Embed Size (px)
Citation preview

Journal of Applied Ecology
2001
38
, 879–887
© 2001 British Ecological Society
Blackwell Science, LtdOxford, UKJPEJournal of Applied Ecology0021-8901British Ecological Society, 20013832001615Measuring range to cetaceansJ. Gordon
INNOVATIONS
000000Graphicraft Limited, Hong Kong
Measuring the range to animals at sea from boats using photographic and video images
JONATHAN GORDON
Wildlife Conservation Research Unit, University of Oxford, Department of Zoology, South Parks Road, Oxford OX1 3PS, UK
Summary
1.
Estimating range to objects at sea by eye is notoriously difficult yet there are manyoccasions in management and research when accurate measures of range are required.
2.
A new method is described in which range is calculated from the angle subtendedbetween the horizon and the waterline of the object measured from single video orphotographic images taken at a known elevation. Possible errors are explored and prac-tical analysis methods outlined. Images can be collected and analysis performed usingrelatively inexpensive standard equipment.
3.
In offshore waters, uncertainty in the height of the camera and target object due tothe effects of waves and swell are likely to be the most significant sources of error. Theeffects of errors in camera height on ranges calculated using this method are approxim-ately proportional to the ratio of the height error to camera height. Simulations indicatethat wave- and swell-induced errors in the height of both object and camera will leadto range estimates with a standard deviation (SD) of 0·5
×
(error due to wave height) /(camera height).
4.
Three trials were conducted in which ranges (out to 2000 m) measured using thismethod were compared with those determined using alternative methods ( laser range-finding binoculars or non-differential global positioning system). Mean percentagediscrepancies in range measurements between the two methods varied from 6·4% to 2·6%,while the SD of discrepancies in trials varied between 6·5% and 4·3%. The independentrange measuring methods used here were not without error, however, and it is sug-gested that a mean absolute error of > 2% is an appropriate figure for the video method.
5.
Field tests indicated that the necessary photos or video sequences could be collectedfrom most types of cetaceans in the field. A variety of applications for the methodduring activities such as line transect surveys, mitigation monitoring and behaviouralstudies are suggested and discussed.
Key-words
: cetacean, line transect, mitigation, photogrammetry, range-finding.
Journal of Applied Ecology
(2001)
38
, 879–887
Introduction
There are many situations in marine and aquatic wild-life management in which it is necessary to measure therange to animals or objects seen floating at the water’ssurface. One of the most obvious is during abundancesurveys of marine mammals or swimming birds usingdistance-sampling techniques, such as line transect sur-veys (Buckland
et al
. 1993). Other applications include
measuring ranges to animals during behavioural studiesor as part of mitigation requirements (for example deter-mining whether animals are too close during poten-tially harmful activities such as seismic surveys) andmeasuring the shape and extent of flocks of swimmingbirds or floating objects such as oil slicks.
Estimating distance at sea by eye is notoriously dif-ficult but one straightforward method for determiningthe range to objects at the surface is to measure the anglesubtended between the waterline of an object and thehorizon, when viewed from a known elevated height.Navigators have used this technique for centuries, mak-ing accurate angular measurements using instrumentssuch as sextants. This approach is now well established
Present address and correspondence: Jonathan Gordon, SeaMammal Research Unit, Gatty Marine Laboratory, Univer-sity of St Andrews, St Andrews, Fife KY16 8LB, UK (fax01334 462632; e-mail [email protected]).
JPE615.fm Page 879 Saturday, July 14, 2001 4:40 PM

880
J. Gordon
© 2001 British Ecological Society,
Journal of Applied Ecology
,
38
,879–887
with cetacean and sea bird field researchers. Gordon(1990) provides a derivation for an equation relatingangle below the horizon to range from first principles(see the Methods), while Lerczack & Hobbs (1998) reviewthis and other equations for estimating range, includingthose for cases where a shoreline rather than a horizonis in view behind the object in question.
Measuring the angle between the horizon and theobject’s waterline can be difficult from a boat at sea.Sextants are not suitable when the target is difficult tosee and is only fleetingly visible, as is the case with a sur-facing cetacean. Boat-based biologists have employeda variety of less sophisticated instruments to make thesemeasurements, including sightings sticks (markingson which correspond to particular angles when heldat a certain distance from the eye), vernier callipersheld at an arm’s length (Heinemann 1981) and reticulebinoculars (Thompson & Hiby 1985). However, theprecision of these instruments is limited and it isdifficult to make accurate measurements on small,fleetingly visible, animals from moving vessels at sea(J. Gordon, personal observation). The required anglescan, however, be readily measured from photographicor video images that show both the target object andthe horizon. In this study, some of the probable errorsin techniques based on horizon angle measurementswere explored, trials carried out using photographicand video cameras to measure range, some simplemethods for analysing these images investigated, andpractical field applications suggested.
