Embed Size (px)
Citation preview

MATERIAŁY DYDAKTYCZNE DO ZAJĘĆ
LABORATORYJNYCH Z PRZEDMIOTU MECHANIKA
8 Przedmiot: Mechanika
Specjalność: Mechatronika
Rozkład zajęć w czasie studiów
Rok
studiów Semestr
Liczba godzin w tygodniu
Liczba godzin w semestrze
W Ć L S W Ć L S I I 2 2 – – 30 30 – –
II 1 – 1 – 15 – 15 –
II III – – – – – – – –
IV – – – – – – – –
III V – – – – – – – –
VI – – – – – – – –
IV VII – – – – – – – –
VIII – – – – – – – –
Razem w czasie studiów 45 30 15 –
Treść zajęć laboratoryjnych w semestrze II
Nr
tematu Tematy i ich rozwinięcie
Liczba godzin
Razem W Ćw. L
1 Podstawy pomiarów i analizy drgań mechanicznych; ocena
szkodliwości drgań dla organizmu człowieka i maszyn.
2 – – 2
2 Podstawy pomiarów akustycznych ze szczególnym
uwzględnieniem pomiarów hałasu urządzeń mechanicznych;
minimalizacja wpływu hałasu na organizm człowieka.
2 – – 2
3 Badania własności dynamicznych i identyfikacja parametrów
układu liniowego o jednym stopniu swobody; modelowanie
komputerowe układu i jego charakterystyk za pomocą MES.
2 – – 2
4 Wyważanie statyczne i dynamiczne sztywnych elementów
wirujących.
2 – – 2
5 Badania własności dynamicznych układu liniowego o wielu
stopniach swobody; modelowanie układu i dynamicznego
eliminatora drgań za pomocą MES (Nastran).
2 – – 2
6 Badania drgań skrętnych linii wałów układu napędowego–
badania numeryczne za pomocą MES (Nastran).
2 – – 2
7 Badania drgań skrętnych linii wałów układu napędowego –
badania doświadczalne; pomiar momentu obrotowego
metodą tensometrii elektrooporowej.
3 – – 3
Razem 15 – – 15

ZAGADNIENIA TEMATYCZNE
Temat 1. Podstawy pomiarów i analizy drgań
mechanicznych Zagadnienia:
Wielkości pomiarowe drgań i parametry ich ilościowej oceny
Analiza harmoniczna drgań
Poziom wielkości mierzonej
Cele dokonywania pomiarów drgań
Podstawowy układ do pomiarów drgań
Wielkości pomiarowe drgań i parametry ich ilościowej oceny
Wielkościami pomiarowymi drgań, rozumianych jako ruch niezamierzony, są
wielkości kinematyczne, jak przemieszczenie, prędkość, przyspieszenie oraz wielkości
dynamiczne (siłowe), jak siła, moment siły, ciśnienie.
Gdyby którakolwiek z tych wielkości zmieniała się harmonicznie, co w rzeczywistych
warunkach jest prawie niemożliwe, wówczas można byłoby ją scharakteryzować amplitudą,
częstością i fazą.
Rzeczywiste drganie (pokazane przykładowo na rysunku poniżej) można jednak
uważać jako drganie okresowe o pewnym okresie T lub częstotliwości f = 1/ T.
Każdą z wielkości pomiarowych można scharakteryzować za pomocą następujących
parametrów:
- wartości szczytowej np. xmax;
- wartości szczyt-szczyt, np. xmax – xmin;
- wartości skutecznej RMS (root mean square – pierwiastek średni kwadratowy), np.
- wartości średniej przebiegu, np.

Analiza harmoniczna drgań
Każda wielkość mierzalna rzeczywistego drgania okresowego może być przedsta-
wiona [4] w postaci nieskończonego szeregu Fouriera składowych harmonicznych, np.
przemieszczenie x(t) w postaci szeregu
gdzie:
, T – okres funkcji x(t);
W ćwiczeniu przeprowadza się analizę harmoniczną metodą FFT za pomocą oprogramowania
WaveView for Windows przetwornika Eagle PCI-730.
Poniżej pokazano przykładowe przebiegi czasowe i widmo wielkości x(t); na rys. a) przebieg
wielkości okresowej i jej widmo dyskretne, prążkowe oraz na rys. b) przebieg wielkości
nieokresowej i jej widmo ciągłe; c1, c2, f1, f2 – amplitudy i częstotliwości poszczególnych
harmonik.
Poziom wielkości mierzonej
Wielkości pomiarowe drgań (np. częstotliwość, przemieszczenie, ciśnienie itp.) przedstawia
się najczęściej w skali logarytmicznej. Dzięki temu otrzymuje się rozszerzenie zakresu
niskich i zagęszczenie zakresu wysokich wartości, a tym samym, taką samą względną
dokładność odczytu w całym zakresie wartości pomiarowych.
Poziom wielkości energetycznej, np. mocy I względem poziomu odniesienia Io określa
wyrażenie

natomiast poziom wielkości nieenergetycznej, np. przyspieszenia a względem poziomu
odniesienia ao określa wyrażenie
Cele dokonywania pomiarów drgań
Istnieje kilka podstawowych przyczyn, dla których wykonuje się pomiary drgań:
1) w celu stwierdzenia zgodności maksymalnych poziomów drgań z normami lub
zaleceniami;
2) w celach diagnostycznych;
3) w celu wspomagania prac projektowo-badawczych.
Drgania oddziałują szkodliwie na maszyny ale przede wszystkim na organizm człowieka.
Pełne metody oceny narażenia człowieka na drgania, niestety dość skomplikowane, podaje
norma [6]. Uproszczoną ocenę oddziaływania drgań na organizm człowieka można dokonać
na podstawie normy [5]. Norma ta wyróżnia kierunek osi poprzecznej i osi podłużnej ciała
człowieka. Dla każdego z kierunków określono dopuszczalne poziomy wartości skutecznych
przyspieszeń drgań dla częstotliwości środkowych pasm tercjowych. Na rysunku
poniżej pokazano dopuszczalne poziomy drgań dla kierunku osi poprzecznej ciała,
określające granicę zmęczenia organizmu.
Podobne zalecenia w odniesieniu do maszyn i urządzeń okrętowych podają normy [7,8] i
zalecenia PRS [9].

Podstawowy układ do pomiarów i analizy drgań mechanicznych
Schemat blokowy podstawowego układu pomiarowego do badania drgań mechanicznych.
Najpowszechniej stosowanym czujnikiem drgań jest czujnik piezoelektryczny, którego
budowę pokazano schematycznie na rysunku poniżej.
Program części doświadczalnej
1) Przeanalizować z prowadzącym zajęcia układ pomiarowy drgań.
2) Określić możliwości, cel, zakres i warunki pomiarów drgań rzeczywistego obiektu.
3) Przeprowadzić wzorcowanie toru pomiarowego. Poniżej przedstawiono przebieg
czasowy sygnału wzorcowego o częstotliwości 79.8 Hz oraz jego widmo.
1
2
3
4
5 Przekrój czujnika piezoelektrycznego typu
kompresyjnego (powstawanie ładunku
elektrycznego na ściankach piezoelektryka
powodują siły ściskające; w przetworniku typu
nożycowego ładunek generowany jest pod
wpływem sił tnących); 1 – magnes mocujący
do drgającego elementu, 2 – podstawa
akcelerometru, 3 – element piezoelektryczny
(kryształek kwarcu, tytanianu baru), 4 – masa
obciążająca, 5 – śruba docisku wstępnego

4) Dokonać rejestracji sygnału pomiarowego w czasie rzeczywistym.
5) Przeprowadzić analizę harmoniczną zarejestrowanego sygnału.

