Embed Size (px)
Citation preview

Portland State University Portland State University
PDXScholar PDXScholar
Electrical and Computer Engineering Faculty Publications and Presentations Electrical and Computer Engineering
10-2017
Memetic-Based Schedule Synthesis for Memetic-Based Schedule Synthesis for
Communication on Time-Triggered Embedded Communication on Time-Triggered Embedded
Systems Systems
Heyuan Shi Tsinghua University
Kun Tang Central South University
Chengbao Lio Chinese Academy of Sciences
Xiaoyu Song Portland State University, [email protected]
Chao Hu Central South University
See next page for additional authors Follow this and additional works at: https://pdxscholar.library.pdx.edu/ece_fac
Part of the Electrical and Computer Engineering Commons
Let us know how access to this document benefits you.
Citation Details Citation Details Shi, H., Tang, K., Liu, C., Song, X., Hu, C., & Sun, J. (2017). Memetic-based schedule synthesis for communication on time-triggered embedded systems. International Journal of Distributed Sensor Networks, 13(10), 1550147717738167.
This Article is brought to you for free and open access. It has been accepted for inclusion in Electrical and Computer Engineering Faculty Publications and Presentations by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected].

Authors Authors Heyuan Shi, Kun Tang, Chengbao Lio, Xiaoyu Song, Chao Hu, and Jiaguang Sun
This article is available at PDXScholar: https://pdxscholar.library.pdx.edu/ece_fac/425

Research Article
International Journal of DistributedSensor Networks2017, Vol. 13(10)� The Author(s) 2017DOI: 10.1177/1550147717738167journals.sagepub.com/home/ijdsn
Memetic-based schedule synthesis forcommunication on time-triggeredembedded systems
Heyuan Shi1, Kun Tang2, Chengbao Liu3,4, Xiaoyu Song5,Chao Hu2,6 and Jiaguang Sun1
AbstractTime-triggered systems play an important role in industrial embedded systems. The time-triggered network is deployedon the time-triggered network-on-chip implementation. It ensures the safety-critical industrial communication for real-time embedded multiprocessor systems. To guarantee the safety-critical requirements for communication, each messageis transmitted by a predefined static schedule. However, synthesizing a feasible schedule is a challenge because both spa-tial and temporal constraints should be considered. This article presents a novel memetic-based schedule synthesis algo-rithm to derive a feasible schedule by determining the offset of messages on the time-triggered network-on-chip.Memetic-based schedule synthesis algorithm is based on memetic algorithm, which incorporates local search in the itera-tions of general genetic algorithm. We compare memetic-based schedule synthesis algorithm with genetic algorithm indifferent scale of time-triggered network-on-chip and number of messages. The experimental results show that thememetic-based schedule synthesis algorithm is effective to synthesize a feasible schedule, and the failure schedule synthe-sized by memetic-based schedule synthesis algorithm is only 34.2% in average compared to the conventional geneticalgorithm.
KeywordsReal-time systems, time-triggered networks, network-on-chip, scheduling, memetic algorithm
Date received: 29 May 2017; accepted: 21 September 2017
Handling Editor: Xiuzhen Cheng
Introduction
Time-triggered systems is one of the real-time systemsfor industrial multiprocessor systems.1 At present, time-triggered systems are widely deployed in various fields,such as TTEthernet in avionic networks,2,3 Time-trig-gered protocol (TTP) in aerospace industry4 andGENESYS in embedded systems.5 TTNoC integratesthe time-triggered concepts into the network-on-chip(NoC) for safety-critical real-time embedded systems.Unlike the requirements for general networks, such asquality of service (QoS)6 as well as quality of experience(QoE)7 in wireless networks,8 user privacy in social net-works,9 or energy consumptions and prolonged
1School of Software, Tsinghua University, Beijing, China2School of Information Science and Engineering, Central South
University, Changsha, China3Institute of Automation, Chinese Academy of Sciences, Beijing, China4University of Chinese Academy of Sciences, Beijing, China5Department of Electrical & Computer Engineering, Portland State
University, Portland, OR, USA6Information and Network Center, Central South University, Changsha,
China
Corresponding author:
Kun Tang, School of Information Science and Engineering, Central South
University, Changsha 410083, China.
Email: [email protected]
Creative Commons CC-BY: This article is distributed under the terms of the Creative Commons Attribution 4.0 License
(http://www.creativecommons.org/licenses/by/4.0/) which permits any use, reproduction and distribution of the work without
further permission provided the original work is attributed as specified on the SAGE and Open Access pages (http://www.uk.sagepub.com/aboutus/
openaccess.htm).

network lifetime in wireless sensor networks,10–12
TTNoC provides the temporal predictability for safety-critical tasks, which ensures the tight and predictablecommunication latency.
