Embed Size (px)
Citation preview

18
Microarchitectural Transformations Using Elasticity
MARC GALCERAN-OMS, eSilicon CorporationALEXANDER GOTMANOV, Intel CorporationJORDI CORTADELLA, Universitat Politecnica de CatalunyaMIKE KISHINEVSKY, Intel Corporation
Elasticity is a paradigm that tolerates the variations in computation and communication delays. By ap-plying elastic transformations that allow varying the original timing, circuits can be optimized beyond theconventional rigid transformations that do not modify the external timing.
Pipelining is one of the classical techniques to improve the throughput of a circuit. This article revealshow elasticity can be effectively and practically used to derive pipelined circuits by using correct-by-construction transformations that can be fully automated. Two designs, one of them industrial, are used todemonstrate how the area-performance trade-off can be explored using elasticity.
Categories and Subject Descriptors: B.1.1 [Control Structures and Microprogramming]: ControlDesign Styles; C.1.3 [Processor Architectures]: Other Architecture Styles—Pipeline processors
General Terms: Design, Performance
Additional Key Words and Phrases: Elastic circuits, pipelining, asynchronous circuits, latency insensitivity
ACM Reference Format:Galceran-Oms, M., Gotmanov, A., Cortadella, J., and Kishinevsky, M. 2011. Microarchitectural transforma-tions using elasticity. ACM J. Emerg. Technol. Comput. Syst. 7, 4, Article 18 (December 2011), 24 pages.DOI = 10.1145/2043643.2043648 http://doi.acm.org/10.1145/2043643.2043648
1. INTRODUCTION
The increasing complexity of VLSI systems has stimulated an intense effort in designautomation to make circuit production scalable and economically viable. In the front-end flow, logic synthesis has been the area in which designers have delegated mostof the responsibility for circuit optimization to EDA tools. But logic synthesis worksunder a very strict behavioral constraint: keeping cycle-accurate equivalence.
Circuits can be further optimized when cycle-accuracy can be transgressed. Thisis the case of pipelining that has been one of the fundamental techniques for increas-ing the throughput of microprocessors for several decades. While the advantages ofpipelining are clear, they come with the cost of certain disadvantages that affect thecomplexity and correctness of the circuits.
This work has been supported by grants from Intel Corporation, the project FORMALISM (TIN2007-66523)and FI from Generalitat de Catalunya.This work was performed while Marc Galceran-Oms was at Universitat Politecnica de Catalunya.Authors’ addresses: M. Galceran-Oms, eSilicon Corp., Barcelona; A. Gotmanov, Strategic CAD Labs, IntelCorp., Moscow; J. Cortadella, Universitat Politecnica de Catalunya, Barcelona; M. Kishinevsky, StrategicCAD Labs, Intel Corp., Hillsboro.Permission to make digital or hard copies of part or all of this work for personal or classroom use is grantedwithout fee provided that copies are not made or distributed for profit or commercial advantage and thatcopies show this notice on the first page or initial screen of a display along with the full citation. Copyrightsfor components of this work owned by others than ACM must be honored. Abstracting with credit is permit-ted. To copy otherwise, to republish, to post on servers, to redistribute to lists, or to use any component ofthis work in other works requires prior specific permission and/or a fee. Permissions may be requested fromthe Publications Dept., ACM, Inc., 2 Penn Plaza, Suite 701, New York, NY 10121-0701, USA, fax +1 (212)869-0481, or [email protected]© 2011 ACM 1558-4832/2011/12-ART18 $10.00
DOI 10.1145/2043643.2043648 http://doi.acm.org/10.1145/2043643.2043648
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:2 M. Galceran-Oms et al.
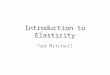
Fig. 1. (a) Original circuit; (b) Equivalent elastic circuit.
Pipelining requires additional memory components to store the temporary in-flightinformation involved in multiple concurrent operations executed simultaneously. Theexistence of causal dependencies between operations requires extra control to avoidhazards that could produce incorrect results. Forwarding and stalling are differenttechniques to guarantee correctness in pipelined circuits.
The design of a pipeline is a difficult and error-prone task. Defining the numberof stages, the location of the extra memory, the control for stalling the circuit, theforwarding paths to avoid data hazards, and so on, are essential decisions that have adirect impact on the performance and complexity of the circuit.
Even though some academic work has been done in the last few years, optimizationstransgressing the observable cycle accuracy are not handled by the mainstream EDAflows. These optimizations are explored manually by the designers at microarchitec-tural level.
1.1. Elasticity
Elastic circuits [Carmona et al. 2009] have emerged as a paradigm to relax the cy-cle accuracy constraints in the design of digital circuits. The concept of elasticity hasbeen largely used in asynchronous circuits. For example, the term micropipeline wasproposed [Sutherland 1989] to denote event-driven elastic pipelines.
When elasticity was discretized to work with synchronous systems, the term La-tency Insensitivity was coined [Carloni et al. 1999]. In these systems, the handshakingis produced at the level of a cycle with events that are synchronized with the clock. Dif-ferent variants of synchronous elasticity were proposed later [Cortadella et al. 2006a;Jacobson et al. 2002; Vijayaraghavan and Arvind 2009].
With elasticity, the sequences of valid data items are observed and preserved as ifone had inserted FIFOs with nondeterministic delays in the communication channelsbetween modules.
Figure 1 shows an example of transforming a circuit into an elastic form. The in-sertion of FIFOs must be done in such a way that the functionality of the system isnot affected. This goal is achieved by using an elastic protocol that synchronizes theread/write operations of the FIFOs and preserves the order of the transferred validdata in every channel regardless of the computation time of the components.
The reader is referred to Carmona et al. [2009] for an extended discussion on differ-ent forms of elasticity, either synchronous or asynchronous.
1.2. Elasticity and Pipelining: A Quick Overview
The primary goal of pipelining is to increase performance. This article will show howelasticity can contribute to exploration of different pipelines at a microarchitecturallevel by applying behavior-preserving transformations. More interestingly, this explo-ration can be automated.
A fundamental transformation for pipelining is memory bypassing1 [Kogge 1981].When bypassing is combined with retiming in the presence of elasticity, the forward
1In this context, register files are considered a particular case of memories.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:3
paths for avoiding data hazards are implicitly created. Early evaluation is essentialto automatically generate the control for the forward paths with an elegant solutionbased on the concept of antitoken. Elasticity allows inserting bubbles (registers withno valid data) to reduce the cycle time when long combinational paths appear.
All the previous transformations can be automatically explored by using advancedheuristics [Galceran-Oms et al. 2010] and mathematical models to perform retimingand recycling with early evaluation [Bufistov et al. 2009].
To get an initial idea of the power of elasticity in improving the throughput of thesystem, the reader may look at Figure 8, where an unpipelined circuit is progressivelytransformed into a pipelined one by introducing elastic transformations. Another no-torious example is the DLX microprocessor, showing how the initial circuit (Figure 11)can be transformed into a pipelined microprocessor (Figure 12), in which the classicalload-store buffer for memory is automatically inferred. The details will be discussedin their corresponding sections.
1.3. Organization of the Article
This article reviews the basic concepts of elasticity and the behavior-preserving trans-formations using elasticity that have been proposed in the literature (Section 2). Thearticle also gives a general view of the transformations, extending them to variousforms of elasticity (Section 3). Even though the examples selected in the article aresynchronous, the transformations are equally applicable for asynchronous versions ofthe same circuits obtained by desynchronization [Carmona et al. 2009; Cortadella et al.2006b].
Section 4 discusses how different pipelines can be automatically explored by sys-tematically applying elastic transformations. Section 5 presents a complete design ex-periment to evaluate the effectiveness of the elastic transformations. Finally, Section 6discusses advanced transformations that can be automated in future design flows.
2. ELASTIC SYSTEMS
An elastic system is a collection of elastic modules and elastic channels. Elastic chan-nels contain FIFOs that store the data being transferred between the sending and thereceiving modules. The FIFOs are controlled by an elastic protocol that keeps trackof the availability of data (e.g., FIFO not empty) and the ability to receive more data(e.g., FIFO not full). The simplest protocol needs two handshake signals that are typi-cally called valid (in the forward direction) and stop (in the backward direction). Whenelasticity is asynchronous, these signals are usually called request and acknowledge.
