Embed Size (px)
Citation preview

MIC-GPU: High-Performance Computingfor Medical Imagingon Programmable Graphics
Hardware (GPUs)
Parallelism in Medical Imaging
Stony Brook University
Computer Science
Stony Brook, NY
Klaus Mueller, Ziyi Zheng, Eric Papenhausen
SPIE Medical Imaging 2010SPIE Medical Imaging 2011 MIC-GPU 2
Transmission CT: Data Generation
X-ray source
detector
attenuating object
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 3
CT Reconstruction
High-dose CT reconstruction usually uses FDK algorithm
• backprojection of filtered views
Low-dose CT reconstruction pipeline typically uses iterative 3D reconstruction with regularization
• projection of volume into set’s views
• correction factor computation
• backprojection of correction factors (views)
• regularization
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 4
Filtered BackprojectionReconstruction
Projection filteringFFT
multiply by ramp inverse FFT
pre-weighting BackprojectionsPost-weighting
X-ray source
detectorattenuating object

SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 5
Iterative Reconstruction
Projections
Initialization
Correction factor computations
BackprojectionsRegularization
X-ray source
detectorattenuating object
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 6
Kernel-Centric Decomposition
IterativeFBP
P
C
B
R
B
P Projection
B Backprojection
C Correction
R Regularizationkernel
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 7
Kernel-Centric Decomposition
We can consider each of these steps to be a SIMT kernel
Iterative 3D reconstruction with regularization:
• backprojection of volume into set’s views projection kernel
• correction factor computation correction factor kernel
• backprojection of correction factors backprojection kernel
• regularization regularization kernel
vector operations
projector with interpolation
image processing filters
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 8
Kernel-Centric Decomposition
IterativeFBP
P
C
B
R
B
P Projection
B Backprojection
C Correction
R Regularizationcompute intensive kernel

SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 9
Kernel Scheduling
SIMT can only execute one kernel at a time
• this prohibits kernel overlap, even if mathematically correct
• we may merge kernels if targets are identical
this favors load balancing and the reduction of passes
First decompose the reconstruction pipeline into components
• develop an optimized kernel for each component
• overlap (=hide) the loading of data (if needed) with execution of a prior kernel (or within kernel)
• optimize what platform to run the computations (CPU, GPU), but then consider transfer of data
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 10
Terminology
We shall discuss all material in terms of 3D reconstruction
• the reduction to 2D slice reconstruction is straightforward
Pixels: the basis elements (point samples) of the projection image (the photon measurements)
Voxels: the basis elements (point samples) of the reconstruction volume (the attenuation densities or the tracer photon emissions)
reconstructed volume
interpolation (nearest neighbor, bilinear)
voxelpixel
projection operator
projection image
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 11
1
k
i l il
lij
i ilk k lj j
ij
i
p v w
ww
v vw
λ+
−
= +
Projection (into pixel i)
Normalization
at pixel i
Normalization at voxel j
Backprojection
(into voxel j)
Scanned pixel
New (k+1) and previous (k)
values of voxel j
Iterative CT Example: SART/SIRT
Correction value
SPIE Medical Imaging 2010 MIC-GPU 12
Kernel-Centric Decomposition
( ) ( )3 11
0 0
: :
MN
i j ij j i ij
j i
P p v w B v p wϕ −−
= =
= ⋅ = ⋅
3
3
1
0
1
0
( )( )
( )
( )
i
i
N
i l il
l
ijNp P
il
l
j j j
ij
p P
p v w
w
S P Vw BP I
v v vw B I
ϕ
ϕ
λ
λ
−
=
−∈
=
∈
− ⋅
− = + = +
SART
S: scanner projections
I: identity projection/volume
_
i set i set
j i ij fdk
p P p P
v p w B S∈ ∈
= = ⋅ FBP

SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 13
Backprojection: Options
• voxel-driven: sample in projection space
• one write per thread
source
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 14
Backprojection: Options
• voxel-driven: sample in projection space
• one write per thread
source source
• pixel-driven, sample in volume space
• multiple writes per thread (scatter)
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
CUDA Memory – Backprojection
MIC-GPU 15
Global Memory Texture Memory
Access Read/Write Read only
Cached No Yes
Subject to coalescing Yes No
Interpolation No support Hardwired
Dimension arbitrary 1D, 2D, 3D (supported
after CUDA 2.0)
volume projections
SPIE Medical Imaging 2010
CUDA Configuration: 2D
thread
block
Y
XZ
MIC-GPU 16
SPIE Medical Imaging 2010 MIC-GPU 17
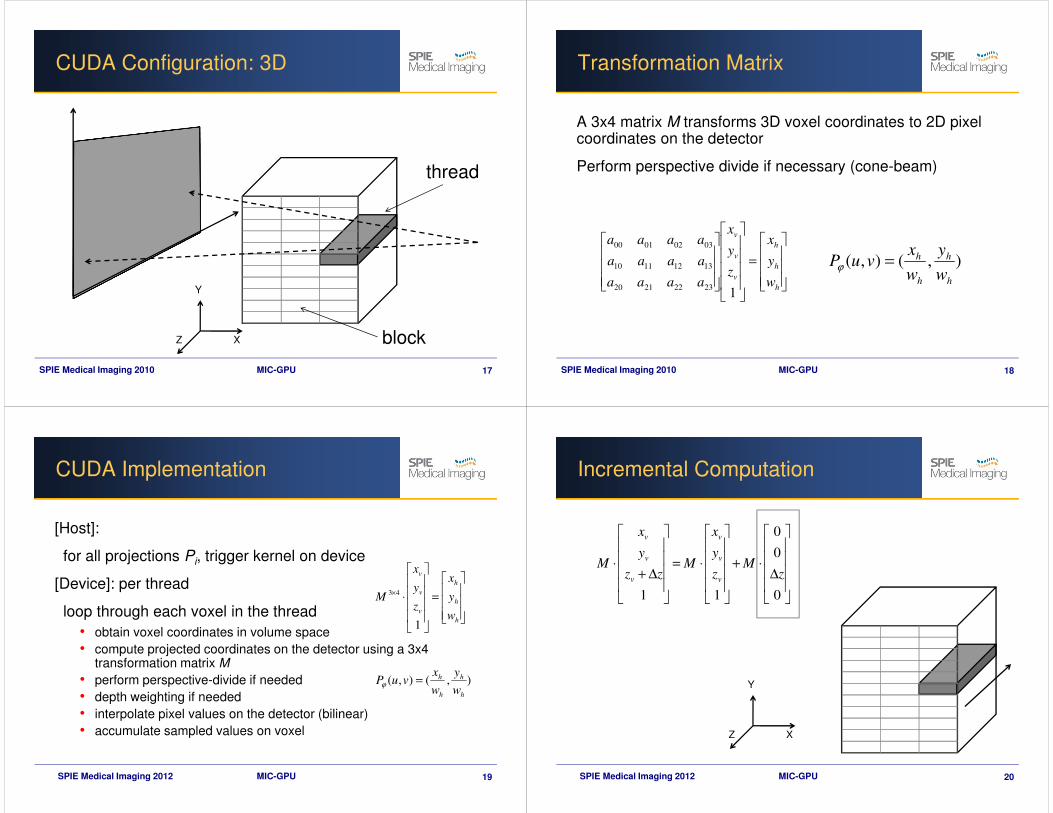
CUDA Configuration: 3D
thread
block
Y
XZ
SPIE Medical Imaging 2010 MIC-GPU 18
Transformation Matrix
A 3x4 matrix M transforms 3D voxel coordinates to 2D pixel coordinates on the detector
Perform perspective divide if necessary (cone-beam)
=
h
h
h
v
v
v
w
y
x
z
y
x
aaaa
aaaa
aaaa
123222120
13121110
03020100
),(),(h
h
h
h
w
y
w
xvuP =ϕ
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 19
CUDA Implementation
[Host]:
for all projections Pi, trigger kernel on device
[Device]: per thread
loop through each voxel in the thread
• obtain voxel coordinates in volume space
• compute projected coordinates on the detector using a 3x4 transformation matrix M
• perform perspective-divide if needed
• depth weighting if needed
• interpolate pixel values on the detector (bilinear)
• accumulate sampled values on voxel
=
⋅×
h
h
h
v
v
v
w
y
x
z
y
x
M
1
43
),(),(h
h
h
h
w
y
w
xvuP =ϕ
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Incremental Computation
MIC-GPU 20
∆⋅+
⋅=
∆+⋅
0
0
0
11
zM
z
y
x
Mzz
y
x
Mv
v
v
v
v
v
Y
XZ

SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 21
Example: Feldkamp Cone-Beam Reconstruction
360 projections (10242, general position), 5123 volume
CPU
tumor profiles
GPU
performance in seconds
135
80
20
40
60
80
100
120
140
160
CPU GPU
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 22
Expressed in Projections/Sec.
360 projections, 5123 volume
Original GPU-recon
performance in projections/s
2.6
45
0
5
10
15
20
25
30
35
40
45
50
CPU GPU
SPIE Medical Imaging 2010SPIE Medical Imaging 2010 MIC-GPU 23
FDK: Medical Datasets
Head Toes Abdominal Aorta
Orig
ina
lR
eco
nstru
cte
d
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 24
Forward Projection
Sample in volume space (pixel-driven / ray-driven)
source
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
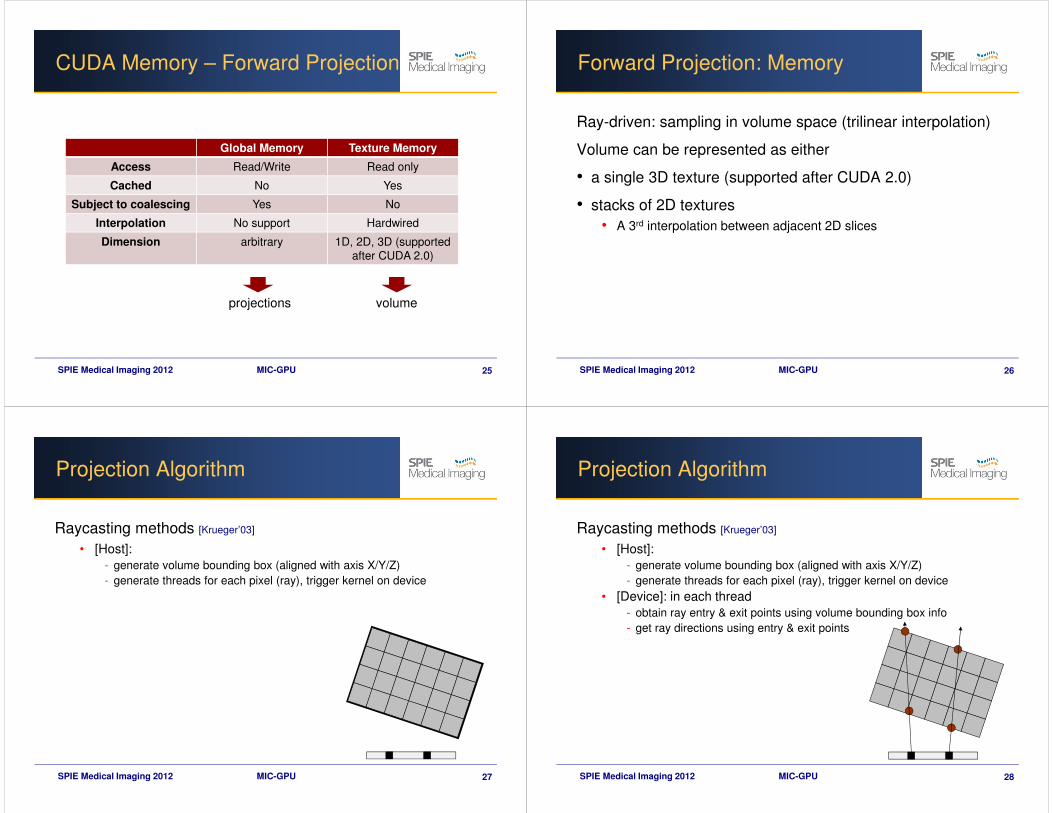
CUDA Memory – Forward Projection
MIC-GPU 25
Global Memory Texture Memory
Access Read/Write Read only
Cached No Yes
Subject to coalescing Yes No
Interpolation No support Hardwired
Dimension arbitrary 1D, 2D, 3D (supported
after CUDA 2.0)
projections volume
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Forward Projection: Memory
Ray-driven: sampling in volume space (trilinear interpolation)
Volume can be represented as either
• a single 3D texture (supported after CUDA 2.0)
• stacks of 2D textures
• A 3rd interpolation between adjacent 2D slices
MIC-GPU 26
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 27
Projection Algorithm
Raycasting methods [Krueger’03]
• [Host]:
- generate volume bounding box (aligned with axis X/Y/Z)
- generate threads for each pixel (ray), trigger kernel on device
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 28
Projection Algorithm
Raycasting methods [Krueger’03]
• [Host]:
- generate volume bounding box (aligned with axis X/Y/Z)
- generate threads for each pixel (ray), trigger kernel on device
• [Device]: in each thread
- obtain ray entry & exit points using volume bounding box info
- get ray directions using entry & exit points

SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 29
Projection Algorithm
Raycasting methods [Krueger’03]
• [Host]:
- generate volume bounding box (aligned with axis X/Y/Z)
- generate threads for each pixel (ray), trigger kernel on device
• [Device]: in each thread
- obtain ray entry & exit points using volume bounding box info
- get ray directions using entry & exit points
- cast rays, inside the loop:
• sample in volume space
• accumulate values
• step forward equidistantly
SPIE Medical Imaging 2010SPIE Medical Imaging 2012 MIC-GPU 30
Projection Accuracy
Volume
space
Detector
slice-interpolated grid line Siddon RBF line area Siddon splat
Investigated various schemes in terms of accuracy:
It was shown that the convenient grid-interpolated (trilinear) scheme is qualitatively competitive to the more involved ones listed here.
• see Xu / Mueller, "A comparative study of popular interpolation and integration methods for use in computed tomography," IEEE 2006 International Symposium on Biomedical Imaging (ISBI '06)
SPIE Medical Imaging 2010 MIC-GPU 31
Example: Iterative Algorithms
Kernel selection depends on algorithms
Projection/Backprojection
Correction
• pixel-wise operation
• subtraction
Regularization
• TVM or
• bilateral filter or
• non-local mean filter
Sync
Projection
Correction
Backprojection
Regularization
Sync
SPIE Medical Imaging 2010
Sync
MIC-GPU 32
forward projection(pixel-driven)
global memory (r/w) texture memory (r)

SPIE Medical Imaging 2010
Sync
MIC-GPU 33
forward projection(pixel-driven)
global memory (r/w) texture memory (r)
backprojection(voxel-driven)
SPIE Medical Imaging 2010
Sync
MIC-GPU 34
forward projection(pixel-driven)
global memory (r/w) texture memory (r)
backprojection(voxel-driven)
add
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Regularization
Overall goal: make the reconstruction conform to expectations
• reconstruction is not noisy
• reconstruction has sharp edges
Various techniques
• Total Variation Minimization (TVM)
• bilateral filter (BLF)
• non-local means filter (NLM)
TVM
• motivated by compressive sensing (sparseness) theory
BLF, NLM
• popular in image processing and computer vision
MIC-GPU 35 SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Motivation
Want to remove low-dose CT artifacts:
20 projections SNR=10
CT with low dose data high-dose data CT

SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Motivation
What we want to achieve – ideally:
20 projections SNR=10
CT + regularization high-dose CT
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Total Variation Minimization (TVM)
Goal is to minimize the overall energy:
Minimize using the steepest descent method
• for each voxel vi do iteratively:
MIC-GPU 38
2
0
1| | ( )
2TV
E I I I dxdyλΩ
= ∇ + −
variation fidelity
1 0( )k
k k ki
i i i ik
i
vv v div v v
vβ λ+
∇ = − ⋅ + − ∇
original voxel value
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Relaxation Parameters (TVM)
Gradient step size β:
• << 1, usually 0.2
Fidelity term λ:
• initially set to 0
• next iterations:
• assuming:
MIC-GPU 39
02
1( )( )
| | | |
Idiv I I dxdy
Iλ
σ Ω
∇= −
Ω ∇
2 2
0
1min | | subject to ( )
| |I
I dxdy I I dxdy σΩ Ω
∇ − =Ω
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Non-linear Neighborhood Filters
40
2 5 6
4 2 7
5 2 6
Input imageWindow
13
Output image
ComputationBased on
Neighborhood values
• Generalization of discrete convolution

SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Bilateral Filter (BLF)
• Edge-preserving non-linear filter:
41
original edge bilateral filter smoothed edge
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Bilateral Filter (BLF)
• Edge-preserving non-linear filter:
42
( ( ) ( )
(
( )( ) )
( )
)(( )) ) (
s f f xc
s f
f d
u
c dx
x
x f
xξξ
ξ ξ
ξ
ξ
ξ∞ ∞
−∞ −∞∞ ∞
−∞ −∞
−
=
−
−
−
spatial closeness value closeness (similarity)
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Non-Local Means Filter
Replaces a pixel at x with the mean of the pixels y with similar Gaussian-weighted neighborhood:
(search) window W
Gaussian-weighted neighborhood
patches with pixels y
(only highly-weighted shown)
patch with updated pixel x
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Non-Local Means Filter
Replaces a pixel at x with the mean of the pixels y with similar Gaussian-weighted neighborhood:
x, y, t: spatial variables W: window centered at x
N: neighborhood centered at x, y Ga: Gaussian kernel
h: filtering weight controls the influence of dissimilar pixels
2
2
2
2
( ) ( ) ( )
( ) ( ) ( )
( )
( )
at N
at N
G t im g x t im g y t
hy W
G t im g x t im g y t
hy W
e im g y
N LM x
e
∈
∈
+ − +−
∈
+ − +−
∈
=

SPIE Medical Imaging 2010SPIE Medical Imaging 2012
NLM vs. TVM: Quality
NLM is as good (often better) than TVM
input TVM, =40 NLM, h=15
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
NLM vs. TVM: Speed
NLM is typically faster than TVM because it is non-iterative
• all parameters were manually set to yield similar visual quality
• CUDA GPU implementations (NVIDIA GTX 480)
• in seconds:
MIC-GPU 46
Image size TV NLM
2562 57 12
5122 80 42
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Bilateral vs. NLM
Faster than NLM, but quality is lower
47
NLM
h = 17
rp = 5 rw = 8
Bilateral
x = y = 30
r = 19 rw = 8
SPIE Medical Imaging 2010SPIE Medical Imaging 2012
Course Schedule
MIC-GPU 48
1:30 – 1:45: Introduction (Klaus)
1:45 – 2:00: Parallel programming primer (Klaus)
2:00 – 2:15: GPU hardware (Ziyi)
2:15 – 3:00: CUDA API, threads (Ziyi)
Coffee Break
3:30 – 4:00: CUDA memory optimization (Eric)
4:00 – 4:15: CUDA programming environment (Ziyi)
4:15 – 4:45: Parallelism in CT reconstruction (Klaus)
4:45 – 5:25: CT reconstruction examples (Eric)
5:25 – 5:30: Closing remarks (Klaus)