Methods
To measure range using this method it is essential toacquire images that show the animal or object of inter-est at the surface with the horizon (or a known shore-line) also in view. The height at which each photographwas taken is required, and this can most easily beachieved by taking photographs only from positionson the vessel of a known height. Most of the imagesanalysed for this paper were taken from crows’ nests atheights of around 13 m on the masts of 14–17-m motorsailing vessels. Heights, to the nearest centimetre, weremarked on the side of the mast so that the photographercould confirm the camera height after each image hadbeen taken. Attention should be paid to the effectsthat changes in ballast and in fuel and water suppliescould have on the waterline of the observation vessel.Any substantial heel at the time that the image is takencould lead to errors (heel reduces camera height in pro-portion to the cosine of the angle of heel). Heel can bemeasured, for example, by taking a simultaneous imageof the horizon with a rigidly mounted forward-lookingcamera, or using an electronic tilt-measurement device,and its effect on camera height can then be allowed for.
Fixed focal length lenses of between 100 and 400 mmwere used with 35-mm cameras to take range-measuring
photographs. The exact focal lengths of all of the lensesused were measured by taking photographs of known-sized objects at known ranges. Ilford
XP2 400 ASAfilm (Ilford Imaging, Knutsford, Cheshire, UK) wasa preferred film type as it combined high sensitivity withacceptably fine grain size.
A variety of domestic camcorders has been used tomake video recordings for range estimation, and goodresults have been obtained with SVHS, Hi8 and DVformats. Digital formats have higher acuity and givesuperior results. A progressive scan facility is useful forobtaining the highest resolution non-interlaced images.A high shutter speed should be chosen, automaticfocusing should be turned off and if the camera hasdigital zoom this must be disabled. Optical image stab-ilization should be used where available. To assist withlater analysis, cameras should have data backs, andvideos should be time-stamped and a commentaryshould be spoken onto the audio channel.
Most domestic camcorders are equipped with a zoomlens. When using these camcorders the focal lengthof the lens can be adjusted to suit the range to the targetobject but it is important that it should not be alteredduring range measuring sequences, and images tocalibrate the lens must be taken after each measuringsequence. Calibrating the focal length of the lens involvestaking video of a known-sized object at a known range.This can be easily achieved if standard calibrationsequences of the same calibration points are always takenfrom the same location, for example known markingson the deck at known range. The angle that these pointssubtend at the camera can be calculated from theirrange and dimensions, provided they are perpendicularto the angle of view; from this, focal length can bedetermined. An alternative way to achieve this is totake a photograph of a calibration field from the sameviewpoint, for example a picture of the deck from thecrows’ nest, using a camera with a known focal lengthlens. The angle measured between any two points thatcan be seen on a captured video frame of the calibrationfield can then be measured from the reference photo-graph and used to calibrate the video lens.
Cetaceans can be difficult subjects to photograph or filmat sea. Nevertheless, this method will only work if photo-graphs or video of the subjects can be obtained reliably infield conditions. To explore how easily the necessary imagescould be collected from a range of species of cetaceansat different distances and in a variety of situations, filmand video have been taken from a number of platforms,including small research vessels and whale-watching boats.An important application for this technique is in measur-ing ranges to cetaceans sighted during surveys. Wherepossible trials were conducted in conditions similar tothose of a sighting survey, for example from a vessel travel-ling at 6–8 knots with one or two observers on watch whohad no prior knowledge of the location of cetaceans.
JPE615.fm Page 880 Saturday, July 14, 2001 4:40 PM

881
Measuring range to cetaceans
© 2001 British Ecological Society,
Journal of Applied Ecology
,
38
,879–887
An equation for calculating the range to a floatingobject from the angle subtended by its waterline andthe horizon is given in Gordon (1990).
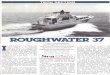
In Fig. 1,
δ
is the angle of dip from the horizontal tothe horizon:
δ
(mins of arc) = (Anderson 1966)eqn 1
γ
is the angle subtended between the target andthe horizon (HOT).
γ
can be obtained from a photo-graphic or video image and is the angle subtendedbetween the horizon and the waterline of the floatingtarget the range of which is to be measured.