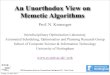
There are two main architectures for a time-triggeredembedded system, that is, bus-based and network-based architecture.13 For the bus-based architecture,only one message is transmitted on the system at thesame time. Therefore, each message owns its uniquetime slot for communication. For the network-basedarchitecture, it allows a set of messages to be trans-mitted at the same time, provided that the physicallinks used by the messages are contention-free. Figure 1shows the differences between bus-based and network-based time-triggered architectures. For the bus-basedarchitecture, the message t0 is conflicted with t1 and t2
when they transmit at the same time. In other words,all the messages (t0, t1, and t2 in Figure 1(a)) mustachieve temporal separation. In a network-based archi-tecture, the messages (t0, t1, and t2 in Figure 1(b))transmit at the same time because there is no spatialcontention among the transmission of messages. Thecontention occurs at the link between PE1 and PE4
when t0 and t3 transmit at the same time.TTNoC employs the network-based architecture. It
consists of processing elements (PEs), switches, andphysical links. PEs are interconnected by physical linksand the switches on the TTNoC. A message for com-munication consists of header and data. Headerincludes the information for message communicationon the TTNoC, for example, the addresses of sourceand destination. When the communication occurs onthe TTNoC between two nodes, the switches forwardthe message based on a given route. To ensure thecontention-free communication on the TTNoC, aschedule is required to determine the offset for eachmessage. However, synthesizing such a schedule israther complicated which is known as a nondeterminis-tic polynomial (NP)-complete problem.13,14 In this arti-cle, we give a population-based hybrid geneticalgorithm (GA) coupled with an individual learning,
called memetic-based schedule synthesis algorithm(MSSA), to synthesize a feasible schedule for the com-munication on TTNoC.
The main contributions of this article are as follows.We formally give a system model consists of architec-ture, message, and routing for the schedule synthesis.The Memetic-based Schedule Synthesis Algorithm(MSSA) is proposed to synthesize the schedule. Thesimulation based on different architecture scale andnumber of messages proves that the MSSA reduces thefailure rate so that synthesizing a feasible scheduleeffectively.
The rest of this article is organized as follows. Wefirst review the related work consists various algorithmto synthesize schedule based on different architecturesin section ‘‘Related work.’’ And the problem formula-tion consists of system model, and constraints are givenin section ‘‘Problem formulation.’’ Then, the detail ofMSSA is proposed in section ‘‘Memetic-based schedulesynthesis algorithm.’’ The experimental results areshown in section ‘‘Evaluations.’’ Finally, we concludethis article in section ‘‘Conclusion and future work.’’
Related work
There are many time-triggered applications in bothbus-based and network-based architecture. Despite ofdifferent architectures, the communication on the time-triggered systems follows an predefined and staticallyconfigured schedule to ensure contention-free.1 Thereare sufficient studies on schedule synthesis in time-triggered bus-based architecture.4,15,16 However, inbus-based architecture, synthesizing a feasible scheduleonly need to consider the temporal constraints ratherthan spatial constraints.
For the network-based architecture, most of thestudies focus on synthesizing a feasible schedule basedon satisfiability modulo theories (SMT). The schedul-ing of the general time-triggered multi-hop networkswas first considered based on SMT solver.14 However,it is unrealistic for a pure SMT approach to synthesizea schedule for a large-scale time-triggered network. Totackle the limitation of scalability based on SMT, adecomposition approach17 and an incrementalmethod14 were presented. Craciunas and Oliver1,18 gavethe solution combining task and network scheduling bySMT solver for distributed time-triggered systems. Theschedule employs in time-triggered traffic in a generalswitched Ethernet network, which can also extend tospecific Ethernet protocols such as Profinet andTTEthernet.
The schedule synthesis on network-based architec-ture in specific domains also appears in the various lit-erature. Craciunas et al.19 addressed the deterministicschedule synthesis for 802.1Qbv-compliant multi-hop
Figure 1. Two main architectures for a time-triggeredembedded system: (a) bus-based architecture and (b) network-based architecture.
2 International Journal of Distributed Sensor Networks

switched networks. Zhang et al.20 synthesized a sched-ule of a mixed-integer programming (MIP) model inEthernet-based time-triggered systems. Ro et al.21
synthesized the schedule on wireless networks by SMTsolver. In time-triggered in-Vehicle networks, the holis-tic scheduling in system design and integration wasstudied.22 The Unfixed Start Time (UST) algorithm,which schedules tasks and messages in a flexible way,was proposed.
Huang et al.13 first studied the schedule synthesisspecific to TTNoC. The problem was transformed intoa special case of two-dimensional (2D) bin packing andformulated as an SMT instance. The schedule wassynthesized by SMT solver with a First Fit DecreasingHeight Decreasing Width (FFDHDW) algorithm toimprove the algorithm performance of execution time.Scholer et al.23 proposed an optimal scheduler basedon a Boolean SAT solver for a TTNoC. Murshedet al.24 gave a scheduling model based on mixed-integerlinear programming (MILP), with both time-triggeredand event-triggered messages and constraints on NoC.Freier et al.25 proposed a heuristic algorithm for sche-duling on the scalable communication NoC-like struc-ture. The algorithm ensures that the NoC and the coreare highly utilized with pseudo-polynomial timecomplexity.