6) Określić poziom drgań obiektu. Ocenić na podstawie norm lub zaleceń dopuszczalny
czas oddziaływania zarejestrowanych drgań na organizm człowieka oraz stan obiektu.
7) Wykonać sprawozdanie z ćwiczenia.
Literatura podstawowa 1. Kaczmarek J.: Podstawy teorii drgań i dynamiki maszyn. WSM, Szczecin 2000 (str.
111÷130).
Literatura uzupełniająca
2. Engel Z.: Ochrona środowiska przed drganiami i hałasem. Wydawnictwo Naukowe
PWN, Warszawa 2001 (str. 115÷154).
3. Kaczmarek J.: Zwalczanie drgań i hałasu. WSM, Szczecin 2002(str. 7÷33).
4. Ozimek E.: Podstawy teoretyczne analizy widmowej sygnałów. PWN, Warszawa-
Poznań 1985 (rozdz. 2,str. 18÷54).
5. ISO-2631/1978. Guide for the evaluation of human exposure to whole-body vibration.
6. PN-91/N-01354. Drgania. Dopuszczalne wartości przyspieszenia drgań o ogólnym
oddziaływaniu na organizm człowieka i metody oceny narażenia.
7. PN-92/W-01351. Drgania mechaniczne i wstrząsy. Wytyczne do ogólnej oceny drgań
na statkach handlowych.
8. PN-92/W-01352. Drgania na statkach. Metodyka pomiarów i rejestracji danych.
9. Publikacja PRS nr2/I: Zapobieganie drganiom na statkach. Gdańsk 1988.
Schemat sprawozdania
Wydział, rok, grupa , imię i nazwisko wykonującego sprawozdanie
1. Temat ćwiczenia.
2. Cel ćwiczenia.
3. Schemat i dane układu pomiarowego.
4. Wyniki wzorcowania toru pomiarowego
5. Zapis drgań badanego obiektu w czasie rzeczywistym i jego widmo.
6. Ocena poziomu drgań badanego obiektu i dopuszczalny czas oddziaływania
zarejestrowanych drgań na organizm człowieka.
Temat 2. Podstawy pomiarów akustycznych ze szczegól-
nym uwzględnieniem pomiarów hałasu urządzeń
mechanicznych.
Zagadnienia:
Podstawowe wielkości pomiarowe drgań akustycznych
Cele dokonywania pomiarów hałasu
Podstawowy układ do pomiarów i analizy hałasu
Podstawowe wielkości pomiarowe drgań akustycznych
Wrażenie słuchowe zależy głównie od częstotliwości drgań akustycznych oraz
poziomu ciśnienia akustycznego, czyli natężenia energii drgań akustycznych docierającej do
ucha. Słyszalny zakres częstotliwości to 16÷20000 Hz.
Poziom Lp ciśnienia akustycznego p jest względną miarą ciśnienia akustycznego
określoną wyrażeniem
gdzie:
ciśnienie odniesienia.
Całkowity poziom ciśnienia akustycznego dźwięku złożonego z n pasm o
poziomach ciśnienia wynosi
Poziom głośności to względna miara głośności dźwięku. Jednostką poziomu głośności
jest 1 fon. Dźwięk ma poziom głośności n fonów, jeżeli oceniany jest przez osobnika
słuchowo (otologicznie) zdrowego, jako równie głośny z dźwiękiem prostym (tonem) o
częstotliwości 1000 Hz i poziomie ciśnienia akustycznego n decybeli.
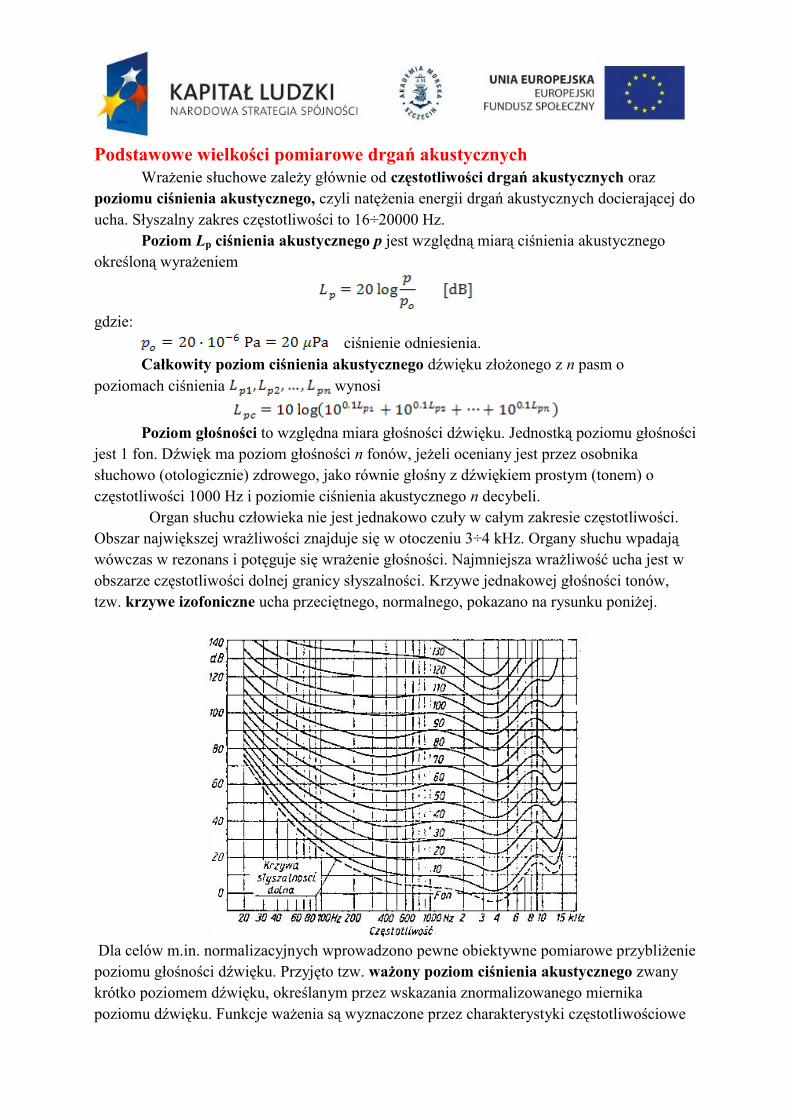
Organ słuchu człowieka nie jest jednakowo czuły w całym zakresie częstotliwości.
Obszar największej wrażliwości znajduje się w otoczeniu 3÷4 kHz. Organy słuchu wpadają
wówczas w rezonans i potęguje się wrażenie głośności. Najmniejsza wrażliwość ucha jest w
obszarze częstotliwości dolnej granicy słyszalności. Krzywe jednakowej głośności tonów,
tzw. krzywe izofoniczne ucha przeciętnego, normalnego, pokazano na rysunku poniżej.
Dla celów m.in. normalizacyjnych wprowadzono pewne obiektywne pomiarowe przybliżenie
poziomu głośności dźwięku. Przyjęto tzw. ważony poziom ciśnienia akustycznego zwany
krótko poziomem dźwięku, określanym przez wskazania znormalizowanego miernika
poziomu dźwięku. Funkcje ważenia są wyznaczone przez charakterystyki częstotliwościowe

filtrów korekcyjnych miernika, dopasowujące wskazania miernika do wartości poziomów
głośności, określonych krzywymi izofonicznymi. W typowych pomiarach hałasu stosuje się
najczęściej charakterystykę ważenia filtrem typu A (pokazana będzie w kolejnym
punkcie). Poziom dźwięku podaje się więc najczęściej w dB(A) i oznacza LA.
W pomiarach hałasu rozróżnia się:
- hałas o poziomie ustalonym, tzn. o poziomie dźwięku LA zmieniającym się w czasie nie
więcej niż o 5 dB;
- hałas impulsowy, tj. hałas składający się z jednego lub kilku impulsów dźwiękowych,
każdy o czasie trwania mniejszym niż 1 s.
Jeżeli w pomiarach hałasu, np. w pomieszczeniu, w kolejnych n odcinkach czasu poziom
hałasu jest ustalony, wyznacza się w tych odcinkach czasu średni poziom dźwięku
Jeżeli występuje hałas o poziomie nieustalonym lub hałas jest nieregularny, przerywany,
wyznacza się tzw. równoważny poziom dźwięku A
lub
gdzie:
T – czas obserwacji, w s;
- średni poziom dźwięku A występujący w czasie ti, w którym hałas można
uznać za ustalony;
n – liczba odcinków czasowych ti;
pA – wartość chwilowa ciśnienia akustycznego, skorygowana według charakterystyki
częstotliwościowej A, w Pa.
Ekspozycja na hałas określana jest według wzoru [5]
gdzie:
pA – wartość chwilowa ciśnienia akustycznego, skorygowana według charakterystyki
częstotliwościowej A, w Pa;
Tc – czas ekspozycji na hałas, w ciągu dnia roboczego lub określonego dłuższego
okresu, np. tygodnia pracy, w s.
Poziom ekspozycji na hałas odniesiony do 8-godzinnego dnia pracy, określa się
według wzoru [5]

