Embed Size (px)
Citation preview

1/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Mecánica del VueloTema 8: Estabilidad Estática y Control: Movimiento
Lateral-Direccional
Damián Rivas Rivas y Sergio Esteban Roncero
Departamento de Ingeniería AeroespacialEscuela Técnica Superior de Ingeniería, Universidad de Sevilla
Curso 2013-2014
Rivas & Esteban MVI

2/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Outline
1 Introducción
2 Fuerzas y Momentos
3 Coeficientes Asociados a la Fuerza Lateral
4 Coeficientes Asociados a los Momentos
5 Estabilidad Estática Lateral-Direccional
6 Control Lateral-Direccional en Vuelos No Simétricos
Rivas & Esteban MVI

3/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Outline
1 Introducción
2 Fuerzas y Momentos
3 Coeficientes Asociados a la Fuerza Lateral
4 Coeficientes Asociados a los Momentos
5 Estabilidad Estática Lateral-Direccional
6 Control Lateral-Direccional en Vuelos No Simétricos
Rivas & Esteban MVI

4/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Introducción - I
Si estamos en la condición de referencia básica: Movimiento uniforme yrectilíneo⇒ todas las variables laterales-direccionales son nulas.Esto se traduce en que no es necesario un equilibrado.
No existe un problema primario de equilibrado del avión.
Es necesario equilibrado cuando no se tenga simetría:en la geometría (másica).aerodinámica.propulsiva.
Blohm & Voss BV 141 B-0
Scaled Composites 202 Boomerang AD-1 (Ames-Dryden) 1
Rivas & Esteban MVI

5/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Introducción - II
Desde el punto de vista del control, todo el problema lateral-direccionalva a englobar:
Equilibrado secundario (cuando proceda).Necesidad de vuelo no simétrico:
Fallo en 1 motorVuelo con viento cruzado
Al principio del curso se supuso que el CG estaba en el plano desimetría.
Esto implica que la posición que ocupa el CG no influye en el problemalateral-direccional.
Estas son las grandes diferencias básica con el problema longitudinal:No existe el problema de equilibradoCG no influye
Se requiere la definición del sistema de ejes estabilidad:Es un sistema de ejes cuerpoxs - según el vector velocidad en la condición de vuelo (simétrico) dereferencia
Cómo se efectua el control?Control lateral: alerón, spoiler, etcControl direccional: timón de dirección, etc
Rivas & Esteban MVI

6/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Introducción - III
Definición del sistema de ejes estabilidad.
Rivas & Esteban MVI

7/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Introducción - IV
Definición del sistema de ejes estabilidad.
Rivas & Esteban MVI

8/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire F y M
Outline
1 Introducción
2 Fuerzas y MomentosFuerzas y Momentos - Introducción
3 Coeficientes Asociados a la Fuerza Lateral
4 Coeficientes Asociados a los Momentos
5 Estabilidad Estática Lateral-Direccional
6 Control Lateral-Direccional en Vuelos No Simétricos
Rivas & Esteban MVI

9/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire F y M
Fuerzas y Momentos - Introducción - I
Fuerzas y momentos.
Fuerza Lateral: YMomento de Balance: LMomento de Guiñada: N
Cy = Y12 ρV 2S
, Cl =L
12 ρV 2Sb
, Cn = N12 ρV 2Sb
Todos estos coeficientes son 0 si estamos en un vuelo simétrico
La única forma de que no sea 0 es que haya alguna actuaciónlateral-direccional
Con un análisis dimensional se llega a:
Cy ,Cl ,Cn = f (α, β, δa, δr ,M,Re)
Se empleará una teoría linealizada, suponiendo pertubacionespequeñas.
Antes de plantear la teoría linealizada ⇒ definir criterio de signos
Rivas & Esteban MVI

10/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire F y M
Fuerzas y Momentos - Criterio de Signos
Estabilizador
Vertical
Y
Momento
Resultante
Ny
Criterio de signos para las superficiesde control:
Deflexión de aleron: δa
δa > 0 ⇒ L > 0Alerón izquierdo baja y Alerónderecho sube
Deflexión del timón de dirección: δr
δr > 0 ⇒ N > 0δr > 0 da un Y < 0 y N > 0
Rivas & Esteban MVI