Unlike the above studies based on SMT-likeapproach, we propose a meta-heuristic approach ofmemetic-based algorithm to synthesize a feasibleschedule.
Problem formulation
In this section, we first introduce the basic notions andsystem model of TTNoC. And the constraints onTTNoC are given. Then, we formally state the schedulesynthesis problem.
System model
Architecture model. The architecture of a TTNoC ismodeled by a directed graph G=(V,L). The set of ver-tices V= fv0, . . . , vm�1g represents m identical commu-nication nodes (the PEs with switches). The edgesL � V3V comprise the communication physical linksconnecting the nodes. The physical links are full-duplex, allowing communication in both directions.Therefore, given vi, vj 2 V, hvi, vji 2 L implieshvj, vii 2 L, where hvi, vji is a pair denoting a directedphysical link connecting two adjacent nodes, from asource node vi to a sink node vj.
Message model. We denote the set of n time-triggeredmessages on the TTNoC by G= ft0, . . . , tn�1g.Message ti is modeled by the tuple
hti:H , ti:S, ti:T , ti:Di, where ti:H denotes the header ofthe message, ti:S denotes the size of the message, ti:T isthe period, and ti:D is the relative deadline of the mes-sage. Only periodic messages are discussed in this arti-cle because periodic messages are typical incommunication on real-time embedded systems.13
Routing model. Given two nodes v, v0 2 V, a route from v
to v0, denoted by rhv, v0i. The length n of the route is writ-
ten as jrhv, v0ij. A route rhvi, vji represents a forwardingpath for message communication from vi to vj on theTTNoC. Hence, its length jrhvi, vjij is the number of hopsalong this link.
Schedule synthesis model
The schedule si for message ti is defined by a tuplehsi:R, si:f, si:T , si:D, si:Li, where si:R is the route alongwhich the message ti is forwarded, si:f is the offset ofthe message, si:T denotes the period, si:D denotes therelative deadline, and si:L is the communication delay,respectively. The unit of offset, period, deadline, anddelay is macrotick, which is the minimal time slot ofcommunication and scheduling.
Let MTG denote the macrotick, then we have the fol-lowing formulas
si:T = dti:T
MTGe ð1Þ
si:D= dti:D
MTGe ð2Þ
Let WG denote the width of physical links in theTTNoC. SDG and PDG represent the switching delay inthe switches and the propagation delay between adja-cent nodes, and then, we have that
si:L= djsi:Rj3 (SDG+PDG)
MTG3 dti:S + ti:H
ti:Hee ð3Þ
where MTG denotes the value of macrotick, jsi:Rj equalsthe number of hops, and SDG+PDG is the forwardingdelay of each hop. This formula is based on Duatoet al.26 with adopting macrotick as the unit. By aboveformulas, given si and its route si:R, si:T , si:D, and si:Lcan be derived by formulas 1–3, respectively. In otherwords, we want to determine the offset si:f for eachmessage communication.
We define the whole schedule set asS= fS:R,S:F,S:T ,S:D,S:Lg, where S:R is theroutes of all messages, S:F is the offset of all messages,S:T is the period of all messages, S:D is the relativedeadline of all messages, and S:L is the delay of allmessages. Therefore, the key problem is to deriveS:F= fsi:fjsi 2 Sg based on the given system modelwith contention-free constraints.
Shi et al. 3

Contention-free constraints
The constraints for general time-triggered multi-hopnetwork are presented in Steiner.14 The constraints onthe TTNoC are similar to those on general time-triggered network that a schedule S should ensure thecontention free in both temporal and spatial domains.
Offset constraints. For the schedule of a message si 2 S,the offset si:f must have non-negative values and weshould guarantee that the message transmission is com-pleted before the deadline of the communication.Therefore, we have
Constraint 1. (si:f � 0) ^ (si:f+ si:L� si:D).
Link constraints. For each communication, a messageoccupies links in terms of a given route until the wholemessage is received by the sink node. The contentionwill happen if messages which share the overlappedroute forward simultaneously. To show the link con-straints, we first give the definition of overlap. Giventwo schedules of messages si, sj 2 S, we defineoverlap(si, sj) to indicate whether there are any commonphysical links between the routes of si and sj.overlap(si, sj) is true if the routes of si and sj share atleast one hop of physical links or false otherwise
overlap(si, sj)=true si:R \ sj:R 6¼ [
false si:R \ sj:R=[
�ð4Þ
where si:R and sj:R are routes of si and sj, respectively.Then, we define the communication time for message ti
in its kth period as an interval si(k)
si(k)= ½k 3 si:T + si:f , k 3 si:T + si:f+ si:L)si(k) 2 Z
ð5Þ
The schedule S should ensure that two messages arenever transmitted on the identical link at the same time.In other words, the synthesized schedule must guaran-tee that the links on TTNoC are contention-free. Therecomes our constraint for links:
Constraint 2. Given any p, q 2 N, si, sj 2 S such thati 6¼ j, overlap(si, sj)si(p) \ sj(q)=[.