gdzie:
To – czas odniesienia = 8 h =28800 s.
Cele dokonywania pomiarów hałasu
Pomiary hałasu, jako szczególnego, niepożądanego skutku drgań mechanicznych, są
dokonywane z podobnych powodów jak pomiary drgań:
1) w celu stwierdzenia zgodności poziomów hałasu z zaleceniami i normami;
2) w celach diagnostycznych maszyn i urządzeń;
3) w celu wspomagania prac projektowo-badawczych.
Ad 1) W wielu dziedzinach przemysłu czy też obszarach życia ludzi (np. w środowisku pracy,
na trasach komunikacyjnych, itp.), istnieją już dzisiaj normy ograniczające poziom hałasu do
wartości nie zagrażających zdrowiu człowieka. Z konieczności podane zostaną więc tylko
postanowienia normy dotyczące środowiska pracy [5].
Poziom ekspozycji na hałas odniesiony do 8-godzinnego dnia pracy nie
powinien przekraczać 85 dB, a odpowiadająca mu ekspozycja dzienna nie powinna
przekraczać 3.64∙103 Pa
2s.
Maksymalny poziom dźwięku , mierzony przy włączonej charakterystyce
dynamicznej S (slow), nie powinien przekraczać wartości 115 dB.
Szczytowy poziom dźwięku C nie powinien przekraczać wartości 135 dB.
Równoważny poziom dźwięku w czasie pobytu pracownika na stanowisku
pracy, nie powinien przekraczać wartości podanych w tablicy poniżej [5].
Lp. Stanowisko pracy
Równoważny
poziom
dźwięku A
[dB]
1
W kabinach bezpośredniego sterowania bez łączności telefo-
nicznej, w laboratoriach ze źródłami hałasu, w pomieszczeniach
z maszynami i urządzeniami liczącymi, maszynami do pisania,
dalekopisami i w innych pomieszczeniach o podobnym
przeznaczeniu
75
2
W kabinach dyspozytorskich, obserwacyjnych i zdalnego stero-
wania z łącznością telefoniczną używaną w procesie sterowania,
w pomieszczeniach do wykonywania prac precyzyjnych i w
innych pomieszczeniach o podobnym przeznaczeniu
65
3
W pomieszczeniach: administracyjnych, biur projektowych, do
prac teoretycznych, opracowania danych i innych o podobnym
przeznaczeniu.
55
Podstawowy układ do pomiaru i analizy hałasu
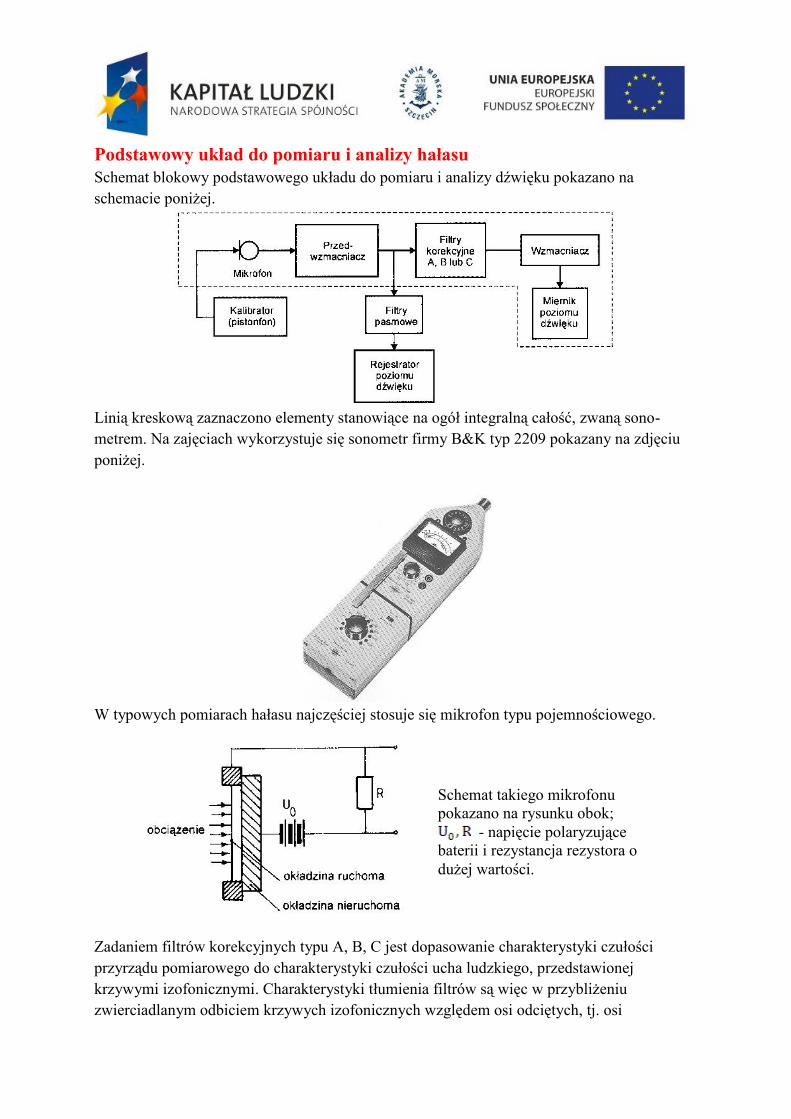
Schemat blokowy podstawowego układu do pomiaru i analizy dźwięku pokazano na
schemacie poniżej.
Linią kreskową zaznaczono elementy stanowiące na ogół integralną całość, zwaną sono-
metrem. Na zajęciach wykorzystuje się sonometr firmy B&K typ 2209 pokazany na zdjęciu
poniżej.
W typowych pomiarach hałasu najczęściej stosuje się mikrofon typu pojemnościowego.
Zadaniem filtrów korekcyjnych typu A, B, C jest dopasowanie charakterystyki czułości
przyrządu pomiarowego do charakterystyki czułości ucha ludzkiego, przedstawionej
krzywymi izofonicznymi. Charakterystyki tłumienia filtrów są więc w przybliżeniu
zwierciadlanym odbiciem krzywych izofonicznych względem osi odciętych, tj. osi
Schemat takiego mikrofonu
pokazano na rysunku obok;
- napięcie polaryzujące
baterii i rezystancja rezystora o
dużej wartości.

częstotliwości. W typowych pomiarach hałasu stosuje się najczęściej filtr typu A lub do
wyznaczenia szczytowej wartości poziomu dźwięku - filtr typu C. Charakterystyki tłumienia
tych filtrów pokazano poniżej.
Program części doświadczalnej
1) Przeanalizować z prowadzącym zajęcia zestawiony układ pomiarowy hałasu.
2) Określić możliwości, cel, zakres i warunki pomiarów hałasu, uwzględniając zalecenia
norm [4,5] przedstawione w instrukcji wykonawczej do ćwiczenia.
3) Przeprowadzić wzorcowanie toru pomiarowego za pomocą pistonfonu.
4) Uruchomić urządzenie mechaniczne i przeprowadzić pomiary hałasu w pomiesz-
czeniu. Zanotować wyniki.
5) Ocenić skuteczność tłumienia nauszników przeciwhałasowych.
6) Ocenić poziom hałasu na podstawie zaleceń normowych.
7) Wykonać sprawozdanie z ćwiczenia.
Literatura podstawowa 1. Kaczmarek J.: Podstawy teorii drgań i dynamiki maszyn. WSM, Szczecin 2000 (str.
131÷144).
Literatura uzupełniająca
2. Engel Z.: Ochrona środowiska przed drganiami i hałasem. Wydawnictwo Naukowe
PWN, Warszawa 2001 (rozdz. 5, str. 165÷182; rozdz.6, str. 183÷231).
3. Kaczmarek J.: Zwalczanie drgań i hałasu. WSM, Szczecin 2002 (rozdz. 2, str. 34÷60).
4. PN-81/N-01306. Hałas. Metody pomiaru hałasu.
5. PN-94/N-01307. Dopuszczalne wartości hałasu w środowisku pracy. Wymagania
dotyczące wykonywania pomiarów.
6. PN-W-01350-1:1996. Ochrona przed hałasem na statkach morskich. Postanowienia
ogólne.
7. PN-W-01350-2:1996. Ochrona przed hałasem na statkach morskich. Warunki i
metody pomiaru hałasu.

8. PN-W-01350-1:1996. Ochrona przed hałasem na statkach morskich. Dopuszczalne
poziom dźwięku na statkach towarowych i rybackich.
9. PN-96/EN-352-1. Ochronniki słuchu. Wymagania bezpieczeństwa i badania.
Nauszniki przeciwhałasowe.
10. PN-96/EN-352-2. Ochronniki słuchu. Wymagania bezpieczeństwa i badania. Wkładki
przeciwhałasowe.
11. PN-99/EN-24869-1. Ochronniki słuchu. Metoda subiektywna pomiaru tłumienia
dźwięku.
Schemat sprawozdania
Wydział, rok, grupa , imię i nazwisko wykonującego sprawozdanie
1. Temat ćwiczenia.
2. Cel ćwiczenia.
3. Schemat i dane układu pomiarowego.
4. Wyniki wzorcowania toru pomiarowego za pomocą pistonfonu.
5. Wyniki pomiarów poziomu Llin , LA i widma hałasu w badanym pomieszczeniu bez
pracującego źródła hałasu (tło) i z pracującym źródłem
Llin
[dB]
LA
[dB]
Widmo hałasu [dB]
31.5 63 125 250 500 1000 2000 4000 8000
Tło
Ze źródłem hałasu
6. Ocena skuteczności tłumienia hałasu przez nauszniki przeciwhałasowe.
7. Ocena poziomu hałasu w badanym pomieszczeniu na podstawie zaleceń normowych.