The stop signal is the one that controls the back-pressure and prevents a global stallwhen any of the modules cannot accept input data. The storage provided by the inputFIFOs and the handshake protocol allow distributing the stall conditions along theelastic channels [Carloni 2006].
2.1. Elastic Buffers
Elastic channels must have a minimum storage of two items to achieve the maximumthroughput of the system, assuming that the forward and backward latencies of theelastic channels are one clock cycle [Carloni et al. 1999]. This is a necessary condition,but not sufficient. In some cases, the capacity needs to be increased to achieve theoptimal throughput [Lu and Koh 2003].
Various schemes have been proposed to implement elastic channels. In Carloniet al. [1999], relay stations based on flip-flops were initially proposed. In asynchronousdesign, latch-based designs have been typically used (e.g., as in Micropipelines[Sutherland 1989]). Based on these schemes, latch-based implementations were also
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:4 M. Galceran-Oms et al.
Fig. 2. (a) Elastic buffer; (b) Coarse-level control of functional blocks.
Fig. 3. Graphical representation of EBs: (a) with token, (b) without token (bubble).
proposed for synchronous elasticity [Cortadella et al. 2006a; Jacobson et al. 2002].In this article, we will generically refer to the storage components used in elasticchannels as Elastic Buffers (EB), regardless the specific details of their implementation.
At a fine level of granularity, EBs can be implemented by substituting flip-flops forpairs of latches (master/slave) with independent control. This is the strategy also pro-posed to desynchronize circuits [Cortadella et al. 2006b]. Figure 2(a) depicts a blockdiagram of an EB with two latches. This scheme is valid either for synchronous orasynchronous elasticity, depending on whether the events of the handshake signalsare synchronized with the clock.
At a coarse level of granularity (see Figure 2(b)) elasticity can be implemented bysimply adding one latch for each of the inputs of an elastic module. As in the previouscase, the input latch plays the role of master and handles the back-pressure, whereasthe internal registers play the role of slaves. With this scheme, the handshake pro-tocol is identical and the modules are not touched. This is a practical approach toincorporate elasticity without modifying any of the existing IPs in the system.
In the initial state, every EB may have either one valid data item (representing theinitial value of the register in a nonelastic system) or no valid data (empty). We willcall these configurations token and bubble respectively, as illustrated in Figure 3. Forsimplicity, every EB will only be represented as one box with token or bubble dependingon its initial state. Note that EBs can have at most one token in their initial state. Thestorage of more tokens will only occur dynamically as the result of handling back-pressure from the receiving module.
2.2. Early Evaluation
The execution model of conventional elastic systems is based on strict evaluation: acomputation is initiated only when all input data are available. This requirementcan be relaxed if early evaluation is used. Consider a 2-input multiplexor that can bemodeled using the following statement.
z = if s then a else b .
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:5
Fig. 4. Movement of tokens and antitokens for early evaluation.
If s is available and its value is true, there is no need to wait for the arrival of b . Then,the result can be produced as soon as a arrives. A similar situation occurs when s isfalse and b arrives.
Early evaluation contributes to increasing the performance of elastic systems at theexpense of additional control for guaranteeing the correct execution. In particular, thespurious enabling of functional units must be prevented when the late inputs arriveafter the completion of the computation. These late inputs must be ignored.
One of the mechanisms to discard late inputs is the use of negative tokens, alsocalled antitokens. Each time an early evaluation occurs, an antitoken is generated atevery non-required input in such a way that it annihilates when it meets a valid dataitem (positive token [Cortadella and Kishinevsky 2007]).
Figure 4(a) depicts a circuit in which early evaluation contributes to improving per-formance. The circuit contains valid data in all registers with token (•). The 0-input ofthe multiplexor has no valid data, however the control signal indicates that the 1-inputmust be selected. In this situation, there is no need to wait for the late data producedby the ALU.
Figure 4(b) shows that the 1-input has been sent to the output of the multiplexor.Additionally, an antitoken (�) has been sent backward to the 0-input to annihilatethe pending data from the ALU. When the result from the ALU arrives, as shown inFigure 4(c), the valid data and the antitoken meet (�• ) and cancel each other, thusdisregarding the nonrequired data, as shown in Figure 4(d).
Early evaluation is an essential mechanism to generate a correct control for bypass-ing schemes or to implement speculation techniques (e.g., branch prediction). Eventhough the concept of early evaluation can be applied to general combinational logic,it becomes useful mainly in multiplexors.
The idea of antitokens was initially used in Kishinevsky et al. [1994] to handleOR causality in Petri nets. Various implementations exist both in synchronous (e.g.,Casu and Macchiarulo [2007]) and asynchronous (e.g., Reese et al. [2005]) circuits.Among the different implementations of antitokens, two main classes have been dis-tinguished: passive antitokens, that statically wait for the arrival of tokens, and activeantitokens, that move backward to meet tokens. Hybrid approaches combining activeand passive antitokens are also possible.
Our experience demonstrates that a good practical choice is to use passive antito-kens as a default design option, because the controller becomes simpler, and to useactive antitoken locally in the regions of the system where passive antitokens becomea bottleneck—a very rare case. In most design examples we have observed that theperformance gain by using active antitokens is not significant, even though a syn-thetic counterexample can always be constructed. A choice of the type of antitokenscan be done during fine-tuning of the microarchitecture.
3. BASIC TRANSFORMATIONS
One of the major features of synchronous elastic systems is their tolerance to latencychanges. Such tolerance can be used to introduce novel correct-by-construction trans-formations enabling the exploration of new microarchitectural trade-offs [Kam et al.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:6 M. Galceran-Oms et al.
Fig. 5. Correct-by-construction transformations [Kam et al. 2008].
Fig. 6. Design after, (a) retiming, (b) retiming and recycling, (c) early evaluation, (d) antitoken insertion.
2008]. In some cases, the cycle time of the system can be reduced by increasing the la-tency of some operations. By properly balancing cycle time and throughput, the systemwith the optimal effective cycle time can be achieved.2
This section presents a set of transformations that can modify the latency of thecommunications and computations of an elastic system (see Figure 5). Verification us-ing model checking shows that they preserve system functionality, i.e., the system afterapplying each of the transformations is latency equivalent [Krstic et al. 2006] to theoriginal one.
3.1. Latency-Preserving Transformations
This section presents two transformations that do not change the latency of the com-putations and preserve the functionality of the design: bypassing and retiming.
At a certain level of abstraction, a register file or a memory can be represented bya monolithic memory element and additional logic to write (W) and read (R) data (seeFigure 5(a)). The channels wd and rd represent data, whereas the channels wa and rarepresent addresses.
Bypasses have been widely used since the late 50s [Bloch 1959], to resolve datahazards in processors [Hennessy and Patterson 1990]. Figure 5(a) shows a memoryafter a bypass transformation. An EB postpones the write operation by one cycle, and aforwarding path is added so that if the read address is equal to the write address of theprevious operation (RAW dependency), the correct data value can be propagated. In anelastic system, the multiplexor selecting between the forwarded data and the memorydata can be implemented with early evaluation. Multiple bypass transformations canbe recursively applied to the same memory in order to create a bypass network.
Retiming [Leiserson and Saxe 1991] (see Figure 5(b)) is a traditional technique forsequential area and delay optimization. Figure 6(a) shows an example after an optimal
2The effective cycle time is a performance measure similar to the time-per-instruction, TPI, in CPU design.It captures how much time is required to process one token of information—the smaller the better.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:7
retiming. The combinational nodes (shown as circles) are labeled with their delays.The boxes (labeled with dots) represent the elastic buffers with tokens of information(registers with valid data). The cycle time of this design is 17 time units.
3.2. Recycling
It is always possible to insert and remove an empty EB (a bubble) on any channel ofan elastic system (for a formal proof see Krstic et al. [2006]). This transformation isshown in Figure 5(d). Bubble insertion is also known as recycling, and was initiallyintroduced in Carloni and Sangiovanni-Vincentelli [2000]. The concept of insertingempty buffers for optimizing system performance was long known in asynchronousdesign [Manohar and Martin 1998; Williams 1994].