Problem statement
The problem of schedule synthesis can be formulatedbased on the schedule synthesis description and con-straints, which are given as follows:
� The architecture of a TTNoC G=(V,L) consist-ing of the set of m communicating nodes V andinterconnection links L � V3V.
� The set of n time-triggered messages G withhti:H , ti:S, ti:T , ti:Di for each ti 2 G.
� The routes S:R of the schedule S correspondingto G.
We try to determine the offsets S:F for messages G onTTNoC G, which satisfies Constraints 1 and 2. To solvethe problem, we present the memetic-based schedulesynthesis algorithm to synthesize offset S:F which meetthe contention-free constraints.
Memetic-based schedule synthesisalgorithm
In this section, we first give the motivation of schedulesynthesis on TTNoC, and components’ representationof MSSA is also given. Then, the algorithm descriptionis proposed, followed by discussion about the details,that is, fitness function and global and local searchstrategies.
Motivation
To show the schedule synthesis problem, we first givean example of messages communication on a 3 3 3
mesh TTNoC, as shown in Figure 2.And Table 1 shows the schedule information of mes-
sages on the TTNoC. The nodes on the TTNoC isdenoted as V= fv0, . . . , v8g. The set of messages forcommunication is G= ft0, t1, t2, t3, t4g. The period isa positive power of two in terms of macrotick accord-ing to the timing specification of TTNoC.13 We assumethat the relative deadline equals its period for each mes-sage, and we adopt XY routing26 as the routing strat-egy for simplicity. The schedule synthesis problem is todetermine the offset to avoid contention among mes-sages. In other words, for each message in this example,we try to determine the offset in its possible offset.
Figure 2. Motivation of messages communication on theTTNoC.
4 International Journal of Distributed Sensor Networks

Components representation
The MSSA requires genetic representation which is sim-ilar with general GA. MSSA adopts the hyperperiodHp(S) as the definition of chromosome. The value ofhyperperiod is the least common multiple of the periodS:T among the schedule S for messages G, for example,the hyperperiod is 8 for the schedule on Table 1. Wedefine the macrotick as a gene, and the location of agene on a chromosome denotes the offset of a message.A chromosome represents a possible allocation for theoffset of messages S:F. It should be noted that a singlegene may consist of multiple offsets of messages sinceseveral messages without contention can be transmittedat the same time on the network-based TTNoC. Notethat each individual is equipped with a score, which isevaluated by some fitness function. The fitness functionis discussed later.
The population with two individuals in our motiva-tion from Table 1 is proposed in Table 2. For individ-ual in0, the offset of message from s0, s1, s2, s3, s4 is 0, 0,2, 4, and 7, respectively.
Algorithm description
Memetic algorithm (MA) is widely used as a synergy ofevolutionary or any population-based approach withseparate individual learning or local improvement pro-cedures for solution search.27,28 Based on MA, MSSAconsists global search and local search. We deploy theGA as the global search strategy. And the subset ofinfeasible schedule is chosen as the element to join thelocal search.
We formally give the algorithm as in Algorithm 1.When the MSSA starts, the offset of messages is gener-ated randomly within the possible offsets byinitPop(scale) (Line 1). The best individual best among
the population is selected by selectBest(pop). If no feasi-ble schedule exists in the initial pop, we start the itera-tion (Lines 6–18) until a feasible scheduling is derived(Lines 14–16) or an upperbound of the iteration num-ber N is reached. For each iteration, the GA operationsof crossover(pop) and mutation(pop) are employed asglobal search strategies. And the local searchlocalSearch(pop) is employed after that. After thesearch, the best individual will be chosen (Lines 11–13).The iteration ends when the chromosome of best indi-vidual is a feasible schedule (Lines 14–16). The newpopulation for the next iteration is generated by selec-tion select(pop, scale) (Line 17). The individual with
Table 1. The schedule information of messages in Figure 2.
Schedule Route Period Deadline Possible offset
s0 rh0, 4i0
2 1 f0, 1gs1 r
h3, 8i1
4 1 f0, 1, 2, 3gs2 r
h2, 7i2
4 1 f0, 1, 2, 3gs3 r
h5, 6i3
8 2 f0, 1, 2, 3, 4, 5, 6gs4 r
h1, 5i4
8 1 f0, 1, 2, 3, 4, 5, 6, 7g
Table 2. The component representation of the population consists of two individuals.
In. 0 1 2 3 4 5 6 7
in0 s1:fs0:f
s2:f s3:f s4:f
in1 s0:f s1:f s2:f s3:f s4:f
Algorithm 1. MSSA description.