11/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire F y M
Fuerzas y Momentos - I
Se va a suponer la teoría linealizada:
Cy = Cy0 + Cyββ + Cyδaδa + Cyδr
δr
Cl = Cl0 + Clββ + Clδaδa + Clδr
δr
Cn = Cn0 + Cnββ + Cnδaδa + Cnδr
δr
Todas serán en general función de α,M,Re formalmente, pero no sevan a considerar tales dependencias.
La dependencia puede apreciarse con el siguiente ejemplo:
A α ↑ el control se ve seriamente comprometido ya que la cola quedadentro de la estela
Aunque los coeficientes f (α,Re,M), en lo que sigue no se considerará.
Rivas & Esteban MVI

12/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire F y M
Fuerzas y Momentos - II
En un avión simétrico tenemos que: Cy0 = Cl0 = Cn0 = 0Los coeficientes asociadas a los momentos:
Clβ : Efecto diedro (derivada de estabilidad)Clδa
: Potencia de control lateralClδr
: Derivada cruzada
Cnβ : Índice de estabilidad estática lateral (derivada de estabilidad)Cnδa
: Guiñada adversa (derivada cruzada)Cnδr
: Potencia de control direccional
Rivas & Esteban MVI

13/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire CF
Outline
1 Introducción
2 Fuerzas y Momentos
3 Coeficientes Asociados a la Fuerza LateralCoeficientes Asociados a la Fuerza Lateral
4 Coeficientes Asociados a los Momentos
5 Estabilidad Estática Lateral-Direccional
6 Control Lateral-Direccional en Vuelos No Simétricos
Rivas & Esteban MVI

14/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire CF
Coeficientes Asociados a la Fuerza Lateral Cyβ
Cyβ : El efecto del fuselaje y del ala son pequeños
Hipótesis: sólo influye el estabilizador vertical
Cyβ =(
Cyβ
)
w+
(
Cyβ
)
f+
(
Cyβ
)
v⇒ Cyβ ≈
(
Cyβ
)
v
αv = β − σ = β − dσdβ β = β
(
1 − dσdβ
)
σ: ⇒ Deflexión de la estela del ala
Yv = − 12ρV 2
v Sv Cv ⇒
{
Cv = avαv
αv = β(
1 − dσdβ
)
⇓
Yv = − 12ρV 2
v Sv avβ(
1 − dσdβ
)
adimensionalizando ⇒Yv
12 ρV 2S
= −(
VvV
)2 SvS av
(
1 − dσdβ
)
β
ηv =(
VvV
)2⇒
(
Cyβ
)
v= −ηv
Sv
Sav
(
1 −dσ
dβ
)
β < 0
Rivas & Esteban MVI

15/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire CF
Coeficientes Asociados a la Fuerza Lateral Cyδay Cyδr
Cyδa: Fuerza lateral ⇒ δa
Deflexión de los alerones no nos va a dar unafuerza lateral
Cyδa= 0
Esto es válido, a menos que los alerones esténmuy próximos al estabilizador vertical
Cyδr: Fuerza lateral ⇒ δr
∆αv = τv δr ⇒
{
transformamos δr ⇒ ∆αvτv ⇒ efectividad del timón de dirección
∆Y = − 12ρV 2
v Sv av∆αv ⇒ ∆Y = − 12ρV 2
v Sv avτvδr
⇓
Cy = −(
VvV
)2 SvS avτvδr ⇒ ηv =
(
VvV
)2⇒ Cyδr
= −ηvSv
Savτv < 0
Rivas & Esteban MVI

16/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire CF
Efectividad del Timón de Dirección - τv
Al producirse una deflexión del timón de dirección δr :
Similar al timón de profundidad
∆αv ⇒ incrementeo de ángulo de ataque obtenido al deflectar δr
Se traduce la deflexión a un incremento de ángulo de ataque ∆αv
De modo que dado un δr ⇒ ∆αv = τvδr
τv =∆αv
δr⇐ suele obtenerse experimentalmente
Rivas & Esteban MVI