Temat 3. Badanie własności dynamicznych i identyfikacja
parametrów układu o jednym stopniu swobody
Zagadnienia:
Cel i istota metody identyfikacji parametrów układu liniowego o
jednym stopniu swobody
Modelowanie układu i jego charakterystyki częstotliwościowej za
pomocą programu NEi Nastran FEA
Jednym z istotnych elementów badania i modyfikacji własności dynamicznych układów
mechanicznych jest identyfikacja parametrów układu. W niniejszym ćwiczeniu przestawiono
metodę identyfikacji parametrów układu liniowego o jednym stopniu swobody, opartą na
obserwacji drgań swobodnych tłumionych i wykorzystującą podstawowe charakterystyki
własności dynamicznych, tj. częstości drgań własnych nietłumionych i tłumionych.
Schemat stanowiska laboratoryjnego i układu pomiarowego oraz model
układu
1 – masa podstawowa układu w postaci sztywnej płyty podpartej przegubowo na jednym
końcu, 2 – masy dodatkowe, 3 – tłumik wiskotyczny, 4 – sprężyny podpierające, 5 – sprężyna
wymuszenia kinematycznego, 6 – czujniki piezoelektryczne, 7 – wzmacniacze, 8 – miernik
poziomu i fazy drgań, 9 – analizator częstotliwości, 10 – rejestrator przebiegu drgań w postaci
przetwornika A/C; X – oś redukcji układu, m, c, b – parametry modelu stanowiska: masa,
współczynnik sztywności i współczynnik oporu wiskotycznego; - funkcja
rzeczywistego wymuszenia kinematycznego o amplitudzie i częstości ; –
zredukowane do osi X wymuszenie kinematyczne o amplitudzie e i częstości

Istota metody identyfikacji
Na podstawie obserwacji drgań swobodnych tłumionych układu (rysunek poniżej), można
wyznaczyć doświadczalnie okres T oraz logarytmiczny dekrement tłumienia
gdzie N – liczba drgań układu wziętych do badań.
W części teoretycznej wyznaczono zależność od parametrów układu (m, c, b) częstości drgań
własnych nietłumionych i tłumionych
Można więc napisać równanie
z dwiema niewiadomymi m i c. Dodajemy teraz do nieznanej masy m układu masę dodatkową
Δm o znanej wartości i ponownie wyznaczamy doświadczalnie okres i logarytmiczny
dekrement tłumienia . Częstość drgań własnych układu z masą dodatkową Δm spełnia
teraz równanie
Po rozwiązaniu powyższych dwóch równań, otrzymuje się wzory identyfikacyjne masy m
układu
a następnie współczynnika sztywności c i współczynnika oporu wiskotycznego b

Modelowanie układu i jego charakterystyki częstotliwościowej za pomocą
programu MES Nei Nastran
Wspólnie z prowadzącym zajęcia analizuje się sposób tworzenia modelu układu za pomocą
programu NEi Nastran FEA. Przyjmuje się podczas modelowania wyznaczone wcześniej
wartości parametrów układu m, c, b. Analizuje się również sposób tworzenia charakterystyki
podatności modelu układu i bada się wpływ parametrów układu na tą charakterystykę.
Program części doświadczalnej
1) Zapoznać się ze stanowiskiem doświadczalnym i układem pomiarowym oraz określić
cel ćwiczenia.
2) Zarejestrować przetwornikiem A/C w czasie rzeczywistym przebiegi wybranej
wielkości kinematycznej podczas drgań swobodnych układu rzeczywistego bez masy
dodatkowej i z masą dodatkową , lub dokonać symulacji komputerowej drgań
swobodnych modelu układu , utworzonego wcześniej, za pomocą programu NEi
Nastran FEA, przez prowadzącego zajęcia.
Poniżej pokazano przebieg w czasie drgań swobodnych modelu układu bez masy
dodatkowej, otrzymanych za pomocą programu NEi Nastran FEA.
3) Wyznaczyć na podstawie wzorów identyfikacyjnych estymatory parametrów układu
m, c, b.
4) Przeanalizować wspólnie z prowadzącym zajęcia sposób modelowania układu i jego
charakterystyki podatności za pomocą programu NEi Nastran FEA.
5) Zbadać wpływ parametrów układu na charakterystykę podatności układu i możliwości
jej modyfikacji.
6) Wykonać sprawozdanie z ćwiczenia.

Literatura podstawowa
1. Kaczmarek J.: Podstawy teorii drgań i dynamiki maszyn. WSM, Szczecin 2000 (str.
145÷149).
Literatura uzupełniająca
2. Adams V., Askenazi A.: Building Better Products with Finite Element Analysis.
OnWord Press, Santa Fe 1999.
3. Giergiel J., Uhl T.: Identyfikacja układów mechanicznych. PWN, Warszawa 1990.
Schemat sprawozdania
Wydział, rok, grupa , imię i nazwisko wykonującego sprawozdanie
1. Temat ćwiczenia.
2. Cel ćwiczenia.
3. Schemat badanego układu i schemat oraz dane układu pomiarowego.
4. Wyniki pomiarów okresu i logarytmicznego dekrementu tłumienia drgań swobodnych
układu podstawowego i układu z masą dodatkową .
5. Wyniki obliczeń wartości identyfikowanych parametrów układu m, c, b.
6. Charakterystyka podatności układu otrzymana za pomocą programu NEi Nastran FEA
i możliwości jej modyfikacji.
Temat 4. Wyważanie statyczne i dynamiczne sztywnych
elementów wirujących
Niewyważenie jest jedną z najczęstszych przyczyn powstawania drgań w układach
mechanicznych. Skutki działania sił wymuszających spowodowanych niewyważeniem, tj.
proporcjonalnych do kwadratu prędkości obrotowej wirującego elementu, omówiono w części
wykładowej zajęć. Ćwiczenie niniejsze poświęcone jest jednemu ze sposobów minimalizacji
drgań, tj. minimalizacji drgań w jego źródle przez minimalizację amplitudy siły
wymuszającej, spowodowanej właśnie niewyważeniem.
Zagadnienia:
Pojęcie niewyważenia wirnika elementarnego.
Wyważarki do wyważania statycznego.
Przebieg procesu wyważania. Wyznaczanie niewyważenia jawnego.
Dopuszczalne niewyważenie resztkowe. Klasy dokładności
wyważenia.

Niewyważenie elementarnego wirnika
Rozważania niniejsze dotyczą wirników sztywnych, tzn. takich, których prędkość
eksploatacyjna nie przekracza połowy pierwszej prędkości krytycznej drgań giętnych.
Pod pojęciem wirnika elementarnego rozumie się cienką tarczę (np. tarczę szlifierską,
koło zębate, koło pasowe, w przybliżeniu śrubę okrętową itp.) o masie mw.
Niewyważeniem wirnika elementarnego nazwano moment statyczny masy mn względem
osi wirnika O
Moduł niewyważenia [gmm] nazwano wartością niewyważenia a kąt - kątem
niewyważenia.
Niewyważeniem właściwym (tj. przypadającym na jednostkę masy wirnika) inaczej
mimośrodowością wirnika nazwano stosunek niewyważenia do masy wirnika mw
Jednostką mimośrodowości jest gmm/kg czyli μm. Mimośród określa położenie środka
masy wirnika S.
Wyważarki do wyważania statycznego
Wyważanie statyczne wirnika można przeprowadzić na nie wirującym wirniku
wykorzystując działanie sił ciężkości (tzw. wyważanie grawitacyjne) lub na wirniku
wirującym wykorzystując odśrodkowe siły bezwładności (tzw. wyważanie kinetostatyczne) –
rysunek poniżej [1].
ω
S
Zakładamy, że cała masa wirnika jest
rozłożona idealnie symetrycznie względem
osi wirnika, za wyjątkiem niewielkiej na
ogół masy niewyważonej mn, której
położenie określa promień wodzący .
Podczas obracania się wirnika z prędkością
kątową ω masa niezrównoważona mn
doznaje oddziaływania fikcyjnej siły
bezwładności
O