Input:the size of population scalethe maximum number for iterations N
Output:best scheduling offsets S:F
1: pop initPop(scale)2: best selectBest(pop)3: if best:score= 0 then4: return S:F best:chromosome5: end if6: for i= 0 to N� 1 do7: pop crossover(pop)8: pop mutation(pop)9: pop localSearch(pop)
10: best0 selectBest(pop)11: if best0 score\best score if12: best best0
13: end if14: if best score= 0 if15: break16: end if17: pop select(pop, scale)18: end for19: return S:F best chromosome
Shi et al. 5

lower score owns more possibility to reserve for thenext iteration.
Fitness function
The fitness function is to evaluate individuals in thepopulation. To adopt the fitness function, we firstdetermine the scenario of overlap among messages.And we transform chromosome to represent the com-munication time for messages in the hyperperiod.Then, the score of each individual can be acquired bythe fitness function to evaluate the chromosome inConstraint 2.
By checking the forward routing for each messageby Formula 4, we denote the set of overlapped scheduleO(si) for si based on Formula 4, and we have
O(si)= fsjjoverlap(si, sj), si, sj 2 Sg
Table 3 shows the route based on XY routing andoverlapped set for the messages depicted in Table 1.Since overlap(s0, s1) and overlap(s0, s3) are false whileoverlap(s0, s2) and overlap(s0, s4) are true, the over-lapped set O(s0) is fs2, s4g.
The communication time of message in the kthperiod si(k) is defined by Formula 5, so we have
DHp(si)= fsi(k)jk 2 ½0,Hp(S)=si:T � 1�g
where DHp(si) denotes the communication time in ahyperperiod. We define DHp(S)= fDHp(si)jsi 2 Sg thatdenotes the set of communication time for messages ina hyperperiod. Table 4 shows communication time formessages based on given individuals in Table 2.
For si, sj 2 S, si 6¼ sj, if si and sj are overlapped, thetimes of conflicts between them should be derived toevaluate the chromosome. For si 2 S, we define C(si)to derive the set of schedule conflicted with si. So, wehave
C(si)= fsjjDHp(si) \ DHp(sj) 6¼ [, sj 2 O(si)g
If there is no conflict with si on the its duration, thenC(si)=[. We define the total times of conflicts for si
as times(si). And we have
times(si)=X
sj2C(si)
conflict(si, sj)
=X
sj2C(si)
jDHp(si) \ DHp(sj)j
where the function conflict(si, sj) is to count the times ofconflicts between si and sj. We defineC(S)= fsijC(si) 6¼ [g to denote the set of conflictingschedule. The fitness function is the sum of times ofconflicts in C(S). Thus, for a individual in, we have
fit(in)=X
si2C(S)times(si)
Since the score represents the times of conflicts, thelower the score, the better the individual is, and theindividual with score zero represents a feasible sched-ule. The score of two individuals in Table 2 is shown inTable 5.
Global search strategy
The general operation in a GA, such as crossover andmutation,29 is used in the step of global search. Foroperation of crossover, we employ two of the individu-als ini and inj among the population as parents to jointhe crossover in terms of their score. The lower score ofan individual, the higher possibility for this individualto be selected as parent. The crossover generates a newindividual called child, and its chromosome depends onthe parents. The individual of parents with lower scoreowns higher possibility to determine the offset locationsi:f for si 2 S on the chromosome of child. For parentsini and inj, we define the function
Table 3. The route and overlapped set for schedule in Table 2.
Schedule si 2 S Routing per hop si:R Overlapped set O(si)
s0 h0, 1ih1, 4i s2, s4
s1 h3, 4ih4, 5ih5, 8i s4
s2 h2, 1ih1, 4ih4, 7i s0, s4
s3 h5, 4ih4, 3ih3, 6i [s4 h1, 4ih4, 5i s0, s1, s2
Table 4. The communication time in a hyperperiod for theschedule in Table 2.
In. 0 1 2 3 4 5 6 7
in0 t0 t0 t0 t0 t4
t1 t2 t1 t3 t2
t3
in1 t0 t1 t0 t2 t0 t1 t0 t2
t3 t3 t4
Table 5. Evaluating individuals in Table 1 by the fitness function.
Individual in Conflict C(si) Conflict timestimes(si)
Score fit(in)
in0 s0, s2 times(s0)= 2 4times(s2)= 2
in1 s0, s4 times(s0)= 1 2times(s4)= 1
6 International Journal of Distributed Sensor Networks

Possibility(ini)= 1� ini
ini + inj
to represent the possibility for ini as a parent to deter-mine the offset in the chromosome of child. Table 6shows process of crossover. in2 is generated by cross-over based on the two individuals in Table 2 as parents.Because the score of in0 is 4 while in1 is 2, in0 owns 67%while in0 has 33% of possibility to determine the offset.A possible result of crossover is given: chromosome ofin2 with the offset of s0, s2, s3 from in1 and s1, s4 fromin0.