17/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Outline
1 Introducción
2 Fuerzas y Momentos
3 Coeficientes Asociados a la Fuerza Lateral
4 Coeficientes Asociados a los MomentosCoeficientes de Momento de BalanceCoeficientes de Momento de Guiñada
5 Estabilidad Estática Lateral-Direccional
6 Control Lateral-Direccional en Vuelos No Simétricos
Rivas & Esteban MVI

18/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - I
Coeficientes de Momento de Balance:
Cl = ��✒0
Cl0 + Clββ + Clδaδa + Clδr
δr
Clβ : Efecto Diedro
Es uno de los parámetros más importante de la estabilidadlateral-direccional
Criterio de estabilidad ⇒ Clβ < 0
No quiere decir que cuanto más negativo mejor, ya que puede tenerefectos contraproducentes
La contribución del Clβ se divide en ala-fuselaje, estabilizadorhorizontal, y estabilizador vertical:
Clβ =(
Clβ
)
wb+
(
Clβ
)
h+
(
Clβ
)
v
Rivas & Esteban MVI

19/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - II
(
Clβ
)
wb: Contribución del conjunto ala-fuselaje:
Se considera 3 efectos:diedro geométrico del alaflecha del alaposición del ala respecto del fuselaje
Diedro geométrico del ala Γ :El efecto del diedro es la mayor contribución del alaEn la componente perpendicular existe una asimetríaEl ángulo de diedro tiene un efecto estabilizador manteniendo elavión nivelado al producirse un deslizamiento lateral.
Rivas & Esteban MVI
20/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - III
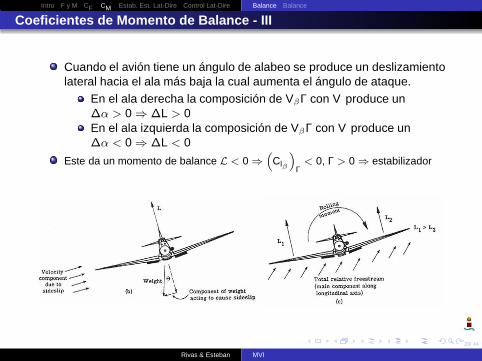
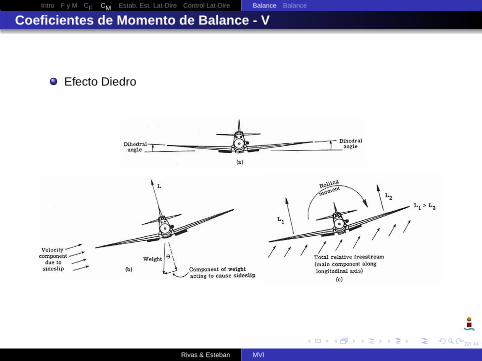
Cuando el avión tiene un ángulo de alabeo se produce un deslizamientolateral hacia el ala más baja la cual aumenta el ángulo de ataque.
En el ala derecha la composición de VβΓ con V produce un∆α > 0 ⇒ ∆L > 0En el ala izquierda la composición de VβΓ con V produce un∆α < 0 ⇒ ∆L < 0
Este da un momento de balance L < 0 ⇒(
Clβ
)
Γ< 0, Γ > 0 ⇒ estabilizador
Rivas & Esteban MVI

21/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - IV
Efecto Diedro
Rivas & Esteban MVI
22/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - V
Efecto Diedro
Rivas & Esteban MVI

23/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - VI - Efecto Flecha del Ala
Efecto de la flecha del Ala:Hay una asimetría en la velocidad normal al ala
(V )right > (V )left ⇒ (L)right > (L)left ⇒ L < 0 ⇒(
Clβ
)
Λ< 0
Λ > 0 genera un efecto estabilizador
Right
Wing
Left
Wing
Rivas & Esteban MVI

