Embed Size (px)
DESCRIPTION
Team Members: Minali Upreti- LNMIIT, Jaipur Niyati Tiwari- LNMIIT, Jaipur Ratika Garg- LNMIIT, Jaipur
Citation preview
OVERHAUL: MECHANICAL DESIGN|IIT KGP
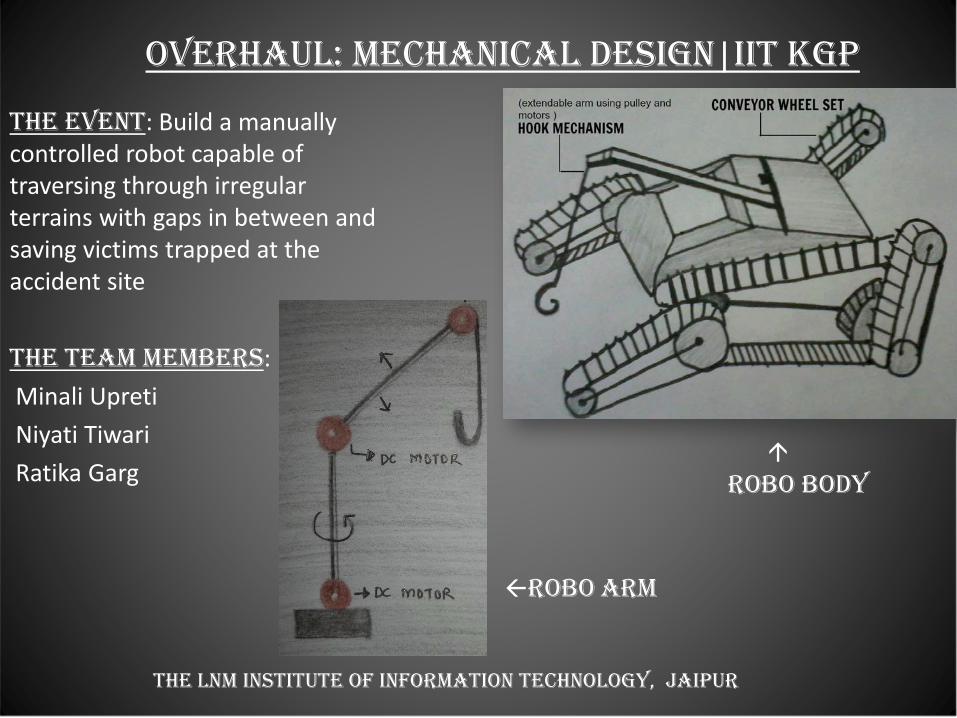
THE EVENT: Build a manually controlled robot capable of traversing through irregular terrains with gaps in between and saving victims trapped at the accident site
THE TEAM MEMBERS: Minali UpretiNiyati TiwariRatika Garg
THE LNM INSTITUTE Of INfORMATION TECHNOLOGy, JAIPUR
ROBO ARM
ROBO BODy

OVERHAUL : MECHANICAL DESIGN REPORT
CHASIS DESIGN
: A basic metal DIFFERENTIAL DRIVE is used with CONVEYOR BELTS enabling the robot to traverse across the ROUGHEST and TOUGHEST terrains.
This chasis has an edge over the others as it is equipped with 4 EXTRA CONVEYOR BELTS than the usual.
This kind of the design would help the bot traverse across crevasses, where the normal tyres would get struck
COMPONENTS USED
1. 2 set of conveyor wheels (long)
:
2. 4 set of conveyor wheels( short) 3. 3 dc motors (10/5rpm) 4. 4 dc motors (300 rpm)

GRASPING AND LIFTING MECHANISM :
HOOK MECHANISM :
is used to pick up the bridging parts and objects(victim)
The Lower part of the arm will help the arm in sideways movements.
The middle part will help it with upward and downward movements.
The pulley after this part is connected with a motor, rotating it in either directions and will make the hook go up and down, thus helping in lifting objects.

1. 3 DC motors
COMPONENTS FOR GRASPING AND LIFTING :
2. Hook 3. Pulley 4. Rope
1. MINALI UPRETI
CREATED BY :
2. NIYATI TIWARI 3. RATIKA GARG
The LNM Institute of information technology, jaipur






























