Embed Size (px)
Citation preview

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Methods for analysis and control of dynamical systemsLecture 2: Modelling of dynamical systems
O. Sename1
1Gipsa-lab, CNRS-INPG, [email protected]
www.gipsa-lab.fr/∼o.sename
2nd February 2014

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Outline
Introduction
Methods for system modelling
Physical examplesHydraulic tanksSatellite attitude control modelThe DVD playerThe suspension systemThe wind tunnelEnergy and comfort management in intelligent building
State space representationPhysical examplesLinearisationConversion to transfer function

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
References
Some interesting books:I G. Franklin, J. Powell, A. Emami-Naeini, Feedback Control of
Dynamic Systems, Prentice Hall, 2005I R.C. Dorf and R.H. Bishop, Modern Control Systems, Prentice
Hall, USA, 2005.I G.C. Goodwin, S.F. Graebe, and M.E. Salgado, Control System
Design, Prentice Hall, New Jersey, 2001.I K.J. Astrom and B. Wittenmark, Computer-Controlled Systems,
Information and systems sciences series. Prentice Hall, NewJersey, 3rd edition, 1997.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Types of models
I Finite state models (Petri nets, Grafcet) of logical systems:discrete-event systems
I Graph models : Bond graph. Allow a physical description in aunique way whatever the physical domain is.
I Experimental models : allow to reproduce an input-output behavior.I State models: A mathematical description of the system in terms
of a minimum set of variables xi (t), i = 1, . . . ,n, together withknowledge of those variables at an initial time t0 and the systeminputs for time t ≥ t0, are sufficient to predict the future systemstate and outputs for all time t ≥ t0.
Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Different issues for modelling (1)
Identification based method- Black box modelsI System excitations using step inputs, sinusoïdal signals, or PRBS
(Pseudo Random Binary Signal)I Determination of a transfer function reproducing the input/ouput
system behaviorI Method : direct identification (Strejc) or by optimization.I Objective: determination of the set of model parameters.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Different issues for modelling (2)
Knowledge-based method - White box modelsI Represent the system behavior using differential and/or algebraic
equations, based on physical knowledge.I Formulate a nonlinear state-space model, i.e. a matrix differential
equation of order 1.I Determine the steady-state operating point about which to
linearize.I Introduce deviation variables and linearize the model.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Why knowledge-based method are of interest?
I dynamical systems where physical equations can be derived :electrical engineering, mechanical engineering, aerospaceengineering, microsystems, process plants ....
I include physical parameters: easy to use when parameters arechanged for design
I State variables have physical meaning.I Allow for including non linearities (state constraints )I Easy to extend to Multi-Input Multi-Output (MIMO) systemsI Advanced control design methods are based on state space
equations (reliable numerical optimisation tools)

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Height control of a single Tank
Consider a water tank of area S, height H, feeded by an input flow Qe,with an output flow Qs
Figure: Bac.
Usually the flow is considered to be proportional to the square root ofthe pressure difference, then
Qs = kt√
H
andS
dHdt
= Qe−Qs = Qe−kt√
H
Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
A satellite attitude control model
A simple model for a one-axis system is :
Iθ = MD + Fcd
where is the inertia, θ the angular position, MD a small disturbancemoment on the satellite, Fc the control force that comes from thereaction jets, d the distance from the jet to the center of gravity.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
the DVD player
Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
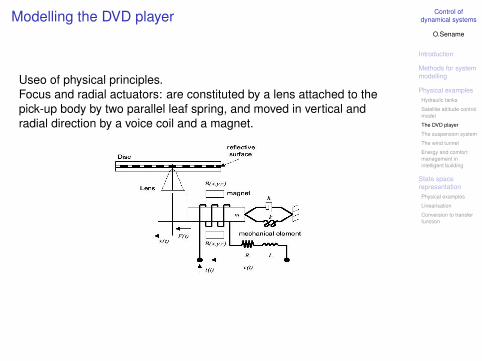
Modelling the DVD player
Useo of physical principles.Focus and radial actuators: are constituted by a lens attached to thepick-up body by two parallel leaf spring, and moved in vertical andradial direction by a voice coil and a magnet.
Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Modelling the DVD player (2)
I Actuator : voltage v(t). Controls the pick-up voice coilI Output signal:laser spot position x(t)
Electrical part: the voltage v(t) applied to the R-L circuit makes flow init a current i(t):
L∂ i(t)
∂ t+ Ri(t) = v(t)−Ke
∂x(t)∂ t
(1)
Magnetic part:f (t) = Ke i(t) (2)
where Ke is the back-emf constant,Mechanical part: The force f (t) [N] acts on the objective lens mass M[Kg], making the actuator moves:
M∂ 2x(t)
∂ t2 + D∂x(t)
∂ t+ kx(t) = f (t) (3)