Figure 6(b) shows an optimal configuration combining retiming and recycling for theexample from Figure 6(a). The cycle time has been reduced to 11 units. The throughputis determined by the slowest cycle. The token/register ratios for each cycle are 1, 4/5,and 2/3. Therefore, the throughput is 2/3, and the average number of cycles to processa token is 3/2. This provides an effective cycle time of 16.5 time units (16.5 = 11 · 3/2).It means that a new token is processed on average every 16.5 time units—an improve-ment compared to the 17 units of the optimally retimed design.
Early evaluation can be used to further optimize an elastic system. Figure 6(c)shows the example from Figure 6(b) after applying early evaluation to the node, withdelay 1, and adding a bubble on one of the input channels of the multiplexor. Eachdata input of the multiplexor has been assigned the probability of being selected bythe control input, to enable throughput analysis. The example from Figure 6(c) has acycle time of 10 time units, which is lower than the 11 units in Figure 6(b). Withoutearly evaluation, its throughput would be 0.5, as determined by the slowest cycle.Then, the effective cycle time would be 20 units—worse than the 16.5 units obtainedfor the previous configuration. However, when early evaluation is introduced, the cyclewith the worse throughput is only selected by the multiplexor in 10% of the cases. Ifthe system is simulated using the given probabilities, the obtained throughput is 0.79.Thus, in this example, early evaluation allows one to reduce the effective cycle time to12.65 units (10/0.79).
3.3. Antitoken Insertion
Antitokens are used to cancel spurious computations in early-evaluation nodes, butthey can also be used to enable new retiming configurations. An empty EB is equivalentto an EB with one token of information followed by an antitoken injector with oneantitoken (drawn as a pentagon), as shown in Figure 5(e). Antitoken counters can beretimed (as in Figure 5(c)) and grouped (as in Figure 5(g)). When retiming antitokens,care must be taken with the initial values of the registers so that functionality doesnot change.
Antitoken insertion can be often applied to enable retiming of EBs that initiallycontain a different number of tokens (e.g., a bubble with an elastic buffer that containsone token). Figure 6(d) shows a system where antitoken insertion has been applied tothe dashed channel. Then, the new EB can be retimed through the multiplexor. Thisnew configuration has a cycle time of 11 units, but its throughput is very high, 0.918,since there is only one cycle with a bubble (a sum of a token and an antitoken is equalto zero) as compared to Figure 6(c), where two out of the three cycles have bubbles.The resulting effective cycle time, which can only be achieved by using the antitokeninsertion transformation, is 11.98 units.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:8 M. Galceran-Oms et al.
Fig. 7. (a) Pipeline with two functional blocks, F and G, (b) separation of Little Cares (LC) from CriticalCore (CC), (c) optimization of the Critical Core branch, (d) insertion of bubbles into the Little Cares branch.
3.4. Variable-Latency Units
Variable-latency units (VLUs) can be handled in a natural way in synchronous elasticsystems. A handshake with the datapath unit is required so that the control can keeptrack of the status of operation, as shown in Cortadella et al. [2006a].
For example, an ALU may spend one clock cycle to compute frequent operations withsmall operands (operands with few significant digits), and spend two clock cycles forrare operations involving larger operands. This is a typical example of a telescopic unit[Benini et al. 1999; Su et al. 2007]. VLUs can improve the performance by decreasingthe overall cycle time, and they can also improve the area of the design by reducingthe number of logic gates per cycle of operation.
In the example from Figure 6(d), the critical cycle is determined by the dashed nodewith delay 9 followed by the node with delay 2. Assume we can replace the dashednode with a variable-latency node that has a typical delay of 7 time units at the costof spending an extra cycle (14 time units) in rare cases. Then, the cycle time of thesystem will drop from 11 to 9 units. Let us assume that the short operation can beapplied 95% of the time. Then, the throughput of the system is 0.881, as estimated bysimulating the controller. The resulting effective cycle time is 10.216 units (9/0.881),compared to the previous 11.98. Overall, correct-by-construction transformations haveprovided a 66% improvement in performance for this example.
3.5. Buffer Capacities
While buffer insertion in Figure 5(d) is formulated for the elastic buffer with capacitytwo, it holds for the elastic buffer of any capacity k ≥ 0. Moreover, if the latency of thebuffer is equal to 0 (implementable as a FIFO with a bypass), the performance of thedesign as measured by the throughput cannot decrease. The rhombus in Figure 5(f)stands for a 0-latency buffer (also called skid buffer) with capacity k.
3.6. Little Cares
VLUs illustrate a general principle of optimizing circuit performance for those casesthat are expected to appear most frequently during computation. Due to their singleserver semantics, VLUs are most efficient for relatively small blocks, e.g. individualarithmetic units, pipeline stages, and so on. However, the idea of variable latencycan be extended to larger design components containing entire pipelines, memories,finite-state machines, and so on.
Consider a simple example of two pipeline stages in a loop in Figure 7(a). Supposethat the functional blocks F and G have a delay of 100 time units each. Effective cycletime (ECT) of the system would then be 100.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:9
Suppose that there are two types of tokens flowing through the pipeline. Tokens ofthe first type occur with high probability, α, and tokens of the second type occur withlow probability, 1 − α. To improve the effective cycle time we can replace F and G withequivalent VLUs optimized for tokens of the first type. Note however that introduc-tion of VLUs is done locally within each stage, while both types of tokens continue toshare the same pipeline. Alternatively, we can completely decouple implementation offrequent and rare behaviors by separating the pipeline into two branches, as shown inFigure 7(b). We will informally refer to the frequent behaviors, induced by tokens ofthe first type, as the Critical Core (CC); and to the rare behaviors, induced by tokensof the second type, as the Little Cares (LC).
After the separation, we can optimize CC and LC pipelines independently using anyapplicable transformations. In practice, LC behaviors include many complex cornercases, which can now be ignored while addressing the performance-critical part of thecircuit (CC). To obtain the pipeline in Figure 7(c), we focus on the CC branch andreduce timing of the functional blocks from 100 to 50 time units. Note that we canapply any sequential transformations like retiming, speculation, bypassing, and so on,which may be inefficient for the pipeline in Figure 7(a), but become practical for theCC branch (for concrete examples see Section 5). To take advantage of the optimizedCC part, we need to reduce the cycle time of the LC branch, which is done by insertingempty elastic buffers into its timing-critical paths (see Figure 7(d)). The final circuitis effectively a pipelined variable-latency unit. Its effective cycle time depends on thevalue of probability α. For α = 0.0, there is no speedup, because all computations arecarried out by the slow LC branch. Maximum speedup of 2× occurs at α = 1.0. In themore realistic case of α = 0.9, effective cycle time is improved by approximately 1.67×.
3.7. A Simple Pipelining Example
Starting with a functional specification graph of a design, it is possible to obtain apipelined design by using the elastic transformations presented in this section.
Bypasses with early-evaluation multiplexors are essential for pipelining, since theyintroduce new EBs that can be retimed backwards. In order to pipeline a design, by-passes must be inserted around register files and memories of the functional model.Then, the graph is modified to enable forwarding to the bypass multiplexors. Finally,the system can be pipelined by retiming the EBs inserted with the bypasses and usingother transformations such as recycling or antitoken insertion.
Figure 8(a) shows a specification of a simple design. The register file RF is theonly state-holding block. IFD fetches instructions and decodes the opcode and registeraddresses. ALU and M are arithmetic units. The results are selected by the multi-plexor for RF write-back. M has been divided into three nodes. The breaking up oflogic to allow pipelining is a design decision that is typically considered in concert withpipelining decisions. Thus, the user may try to divide a functional block into severalnodes and let the optimization algorithm decide the best channels to place the EBs.
In Figure 8(b), the bypass transform has been applied three times on RF to build abypass network. Node DD receives all previous write addresses and the current readaddress in order to detect any dependencies and determine which of the inputs of thebypass multiplexor must be selected. The conventional use of bypasses is to forwarddata already computed to the read port of the bypassed memory element. In addition,this bypass network can be used as a data hazard controller, taking advantage of theunderlying elastic handshake protocol with early evaluation to handle stalls.