β
is the angle subtended between the object and thevertical (COT):
β
= 90 –
γ
–
δ
Consider triangle CTO:
d
= range to the object.Using the cosine rule:
d =
(
R
+
h
) · cos
β
– eqn 2
If required,
p
, the ‘perpendicular’ range, can be simplyderived from
d
, the ‘hypotenuse’ distance:
p
=
If the earth is assumed to be flat then perpendi-cular distance,
p
, can be calculated using a simplerformula:
p
= tan(
β
)
×
h
eqn 3
In many situations (for example camera height > 10 m,range < 1000 m) this simplification results in errors inthe range of < 1%.
Angular measurements can be made readily fromphotographic or video images. If the focal length of thelens is known, then:
tan(
θ
) = eqn 4
where
θ
is the angle subtended between any two objectson a photographic image,
x
is the distance between thetwo points on the image and
f
is the focal length of thelens (see box in Fig. 1).
The angle subtended between the floating target andthe horizon is determined by measuring the perpendi-cular distance between that target’s waterline and thehorizon on an image (for example the box in Fig. 1) andallowing for any magnification of the image and thefocal length of the lens used to capture it. A variety ofmethods was used to make these measurements fromphotographic images. For example, the method usedto analyse photographs from trial A was the least
Fig. 1. Schematic showing the geometry of the horizon range-measuring method, after Gordon (1990). The box shows a typicalimage for analysis. Angle γ = arctan (x/f ) where f is the focal length of the camera used to obtain the image. Angle δ is the angleof dip from the horizontal to the horizon, and angle β is the angle between the target and the vertical at the observation position.Other parameters are specified in the key.
0.98height(feet)
(R + h ) 2 · cos 2 β – ( R + h ) 2 + R
2
d 2 – h2
xf---
JPE615.fm Page 881 Saturday, July 14, 2001 4:40 PM

882
J. Gordon
© 2001 British Ecological Society,
Journal of Applied Ecology
,
38
,879–887
sophisticated. It involved projecting the photographsonto a sheet of plain paper with a photographic enlarger,measuring the degree of enlargement (film sprocket-holes, which are 2 mm wide, are convenient for this),then marking the location of the relevant points (two ormore points on the horizon and one on the waterline ofthe target) with a pencil. The distance between the hor-izon and the waterline of the object was then measuredwith a ruler and setsquare, and range was calculatedusing a simple computer program. More convenientalternatives involve measuring these points using a digit-izing tablet, or scanning images and capturing videointo a computer, and then analysing these with a programsuch as
.
is a Visual Basic programthat can be obtained on request from the author. Tomeasure range with
a computer mouse is usedto mark with the cursor three relevant points on a digit-ized image: two points on the horizon and one on thewaterline of the target object. Lens focal length calibra-tion is achieved by marking known points on a calibra-tion image for video analysis, or by manually inputtingthe focal length and scan resolution for film.
In the trials reported here, photographic negativesand transparencies were scanned using a Nikon LS-100035 mm slide scanner (Nikon, Kingston upon Thames,UK). Video sequences were captured to the computerhard disk using a Fast DV Master video capture card(FAST Multimedia AG, München, Germany). A video-editing program, Adobe Premier (Adobe SystemsIncorporated, San Jose, CA), was then used to ‘stepthrough’ captured video sequences and find suitableframes for analysis, and these were saved as bitmapfiles. Suitable frames were free of camera shake ortransition effects and showed the object to be measuredclearly and unambiguously.
Errors may be introduced at many stages in the processof taking and analysing images. For example, errorsmay be made in plotting points on images, in measur-ing the focal length of the lens and in measuring truecamera height. Based on simulations and a sensitivityanalysis, Gordon (1990) concluded that error in cameraheight was likely to be the most important potentialsource of error. Some potential errors in camera heightcan be avoided by using good field technique to ensurethat the true height above the vessel’s waterline isrecorded accurately for each image (see later). Wavesand swell will tend to raise and lower both the observa-tion vessel and the object being measured, aboveand below the true sea level, and these errors cannotbe measured. The probable effect of waves and swell onmeasurements of range was investigated using a seriesof Monte Carlo simulations in which the ‘height’ ofboth the camera and the object were caused to varyindependently around their true values according toa sine function. Two thousand simulations were per-formed for each of 10 different wave heights (ranging
from 1% to 10% of camera height) independentlyaffecting the heights of the observation platform andthe object, at 10 different ranges (from 200 to 2000 m).