Równanie równowagi sił odśrodkowych bezwładności (podczas wirowania wirnika)
masy niewyważonej mn i umocowanej na wirniku masy korekcyjnej mk
mn rn ω2 = mk rk ω
2 [N]
po podzieleniu przez kwadrat prędkości kątowej wirnika ω2 i po pomnożeniu przez
przyspieszenie ziemskie g staje się równaniem równowagi statycznej momentów sił ciężkości
masy niewyważonej i masy korekcyjnej
Gn rn = Gk rk [Nm]
Proces wyważania kinetostatycznego wirnika w ruchu jest więc równoważny procesowi
wyważania grawitacyjnego wirnika w spoczynku, realizowanemu w niniejszym ćwiczeniu.
Generalnie wyważarki grawitacyjne można podzielić na:
- wyważarki z prowadnicami prostoliniowymi; wyważarkę taką wykorzystuje się w
niniejszym ćwiczeniu; na rysunku poniżej widoczne jest wyważane w ćwiczeniu koło zębate
osadzone na wale pomocniczym wspartym na prowadnicach prostoliniowych wyważarki;
Idea wyważania statycznego
grawitacyjnego i kinetostatycznego [1];
mn, mk – masa niewyważona i masa
korekcyjna, rn, rk – promień wodzący
masy niewyważonej i masy korekcyjnej
względem osi wirnika, Gn, Gk – siła
ciężkości masy niewyważonej i masy
korekcyjnej, ω – prędkość kątowa
wirującego wirnika

- wyważarki z podparciami rolkowymi łożyskowanymi tocznie – rysunek poniżej [1];
- wyważarki z podparciami tarczowymi oraz konstrukcja tarczy podpierającej [1];
1 – tarcza, 2 – oś, 3 – pierścień zewnętrzny, 4 – pierścień wewnętrzny, 5 – obudowa
Przebieg procesu wyważania. Wyznaczanie niewyważenia jawnego
W niniejszym ćwiczeniu wyważanie statyczne elementu przeprowadza się na
wyważarce z prowadnicami prostoliniowymi. Przed rozpoczęciem procesu wyważania
sprawdza się poziomość prowadnic – odchyłka nie może przekraczać 0.02 mm/m [1].
Następnie wyważany element umieszcza się bardzo ostrożnie na prowadnicach, tak
aby nie uszkodzić prowadnic jak i czopów wału pomocniczego, na którym osadzony jest
wyważany element. Na wyważany element działają siła ciężkości G samego elementu i wału
pomocniczego oraz siły reakcji prowadnic.
Wyważarka z podparciami
rolkowymi [1]; 1 – wytoczenie
centrujące, 2 – płyta przesuwana
pionowo, 3 - pręt prowadzący, 4 –
śruba, h – wysokość podpory ustalana
w zależności od średnicy
wyważanych elementów

Siły działające na wyważany element [1]; Gn, rn – ciężar i promień masy niewyważonej
elementu
Reakcje normalne prowadnic przesunięte z punktu teoretycznego styku prowadnic i
czopów o wartość współczynnika tarcia tocznego, powodują opór toczenia o momencie
Mt = G [Nm]
Jeżeli moment czynny (obrotowy ) Mo
Mo = rn Gn [Nm]
- jest większy od momentu tarcia Mt, tzn. Mo > Mt, to niewyważona tarcza ruszy z miejsca;
taki stan niewyważenia nazwano niewyważeniem jawnym;
- jest mniejszy od momentu tarcia Mt, tzn. Mo ≤ Mt, to niewyważona tarcza pozostanie w
spoczynku na prowadnicach; taki stan niewyważenia nazwano niewyważeniem ukrytym.
W fazie konstruowania ustala się dla wirnika dopuszczalną mimośrodowość ed. Po
wyważeniu wirnika może więc pozostać dopuszczalny moment obrotowy Md
Md =ed G [Nm]
przy czym
- dla lekkich wirników wirujących z małą prędkością obrotową na ogół Md > Mt i w takim
przypadku zmniejsza się tylko niewyważenie jawne;
- dla ciężkich wirników wirujących z dużą prędkością obrotową na ogół Md < Mt i w takim
przypadku należy usunąć niewyważenie jawne i zmniejszyć niewyważenie ukryte.
W niniejszym ćwiczeniu zmniejsza się tylko niewyważenie jawne dla stosunkowo
lekkiego wirnika w postaci koła zębatego.
Proces zmniejszania niewyważenia jawnego przebiega w następujących etapach:
1. Sprawdza się poziome ustawienie prowadnic wyważarki za pomocą warsztatowej
poziomicy.
2. Ostrożnie umieszcza się wyważany wirnik (aby nie uszkodzić prowadnic i wału
pomocniczego wirnika) na prowadnicach wyważarki.
3. Wyważany wirnik ustawi się po pewnej liczbie wahnięć w położeniu, w którym masa
niewyważona, jak i środek ciężkości wirnika, znajdują się w pionowej płaszczyźnie,
przechodzącej przez oś wału pomocniczego. Zaznacza się wówczas najniżej położony
punkt na obwodzie wirnika.
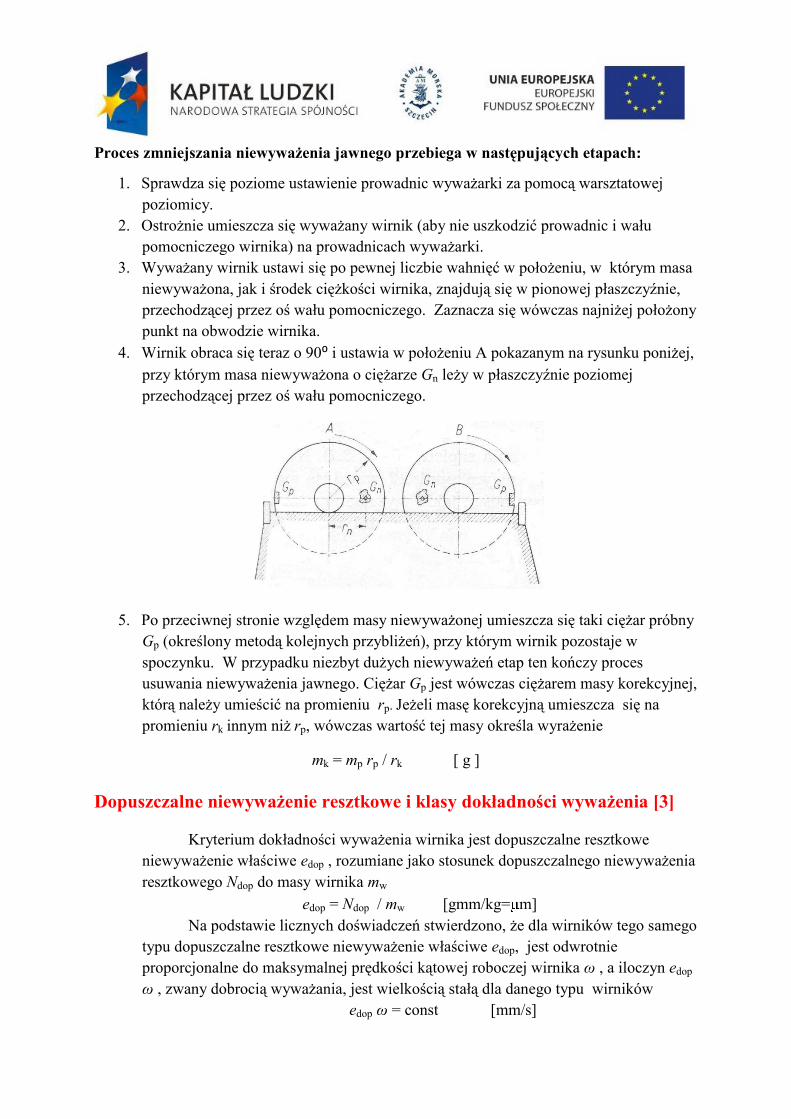
4. Wirnik obraca się teraz o 90⁰ i ustawia w położeniu A pokazanym na rysunku poniżej,
przy którym masa niewyważona o ciężarze Gn leży w płaszczyźnie poziomej
przechodzącej przez oś wału pomocniczego.
5. Po przeciwnej stronie względem masy niewyważonej umieszcza się taki ciężar próbny
Gp (określony metodą kolejnych przybliżeń), przy którym wirnik pozostaje w
spoczynku. W przypadku niezbyt dużych niewyważeń etap ten kończy proces
usuwania niewyważenia jawnego. Ciężar Gp jest wówczas ciężarem masy korekcyjnej,
którą należy umieścić na promieniu rp. Jeżeli masę korekcyjną umieszcza się na
promieniu rk innym niż rp, wówczas wartość tej masy określa wyrażenie
mk = mp rp / rk [ g ]
Dopuszczalne niewyważenie resztkowe i klasy dokładności wyważenia [3]
Kryterium dokładności wyważenia wirnika jest dopuszczalne resztkowe
niewyważenie właściwe edop , rozumiane jako stosunek dopuszczalnego niewyważenia
resztkowego Ndop do masy wirnika mw
edop = Ndop / mw [gmm/kg= m]
Na podstawie licznych doświadczeń stwierdzono, że dla wirników tego samego
typu dopuszczalne resztkowe niewyważenie właściwe edop, jest odwrotnie
proporcjonalne do maksymalnej prędkości kątowej roboczej wirnika ω , a iloczyn edop
ω , zwany dobrocią wyważania, jest wielkością stałą dla danego typu wirników
edop ω = const [mm/s]