The right-most multiplexor and the bypass EBs must be duplicated to feed eachbypass path independently, enabling new forwarding paths, as shown in Figure 8(c).Once the forwarding paths have been created, the design can be pipelined by applying
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:10 M. Galceran-Oms et al.
Fig. 8. (a) Graph model of a simple design, (b) after 3 bypasses, (c) duplicate multiplexor, enable forwarding,(d) final pipeline after transformations.
retiming and antitoken insertion, achieving the system in Figure 8(d). The finalelastic pipeline is optimal in the sense that its distributed elastic controller insertsthe minimum number of stalls. Furthermore the pipeline structure is not redundant,since there are no duplicated nodes. Therefore, this is as good as a manually designedpipeline.
Fast instructions that require few cycles to compute, like ALU in this example, usethe bypass network to forward data avoiding extra stalls, while long instructions usethe bypass network as a stall structure that handles data hazards. In this example, theonly possible stalls occur when the paths with antitoken counters are selected by theearly-evaluation multiplexors. This situation corresponds to a read-after-write (RAW)dependency involving a result computed by M, which needs three cycles to complete.
4. AUTOMATIC EXPLORATION OF PIPELINES
The example in the previous section is small enough to allow a manual exploration.However, manual exploration becomes complicated and error-prone for larger microar-chitectural graphs. This section shows how pipeline exploration can be automated. ADLX pipeline is used to illustrate the proposed method.
To enable a quick analysis of the throughput of an elastic system, probabilities mustbe assigned to each of the data inputs of the early-evaluation multiplexors. Further-more, it must be determined how often a data dependency can occur in order to mapthese probabilities to the bypass early-evaluation multiplexors. Such probabilitiesshould be derived from profiling the benchmarks expected to be run on the microar-chitecture. There are no known exact methods for the efficient throughput analysis ofelastic systems with early evaluation. The method in Julvez et al. [2010] returns anupper bound of the throughput using linear programming.
4.1. Retiming and Recycling Optimization
The retiming and recycling transformations can be combined in an optimization prob-lem, as initially presented in Carloni and Sangiovanni-Vincentelli [2003]. This methodcan be extended to handle early evaluation and antitoken transformations [Bufistovet al. 2009]. The problem is formulated as a mixed integer linear programming prob-lem, and it is solved by finding a set of designs that are Pareto points with respect tothe cycle time, τ , and the throughput, �, of the design. The metric to optimize is theeffective cycle time of the elastic system, ξ = τ/�. Thus, the designs found by retiming
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:11
Fig. 9. Example with three nondominated Pareto-point configurations found by retiming and recycling.Their performance metrics are (a) τ = 1,� = 0.5, ξ = 2, (b) τ = 2,� = 0.66, ξ = 3, (c) τ = 3,� = 1, ξ = 3. τ :cycle time, �: throughput, ξ = τ/�: effective cycle time.
Fig. 10. Space of bypass configurations for three memories and navigation from the origin to find an optimalnumber of bypasses.
and recycling, RR, provide different trade-offs between the latency of the computationsand the achievable cycle time for each of these latencies.
For example, Figure 9 shows an example that has three Pareto-point configurations.The first design is the optimal one, since its effective cycle time is 2, compared to3 for the other two configurations. If the early-evaluation multiplexor had differentprobabilities at the inputs, the configurations might be different, or they might be thesame with a different optimum in terms of effective cycle time. RR typically achievesbetter results when the system contains early-evaluation nodes.3
4.2. Exploration Algorithm
Capacity sizing and the number of bypasses to apply to each memory element arethe only transformations that are not explored by the retiming and recycling algo-rithm. We now present an approach to automatically explore these parameters andfind an optimal pipelined configuration of the system. During the exploration, it canbe assumed that all buffers have enough capacity to maximize the throughput of thesystem. The optimal capacity for each elastic buffer and whether to add skid-buffersin any channel can be determined at the end of the exploration by running an ILPproblem [Bufistov et al. 2008; Lu and Koh 2003].
The main question to answer now is: what is the minimal number of bypasses thatmust be included in each memory to achieve a maximum throughput? To illustrate theexploration strategy, we will use Figure 10, which represents the space of configura-tions that can be obtained for a system with three memories. Each point correspondsto a particular number of bypasses applied to each memory. The origin represents theconfiguration without any bypass.
We next present the sketch of a heuristic algorithm that explores a trajectory inthis space for finding the optimal pipelining of the system. The algorithm iterativelyadds bypasses to the memories and applies retiming and recycling until no furtherimprovement is observed in the estimated effective cycle time.
Algorithm 1 shows a sketch of the procedure to find a set of interesting pipelines.At each iteration, a new bypass is added to a subset of memories of the design. Thememory subset is chosen by a heuristic rule (see Galceran-Oms et al. [2010] for more
3See Bufistov et al. [2009] for a table of results that validates this statement.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:12 M. Galceran-Oms et al.
ALGORITHM 1: Exploration for automatic pipeliningexploredPipelines := ∅ (Set of interesting pipelines found during the exploration)ξmin := ∞ (Best effective cycle time found so far)improvement := truewhile improvement do
M := SelectSubsetMemories(G)for m ∈ M do
G.bypass(m) (Add one bypass and forwarding paths to memory m)endnewPipelines := RetimingRecycling(G) (Retiming and recycling optimization)exploredPipelines := exploredPipelines ∪ newPipelinesξbest := BestEffectiveCycleTime(newPipelines)if ξbest ≥ ξmin then improvement := false else ξmin := ξbest
endfor P ∈ exploredPipelines do
Simulate(P) (Estimate the actual throughput by simulation)endreturn exploredPipelines
Fig. 11. DLX initial graph.
details). This corresponds to jumping to a new point in Figure 10. The resulting designhas a certain number of bypasses and forwarding paths in each memory (e.g., the one inFigure 8(c)). Next, retiming and recycling is applied and a set of Pareto-point pipelinesare returned (such as the one in Figure 8(d)). Since the throughput estimated by theretiming and recycling algorithm may not be exact, a set of promising designs is keptin a list during the exploration (exploredPipelines). The algorithm iterates as long asbetter pipelines are found. At the end of the exploration, the most promising designsstored in exploredPipelines are simulated to obtain a more accurate estimation ofthe throughput. Finally, a set of Pareto points with different area/performance/powervalues are delivered.
4.3. DLX Pipeline
Let us illustrate automatic exploration of pipelines on a simple microarchitecture sim-ilar to DLX, as shown in Figure 11 before pipelining. The execution part of the pipelinehas an integer ALU and a long operation F. The instruction decoder ID produces theopcode, oc, that goes to the write-back multiplexor and a target instruction address,ja, that is taken from the previous ALU operation, as stored in the register BR. Table Ishows approximate delays, latency, and area of the functional blocks of the example,taking NAND2 with fanout 3 as unit delay and unit area. In order to obtain theseparameters, some of the blocks have been synthesized in a 65 nm technology libraryusing commercial tools (ALU, RF, mux2, EB, and +4), and the rest of the values havebeen estimated. EB and mux2 delay and area numbers were taken for single bit units.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:13
Table I.
Block Delay (δ) Area Lat. Block Delay (δ) Area Lat.
mux2 1.5 1.5 1 EB 3.15 4.5 1
ID 6.0 72 1 +4 3.75 24 1ALU 13.0 1600 1 F 80.0 8000 1
RF W 6 6000 1 RF R 11 - 1MEM W - - 1 MEM R - - 10
The delay of bit-vector multiplexors and EBs is assumed to be the one shown in the ta-ble, while area is scaled linearly with respect to the number of bits. Multiplexors witha fan-in larger than two are assumed to be formed by a tree of 2-input multiplexors.
Even though a conventional DLX pipeline does not typically include this feature, Fis considered to be a floating point unit. Its total delay is set to 80, around 5 timesthe expected cycle time of the design. Then, it may be partitioned in several stages toallow pipelining. It is assumed that the delay of each stage is 80/D. It is possible toprovide several possible partitions and perform design exploration on each one, thusdetermining the optimal pipeline depth.