24/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - VII - Posición ala-fusel aje
Influencia de la ubicación del ala
High Wing
cylincder
(fuselage)
streamlines
Cro
ss F
low
wing
region
Low Wing
wing
region
cylincder
(fuselage)
streamlines
Cro
ss F
low
Ala elevada (vista frontalmente):el flujo cruzado de la derechaaumenta ∆α > 0.el flujo cruzado de la izquierdadisminuye ∆α < 0.Se general un par de balancenegativo Clβ < 0Efecto estabilizador
Ala baja (vista frontalmente):
el flujo cruzado de la derechadisminuye ∆α < 0.el flujo cruzado de la izquierdadisminuye ∆α > 0.Se general un par de balancepositivo Clβ > 0Efecto desestabilizadorAviones de ala baja utilizan el diedropara compensar el Clβ > 0
Rivas & Esteban MVI

25/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - VIII - Estabilizador Ver tical(
Clβ
)
H: Estabilizador horizontal: contribución análoga, pero
comparativamente menor(
Clβ
)
V: Estabilizador Vertical
Posición del estabilizador horizontal (cola en T) hv
Rivas & Esteban MVI

26/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - IX - Estabilizador Verti cal - I
Estabilizador Vertical
β > 0 ⇒ hv > 0 ⇒ Yv < 0 ⇒ L = Yv hv < 0
⇓
Yv = 12ρV 2
v Sv avβ(
1 − dσdβ
)
⇐ adimensionalizar ⇒ 12ρV 2S
⇓(
Cyβ
)
v= −ηv
SvS av
(
1 − dσdβ
)
⇓
substituyendo ⇒(
Clβ
)
v=
(
Cyβ
)
v
hvb
⇓(
Clβ
)
v= −ηv
SvS av
(
1 − dσdβ
)
hvb
hv > 0 ⇔ (za,c)v < 0 ⇒(
Clβ
)
v< 0 ⇒ efecto estabilizador
Rivas & Esteban MVI

27/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - X - Estabilizador Vertic al - II
La distancia hv = hv (α), y se da el caso (en aviones militares), que si α es
grande, el coeficiente puede cambiar de signo ((
Clβ
)
v> 0) ⇒ por lo tanto
cambiar el carácter (estabilizador o desestabilizador) cualitativo
Rivas & Esteban MVI

28/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - XI - Estabilizador Horiz ontal - I
Posición del estabilizador horizontal: cola en T
En la configuración convencional, debido a los efectos de punta de ala yque las presiones 0+ ⇒ 0−
En la configuración en T, al no tener que ir a 0+ la distribución depresiones, es más llena.
av ⇒ mayor ⇒ Yv ⇒ mayor ⇒(
Clβ
)
v> 0
-+
+
Rivas & Esteban MVI

29/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - XII - Estabilizador Hori zontal - II
Efecto adicional:
Depresión en el estabilizador verticalSobrepresión en el estabilizador vertical
L < 0 ⇒(
Clβ
)
v< 0 ⇒ Efecto Estabilizador
-+
Por esa razón se encuentran configuraciones de ala en T (muy estabilizadora)con ala alta y diedro negativo
Rivas & Esteban MVI

30/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - XIII
Clδa: Potencia de control lateral
δa > 0 ⇒ L > 0 ⇒ Clδa> 0
Clδr: Derivada cruzada
δr > 0 ⇒ ∆Y < 0 ⇒ L = ∆Yhv < 0
CYδr= −ηv
SrS avτv ⇒ Clδr
= CYδr
hvb ⇒ Clδr
= −ηvSr
Savτv
hv
b
Rivas & Esteban MVI

31/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Balance - XIV
Momento de balance del F-16: Datos de túnel aerodinámico
Rivas & Esteban MVI

32/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Guiñada - I
Coeficientes de Momento de Guiñada:
Cn =✚✚❃0
Cn0 + Cnββ + Cnδaδa + Cnδr
δr
Cnβ : Índice de estabilidad estática direccional
Criterio de estabilidad ⇒ Cnβ > 0
La contribución del Clβ se divide en ala-fuselaje,estabilizador vertical y hélice
Cnβ =(
Cnβ
)
wb+
(
Cnβ
)
v+
(
Cnβ
)
hlice
Rivas & Esteban MVI