The operation of mutation randomly selects an off-set and reallocate a new offset randomly in its possibleoffset. Table 7 is an example of mutation. It is noticedthat the probability of mutation for each individual inour implement is 10%.
Local search strategy
Before the local search for each individual, the schedulesi 2 S with the maximum value of times(si) is selected aslocal search element. If there are two or more individu-als with the maximum times of conflicts, the element to
be searched is selected stochastically among them.Then, the offset of message to be searched is reallocatedin its possible offset. Each reallocated individual withminimum score replaces the previous individual.
Table 8 shows an example of local search for in0 inTable 2. Since times(s0)= times(s2)= 2 in Table 5, werandomly select s0 as the element. We locate the s0 onits possible offsets 0 and 1. After evaluating individualswithin possible offset s0:f, we select the individualwhose score is 2 as the updated in0 because this individ-ual owns the minimum score.
Evaluations
The network architecture we employed for simulationis a 2D mesh network whose scale is 3 3 3, 5 3 5, 7 3 7,9 3 9, 11 3 11, and 13 3 13, respectively. The numberof message in our evaluation is from 5 to 100. Eachmessage owns its period and delay which is randomlygenerated. The period is randomly synthesized inf2njn 2 ½1, 10�, n 2 Zg, and the delay is less than itsperiod. We compare the MSSA with the GA in variousarchitecture and number of messages, and for each
Table 6. An example of the crossover between individuals in Table 2.
Pa. 0 1 2 3 4 5 6 7in0 s0:f s2:f s3:f s4:f
s1:fin1 s0:f s1:f s2:f s3:f s4:fCh. 0 1 2 3 4 5 6 7in2 s0:f s2:f s3:f s4:f
s1:f
Table 7. An example of the mutation for individuals in Table 2.
Before 0 1 2 3 4 5 6 7
in0 s0:f s2:f s3:f s4:fs1:f
After 0 1 2 3 4 5 6 7in0 s0:f s4:f s2:f s3:f
s1:f
Table 8. Local search for individual in0 in Table 2.
Before 0 1 2 3 4 5 6 7in0 s0:f s2:f s3:f s4:f
s1:fScore 0 1 2 3 4 5 6 74 s0:f s2:f s3:f s4:f
s1:f2 s1:f s0:f s2:f s3:f s4:fAfter 0 1 2 3 4 5 6 7in0 s0:f s4:f s2:f s3:f
s1:f
Shi et al. 7

configuration of simulation, we repeat 15 times. Thesize of population in MSSA and GA is both 100.
Failure rate of schedule
The schedule of a message fails if the message commu-nication faces contention with other messages based on
this given schedule. To compare the performance ofschedule synthesis of MSSA with GA, we define thefailure schedule of messages as S:Ffail. And the failurerate of schedule Rfail as jS:Ffailj=jS:Fj. Figure 3 showsRfail for variable types of test cases by MSSA and GA,denoted as Rfail(MSSA) and Rfail(GA), respectively. Thefailure rate by the GA is higher than the MSSA in each
Figure 3. The failure rate of different number of messages on varying architectures: (a) 3 3 3 TTNoC, (b) 5 3 5 TTNoC,(c) 7 3 7 TTNoC, (d) 9 3 9 TTNoC, (e) 11 3 11 TTNoC, and (f) 13 3 13 TTNoC.
8 International Journal of Distributed Sensor Networks

configuration, especially when the scale of architectureand the number of messages are both relatively large,for example, for the case of 90 messages in 13 3 13
TTNoC, the rate is 11.9% for the GA while only 1.8%for the MSSA. It is proposed that the local search inthe MSSA is the key step to significantly improve theperformance.
We define Rfail(MSSA)=Rfail(GA) in Table 9 to com-pare MSSA with GA in different scales of architecture.From the results, we can see that the Rfail(MSSA) isabout 34.4% of the Rfail(GA). Rfail decreases when thescale of TTNoC architecture increases. The reason isthat the link resource increases with the growth ofarchitecture scale, resulting in decreasing the possibilityof contention among the messages’ transmission on theTTNoC. The failure rate of schedule increases whenthe number of messages on the TTNoC increases. It isbecause the limited link resources have to transmitmore messages when there is more messages on theTTNoC.
Feasible cases
We consider the number of feasible cases in each experi-ment type. The schedule for all messages on TTNoC isfeasible when there is no conflict between communica-tion of messages in both spatial and temporal domains.In other words, a case of communication is feasible ifeach synthesized schedule of message S:F is conten-tion-free, otherwise it is an infeasible case.
Figure 4 presents the result of numbers of feasiblecases in different scale of architecture after the schedulesynthesis. For simple test cases with less than 15 mes-sages, most of the cases are feasible. But for complextest cases of more than 60 messages, it is hard forMSSA to find a feasible schedule.