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Data of the DVD player 1
Table: Values of the physical parameters of Pick-up 1 (for focus and trackingactuators), from Pioneer.
Name Description Value Focus Value TrackingR DC resistance of coil 5.4±1.1 Ω 5.9±1.2 ΩL Inductance of coil 15±6 µH 9±6 µHM Moving mass 0.7 g 0.7 g
SDC DC Sensitivity 2.69 mm/V 0.63 mm/Vf0 Resonance frequency 30±7 Hz 47±7 Hz
QdB Resonance peak ≤ 15 dB ≤ 15 dB

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Data of the DVD player 2
Table: Values of the physical parameters of Pick-up 2 (for focus and trackingactuators), from Sanyo
Name Description Value Focus Value TrackingR DC resistance of coil 6.5±1 Ω 6.5±1 ΩL Inductance of coil 25±6 µH 18±6 µHM Moving mass 0.33 g 0.33 g
SDC DC Sensitivity 0.94 mm/V 0.27 mm/Vf0 Resonance frequency 52±7 Hz 52±7 Hz
QdB Resonance peak ≤ 20 dB ≤ 20 dB
Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Calculation of the parameters
The elastic constant k ([N/m]), the dumping factor D ([Ns/m]), and theelectro-magnetic constant Ke ([Wb/m]) are :
wn = 2πf0k = M×w2
n
D = wn×M×
√2(
1−√
1− 1Q2
)Ke = kRSDC
where Q denotes the absolute value of the actuator amplitude peak, atthe resonance frequency f0, SDC ([mm/V ]) is the value of the actuatorDC sensitivity , M ([kg]) is the objective lens mass R ([Ω]) and L ([H])the resistance and inductance of the coil.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Calculation of the transfer function
Electrical part:
I(s) =1
Ls + R[V (s)−KesX (s)] (4)
Magnetic part:F (s) = KeI(s) (5)
Mechanical part:X (s)
F (s)=
1Ms2 + Ds + k
(6)
Combining these equations , it leads
H(s) =X (s)
V (s)=
KeML
s3 +
(RL + D
M
)s2 +
(DRML + k
M + K 2e
ML
)s + kR
ML
(7)
Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
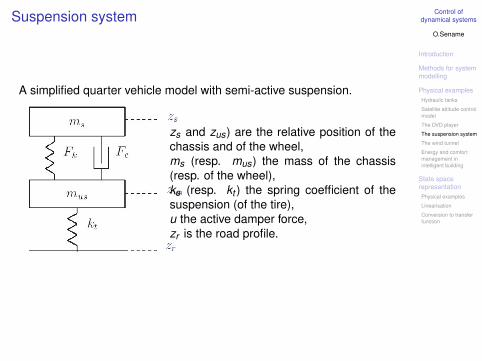
Suspension system
A simplified quarter vehicle model with semi-active suspension.
zs and zus) are the relative position of thechassis and of the wheel,ms (resp. mus) the mass of the chassis(resp. of the wheel),ks (resp. kt ) the spring coefficient of thesuspension (of the tire),u the active damper force,zr is the road profile.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Suspension system (2)
The mechanical equations are:ms zs = −Fk (zdef )−Fc(zdef )
mus zus = Fk (zdef ) + Fc(zdef )−kt (zus−zr )zdef ∈
[zdef zdef
] (8)
where Fk (zdef ) and Fc(zdef ) (with zdef = zs−zus and zdef = zs− zus)are the nonlinear forces provided by the spring and damperrespectively.
−0.1 −0.05 0 0.05−4000
−3000
−2000
−1000
0
1000
2000
3000
4000Stifness coefficient
zdef
[m]
F k [N]
−1 −0.5 0 0.5 1−1000
−500
0
500
1000
1500Damping coefficient
z’def
[m/s]
F c [N]
Figure: Nonlinear forces provided by the Spring (left) and the Damper (right).