33/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Guiñada - II(
Cnβ
)
wb: Contribución del conjunto ala-fuselaje:
Se considera 3 efectos:diedro geométrico del alaflecha del alaposición del ala respecto del fuselaje
Efecto de la Flecha del Ala: Principal efecto:Hay una asimetría en la velocidad normal al ala ⇒ asimetría en laresistencia inducida
(V )right > (V )left ⇒ (L)right > (L)left ⇒ (Di )right > (Di)left
Λ > 0 ⇒ N > 0 ⇒ Cnβ > 0 ⇒ Efecto estabilizador
Right
Wing
Left
Wing
Rivas & Esteban MVI

34/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Guiñada - III
Right
Wing
Left
Wing
(
Cnβ
)
v: Contribución del estabilizador
vertical:
β > 0 ⇒ Yv < 0 ⇒ N = Yv lv > 0
⇓
Yv = − 12ρV 2
v Sv avβ(
1 − dσdβ
)
⇓(
Cyβ
)
v= −ηv
SvS av
(
1 − dσdβ
)
⇓(
Cnβ
)
v= −
(
Cyβ
)
v
lvb
⇓
(
Cnβ
)
v= ηv
Sv
Sav
(
1 −dσ
dβ
)
lvb
> 0
Con un ángulo de ataque grande, estaderivada puede cambiar principalmente porque varía lv
Rivas & Esteban MVI

35/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Guiñada - IV
(
Cnβ
)
hlice: Hélice tractora
La hélice tiende a enderezar el aire,El aire reacciona dando lugar a unafuerza lateralN < 0 ⇒
(
Cnβ
)
hlice< 0 ⇒ Efecto
desestabilizadorEs muy importante en avionetaspequeñasEn teoría este efecto también sedaría en motores a reacción, ya queen el fondo también enderezan lacorriente.
Rivas & Esteban MVI

36/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Balance Balance
Coeficientes de Momento de Guiñada - V
(
Cnδa
)
v: Guiñada adversa (derivada cruzada)
δa > 0 ⇒
{
.∆Lleft > 0∆Lright < 0
}
⇒ (Di)left > (Di )right
∆D ⇒ N < 0 ⇒ Cnδa< 0
Esto se suele evitar mediante soluciones mecánicas de diseño deforma que la Dright aumente algo más.
(
Cnδr
)
v: Potencia de control direccional
δr > 0 ⇒ ∆Y < 0 ⇒ N = −∆Ylv > 0
Cyδr= −ηv
SvS avτv ⇒ Cnδr
= −Cyδrlvb
⇓
Cnδr= ηv
Sv
Savτv
lvb
⇒ Cnδr> 0
Rivas & Esteban MVI

37/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Outline
1 Introducción
2 Fuerzas y Momentos
3 Coeficientes Asociados a la Fuerza Lateral
4 Coeficientes Asociados a los Momentos
5 Estabilidad Estática Lateral-Direccional
6 Control Lateral-Direccional en Vuelos No Simétricos
Rivas & Esteban MVI

38/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire
Estabilidad Estática Lateral-Direccional - I
Criterio de estabilidad estática direccional: Cnβ> 0
Perturbación β(+)Hace faltan un N > 0 para que el avión se alinee con la corrienteincidente ⇒ momento recuperadorEl estabilizador vertical tiende a hacer que el avión gire y se alineecon la corriente
Criterio de estabilidad estática lateral: Clβ < 0No es directamente un criterio de estabilidad sino que es unaconsecuencia del problema dinámico que se generaNo hay un momento recuperador cuando se tiene una perturbaciónque haga que µ > 0 es decir no existe Clµ
Qué ocurre cuando µ+
Cae el ala derecha, por lo que aparece una fuerza lateral Y > 0 loque produce una V > 0 ⇒ el avión se mueve hacia la derechaEl aire le entra por la derecha al ala, por lo que β > 0Para recuperarse lo que aparece es un Clβ < 0 ⇒ ∆Cl = Clββ < 0⇐ Momento recuperador
Rivas & Esteban MVI

39/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Control Lat-Dire
Outline
1 Introducción
2 Fuerzas y Momentos
3 Coeficientes Asociados a la Fuerza Lateral
4 Coeficientes Asociados a los Momentos
5 Estabilidad Estática Lateral-Direccional
6 Control Lateral-Direccional en Vuelos No SimétricosControl Lateral-Direccional en Vuelos No Simétricos
Rivas & Esteban MVI
40/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Control Lat-Dire
Control Lateral-Direccional en Vuelos No Simétricos - I
El control lateral direccional no es necesario en vuelo simétrico
Si el vuelo no es simétrico , será necesario estudiar cual tendrá que serla deflexión de las superficies de control para que haya vueloequilibrado.
Se considerarán 2 casos de vuelo no simétrico:
Vuelo con resbalamientovuelo con fallo de un motor
Rivas & Esteban MVI