Discussion
Synthesizing a feasible schedule depends on the numberof messages, the route of messages, and the scale ofTTNoC. It is hard for MSSA to synthesize a feasible
scheduling when the set of messages is large and/or thescale of TTNoC architecture is small. However, excepttwo reasons above, the mapping between messages andnodes as well as routing strategy also affect generatinga feasible solution. The designer can manually changethe mapping allocation or the routing strategy for thefailure schedule or even design a larger scale of networkarchitecture if needed. After these changes, the feasiblescheduling can be generated by the MSSA iteratively.
Conclusion and future work
This article proposes an MSSA to synthesize the sched-ule for message communication on the TTNoC. MSSAdeploys the GA as the global search strategy, and thesubset of infeasible schedule is chosen as the element tominimize its contention times. We evaluate our MSSAand general GA with various randomly generated mes-sages on varying scales of mesh-based TTNoC. Theresults show that our MSSA is effective to synthesize aschedule with less infeasible message communication,which is 34.2% compared with the general GA. In ourfuture work, the mapping between messages and nodesand routing strategy will be integrated to our consider-ation before scheduling of messages on the TTNoC.And the different TTNoC architecture, for example,torus and hypercube, and different local search strate-gies, for example, simulated annealing, will also beimplemented in our evaluations for the improvement ofschedule synthesis performance.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest withrespect to the research, authorship, and/or publication of thisarticle.
Table 9. The average failure rate of schedule in different scaleof TTNoC.
Scale Rfail(GA) Rfail(MSSA)Rfail(GA)
Rfail(MSSA)
333 0.1857 0.1261 0.6792535 0.1226 0.0546 0.4452737 0.0994 0.0345 0.3470939 0.0721 0.0174 0.241111311 0.0618 0.0120 0.194413313 0.0557 0.0088 0.1582Average 0.0995 0.0422 0.3442
Figure 4. The number of feasible cases in different scale ofTTNoC and number of messages.
Shi et al. 9

Funding
The author(s) disclosed receipt of the following financial sup-port for the research, authorship, and/or publication of thisarticle: This research is sponsored in part by NSFC Program(No. 61527812), National Science and Technology MajorProject (No. 2016ZX01038101), MIIT IT funds (Researchand Application of TCN Key Technologies) of China, andThe National Key Technology R&D Program (No.2015BAG14B01-02).
References
1. Craciunas SS and Oliver RS. Combined task- and
network-level scheduling for distributed time-triggered
systems. Real-Time Syst 2016; 52(2): 161–200.2. Steiner W, Bauer G, Hall B, et al. TTEthernet dataflow
concept. In: Proceedings of the eighth IEEE international
symposium on networking computing and applications
(NCA 2009), Cambridge, MA, 9–11 July 2009, pp.319–
322. New York: IEEE.3. Beji S, Hamadou S, Gherbi A, et al. SMT-based cost
optimization approach for the integration of avionic
functions in IMA and TTEthernet architectures. In: 18th
IEEE/ACM international symposium on distributed simu-
lation and real time applications (DS-RT 2014), Tou-
louse, 1–3 October 2014, pp.165–174. New York: IEEE.4. Hu M, Luo J, Wang Y, et al. Scheduling periodic task
graphs for safety-critical time-triggered avionic systems.
IEEE T Aero Elec Sys 2015; 51(3): 2294–2304.5. Kopetz H. GENESYS—a cross-domain architecture for
dependable embedded systems. In: 5th Latin-American
symposium on dependable computing (LADC 2011), Sao
Paulo, 25–29 April 2011, pp.1–6. IEEE.6. Zheng X, Cai Z, Li J, et al. Scheduling flows with multi-
ple service frequency constraints. IEEE Internet Things
2017; 4(2): 496–504.7. Zheng X, Cai Z, Li J, et al. An application-aware sche-
duling policy for real-time traffic. In: 35th IEEE interna-
tional conference on distributed computing systems
(ICDCS 2015), Columbus, OH, 29 June–2 July 2015,
pp.421–430. New York: IEEE.8. Zheng X, Cai Z, Li J, et al. A study on application-aware
scheduling in wireless networks. IEEE T Mobile Comput
2017; 16: 1787–1801.9. Cai Z, He Z, Guan X, et al. Collective data-sanitization
for preventing sensitive information inference attacks in
social networks. IEEE T Depend Secure. Epub ahead of
print 26 September 2016. DOI: 10.1109/
TDSC.2016.2613521.10. Duan Z, Li W and Cai Z. Distributed auctions for task
assignment and scheduling in mobile crowdsensing sys-
tems. In: 37th IEEE international conference on distribu-
ted computing systems (ICDCS 2017), Atlanta, GA, 5–8
June 2017, pp.635–644. New York: IEEE.11. Shi T, Cheng S, Cai Z, et al. Exploring connected domi-
nating sets in energy harvest networks. IEEE ACM T
Network 2017; 25: 1803–1817.12. He Z, Cai Z, Yu J, et al. Cost-efficient strategies for
restraining rumor spreading in mobile social networks.