Na tej podstawie podzielono wirniki sztywne na 11 klas dokładności
wyważenia – tablica 1 [3].
Klasa
jakości
wyważenia
Wartość
iloczynu
edopω
[mm/s]
Typy wirników – wybrane przykłady
G 4000 4000 Zespoły napędowe korbowe sztywno posadowionych
wolnoobrotowych silników okrętowych wysokoprężnych
o nieparzystej liczbie cylindrów.
G 1600 1600 Zespoły napędowe korbowe sztywno posadowionych
dużych silników dwusuwowych.
G 630 630 Zespoły napędowe korbowe sprężyście posadowionych
okrętowych silników wysokoprężnych.
G 250 250 Zespoły napędowe korbowe, sztywno posadowionych
szybkoobrotowych, czterocylindrowych silników
wysokoprężnych.
G 100 100 Kompletne silniki do samochodów osobowych,
ciężarówek i lokomotyw.
G 40 40 Koła samochodowe, obręcze kół, zespoły kół, wały
napędowe.
G 16 16 Wały napędowe (wały śrubowe, wały przegubowe
specjalne).
G 6.3 6.3 Główne morskie przekładnie turbinowe (marynarka
handlowa). Wentylatory. Koła zamachowe. Wirniki
pomp. Tworniki średnich i dużych maszyn
elektrycznych.
G 2.5 2.5 Turbiny gazowe i parowe (z wyłączeniem turbin
okrętowych). Bębny, dyski pamięci komputerów. Napędy
obrabiarek.
G 1 1 Układy napędowe magnetofonów i gramofonów. Napędy
szlifierek.
G 0.4 0.4 Żyroskopy. Wrzeciona, tarcze i tworniki precyzyjnych
szlifierek.

Maksymalne dopuszczalne względne niewyważenie resztkowe odpowiadające różnym
klasom jakości wyważenia, według powyższej tablicy [3].
Przebieg ćwiczenia i opracowanie wyników pomiarów
1. Sprawdzenie przygotowania studentów do zajęć.
2. Zapoznanie się z budową wyważarki i wyważanym wirnikiem.
3. Wspólnie z prowadzącym zajęcia wypoziomować prowadnice wyważarki za
pomocą warsztatowej poziomicy.
4. Ostrożnie położyć wyważany wirnik na prowadnicach wyważarki.

5. Przeprowadzić proces zmniejszenia niewyważenia jawnego wyważanego
wirnika, według algorytmu omówionego powyżej.
6. Wyznaczyć masę korekcyjną w miejscu optymalnym dla danego wirnika i
zamocować ją na wirniku.
7. Wykonać sprawozdanie według schematu przedstawionego poniżej.
Literatura
1. Łączkowski R.: Wyważanie elementów wirujących. WNT, Warszawa 1979.
2. PN-93/N-01361. Wyważanie. Terminologia. (ISO 1925-1990).
3. PN-93/N-01359. Wyważanie wirników sztywnych. Wyznaczanie
dopuszczalnego niewyważenia resztkowego. (ISO 1940/1-1986).
4. PN-81/N-33000. Śruby napędowe okrętowe. Wymagania i badania.
Schemat sprawozdania
Wydział, rok, grupa , imię i nazwisko wykonującego sprawozdanie
1. Temat ćwiczenia.
2. Cel ćwiczenia.
3. Schemat wyważarki i wyważanego wirnika z jego danymi.
4. Wartość masy korekcyjnej i jej położenia na wirniku.
5. Ocena procesu wyważania.
Temat 5. Badanie własności dynamicznych układu o wielu
stopniach swobody Zagadnienia:
Identyfikacja częstości drgań własnych metodą drgań rezonansowych
Identyfikacja elementów macierzy podatności dynamicznej
Częściowe, choć najważniejsze charakterystyki własności dynamicznych układów
mechanicznych, tj. częstości drgań własnych ωi i postacie drgań własnych , spełniają
równanie macierzowe, warunkujące istnienie drgań własnych
gdzie A i C to macierze bezwładności i sztywności układu.
Macierz podatności dynamicznej układu zachowawczego (tj. bez tłumienia) o s
stopniach swobody, stanowiąca pełną informację o własnościach dynamicznych, określona
jest w sposób następujący

gdzie element określa wpływ amplitudy siły działającej na kierunku j-tej współrzędnej
uogólnionej na amplitudę i-tej współrzędnej uogólnionej, czyli sens fizykalny elementu ,
zwanego też współczynnikiem podatności, jest podobny do modułu podatności γ układu o
jednym stopniu swobody.
Stanowisko doświadczalne i układ pomiarowy
Badania własności dynamicznych przeprowadza się na stanowisku doświadczalnym o
dwóch stopniach swobody, pokazanym schematycznie na rysunku poniżej.
1 – sprężysta belka traktowana jako nieważka, 2 – masa skupiona m1, 3 – masa skupiona m2,
4 – wzbudnik elektromagnetyczny drgań sinusoidalnych wymuszenia kinematycznego
o amplitudzie e i częstości ν, 5 – czujniki piezoelektryczne, 6 – wzmacniacze
ładunku, 7 – miernik poziomu amplitudy i fazy drgań, 8 – rejestrator przebiegu drgań w
czasie rzeczywistym, 9 – analizator częstotliwości, 10 – rejestrator poziomu drgań,
11 – generator napięć sinusoidalnych, 12 – wzmacniacz mocy
Identyfikacja częstości drgań własnych metodą drgań rezonansowych
Wymusza się kinematycznie sinusoidalne drgania belki za pomocą sprężyny o
współczynniku sztywności ce, zmieniając w sposób ciągły częstość ν generatora napięć
sinusoidalnych.
Obserwuje się na oscyloskopie amplitudy drgań mas skupionych m1 i m2, oraz na
mierniku fazy – przesunięcie fazowe ruchu drgającego obu mas.
Częstości ν, przy których amplitudy drgań mas skupionych są możliwie największe w
danym obszarze częstotliwości, są w przybliżeniu poszukiwanymi częstościami drgań
własnych układu. Masy skupione drgają wówczas zgodnie lub przeciwnie, tzn. przesunięcie
fazowe wzajemne drgań tych mas jest równe 0⁰ lub 180⁰.
Identyfikacja elementów macierzy podatności dynamicznej Z definicji współczynnika podatności wynika, że dla analizowanego układu belko-
wego z dwoma masami skupionymi, można współczynnik ten określić ogólnym wzorem
czyli w szczególnym przypadku lub
W celu wyznaczenia wartości elementu należy umieścić jeden czujnik piezo-
elektryczny na i-tej masie a drugi na głowicy drgającej wzbudnika i dla danej częstości ν
generatora napięć sinusoidalnych wyznaczyć iloraz amplitudy przemieszczenia i-tej
masy do amplitudy przemieszczenia głowicy wzbudnika, a następnie podzielić ten iloraz
przez sztywność sprężyny wymuszenia kinematycznego.
Program części doświadczalnej
1) Zapoznać się z budową stanowiska doświadczalnego i układem pomiarowym.
2) Dokonać identyfikacji częstości drgań własnych stanowiska metodą drgań
rezonansowych.
3) Dokonać identyfikacji wartości współczynnika podatności i wykreślić jego
wykres.
4) Przeanalizować wspólnie z prowadzącym zajęcia sposób modelowania badanego
układu o dwóch stopniach swobody za pomocą programu NEi Nastran FEA.
5) Wykonać sprawozdanie z ćwiczenia.
Literatura podstawowa
1. Kaczmarek J.: Podstawy teorii drgań i dynamiki maszyn. WSM, Szczecin 2000 (str.
61÷62, 70÷71, 165, 170÷172).
Literatura uzupełniająca
2. Giergiel J., Uhl T.: Identyfikacja układów mechanicznych. PWN, Warszawa 1990.
3. Kruszewski J., Wittbrodt E.: Drgania układów mechanicznych w ujęciu
komputerowym. Zagadnienia liniowe. WNT, Warszawa 1992.
Schemat sprawozdania
Wydział, rok, grupa , imię i nazwisko wykonującego sprawozdanie
1. Temat ćwiczenia.
2. Cel ćwiczenia.