41/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Control Lat-Dire
Control Lateral-Direccional en Vuelos No Simétricos - II
El vuelo con resbalamiento:
Es deseable volar así cuando se tiene que aterrizar o despegarcon viento curzadoHay que deflectar el δr para tener un Cnδr
δr que compense el Cnββ
Una primera aproximación, sin tener en cuenta el problema deacople lateral se puede obtener a partir de:
β > 0 ⇒ N = 0 ⇒ Cnββ + Cnδrδr = 0 ⇒ δr = −
Cnβ β
Cnδr
Rivas & Esteban MVI

42/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Control Lat-Dire
Control Lateral-Direccional en Vuelos No Simétricos - III
Teniendo en cuenta el problema lateral: Ecuaciones de equilibrio
ΣY = 0L = 0N = 0
⇒
{
ys ⇒ W sinµ+ Y = 0zs ⇒ W cosµ− L = 0
⇒ tanµ = − YL ⇒ Y = −L tanµ
⇓
Cy = −CL tanµ
Cl = 0Cn = 0
En general ⇒ µ ≪ 1 ⇒ Cy = −CLµ and Cl = Cn = 0
Cyββ + Cyδrδr + Cyδa
δa = −CLµ
Clββ + Clδrδr + Clδa
δa = 0Clββ + Clδr
δr + Clδaδa = 0
⇒
{
incognitas :δr , δa, µ
dato :β
CL CyδrCyδa
0 ClδrClδa
0 CnδrCnδa
µ
δrδa
= −
CyβClβCnβ
β ⇒ −A−1b =
dµdβdδrdβdδadβ
Derivadas de Sensibilidad
Rivas & Esteban MVI

43/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Control Lat-Dire
Control Lateral-Direccional en Vuelos No Simétricos - IV
Vuelo on fallo de motor
N = Tyeng ⇒ Cneng = T12 ρV 2S
yengb
Una primera aproximación, sin tener en cuenta el problema de acoplelateral se puede obtener a partir del hecho que el momento lo ha decompensar el timón de dirección:
β = 0 ⇒ N 6= 0 ⇒ Cneng + Cnδrδr = 0 ⇒ δr = −
Cnengβ
Cnδr
En general ⇒ µ ≪ 1 ⇒ Cy = −CLµ y Cl = 0 y Cn = Cneng
Cyββ + Cyδrδr + Cyδa
δa = −CLµ
Clββ + Clδrδr + Clδa
δa = 0Clββ + Clδr
δr + Clδaδa = −Cneng
⇒
{
incognitas :δr , δa, β
dato :µ ⇒ según normatiba µMAX = 5◦
Cyβ CyδrCyδa
Clβ ClδrClδa
Cnβ CnδrCnδa
β
δrδa
= −
CLµ
0Cneng
⇒ −A−1b =
β
δrδa
Derivadas de Sensibilidad
Rivas & Esteban MVI

44/ 44
Intro F y M CF CM Estab. Est. Lat-Dire Control Lat-Dire Control Lat-Dire
References I
[MVI ETSIA 2003] J.J. Martínez García y M.A. Gómez Tierno, Apuntes deMecánica del Vuelo I, ETSIA, 2003
[Vinh 1993] Nguyen X. Vinh, Flight Mechanics of High-Performance Aircraft,Cambridge University Press, 1993
[Hull 2007] David G. Hull, Fundamentals of Airplane Flight Mechanics,Springer-Verlag, 2007
[Asselin 1997] Mario Asselin, An Introduction to Aircraft Performance, AIAAEducation Series, 1997.
[Pamadi 2004] Bandu N. Pamadi, Performance, Stability, and Control ofAirplanes, 2nd Edition, AIAA Education Series, 2004.
Rivas & Esteban MVI





