The register file is 64 bits wide, with 16 entries, 1 write, and 2 read ports. The totalfootprint of the RF is 6000 units, (including both cell and wire areas). To account forwiring of other blocks, we assume that 40% of the space is reserved for it. Furthermore,we also need to consider the area overhead of elastic controllers. Based on experimentswith multiple design points, a 5% area is reserved for the controllers. Given thatAreaBlocks is the area of the different combinational blocks plus the area of all the EBs,the total area of the design is AreaRF + (AreaBlocks ∗ 1.05)/0.6). The area of the initialnonpipelined design shown in Figure 11 is 23284 units.
The area of the memory subsystem is not taken into account (as it is roughly con-stant regardless of pipelining). It has a parameterized latency of L MEM cycles for theread instruction, which is set to 10 in Table I. A latency of 10 clock cycles for readinstructions is realistic if we consider it the latency of the L2 cache access. Read op-erations are considered to be nonblocking, i.e., a new token can be accepted even ifthe previous one is still in flight. Other parameters of the microarchitecture are thedata dependency probability in both the register file and the memory (γ RF, γ MEM), theprobability of a branch to be taken (pTBR), and the probability of each instruction to beexecuted (pALU + pF + p LOAD + pSTORE + pBR = 1). These probabilities are mapped to theearly-evaluation multiplexors of the graph.
4.3.1. Pipelined Example. Figure 12 shows one of the best design points found auto-matically under the following design parameters: the F unit has been divided intothree blocks, the memory data dependency probability is 0.5 (γ MEM = 0.5), and registerfile data dependency probability is 0.2 (γ RF = 0.2). The instruction probabilities are:(pALU = 0.35, pF = 0.2, p LOAD = 0.25, pSTORE = 0.075, pBR = 0.125). Finally, the probabilityof a branch taken is 0.5. These values are based on the experiments found in Hennessyand Patterson [1990].
In Figure 12, the cycle time is 29.817 time units, due to the F1, F2, and F3 func-tional blocks. Three bypasses have been applied to RF and then EBs have been retimedto pipeline F. Note that an extra bubble has been inserted at the output of F3. Thereduction in the throughput due to this bubble, is compensated by a larger improve-ment in the cycle time (without this bubble the critical path would include the delayof the multiplexors after F3). If the F operation had a higher probability, the designwithout this bubble might be better, since the bubble would have a higher impacton the throughput degradation. Such decisions are made automatically based on the
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:14 M. Galceran-Oms et al.
Fig. 12. Pipelined DLX graph (F divided into 3 blocks. RF has three bypasses and M 9).
Fig. 13. Effective cycle time and area of the best pipelined design for different depths of F. (x,y) and (x,y,z)tuples represent the depth of F, the number of bypasses applied to RF and to MEM (z = 9 if omitted).
expected frequencies of instructions and data dependencies. An alternative way toavoid the bubble after F3 is to add an extra bypass to RF. An extra bypass is indeedthe optimal way to pipeline the design for this particular instance of the parameters.It might not be the case if the data hazard probability was higher.
The bypasses in the memory MEM are used to hide the memory latency via a load-store buffer, as shown in Figure 12. Such a structure can be substituted by a moreefficient implementation: an associative memory. The need for a load-store buffer andits optimal size are detected automatically.
4.3.2. Optimal Depth. Figure 13 shows the effective cycle time and area of the bestdesign points found on different partitions of F, forming a Pareto-point curve. The delayof F is the largest one, and as the number of nodes in which it is partitioned increases,the maximum node delay decreases, and so does the best possible cycle time in thegraph. In the best design for the graph in which F is not partitioned (depth(F) = 1),the effective cycle time is 87.99, the area is 32791, 2 bypasses have been applied to
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:15
RF and 8 bypasses have been applied to MEM. The cycle time of this first point is83.15 (δ(F) + δ(EB)), and the throughput is 0.94. Only back-to-back data dependenciesinvolving F instructions require stalling of the pipeline.
As depth(F) increases, more bypasses are needed on the register file. The area ofthe design increases with more bypasses. For depth(F) = 2, the cycle time is 43.15, thethroughput is 0.86 and the effective cycle time is 49.77. Until depth(F) = 6, the cycletime keeps decreasing because of the deeper pipeline (43.15, 29.81, 23.15, 19.26, 16.48),and so does the throughput because more data hazards must be handled. Overall, theeffective cycle time improves with a deeper pipeline until 6 stages are reached.
For depth(F) = 7, the delay of each stage of F becomes lower than the delay of theALU (δ(Fi) = 80/7 = 11.4), and the cycle time cannot be further improved by increasingthe depth of F. Thus, the best effective cycle time is achieved with F divided into 6stages, 8 bypasses applied to RF and 9 to MEM. Design points (4,5) and (3,4) (circled inthe figure) for 4 and 3 stages are simpler and may deliver a better design compromise.
Different parameters lead to different optimal design points. For example, whenγ RF = 0.5, bypasses can be used more often, and deeper pipelines perform better. Then,the optimal depth of F becomes 7 instead of 6. If the microarchitecture issues ALUinstructions most of the time, the throughput is close to 1, since data dependenciescan always use forwarding in order to avoid stalls. Besides, since F operations arenever selected, fewer bypasses are applied and recycling is used in order to pipelineF. Because of the store buffer added by bypasses on MEM, memory operations canalso be performed with a high throughput. In contrast, if F instructions are the mostcommon ones, the throughput degrades faster, as this instruction always needs to stallthe pipeline when a data dependency occurs.
5. DESIGN EXPERIMENT: H.264 CABAC DECODER
To study how elasticity can help optimizing nontrivial designs we conducted an ex-periment with the H.264 CABAC decoder used in Intel consumer electronics systemon chip. Instead of designing an elastic decoder from scratch, we elasticized and op-timized an existing design, which provided a clear point of comparison and permittedreuse of the validation environment and collaterals. In our studies we often relied onseparation of Little Cares (see Section 3.6). It proved to be a useful practical tool foroptimization and managing design complexity.
5.1. Video Coding with H.264 CABAC
CABAC, which stands for context adaptive binary arithmetic coding [Marpe et al.2003], is an entropy codec used for lossless video compression in H.264 standard [H.2642003]. It is also a performance bottleneck of H.264 decoding algorithm. As shown inFigure 14, the CABAC decoder receives a stream of encoded bits and decodes it into astream of bins. Bins are sent to debinarizers, where they are translated into video sym-bols, like motion vector differences or discrete cosine transform coefficients. CABACis an extension of binary arithmetic coding, which relies on context-based predictionsto adapt to the statistical structure of the decoded video stream and achieve bettercompression ratios. For every decoded bin, the CABAC algorithm predicts the mostprobable symbol (MPS), i.e., whether the current bin is more likely to be 0 or 1,and the probability of MPS. The probability is encoded with a 6 bit integer state,which corresponds to a value in the [0.5, 1.0] range as specified by H.264 [2003]. Theprediction varies at every cycle of decoding, based on the correctness of the previousprediction and the current context. The H.264 standard defines 449 different contextsbased on the type of video symbol that is currently under decode, and the position ofthe current bin within the video symbol. A complete prediction information (a 7-bit
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:16 M. Galceran-Oms et al.
Fig. 14. Simplified microarchitecture of the CABAC engine.
state containing one MPS bit and 6 bits of the probability state) is represented as aword inside the context memory. The memory contains 449 words and is implementedas a register file with one write and one read port. Debinarizers compute currentcontext identified by a number of context indices, which are then translated intoaddresses for the context memory.
The design of the CABAC decoder has several timing-critical paths including loopsthrough the address, write, and read logic of the context memory, two lookup tablesand the arithmetic decoding loop. Subsequent iterations of the decoding loop are inter-dependent as the value of the current bin determines the next context. Probability tocorrectly predict the next bin value is not always high. Therefore unrolling the loops tocompute multiple bins in one cycle requires significant area overhead without reliableincrease improvement in the performance. We explored a different avenue, based oncase analysis following the design optimization flow explained in the next sections.