3. Schemat stanowiska doświadczalnego i układu pomiarowego.
4. Wyniki identyfikacji częstości drgań własnych układu metodą rezonansową.
5. Wyniki identyfikacji i wykres współczynnika podatności .
Temat 6. Badania drgań skrętnych linii wałów układu
napędowego – badania numeryczne za pomocą
programu NEi Nastran FEA.
Zagadnienia:
Charakterystyka badanych układów napędowych
Modelowanie fizyczne i matematyczne układów napędowych
Prognozowanie analityczne częstości i postaci drgań własnych
skrętnych układów napędowych
Modelowanie układów napędowych za pomocą programu NEi
Nastran FEA
Charakterystyka badanych układów napędowych
Rozważa się układy napędowe z silnikami spalinowymi, stosowane m.in. do napędu statków.
1 – silnik napędowy, 2 – łożysko wzdłużne, 3 – łożyska poprzeczne, 4 – pochwa wału
śrubowego, 5 – śruba napędowa
Przyjmuje się w dalszych rozważaniach, że układ jest nierozwidlony, prosty, czyli ma
strukturę szeregową.
Wprowadza się szereg uproszczeń, pozwalających analizować tylko najistotniejsze drgania
skrętne:
– zakłada się dyskretny rozkład elementów masowych i bezmasowych sprężysto-tłumiących;
– zakłada się liniowość charakterystyk układu;
– rozprzęga się drgania, tj. zakłada się niezależność drgań skrętnych, giętnych i podłużnych.
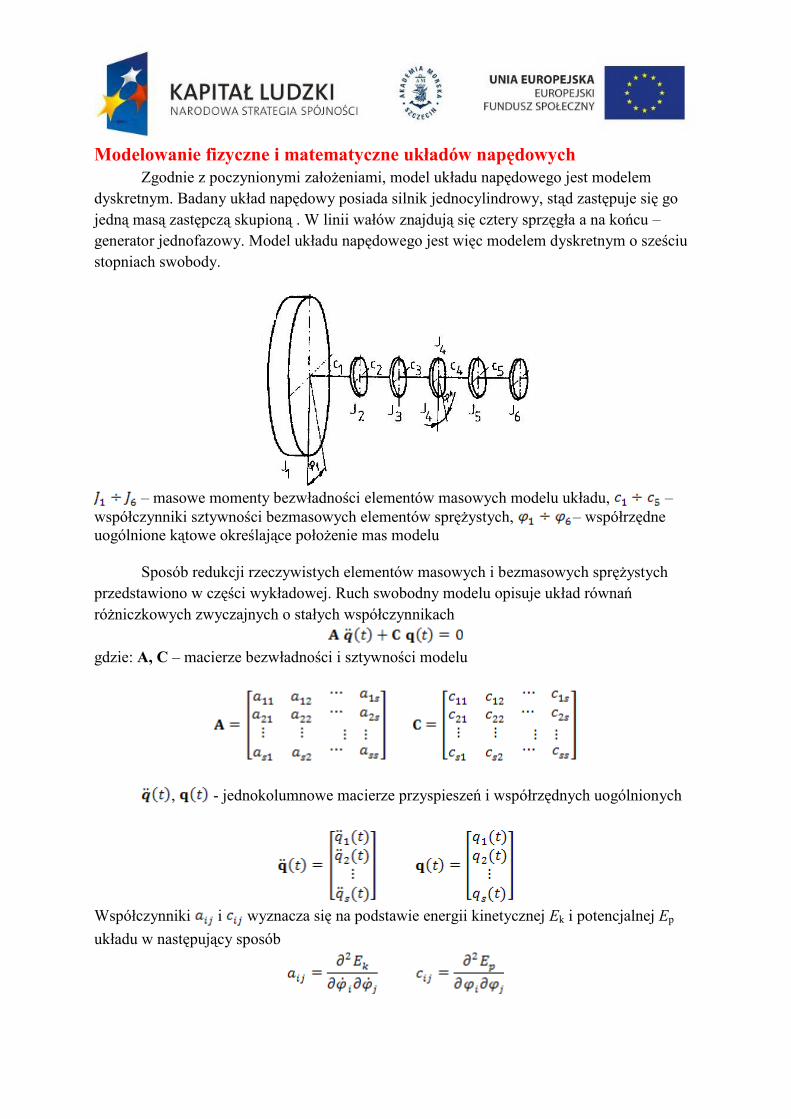
Modelowanie fizyczne i matematyczne układów napędowych
Zgodnie z poczynionymi założeniami, model układu napędowego jest modelem
dyskretnym. Badany układ napędowy posiada silnik jednocylindrowy, stąd zastępuje się go
jedną masą zastępczą skupioną . W linii wałów znajdują się cztery sprzęgła a na końcu –
generator jednofazowy. Model układu napędowego jest więc modelem dyskretnym o sześciu
stopniach swobody.
– masowe momenty bezwładności elementów masowych modelu układu, –
współczynniki sztywności bezmasowych elementów sprężystych, – współrzędne
uogólnione kątowe określające położenie mas modelu
Sposób redukcji rzeczywistych elementów masowych i bezmasowych sprężystych
przedstawiono w części wykładowej. Ruch swobodny modelu opisuje układ równań
różniczkowych zwyczajnych o stałych współczynnikach
gdzie: A, C – macierze bezwładności i sztywności modelu
, - jednokolumnowe macierze przyspieszeń i współrzędnych uogólnionych
Współczynniki i wyznacza się na podstawie energii kinetycznej Ek i potencjalnej Ep
układu w następujący sposób

Dla rozważanych układów napędowych prostych o strukturze szeregowej o s stopniach swo-
body energia mechaniczna jest postaci
oraz macierz bezwładności A jest macierzą diagonalną a macierz sztywności C macierzą
trójdiagonalną
Prognozowanie analityczne częstości i postaci drgań własnych skrętnych
układów napędowych Prognozowanie częstości i postaci drgań własnych modeli układów napędowych
spełniających równanie macierzowe
przedstawione zostanie dla modelu o dwóch stopniach swobody, pokazanego na rysunku
poniżej.
Warunkiem istnienia niezerowych rozwiązań ze względu na amplitudy , jest zerowanie się
wyznacznika głównego tego układu równań
skąd po przekształceniach otrzymuje się częstości drgań własnych modelu
Macierze bezwładności A i sztywności C
modelu
oraz macierz jednokolumnowa ampli-
tud współrzędnych uogólnionych
podstawia się do warunku istnienia drgań
własnych i otrzymuje układ s równań
algebraicznych jednorodnych

Pierwsza częstość własna układu niezamocowanego, „swobodnie pływającego” jest
zawsze równa 0 i odpowiada jej sztywny ruch układu. Istotną różną od zera jest druga
częstość własna . Po podstawieniu wyznaczonych częstości własnych do warunku
matematycznego istnienia drgań własnych otrzymuje się postacie drgań określone stosunkiem
amplitud współrzędnych, czyli określone z dokładnością do stałego czynnika
Program części doświadczalnej
1) Przeanalizować wspólnie z prowadzącym zajęcia redukcję układu napędowego do
modelu o sześciu stopniach swobody.
2) Określić adekwatny, z punktu widzenia podstawowej częstości drgań własnych,
model zastępczy układu o dwóch stopniach swobody i wyznaczyć analitycznie
jego częstości i postacie własne.
3) Przeanalizować wspólnie z prowadzącym zajęcia sposób modelowania układu
napędowego oraz wyznaczania częstości i postaci drgań własnych modelu za
pomocą programu NEi Nastran FEA.
4) Wyznaczyć częstości i postacie drgań własnych modelu układu napędowego o
sześciu stopniach swobody oraz porównać je z wartościami wyznaczonymi
analitycznie dla modelu o dwóch stopniach swobody.
5) Wykonać sprawozdanie z ćwiczenia.
Literatura podstawowa
1. Kaczmarek J.: Podstawy teorii drgań i dynamiki maszyn. WSM, Szczecin 2000 (str.
173÷184, 188÷189).
Literatura uzupełniająca
2. Adams V., Askenazi A.: Building Better Products with Finite Element Analysis.
OnWord Press, Santa Fe 1999.
3. Kruszewski J., Wittbrodt E.: Drgania układów mechanicznych w ujęciu
komputerowym. Zagadnienia liniowe. WNT, Warszawa 1992.
4. Przepisy Klasyfikacji i Budowy Statków Morskich PRS 1990 – tom 5, część VII:
Urządzenia maszynowe.
5. Publikacja PRS nr 2/I: Zapobieganie drganiom na statkach. Gdańsk 1988.
Schemat sprawozdania Wydział, rok, grupa , imię i nazwisko wykonującego sprawozdanie
1. Temat ćwiczenia.
2. Cel ćwiczenia.
3. Model stanowiska doświadczalnego o sześciu stopniach swobody i wartości jego
parametrów: mas i współczynników sztywności.
4. Model zastępczy układu o dwóch stopniach swobody adekwatny z punktu widzenia
podstawowej częstości drgań własnych i jej wartość wyznaczona analitycznie.
5. Wartości częstości i postacie drgań własnych modelu o sześciu stopniach swobody
wyznaczone programem NEi Nastran FEA.