To test the accuracy of the range estimation method,images were collected of objects for which there was analternative, independent, measurement of range. Threesuch trials were conducted from different vessels in dif-ferent conditions and details of these are summarizedin Table 1. The independent ranges for trial A were thedifferences in the locations of a moored dinghy and theobservation vessel, provided by a non-differential globalpositioning system (ndGPS) navigator on the observa-tion vessel. Because of the limited accuracy of ndGPS(
c
.
±
50 m) this method was unlikely to have providedvery accurate test ranges but it was useful for makingmeasurements at substantial distances (out to 2000 m).For trials B and C, laser range-finding binoculars (LeicaGeovid 7
×
42 BD; Leica UK, Milton Keynes, UK),accurate to
±
1 m, were used to measure distance. TrialB involved estimating ranges from a moving boat tomoving targets and some errors may have been intro-duced by small time differences between range meas-urements obtained by the two methods. For trials Aand C, the target and the observation vessel were bothstationary. The independent measure of range shouldthus be most accurate and consistent for trial C.
Results
Errors in height
From examination of equation 3 and manipulation ofequation 1 it is clear that errors in camera height,expressed as a proportion of camera height, will causean equal proportional error in range. Thus, for ex-ample, with a camera height of 20 m, a 0·5-m error inheight will cause a 2·5% error in range.
Effects of waves and swell.
The overall effect of errorsin the height of the camera and target due to waves oncalculated ranges was investigated using Monte Carlosimulations. It was found that when errors due to waveswere introduced the proportional standard deviationof range estimates were approximately equal to 0·5 of thewave height expressed as a proportion of the cameraheight.
Thus, for a camera height of 20 m, waves with aheight of 0·5 m will result in a population of rangeswith a standard deviation of 1·25%. These errors intro-duced no significant bias, so taking the average rangemeasurements from several frames, which can readilybe done when video is used with objects that are in viewfor extended periods, will result in more precise rangeestimation. In considering the magnitude of effects of
JPE615.fm Page 882 Saturday, July 14, 2001 4:40 PM

883
Measuring range to cetaceans
© 2001 British Ecological Society,
Journal of Applied Ecology
,
38
,879–887
waves on range estimation it should also be remem-bered that large heavy objects, such as research boatsand whales, will not rise and fall by as much as the waveheight as a wave passes, and short steep waves will haveless effect than long slow swells. Light floating objects,such as sea birds or oil slicks, on the other hand, willmove by as much as wave height.
Effects of heeling.
As a boat rolls or heels, cameraheight will be reduced in relation to the cosine of theangle of heel. Unlike errors due to waves, those due toboat heel only affect camera height but will always actto reduce true height, causing ranges to be overestimated.For typical angles of heel in good weather conditions,these effects will be very small; an angle of heel of 10
°
will result in ranges being overestimated by 1·5%.
Other sources of error
Refraction.
As light travels through the earth’s atmo-sphere it is subject to refraction. Anomalous refractionconditions will affect the angle of dip to the horizon(
δ
in Fig. 1). This will result in a fixed angular error,so that more distant objects, which subtend a smallerangle with the horizon, will be most seriously affected.Under certain meteorological conditions, the effectsof refraction will be different from those assumed in thecalculation of
δ
, leading, in some cases, to phenomenasuch as mirages. Light from distant targets may also besubject to refraction. In such extreme conditions, rangeestimation techniques using the horizon, including thisone, will not be reliable. Examining the horizon withbinoculars for signs of heat haze or mirage will providesome indication that these conditions exist. In lesssevere cases, nautical almanacs can be consulted toprovide correction factors to use in particular meteor-ological conditions. In addition, a measure of refrac-tion can be obtained empirically by regularly collectingimages of objects, such as buoys and boats, at knownranges during fieldwork.
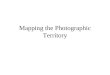
The results of the three trials comparing photographic/video range measurements and measurements of rangemade with ndGPS or laser range-finding binocularsare summarized in Fig. 2 and Table 1. Errors in rangemeasurement are likely to be proportional to range,thus, in most cases, errors are considered as a percentageof range:
percentage error = (photogrammetric range – independent range)
×
100/(independent range)
Although the potential accuracy of the range-finding binoculars was very good (
±
1 m), there wereindications that this was not always achieved in the field.For example, on some occasions the binoculars gave
Tab
le 1
.