5.2. Divide and Conquer with Little Cares
Separation of Littles Cares (see Section 3.6), is a central part of our approach to opti-mization of the CABAC decoder. As shown in Figure 15, we start with profiling of theavailable models (e.g. functional model, performance model, or RTL). We systemati-cally identify performance-critical computations (CC) and optimize them in isolationby ignoring all corner cases. The computations, which are not critical for performance(LC), are recycled to match the cycle time of the critical core. Finally, CC and LCbranches are merged in a variable-latency unit in a provably correct way based on theelastic controller with early evaluation. The process is iteratively applied to differentparts of the design and at different levels of granularity.
5.3. Elastic Redesign Flow
We created a design flow for converting existing RTL into elastic form and further opti-mizing it with transformations. In fact we found that most of the transformations canbe faithfully modeled and evaluated directly in the original RTL before its elasticiza-tion. To check how transformations influence timing, area, and power of the design,
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:17
Fig. 15. Divide and conquer strategy using Little Cares.
we run a commercial synthesis flow. Synthesis checks provide measurable feedbackto decide which transformations should be accepted and which should be considerednext. After the desired timing/area/power trade-off is achieved on the original RTLwe elasticize it by replacing registers with elastic buffers and adding an elastic con-troller.4 The complete elastic RTL is again synthesized and compared with metrics ofthe original design. Finally, the new RTL is validated.
The design flow is partly automated and follows the steps described in the following.
(1) Components of the original RTL are grouped into elastic islands. Elasticity is pre-served between the islands, but not within the islands. An automatic tool can takea description of groups provided by the user and generate a microarchitecturalgraph of the design. This step is not fully automated, as understanding of thedesign is critical for optimal partitioning. Based on performance analysis of theconstructed microarchitectural graph we also decide which of the multiplexors (orother nodes) should be implemented with early evaluation.
(2) The microarchitectural graph of the partitioned design is used to perform quickexperiments by applying the transformations described in Section 3. After perfor-mance analysis (done analytically or through simulation of the elastic controller)demonstrates sufficient progress, we reproduce the changes in RTL, such as insert-ing elastic buffers for pipelining or bubble insertion.
(3) Verilog RTL of the elastic controller is generated from the microarchitecturalgraph. The controller is merged with the transformed RTL, and the complete de-sign is used for validation and synthesis.
Along with the Verilog of the elastic controller, we also generate a NuSMV model[Cimatti et al. 2002] for the verification of safety and liveness properties. While allelastic controllers are formally verified to be correct, it is still necessary to performvalidation of the final RTL because formal verification abstracts away the reset phase;also (more importantly) manual changes that have been done to the original RTL canintroduce errors.
We developed a practical method for dynamic validation of elasticized RTL. Notethat testbenches available for the original synchronous block cannot be directly used
4In the case of the CABAC decoder, the elastic controller has very low overhead. The design can be parti-tioned into large islands of logic; each island contributes only a few latches to the controller, increasing totalarea and power by a small fraction. We expect the same to be true for other designs dominated by dataprocessing. See also Casu [2011] for a discussion on the area and power overhead of elastic controllers.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:18 M. Galceran-Oms et al.
with an elastic design due to the loss of synchronization. At the first step, we enforcestatic scheduling by removing all empty EBs. This is sufficient to eliminate all stallingcycles, because our design doesn’t contain VLUs (we always use Little Cares to intro-duce variable latency). The simplified RTL can be simulated with original testbenches,which is useful for initial debugging of manual RTL transformations. At the secondstep, we simulate elastic design on a fast clock. The elastic design is fast forwarded rel-ative to the original synchronous design, so that every large cycle of the synchronousdesign contains exactly n small cycles of the elastic design. At the edge of every largecycle we send new inputs to the elastic design and read back the results from the pre-vious iteration, which can be directly compared with their synchronous counterparts.During the cycle, we assert all output stop signals and disassert all input valid signals.We will always succeed in sending input tokens and receiving output tokens, providedthat the elastic design can completely process one batch of data in n or less small cy-cles. Note that such number n can always be found, because worst case performanceof an elastic design is bounded by its most stringent cycle [Julvez et al. 2010]. ForCABAC, we determined n empirically. We applied this validation method to root-causemanually introduced bugs and obtained a high degree of confidence by testing on longvideo streams from the original regression suite.
5.4. Statistics of the H.264 Video Stream
Profiling of H.264 functional model on several video streams revealed significant im-balance between frequencies of different types of video symbols. The video stream datais dominated by ResCoeff symbols (blocks of residual DCT coefficients) followed byMVD symbols (motion vector differences). These elements occupy more than 90% ofthe encoded stream. Typically, the fraction of MVD symbols is below 5%, except forstreams with heavy motion, for which it can go up to 30–40%. Video symbols of theother 9 types occur rarely and can be classified as Little Cares. According to the di-vide and conquer strategy described in Section 5.2, logic required for LC behaviors(including all debinarizers for symbols other than ResCoeff and MVD) is isolated anddisregarded during optimization.
5.5. Design Transformations
Improvement in CABAC decoder performance is a combined result of a series of de-sign transformations. We used multiple elastic (early evaluation, LC separation, andbubble insertion) and standard design transformations (register retiming, multiplexorretiming, bypassing, and precomputation). We discovered that sometimes a nonelas-tic transformation, although impossible to perform at the outset, might be enabled byan elastic transformation and vice versa. It is important to note that our optimizationscannot be repeated with the same results if the first step of identifying and isolating lit-tle cares is omitted. In this section we briefly mention some of the key transformations.
Synthesis of the CABAC decoder RTL highlighted multiple timing-critical paths toand from the context memory register file (see Figure 14). As a first transformation,we isolated the write logic of the register file by a single bypass, effectively removingit from the critical path. Contexts for different video symbols are located in differentregions of the context memory. Hence every debinarizer needs to access only a por-tion of the corresponding register file. Since profiling showed that only ResCoeff andMVD occur often, a large portion of the register file is owned by the LC debinarizers.Therefore, the initial LC separation of debinarizers can be taken one step further bypartitioning the context memory into LC and CC parts and subsequently isolating theLC part from the critical paths by inserting bubbles (empty EBs). Regions allocated forResCoeff and MVD can also be separated from each other and connected directly to the
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:19
Fig. 16. Area-performance trade-off of the original and the optimized decoders.
corresponding debinarizers without intermediate multiplexing logic. As a result of thispartitioning, delays in the second stage of the context memory read (R2 in Figure 14)were reduced, providing 10% reduction in the cycle time of the critical core.
The critical path that appeared after the register file partitioning, starts in thesecond stage of context memory read (R2), goes through the range table lookup andends at a register in the arithmetic decoding cycle. Logic in the arithmetic cycle iswell-balanced and optimized for delay, which makes it hard to improve. However, itis possible to remove the range table lookup from the critical path by precomputingthe memory address (produced at debinarizer output) one cycle ahead [Hassoun andEbeling 1996]. Then data can be read from memory one cycle earlier and range ta-ble lookup can be isolated from the arithmetic cycle by a retimed register. Potentialcorrectness issue, with data loss due to late memory-write can be solved by addinganother memory bypass or stalling reads for a cycle on the rare occurrence of datadependency of depth 2. Since context address depends on the value of the current bin,the precomputation can be done by reading two values from the CC portion of the reg-ister file (which requires an additional read port) and multiplexing the results afterthe second read stage when the actual bin value becomes available. This transforma-tion corresponds to multiplexor retiming through the read logic of the register file andreduces cycle time of the critical core by another 10%.
The renormalization stage of decoding [Marpe et al. 2003] shifts two 9-bit vectorsby a variable amount of bits. While the shift length can be in the range between 0 and7, profiling demonstrated that long shifts by 3–7 bits are required in less than 5% ofcases. This can be used for optimizing the shifting logic by deploying LC case splittingwith two versions of renormalizers: a fast shifter by 0–2 bits (CC portion) and a slowershifter by 3–7 bits (LC portion). By applying the technique described in Figure 7, theslow shifter can be isolated with a bubble (an empty EB) removing it from all criticalpaths. This transformation reduced the overall delay of the arithmetic cycle by 15%.
Performance-area trade-off curves for the original (synchronous) and the optimizedCABAC decoders are shown in Figure 16 with a cycle time shown along the X-axisand a total cell area along the Y-axis. The results are collected by sweeping differenttarget cycle times of the designs. Each point in the graph represents normalized cycletime and total cell area after a run of the synthesis tool using a 32 nm library. Areaand cycle time of 1.0 correspond to the minimal area and the cycle time of the originaldesign. Figure 16 demonstrates up to 40% improvement in cycle time with equal area.
