Embed Size (px)
DESCRIPTION
Digital Control System
Citation preview

Reg. No: …..………………….
Name: …….………………...
M.TECH. DEGREE EXAMINATION
Model Question Paper
Second Semester
Branch: Electrical and Electronics Engineering
Specialization: Power Electronics and Control
MEEPC 202 DIGITAL CONTROL SYSTEMS [Regular/Supplementary - 2011 Admission onwards ]
Time: Three Hours Maximum: 100 Marks
Answer all Questions
1. a Obtain f(kT) by inversion integral, if F��� = ��� �� �
�������� � (8)
b. Solve the difference equation
y(k+2) - y (k+1) + 0.25y (k) = u(k+2) , where y(0) = 1, y(1) = 2.
The input function u(k) is given by u(k)=1,k=0,1,2,…… (10)
c . Explain the effect of pole and zero location on time response. (7)
OR
2.a Derive the transfer function of first order hold. (10)
b. For the sampled data system shown, find the unit step response. Sampling time T=1s
R(s) ± ⊗ Y(s)
(15)
3.a. Explain in detail stability analysis of a discrete time control system. (10)
b. Consider the discrete time unity feedback control system (with sampling period T = 1 sec)
whose open – loop pulse transfer function is given by
���� = � ��.���� ���.�����
���.���������.
Determine the range of gain K for stability by use of the Jury stability test. Also, obtain the
frequency of the sustained oscillations. (15)
Z-O-H
)2(
1
+s
s
1
OR
4. a. Explain computation of discrete equivalents by numerical integration. (10)
b. Compute the discrete equivalent of H(s) =)1(
1
+ss
by using (i) Zero pole matching and (ii) Zero order Hold equivalent. (15)
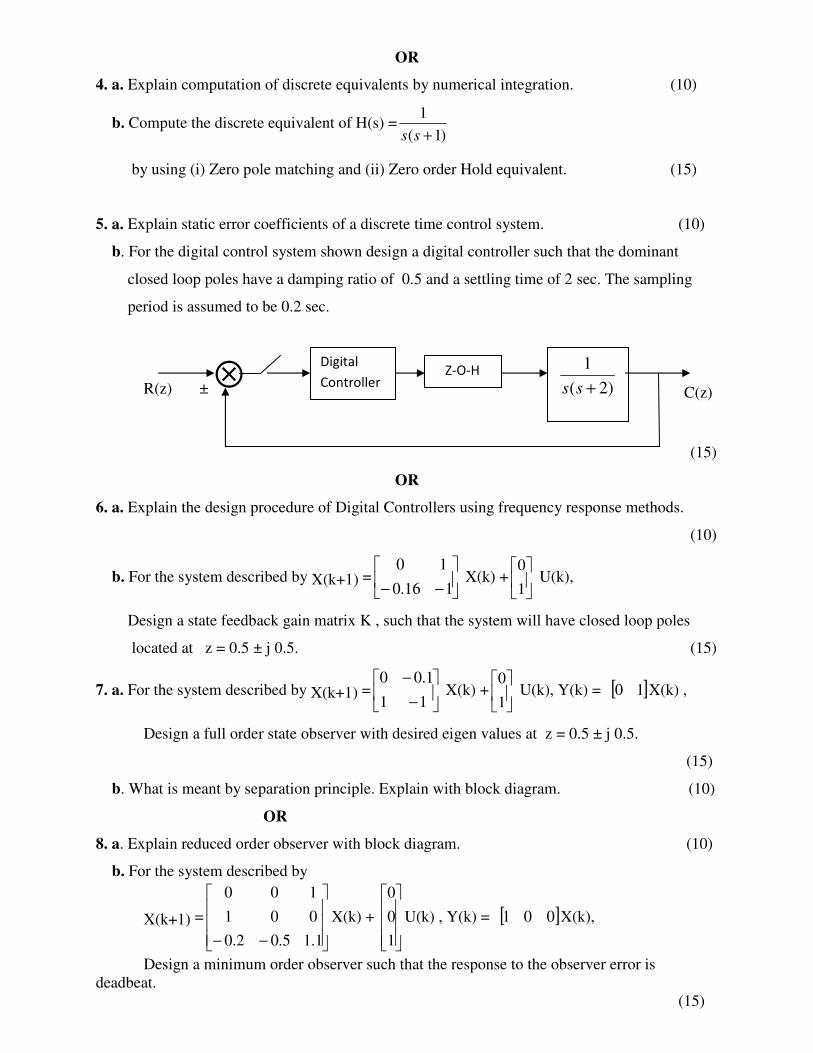
5. a. Explain static error coefficients of a discrete time control system. (10)
b. For the digital control system shown design a digital controller such that the dominant
closed loop poles have a damping ratio of 0.5 and a settling time of 2 sec. The sampling
period is assumed to be 0.2 sec.
R(z) ±⊗
C(z)
(15)
OR
6. a. Explain the design procedure of Digital Controllers using frequency response methods.
(10)
b. For the system described by X(k+1) =
−− 116.0
10 X(k) +
1
0 U(k),
Design a state feedback gain matrix K , such that the system will have closed loop poles
located at z = 0.5 ± j 0.5. (15)
7. a. For the system described by X(k+1) =
−
−
11
1.00 X(k) +
1
0 U(k), Y(k) = [ ]10 X(k) ,
Design a full order state observer with desired eigen values at z = 0.5 ± j 0.5.
(15)
b. What is meant by separation principle. Explain with block diagram. (10)
OR
8. a. Explain reduced order observer with block diagram. (10)
b. For the system described by
X(k+1) =
−− 1.15.02.0
001
100
X(k) +
1
0
0
U(k) , Y(k) = [ ]001 X(k),
Design a minimum order observer such that the response to the observer error is
deadbeat.
(15)
Digital
Controller )2(
1
+ss
Z-O-H