Temat 7. Badania drgań skrętnych linii wałów układu
napędowego – badania doświadczalne.
Zagadnienia:
Budowa, zasada działania, czułość, zalety i wady tensometru
elektrooporowego
Metoda tensometrii elektrooporowej pomiaru częstości drgań
własnych, naprężeń skrętnych, momentu obrotowego i mocy w
wałach układu napędowego
Najczęściej stosowaną metodą pomiaru m.in. drgań skrętnych układów napędowych jest
metoda tensometrii elektrooporowej, stosunkowo tania i jednocześnie bardzo dokładna. Do
zamiany sygnału mechanicznego, w postaci odkształcenia badanej powierzchni wału, na
sygnał elektryczny, wykorzystuje się czujniki elektrooporowe: półprzewodnikowe
wprowadzone w latach 80-tych XX wieku oraz znacznie wcześniej drucikowe i foliowe. Tutaj
omówione zostaną powszechnie stosowane czujniki drucikowe.
Budowa, zasada działania, czułość, zalety i wady tensometru
elektrooporowego
Zmiana rezystancji R drutu oporowego jest proporcjonalna do względnej zmiany jego
długości a więc i względnego odkształcenia ε powierzchni elementu wzdłuż kierunku drutu
oporowego
gdzie k jest stałą (czułością) elementu wynoszącą od 1.8 dla tensometrów konstantanowych
do 3.6 dla tensometru platynowego. Najczęściej stała k wynosi około 2.
Czujnik elektrooporowy jest stosunkowo tani oraz bardzo lekki i nie zmienia praktycznie
masy elementu, dlatego może być naklejany na bardzo lekkie elementy, np. membrany,
powłoki.
Budowę czujnika drucikowego pokazano
na rysunku obok; 1 – podkładka izolacyjna, 2 –
drut oporowy z konstantanu niklu o rezystancji z
zakresu 100÷200 Ω i o średnicy z zakresu
0.03÷0.04 mm, 3 – połączenia drutu oporowego
z końcówkami zasilającymi, 4 – końcówki
przyłączy miedzianych o znacznie większej
średnicy niż średnica drutu oporowego.
Wydłużenie x powierzchni elementu, na
którą naklejono tensometr, przenosi się za
pośrednictwem kleju i podkładki izolacyjnej na
drut oporowy.

Metoda tensometrii elektrooporowej pomiaru częstości drgań własnych,
naprężeń skrętnych, momentu obrotowego i mocy w wałach układu
napędowego
Na wał napędowy nakleja się tensometry pod kątem 45⁰ do osi wału. Kierunek
naklejenia wynika z analizy odkształceń wału, obciążonego momentem skręcającym .
W kierunku prostopadłym lub równoległym do osi wału odkształcenia właściwe ε są
równe 0, a odkształcenie postaciowe γ czyli zmiana kątów maksymalna. W kierunku
nachylonym pod kątem 45⁰ do osi wału odkształcenie postaciowe γ jest zerowe (kąty nie
ulegają zmianie), a odkształcenie właściwe ε jest maksymalne.
Z teorii wytrzymałości materiałów wynika zależność między odkształceniami γ i ε na
powierzchni swobodnie skręcanego wału
oraz na podstawie uogólnionego prawa Hooke’a
wynika naprężenie tnące τ na powierzchni skręcanego wału
gdzie:
E – moduł sprężystości podłużnej Younga;
ν – współczynnik ściśliwości poprzecznej materiału, tzw. liczba Poissona;
dla stali: ; ; ν 0.3.
Na podstawie znajomości naprężeń tnących τ i średnicy wału d oraz prędkości kątowej
ω lub obrotowej n można określić moment M skręcający (napędowy) w wale i moc N na wale
Najczęściej do pomiaru drgań skrętnych wałów napędowych stosuje się, pokazany na
rysunku poniżej, układ pełnego mostka, złożony z czterech czujników czynnych .

1 – mostek Wheatstone’a, 2 – wzmacniacz pomiarowy, 3 – przetwornik A/C z analizatorem
częstotliwości FFT, 4 – rejestrator poziomu drgań; - względna zmiana napięcia mostka
Układ pełnego mostka zapewnia:
– kompensację wpływu temperatury,
– eliminacje naprężęń spowodowanych działaniem momentu gnącego i siły podłużnej,
– czterokrotne wzmocnienie sygnału pomiarowego w stosunku do układu z jednym tylko
czujnikiem czynnym.
Przekazanie sygnału z części obrotowej do układu pomiarowego odbywa się albo za
pośrednictwem czterech pierścieni ślizgowych i czterech szczotek zbierających (pokazanych
na rysunku powyżej lub na zdjęciu poniżej), albo za pośrednictwem bezstykowego systemu
nadajnik-odbiornik.
Poniżej pokazano zdjęcie badanego układu napędowego. Z prawej strony widoczny
silnik napędowy, z lewej – generator jednofazowy i pośrodku między pierwszym a drugim
sprzęgłem – pierścienie ślizgowe i szczotki zbierające sygnał z obrotowych części układu.

Program części doświadczalnej
1) Zapoznać się z budową stanowiska doświadczalnego i układem pomiarowym.
2) Określić cel i zakres pomiarów.
3) Uruchomić sposobem impulsowym drgania skrętne w wałach układu napędowego
i zarejestrować przebieg czasowy tych drgań za pomocą przetwornika A/C.
Poniżej pokazano przykładowy zapis w czasie rzeczywistym drgań skrętnych linii
wałów wzbudzonych sposobem impulsowym.
4) Dokonać analizy harmonicznej metodą FFT zarejestrowanego przebiegu drgań
skrętnych wału i określić na podstawie widma drgań częstotliwości drgań
własnych układu.
Poniżej pokazano widmo sygnału o przebiegu czasowym przedstawionym
powyżej.
5) Porównać doświadczalne wartości częstotliwości drgań własnych układu z
wartościami wyznaczonymi numerycznie w ćwiczeniu 6.
6) Wykonać sprawozdanie z ćwiczenia.

Literatura podstawowa
1. Kaczmarek J.: Podstawy teorii drgań i dynamiki maszyn. WSM, Szczecin 2000
(str. 190÷196).
Literatura uzupełniająca
2. Niezgodziński M. E., Niezgodziński T.: Wytrzymałość materiałów. Wydawnictwa
Naukowe PWN, Warszawa 2006.
3. Roliński Z.: Tensometria oporowa. WNT, Warszawa 1981.
4. Przepisy Klasyfikacji i Budowy Statków Morskich PRS 1990 – tom 5, część VII:
Urządzenia maszynowe.
Schemat sprawozdania
Wydział, rok, grupa , imię i nazwisko wykonującego sprawozdanie
1. Temat ćwiczenia.
2. Cel ćwiczenia.
3. Schemat stanowiska doświadczalnego i układu pomiarowego.
4. Przebieg czasowy wzbudzonych impulsowo drgań skrętnych linii wałów i widmo
drgań.
5. Wartości doświadczalne częstotliwości drgań skrętnych linii wałów.
6. Porównanie częstotliwości drgań własnych linii wałów wyznaczonych teoretycznie i
doświadczalnie.
![Opis pr]edmiotu: Elektrotechnika III€¦ · Treść ćwiczeń laboratoryjnych: Badanie obwodów liniowych prądu stałego. Badanie elementów nieliniowych (prądu stałego i przemiennego)](https://img.dokumen.tips/doc/110x75/5f0bbf2b7e708231d4320421/opis-predmiotu-elektrotechnika-iii-tre-wicze-laboratoryjnych-badanie.jpg)




