Sum
mar
y of
thr
ee fi
eld
tria
ls t
o in
vest
igat
e th
e ac
cura
cy o
f m
etho
ds fo
r m
easu
ring
the
ran
ge o
f ob
ject
s at
sea
Tri
al
Inde
pend
ent
rang
e es
tim
atio
n m
etho
d (a
ccur
acy)
Pho
togr
amm
etri
c m
etho
dT
arge
tV
esse
l typ
e
Cam
era
heig
ht
(m)
Bea
ufor
t w
ind
forc
e (w
aves
and
sw
ell)
(m
)
Num
ber
of
imag
es a
naly
sed
at (n
umbe
r of
di
ffer
ent
rang
es)
Min
.–m
ax.
rang
e m
easu
red
(m)
Mea
n di
scre
panc
y (1
-tai
led
t
-tes
t of
prob
abili
ty >
< 0
) (m
)
Mea
n an
d (S
D)
of a
bsol
ute
% d
iscr
epan
cy
AN
on-d
iffer
enti
al
GP
S (
±
50 m
)35
-mm
cam
era
300-
mm
lens
Moo
red
ding
hy14
-m y
acht
‘S
ong
of t
he W
hale
’13
·42
(0·7
5)55
(8)
190
–195
0–5
·5 (
0·21
3)4·
60 (
5·40
)
BL
aser
ran
ge-fi
ndin
g bi
nocu
lars
(
±
1 m
)So
ny D
CR
-PC
7E
digi
tal c
amco
rder
Yac
hts
and
navi
gati
on b
uoys
17-m
yac
ht
‘Silu
rian
’14
·23–
4 (0
·5)
50 (
15)
167
–939
–3·7
(0·
119)
3·23
(3·
15)
CL
aser
ran
ge-fi
ndin
g bi
nocu
lars
(
±
1 m
)C
anon
MV
1 di
gita
l cam
cord
er
wit
h pr
ogre
ssiv
e sc
an
‘Por
pois
e–si
zed’
bu
oy32
-m t
raw
ler-
type
re
sear
ch v
esse
l ‘A
bel J
’8·
51–
2 (0
·5)
94 (
33)
80–1
156
+3·
8 (0
·002
)*2·
70 (
4·28
)
All
199
(56)
80–1
950
0·7
(0·6
54)
3·35
(4·
45)
*Mod
erat
e le
vel o
f st
atis
tica
l sig
nific
ance
.
JPE615.fm Page 883 Saturday, July 14, 2001 4:40 PM

884
J. Gordon
© 2001 British Ecological Society,
Journal of Applied Ecology
,
38
,879–887
range measurements to objects other than the appar-ent target. In addition, there was always some time delaybetween obtaining an object’s range with the photo-grammetric and laser binocular methods. Repeatphotogrammetric range measurements at a particularrange (usually at least three measurements were taken),plotted in Fig. 2, tended to cluster together, showinga consistent discrepancy from the independently meas-ured range value. This suggests an error in the singleindependent value rather than the photogrammetricmeasures of range. Clearly, as both photogrammetricand independent range measures included errors, thediscrepancy between the two will always overestimatethe real error attributable to the photogrammetric method.
Overall, there was very good agreement betweenranges measured using the photogrammetric techniqueand other methods (Fig. 2). Photogrammetric rangemeasures were accurate. Mean differences in ranges forpooled data from all trials showed only a small non-significant bias. Individual trials had small biases withdifferent signs, and bias was only significant in trial C,where there was a tendency to overestimate range (onesample
t
-test,
P
= 0·002). In this trial, observers in asmall boat close to the target buoy measured the rangeback to the observation vessel using laser range-findingbinoculars and consistent errors in range may haveresulted from uncertainty about which part of theship actually reflected the laser. At less than 4 m, themagnitude of this bias would not be significant formost applications. Overall, the mean absolute percent-age discrepancy between independent and photo-grammetric range measures was 3·4% with a standarddeviation of 4·5%, indicating a useful level of precision.As expected, trial C, for which the independent meas-ure of range was judged to have been most consistent,showed the lowest percentage range discrepancy (2·7%).
Some of the largest percentage errors occurred atthe shortest ranges. For trials B and C, the means andstandard deviation (SD) of discrepancies for rangesof less than 400 m were compared with those greaterthan 400 m. The means of absolute percentage dis-crepancies and SD for trials B and C, respectively,were: < 400 m = 4·56% (3·80%) and 4·97% (6·16%);> 400 m 2·10% (1·89%) and 1·27% (1·13%). Discrepan-cies were lower for greater ranges. This may be anindication of a source of error with an effect that is notproportional to range, such as an error due to poor co-ordination in the time at which the two range estimateswere obtained or resulting from anomalous refractionconditions. Values for trial C at ranges > 400 m mightbe taken as the fairest indication of the precision of thevideo method.
