Embed Size (px)
DESCRIPTION
Team: Anchit Navelkar- IIT Kharagpur
Citation preview

MECHANICAL DESIGN : OVERHAUL
Driving Mechanism
Gripper Participant’s Name:Anchit Navelkar Name of College:IIT Kharagpur
MECHANICAL DESIGN REPORT
Chassis Design:
A basic differential driving mechanism
Metal/Wooden body
Caterpillar Tracks used for traversing on sandy and pebbles terrain
Gripper with arm attached to circular moving platform on robot
Mechanisms Used:
Differential Drive with caterpillar tracks
Gripping Mechanism
Moving Arm Mechanism for Gripper
Rotating Mechanism for Gripper
Traversal & Gripper:
Components Used
4 Large wheels(to be connected with the motors)
2 DC motors, 60-100 RPM
2 caterpillar tracks
4 small wheels to be attached at the ends of the caterpillar tracks to give the track an angle
at the ends
4 Servo motors
Gripper
2 metal/wooden shafts

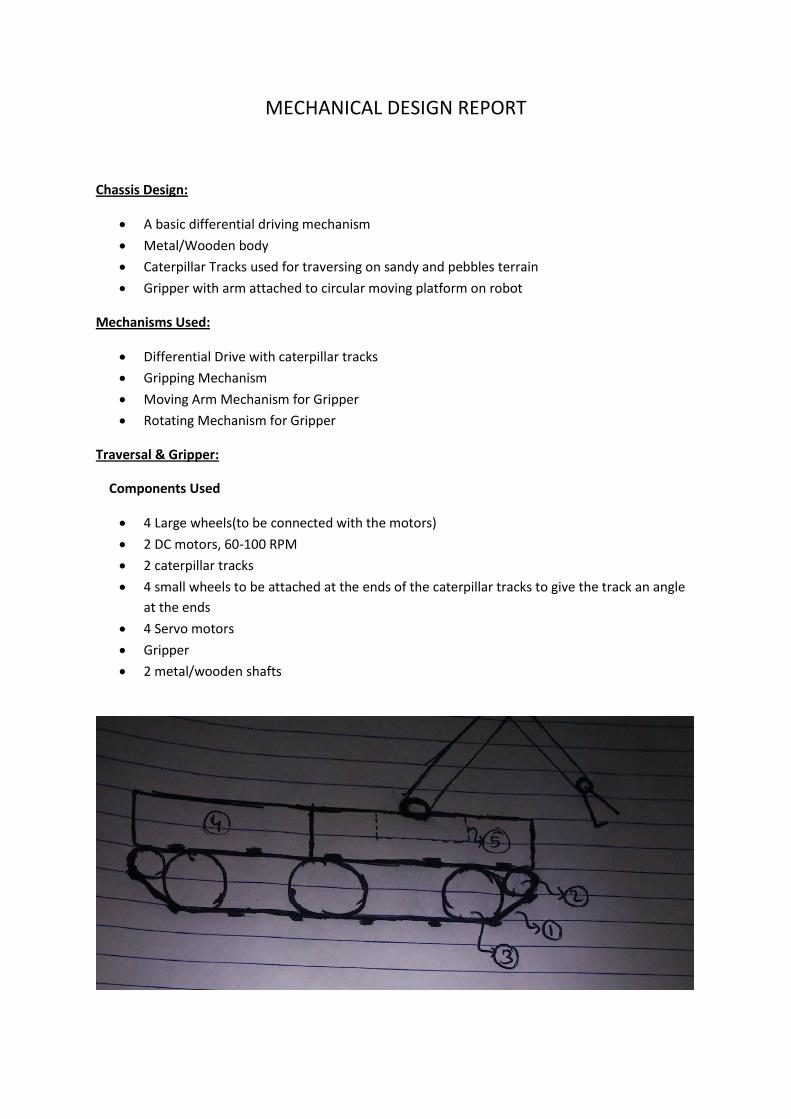
1-Caterpillar Tracks
Caterpillar tracks give extra grip and enable locomotion on sandy/pebbles terrains.
2-Small Wheels
This helps to make the track inclined to the vertical at the ends so that it grips on a sudden
elevation.
3-Large wheels connected to motors
4-Compartment for keeping the victims
5-Circular platform to which the base of the arm is connected
(i)-Circular platform having ability to rotate about the vertical (y) axis serving as the base of the arm.
It is connected to a servo motor.
(ii)-Motor for controlling arm to move forward or backward i.e. capable of rotating about the (z) axis.
It will be a servo motor.
(iii)-Same as motor (ii)
(iv)-Motor for controlling the lower jaw of the clipper, again being a servo motor
Victim and bridge can be lifted by same mechanism.

The gripper picks up the victims, then the arm moves such that it is above the compartment on the
chassis
Jaw opened to drop victims in the
compartment.





