After evaluating probabilities at all early evaluation multiplexors in the optimizedCABAC design, we ran a random simulation testbench, which produced a throughputestimate of 0.91, meaning that on the average, optimized CABAC outputs 91 data
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:20 M. Galceran-Oms et al.
Fig. 17. (a) Logical view of a shared unit; F is considered a variable-latency unit, (b) physical view of ashared unit; the scheduler of the shared unit grants access to one of the channels. (c) branching subgraphin a simple microarchitecture, (d) same subgraph after applying speculation.
tokens in 100 clock cycles. Together with cycle time improvement from Figure 16, itgives up to 35% improvement in effective cycle time with equal area, compared to theoriginal design (depending on the desired clock cycle point).
6. ADVANCED TRANSFORMATIONS
This section briefly discusses how some widely used microarchitectural techniquesmay be integrated in elastic systems. Resource sharing, speculation and multithread-ing are inherently elastic; they modify the latency of the computations and communi-cations and require a control unit that alters and stalls the data flow. Furthermore,they may be added in an elastic system by applying correct-by-construction transfor-mations. First, sharing and speculation are reviewed, and finally, as a further re-search topic, some possible strategies to implement multithreaded elastic pipelines areproposed.
6.1. Sharing of Functional Units
When a system includes early evaluation, the output of some computations is not al-ways required, and hence, they can be delayed with no performance penalty or evencanceled. As a result the actual utilization of some units can be way below 100%.
Different modules with the same behavior (e.g., two adders in the design) can bemerged into a single module, which is then shared by the input channels competingfor this resource. Sharing may provide a reduction of area and power, possibly withlow (or zero) performance degradation. Using a shared module is like using a modulefollowed by a buffer with unbounded but finite latency, since each data token may haveto wait for a certain number of cycles until it is allowed to use the shared module.
In Galceran-Oms et al. [2009], a possible implementation of module sharing in anelastic system is proposed. A local scheduler decides, at each clock cycle, which inputchannel can use the shared resource. The performance variation compared to usingunshared resources depends on whether the scheduler can distribute the load accu-rately among the different users. For better performance, the scheduler should takeinto account the elastic protocol: an invalid or a stalled channel cannot use the sharedunit even if selected. For correctness, a scheduler should be fair and avoid starva-tion: every token that reaches the shared module must eventually be allowed to use itunless it is canceled by an antitoken.
For example, Figure 17(a) shows two channels, each one using a unit F, which com-pute exactly the same function. If both Fs are shared in a single physical entity, thelogical view remains the same, although the latency of F becomes variable. Physically,a scheduler selects which channel can use F every clock cycle, as shown in Figure 17(b).
6.2. Speculative Execution
Sharing of functional units can be used to implement correct-by-construction specu-lative execution [Galceran-Oms et al. 2009]. Consider the example from Figure 17(c)showing a possible branch instruction in a microarchitectural graph. Each time a new
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:21
Fig. 18. Possible implementation for elastic multithreading support. Grey boxes are shared units.
instruction address must be generated, it is chosen from among the previous one plusa constant, the lower input in the multiplexors, or an address coming from the instruc-tion decoder (ID). The selection depends on the value generated by the node named BR,which may look at some register in the ALU or may perform some operation indicatedby the decoder stage.
Let us assume that ID and BR cannot be executed within one clock cycle becausetheir total delay is too large. In Figure 17(c), the only way to cut this path is to add thebubble between ID and BR drawn with a dotted line. However, BR, ID, and one of themultiplexors form a cycle, and hence, adding this bubble limits the throughput of thedesign to 0.5. Early evaluation cannot help increasing the throughput in this example.
Given a multiplexor with several inputs, it is possible to move a functional blockfrom the output of the multiplexor to its inputs using Shannon decomposition (viewedalso as a multiplexor retiming) [Soviani et al. 2006]. The example from Figure 17(c)can be transformed into the design in Figure 17(d) by using multiplexor retiming andregister retiming. In this second design, there is no critical cycle going through thecontrol of the multiplexor, and the only combinational path going through two units isthe one formed by BR going to the upper multiplexor and then to the adder. If this pathbecame critical, multiplexor retiming could also be applied to the upper multiplexor.
The performance gain of Figure 17(d) comes at a cost of duplicating the ID stage,with the resulting area overhead. At this point, speculation comes into play. The twoID nodes can be merged into a single one shared by the two inputs of the multiplexor.Hence, each clock cycle the scheduler of the shared ID module must perform a branchprediction and decide which of the tokens arriving to the ID stage should be grantedaccess to the unit so that the throughput is maximized. The scheduler can implementany state-of-the-art branch prediction algorithm, enhanced to understand the elasticprotocol.
Misprediction and correction are handled naturally by the handshake between theshared module and the multiplexor. If the multiplexor requires a channel, and thescheduler predicted the other one, the scheduler will see back-pressure coming fromthe predicted channel and will be able to correct the misprediction.
This speculation framework can also be used to efficiently integrate into elasticsystems, telescopic units and error correction and detection protocols [Galceran-Omset al. 2009]. Using speculation and antitoken insertion, precomputation [Hassoun andEbeling 1996] can also be added to the set of possible transformations.
6.3. Multithreading
Elastic systems implement in-order single-threaded pipelines. This section outlinessome possible research directions to extend elastic systems in order to support multi-threading.
There are few studies on automatic pipelining with multithreading. In Dimondet al. [2006], a multithreaded pipeline can be generated from a parameterized in-orderpipelining template. In Nurvitadhi et al. [2010], a more general multithreaded pipelin-ing approach is proposed, starting from an initial transactional specification.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:22 M. Galceran-Oms et al.
The advantage of elastic systems is that they can be modeled using marked graphsamenable to formal performance analysis and optimization. The natural extension inorder to support multithreading is to use colored Petri nets [Jensen 1997], where eachtoken is assigned a color (i.e., a thread). Token order must be preserved only for thetokens that belong to the same color. Current analysis and optimization methods ofelastic circuits should be extended to support multiple colors.
In the simplest implementation of a multithreaded elastic system, each threadwould own a copy of an automatically generated pipeline. Next, the independent copiescan be merged using the sharing transformation. Each clock cycle, the scheduler of ashared block would decide which thread can use it. Figure 18 shows a simple pipelinewith two threads. Each thread has its own register file, and the functional units F1and F2 are shared by the threads.
This approach is simple and allows total thread scheduling freedom. However, italso has a large area overhead, since each EB and the whole elastic controller is repli-cated once per thread. New transformations such as sharing of EBs may alleviate thisoverhead. A more efficient implementation can be obtained by adding a color identifi-cation to the handshake protocol of elastic controllers. All the control primitives shouldbe extended and verified accordingly. In particular, different versions of EBs are possi-ble depending on whether they allow reordering of tokens with different colors (betterperformance), or they behave strictly as FIFOs (simpler and smaller in area).
7. CONCLUSIONS
Elasticity offers a new set of transformations that can be systematically applied toimprove the performance of systems. These transformations are capable of modelingwell-known techniques for pipelining. Thus, the data and control logic structures as-sociated with high-throughput pipelines can be automatically generated and designframeworks for microarchitectural exploration can be conceived.
The use of early evaluation and antitokens is a novel paradigm in pipelining, whichcan contribute to new design methods based on the optimization of the most frequentoperations. We believe that automating the design of pipelines is an essential step toconfront the complexity of high-speed circuits.
REFERENCESBENINI, L., MICHELI, G. D., LIOY, A., MACII, E., ODASSO, G., AND PONCINO, M. 1999. Automatic syn-
thesis of large telescopic units based on near-minimum timed supersetting. IEEE Trans. Comput. 48, 8,769–779.
BLOCH, E. 1959. The engineering design of the stretch computer. In Proceedings of the IRE/AIEE/ACMEastern Joint Computer Conference. 48–58.