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Suspension system (3)
The involved model parameters have been identified on a "RenaultMégane Coupé" car and are given below.
Symbol Value Descriptionms 315kg sprung massmus 37.5kg unsprung massk 29500N/m suspension linearized stiffnessc 1500N/m/s suspension linearized dampingkp 210000N/m tire stiffness[zdef ,zdef ] [−8,6]cm suspension’s deflection limits
Table: Parameters model of a "Renault Mégane Coupé".

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
A wind tunnel
Objective: feedback control of the Mach number in a wind tunnel(NASA)In steady-state operating conditions (some constant fan speed, liquidnitrogen injection rate, and gaseous-nitrogen vent rate), the dynamicresponse of the Mach number perturbations δM to small perturbationsin the guide vane angle actuator δθA
τδM(t) + δM(t) = kδθ(t−h)
δ θ(t) + 2ξ ωδ θ(t) + ω2δθ(t) = ω
2δθA(t)
δθ(t) is the guide vane angle.Time-delay h : transportation time between the guide vanes of the fanand the test section of the tunnelh varies as a function of the temperature and is such that0.288≤ h ≥ 0.455s.
Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
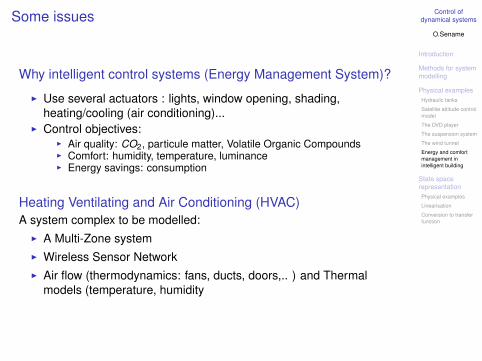
Some issues
Why intelligent control systems (Energy Management System)?
I Use several actuators : lights, window opening, shading,heating/cooling (air conditioning)...
I Control objectives:I Air quality: CO2, particule matter, Volatile Organic CompoundsI Comfort: humidity, temperature, luminanceI Energy savings: consumption
Heating Ventilating and Air Conditioning (HVAC)A system complex to be modelled:
I A Multi-Zone systemI Wireless Sensor NetworkI Air flow (thermodynamics: fans, ducts, doors,.. ) and Thermal
models (temperature, humidity

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Room temperature
L’équation fondamentale représentant la variation de température depart et d’autres d’un mur est la suivante:
ρ.cv .VdTdt
=λwall∆x
.A.(Tout −T ) + Qsources (9)
où
T (K ) température de la pièceTout (K ) température extérieure
cv (J/kgK ) capacité thermique de l’air à volume constant = 719cp (J/kgK ) capacité thermique de l’air à pression constante = 1010
V (m3) Volume de la pièceρ (kg/m3) densité de l’air = 1.169
∆x (m) épaisseurA (m2) Surface du mur
Qsources Sources (extérieures + contrôle)
Les coefficients de conductivité λwall dépendent des matériauxcomposant les murs, et sont donnés :

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
General dynamical system
Many dynamical systems can be represented by Ordinary DifferentialEquations (ODE) as
x(t) = f ((x(t),u(t), t), x(0) = x0
y(t) = g((x(t),u(t), t)(10)
where f and g are non linear functions.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Definition of state space representations
A continuous-time LINEAR state space system is given as :x(t) = Ax(t) + Bu(t), x(0) = x0
y(t) = Cx(t) + Du(t)(11)
I x(t) ∈ Rn is the system state (vector of state variables),I u(t) ∈ Rm the control inputI y(t) ∈ Rp the measured outputI A, B, C and D are real matrices of appropriate dimensionsI x0 is the initial condition.
n is the order of the state space representation.Matlab : ss(A,B,C,D) creates a SS object SYSrepresenting a continuous-time state-space model

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Height control of a single Tank
In steady state : Qe = Q0, H = H0Consider the variations qe,qs,h around the steady state as:Qe = Q0 + qe; Qs = Q0 + qs; H = H0 + h.This leads to the equation :
Sdhdt
= qe−kt (√
H0 + h−√
H0)
Using the first order approximation (1 + x)α = 1 + αx , it leads
Sdhdt
= qeh
Denoting the state variable x = h, the control input u = qe, the outputy = h, we get
x = Ax + Bu (12)
y = Cx (13)
with A =− kt2√
H0, B = 1
S and C = 1.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Some exampes
Suspension systemChoose the state variables and give the state space representation ofthe system, with input zr (not controlled) and output zs−zus or zs
SatelliteChoose the state variables and give the state space representation ofthe system, with controlled input Fc , disturbance input MD and output θ .

