Motor Power:


Robotic Tendon Actuator
• Robotic Tendon
m

Why use springs?
• Springs are Powerful
• Springs are Efficient
• Springs are Lightweight
• Springs are Economical
• Springs are Compliant
(308,000 W/kg)
(0.999 for spring steel)
(easily mass produced)
( 0.05 kg)
(safety built-in )

The spring and motor power add to provide the desired output power
required for gait. Notice that at 40% of gait, the spring and motor work in
opposite direction to store elastic energy and at 50% gait, the spring
provides majority of the output power.
Power Decomposition

The subject walks on a treadmill at 2.2 mph. The ankle has 9 degrees of
dorsiflexion and more importantly 23 degrees of plantarflexion. The user
has complete control of the ankle motion because the output side of the
spring is not controlled. The ankle motion fits the model extremely well.
Ankle Motion

The ankle moment matches the model very well.
Ankle Moment

The subject walks at 2.2 mph. Measured power out, Po, and power at the nut, Pm,
for the test series with a 36KN/m spring and a 9 cm lever at 1 m/s (2.2 mph). The
device achieves a very high level of power amplification of 3.7. This is the unique
advantage of a Robotic Tendon.
Ankle Power

Key Accomplishments
• User has full range of sagittal ankle motion comparable to able-bodied gait. (23 degrees of plantar-flexion, 7 degrees of dorsiflexion.)
• User has 100% of the required power for gait delivered at the correct time and magnitude.
• The peak output power is 3-4 times larger than the peak motor power allowing a reduction in motor size and weight.
• Allows a highly active amputee to regain high functionality and gait symmetry.

Design and Build SPARKy 2
• Actuation: A Maxon RE40, 150 Watt motor, roller screw and helical spring assembly.
• Sensors: motor encoder, and ankle encoder, rate gyro
• FS 3000 Keel from Freedom Innovations.
Lever arm
Spring
FS 3000 Keel
RE 40 Motor
Roller screw
Robotic
Tendon
Ankle
Joint

Electronic System
• Control Platform: Matlab, Simulink, Real Time Workshop Toolbox.

Electronic System
• Design Code using a Graphical Interface in Simulink/Matlab
• Use Specific Toolboxes for Device Hardware – We use the Kerheul Toolbox for Microchip dsPIC processors
• Matlab Real Time Workshop generates C-Code automatically
• Download code using MPLAB
Solution
A Robotic Tendon stores and releases
energy during the gait cycle
A tuned spring for a given individual
reduces peak motor power and energy as
compared to a traditional motor/gearbox
system
The proximal side of the spring uses robust
position control

Vision
Compliant Actuators:
• Study the kinematics and kinetics to use springs that are
tuned to the body’s movement
• Energy storage
• Reduce power/energy requirements
Microprocessors:
• Easier to program and develop high-level control
• Very cost-effective
• Future – BeagleBoards, Rasberry Pi ….











![Microprocessor-controlled Lower Limb Prostheses1].pdfLower limb prostheses are designed to replace the normal function of the knee and/or ankle. Microprocessor-controlled lower limb](https://img.dokumen.tips/doc/110x75/5e7cc4d758b12e78f474a9a9/microprocessor-controlled-lower-limb-prostheses-1pdf-lower-limb-prostheses-are.jpg)