BUFISTOV, D., CORTADELLA, J., GALCERAN-OMS, M., JULVEZ, J., AND KISHINEVSKY, M. 2009. Retim-ing and recycling for elastic systems with early evaluation. In Proceedings of the ACM/IEEE DesignAutomation Conference. 288–291.
BUFISTOV, D., JULVEZ, J., AND CORTADELLA, J. 2008. Performance optimization of elastic systems usingbuffer resizing and buffer insertion. In Proceedings of the International Conference on Computer-AidedDesign (ICCAD). 442–448.
CARLONI, L. 2006. The role of back-pressure in implementing latency-insensitive systems. Electron. NotesTheoret. Comput. Sci. 146, 2.
CARLONI, L. AND SANGIOVANNI-VINCENTELLI, A. 2000. Performance analysis and optimization of latencyinsensitive systems. In Proceedings of the ACM/IEEE Design Automation Conference. 361–367.
CARLONI, L. AND SANGIOVANNI-VINCENTELLI, A. 2003. Combining retiming and recycling to optimize theperformance of Synchronous circuits. In Proceedings of the 16th Symposium on Integrated Circuits andSystem Design (SBCCI). 47–52.
CARLONI, L., MCMILLAN, K., SALDANHA, A., AND SANGIOVANNI-VINCENTELLI, A. 1999. A methodologyfor correct-by-construction latency insensitive design. In Proceedings of the International Conference onComputer-Aided Design (ICCAD). IEEE Press, 309–315.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

Microarchitectural Transformations Using Elasticity 18:23
CARMONA, J., CORTADELLA, J., KISHINEVSKY, M., AND TAUBIN, A. 2009. Elastic circuits. IEEE Trans.Comput.-Aid. Design 28, 10, 1437–1455.
CASU, M. 2011. Half-buffer retiming and token cages for synchronous elastic circuits. IET Comput. DigitalTechn. 5, 318–330.
CASU, M. AND MACCHIARULO, L. 2007. Adaptive latency-insensitive protocols. IEEE Des. Test Comput. 24,5, 442–452.
CIMATTI, A., CLARKE, E., GIUNCHIGLIA, E., GIUNCHIGLIA, F., PISTORE, M., ROVERI, M., SEBASTIANI,R., AND TACCHELLA, A. 2002. NuSMV Version 2: An OpenSource tool for symbolic model checking. InProceedings of the International Workshop on Computer Aided Verification. Lecture Notes in ComputerScience Series, vol. 2404, Springer.
CORTADELLA, J. AND KISHINEVSKY, M. 2007. Synchronous elastic circuits with early evaluation and tokencounterflow. In Proceedings of the ACM/IEEE Design Automation Conference. 416–419.
CORTADELLA, J., KISHINEVSKY, M., AND GRUNDMANN, B. 2006a. Synthesis of synchronous elastic archi-tectures. In Proceedings of the ACM/IEEE Design Automation Conference. 657–662.
CORTADELLA, J., KONDRATYEV, A., LAVAGNO, L., AND SOTIRIOU, C. 2006b. Desynchronization: Synthesisof asynchronous circuits from synchronous specifications. IEEE Trans. Comput.-Aid. Design 25, 10,1904–1921.
DIMOND, R., MENCER, O., AND LUK, W. 2006. Application-specific customisation of multi-threaded softprocessors. IEE Proc. Comput. Digit. Techniques 153, 173–180.
GALCERAN-OMS, M., CORTADELLA, J., AND KISHINEVSKY, M. 2009. Speculation in elastic systems. InProceedings of the ACM/IEEE Design Automation Conference. 292–295.
GALCERAN-OMS, M., CORTADELLA, J., KISHINEVSKY, M., AND BUFISTOV, D. 2010. Automatic microarchi-tectural pipelining. In Proceedings of the Design, Automation and Test in Europe (DATE). 961–964.
INTERNATIONAL TELECOMMUNICATION UNION. 2003. Recommendation ITU-T H.264: Advanced VideoCoding for Generic Audiovisual Services. ITUT.
HASSOUN, S. AND EBELING, C. 1996. Architectural retiming: Pipelining latency-constrained circuits. InProceedings of the ACM/IEEE Design Automation Conference. 708–713.
HENNESSY, J. AND PATTERSON, D. 1990. Computer Architecture: A Quantitative Approach. Morgan Kauf-mann Publisher Inc.
JACOBSON, H. M., KUDVA, P. N., BOSE, P., COOK, P. W., SCHUSTER, S. E., MERCER, E. G., ANDMYERS, C. J. 2002. Synchronous interlocked pipelines. In Proceedings of the International Symposiumon Advanced Research in Asynchronous Circuits and Systems. 3–12.
JENSEN, K. 1997. Coloured Petri Nets: Basic Concepts, Analysis Methods and Practical Use. Springer-Verlag.JULVEZ, J., CORTADELLA, J., AND KISHINEVSKY, M. 2010. On the performance evaluation of multi-guarded
marked graphs with single-server semantics. Discrete Event Dynamic Syst. 20, 3, 377–407.KAM, T., KISHINEVSKY, M., CORTADELLA, J., AND GALCERAN-OMS, M. 2008. Correct-by-construction mi-
croarchitectural pipelining. In Proceedings of the International Conference on Computer-Aided Design(ICCAD). 434–441.
KISHINEVSKY, M., KONDRATYEV, A., TAUBIN, A., AND VARSHAVSKY, V. 1994. Concurrent Hardware: TheTheory and Practice of Self-Timed Design. John Wiley & Sons.
KOGGE, P. M. 1981. The Architecture of Pipelined Computers. McGraw-Hill.KRSTIC, S., CORTADELLA, J., KISHINEVSKY, M., AND O’LEARY, J. 2006. Synchronous elastic networks. In
Proceedings of the International Conference on Formal Methods in Computer-Aided Design (FMCAD).LEISERSON, C. E. AND SAXE, J. B. 1991. Retiming synchronous circuitry. Algorithmica 6, 1, 5–35.LU, R. AND KOH, C.-K. 2003. Performance optimization of latency insensitive systems through buffer queue
sizing of communication channels. In Proceedings of the International Conference on Computer-AidedDesign (ICCAD). 227–231.
MANOHAR, R. AND MARTIN, A. 1998. Slack elasticity in concurrent computing. In Mathematics of ProgramConstruction. Springer, 272–285.
MARPE, D., SCHWARZ, H., AND WIEGAND, T. 2003. Context-based adaptive binary arithmetic coding in theH.264/AVC video compression standard. IEEE Trans. Circuits Syst. Video Technol. 13, 7, 620–636.
NURVITADHI, E., HOE, J., LU, S., AND KAM, T. 2010. Automatic multithreaded pipeline synthesis fromtransactional datapath specifications. In Proceedings of the ACM/IEEE Design Automation Conference.ACM, 314–319.
REESE, R., THORNTON, M., TRAVER, C., AND HEMMENDINGER, D. 2005. Early evaluation for performanceenhancement in phased logic. IEEE Trans. Comput.-Aid. Design 24, 4, 532–550.
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.

18:24 M. Galceran-Oms et al.
SOVIANI, C., TARDIEU, O., AND EDWARDS, S. 2006. Optimizing sequential cycles through Shannon decom-position and retiming. In Proceedings of the Design, Automation and Test in Europe (DATE). EuropeanDesign and Automation Association, 1085–1090.
SU, Y.-S., WANG, D.-C., CHANG, S.-C., AND MAREK-SADOWSKA, M. 2007. An efficient mechanism for per-formance Optimization of variable-latency designs. In Proceedings of the ACM/IEEE Design AutomationConference. 976–981.
SUTHERLAND, I. E. 1989. Micropipelines. Comm. ACM 32, 6, 720–738.VIJAYARAGHAVAN, M. AND ARVIND. 2009. Bounded dataflow networks and latency-insensitive circuits.
In Proceedings of the 7th International Conference on Formal Methods and Models for Codesign(MEMOCODE).
WILLIAMS, T. 1994. Performance of iterative computation in self-timed rings. J. VLSI Signal Proc. 7, 1,17–31.
Received July 2011; revised August 2011; accepted September 2011
ACM Journal on Emerging Technologies in Computing Systems, Vol. 7, No. 4, Article 18, Publication date: December 2011.