IEEE T Veh Technol 2017; 66(3): 2789–2800.
13. Huang J, Blech JO, Raabe A, et al. Static scheduling of atime-triggered network-on-chip based on SMT solving.In: 2012 design, automation & test in Europe conference &
exhibition (DATE 2012), Dresden, 12–16 March 2012,pp.509–514. New York: IEEE.
14. Steiner W. An evaluation of SMT-based schedule synth-esis for time-triggered multi-hop networks. In: Proceed-ings of the 31st IEEE real-time systems symposium (RTSS
2010), San Diego, CA, 30 November–3 December 2010,pp.375–384. New York: IEEE.
15. Ding S. Scheduling approach for static segment usinghybrid genetic algorithm in FlexRay systems. In: 10th
IEEE international conference on computer and informa-
tion technology (CIT 2010), Bradford, 29 June–1 July2010, pp.2355–2360. New York: IEEE.
16. Lukasiewycz M, Schneider R, Goswami D, et al. Modu-lar scheduling of distributed heterogeneous time-triggeredautomotive systems. In: Proceedings of the 17th Asia and
South Pacific design automation conference (ASP-DAC
2012), Sydney, NSW, Australia, 30 January–2 February2012, pp.665–670. IEEE.
17. Pozo F, Steiner W, Rodriguez-Navas G, et al. A decom-position approach for SMT-based schedule synthesis fortime-triggered networks. In: 20th IEEE conference on
emerging technologies & factory automation (ETFA
2015), Luxembourg City, 8–11 September 2015, pp.1–8.New York: IEEE.
18. Craciunas SS and Oliver RS. SMT-based task- andnetwork-level static schedule generation for time-triggered networked systems. In: 22nd international con-
ference on real-time networks and systems (RTNS ’14),Versaille, 8–10 October 2014, p.45. New York: ACM.
19. Craciunas SS, Oliver RS, Chmelik M, et al. Schedulingreal-time communication in IEEE 802.1qbv time sensitivenetworks. In: Proceedings of the 24th international confer-
ence on real-time networks and systems (RTNS 2016),
Brest, 19–21 October 2016, pp.183–192. New York:ACM.
20. Zhang L, Goswami D, Schneider R, et al. Task- andnetwork-level schedule co-synthesis of Ethernet-basedtime-triggered systems. In: 19th Asia and South Pacific
design automation conference (ASP-DAC 2014), Singa-pore, 20–23 January 2014, pp.119–124. IEEE.
21. Ro JW, Roop PS and Malik A. Schedule synthesis fortime-triggered multi-hop wireless networks with retrans-missions. In: IEEE 18th international symposium on real-
time distributed computing (ISORC 2015), Auckland,New Zealand, 13–17 April 2015, pp.94–101. New York:IEEE.
22. Hu M, Luo J, Wang Y, et al. Holistic scheduling of real-time applications in time-triggered in-vehicle networks.IEEE T Ind Inform 2014; 10(3): 1817–1828.
23. Scholer C, Krenz-Baath R, Murshed A, et al. Optimalsat-based scheduler for time-triggered networks-on-a-chip. In: 10th IEEE international symposium on industrial
embedded systems (SIES 2015), Siegen, 8–10 June 2015,pp.156–161. New York: IEEE.
24. Murshed A, Obermaisser R, Ahmadian H, et al. Schedul-ing and allocation of time-triggered and event-triggeredservices for multi-core processors with networks-on-a-
chip. In: 13th IEEE international conference on industrial
10 International Journal of Distributed Sensor Networks

informatics (INDIN 2015), Cambridge, 22–24 July,pp.1424–1431. New York: IEEE.
25. Freier M and Chen J. Time-triggered communicationscheduling analysis for real-time multicore systems. In:10th IEEE international symposium on industrial embedded
systems (SIES 2015), Siegen, 8–10 June 2015, pp.108–116. New York: IEEE.
26. Duato J, Yalamanchili S and Ni LM. Interconnection
networks—an engineering approach. New York: IEEE,1997.
27. Chen X, Ong Y, Lim M, et al. A multi-facet survey on
memetic computation. IEEE T Evolut Comput 2011;
15(5): 591–607.28. Ong Y, Lim M and Chen X. Memetic computation–past,
present & future (research frontier). IEEE Comp Int Mag
2010; 5(2): 24–31.29. Shi H, Song X, Gu M, et al. Task and participant sche-
duling of trading platforms in vehicular participatory
sensing networks. Sensors 2016; 16(12): 2013.
Shi et al. 11



![SCI 379 - Memetic Algorithms in Constrained Optimization9].pdf · Memetic Algorithms in Constrained Optimization Tapabrata Ray and Ruhul Sarker 9.1 Introduction Memetic Algorithms(MAs)](https://img.dokumen.tips/doc/110x75/5f07663f7e708231d41ccaec/sci-379-memetic-algorithms-in-constrained-optimization-9pdf-memetic-algorithms.jpg)