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
A wind tunnel
In steady-state operating conditions (fan speed, liquid nitrogen injectionrate and gaseous-nitrogen vent rate) the dynamic response of the Machnumber is given by the following system:
x(t) =
−0.5091 0 00 0 10 −36 −9.6
x(t)
+
0 −0.005956 00 0 00 0 0
x(t−h)
+
00
36
u(t) +
001
w(t)
y(t) =[
1 0 0]x(t) + w(t)
z(t) =[
1 1 1]x(t)
x(t) = φ(t); t ∈ [−h,0]
where h = 0.33sec., x1 is the Mach number, x2 is the guide vane angleand x3 = x2.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Example : Wind turbine
An complete model (ADAMS) includes 193 DOFs.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Some important issues
I A complete ADAMS model includes 193 DOFs to represent fullyflexible tower, drive-train, and blade components⇒ simulationmodel
I Different operating conditions according to the wind speedI Control objectives: maximize power , enhance damping in the first
drive train torsion mode, design a smooth transition differentmodes
I A Generator torque controller to enhance drive train torsiondamping in Regions 2 and 3
I The control model is obtained by linearisation of a non linearelectro-mechanical model:
x(t) = Ax(t) + Bu(t) + Ed(t)y(t) = Cx(t)
where x1 = rotor-speed x2 = drive-train torsion spring force, x3=rotational generator speedu = generator torque, d : wind speed

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
More generally
Reformulate Nth-order differential equation into N simultaneousfirst-order differential equations
dnydtn + an−1
dn−1ydtn−1 + . . .+ a1y + a0y = f
Define the state variables :
x1 = ..., ,x2 = ...., , . . .xn = ...,
and give the according state space representation.Remark : Knowledge of state variables allows one to determine everypossible output of the system

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Linearisation

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
LinearisationThe linearisation can be done around an equilibrium point or around aparticular point defined by:
xeq(t) = f ((xeq(t),ueq(t), t), givenxeq(0)
yeq(t) = g((xeq(t),ueq(t), t)(14)
Definingx = x −xeq , u = u−ueq , y = y −yeq
this leads to a linear state space representation of the system, aroundthe equilibrium point:
˙x(t) = Ax(t) + Bu(t),
y(t) = Cx(t) + Du(t)(15)
with A = ∂ f∂x |x=xeq ,u=ueq , B = ∂ f
∂u |x=xeq ,u=ueq ,
C = ∂g∂x |x=xeq ,u=ueq and D = ∂g
∂u |x=xeq ,u=ueq
Usual caseUsually an equilibrium point satisfies:
0 = f ((xeq(t),ueq(t), t) (16)
For the pendulum, we can choose y = θ = f = 0.

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Linear systems : transfer function

Control ofdynamical systems
O.Sename
Introduction
Methods for systemmodelling
Physical examplesHydraulic tanks
Satellite attitude controlmodel
The DVD player
The suspension system
The wind tunnel
Energy and comfortmanagement inintelligent building
State spacerepresentationPhysical examples
Linearisation
Conversion to transferfunction
Equivalence transfer function - state space representation
Consider a linear system given by:x(t) = Ax(t) + Bu(t), x(0) = x0y(t) = Cx(t) + Du(t) (17)
Using the Laplace transform (and assuming zero initial conditionx0 = 0), (17) becomes:
s.x(s) = Ax(s) + Bu(s) ⇒ (s.In−A)x(s) = Bu(s)
Then the transfer function matrix of system (17) is given by
G(s) = C(sIn−A)−1B + D =N(s)
D(s)(18)
Matlab: if SYS is an SS object, then tf(SYS) gives the associatedtransfer matrix. Equivalent to tf(N,D)





