Field experiences measuring ranges to cetaceans,grouped by species with similar characteristics, aresummarized below.
Large whales: sperm
Physeter macrocephalus
L. 1758, fin
Balaenoptera physalus
L. 1758, right
Eubalaena
spp. and humpback
Megaptera novaeangliae
Borowski 1781
These species typically remain at the surface, blowingfor several minutes between longer dives. They are largeand, during these at-surface recovery periods, are slowmoving with predictable behaviour. Collecting imagesfrom species like this is very straightforward, usingeither a still camera or video. Useful images of spermwhales have been obtained at ranges of over 3000 m.Video cameras typically have view finders with poor
Fig. 2. Comparison of ranges calculated with the video/photographic method and determined using laser binoculars or fromGPS positions. Trial A compared photographic measurements with ranges calculated from non-differential GPS-derivedlocations. Trials B and C compared range measured using video to those measured with laser range-finding binoculars. The lineof equal ranges is shown.
JPE615.fm Page 884 Saturday, July 14, 2001 4:40 PM

885
Measuring range to cetaceans
© 2001 British Ecological Society,
Journal of Applied Ecology
,
38
,879–887
acuity on which a distant whale would be difficult todistinguish. Leaper, Reid & Papastavrou (1999) describeusing binoculars mounted in parallel with a video camerato collect images of whales for range-finding using themethod explained in this paper. This equipment shouldalso be suitable for use with many other species.
Minke whale
Balaenoptera acutorostrata
Lacépède 1804
The surfacing behaviour of minke whales is much lesspredictable than that of the large whales mentionedabove. Stern (1992) described a typical pattern ofaround four brief surfacings interspersed with longerdives for minke whales off central California, whileJoyce
et al
. (1989) reported a similar pattern for radio-tagged minke whales off Norway, with from three to sixsurfacings interspersed with longer periods of sub-mergence. Minke whales are visible for only a shorttime at each surfacing (about 3 seconds according toJoyce
et al
. 1989). Minke whales encountered andvideoed in Hebridean waters during trials of this tech-nique behaved in a similar manner (J. Gordon, personalobservation). Typically, the first surfacing of thesewhales would not be captured on film or video but atleast one subsequent surfacing in a bout of three orfour surfacings would be captured on about 70% ofoccasions. Because the animals are usually only brieflyvisible at the surface, video is more effective than filmwith this species. It was found that mounting a rifle’stelescopic sight on the video camera, so that it couldbe readily ‘aimed’ at a surfacing whale without usingthe camera’s viewfinder, increased the efficiency withwhich images could be obtained. Other fast-movingwhales with unpredictable surfacing patterns, such assei whales
B. borealis
Lesson 1828 and Bryde’s whales
B. edeni
Anderson 1878, are also likely to fall into thiscategory.
Dolphins and pilot whales
Globicephala
spp.
Individuals of these species are usually encounteredin groups. Filming groups is easier than filming indi-viduals and images of groups of dolphins and pilotwhales have generally been easy to capture using video.
Porpoises Phocoenidae
Porpoises, which are less demonstrative than dolphinsand found in smaller pods, are more difficult to film.However, during simulated surveys, approximately halfof the harbour porpoises
Phocoeana phocoena
L. 1758
sighted were captured on video at the second or thirdsurfacing.
Discussion
This new method provides reliable and accuratemeasures of range to animals or objects floating at the
water’s surface. In reasonable field conditions (seastate of 3 or less and a clearly visible horizon), anaccuracy of better than 3% can be achieved fromcamera heights of
c.
13 m on small vessels of < 15 mlength. As errors in camera height due to waves arethought to be a major source of error in calculatedrange, and because the effects of these height errorsare proportional to camera height, more accurateresults should be obtained when larger more stablevessels, and higher viewing platforms, are used. Incalm conditions, and for applications where absoluteaccuracy in range may be less important, smallervessels with lower viewing platforms should proveadequate.
Both photographic and video images have been ana-lysed to provide accurate range estimates. It is usuallyeasier to obtain images of moving objects using videothan photography. In addition, media costs are lowerand analysis using computers is more straightforward.This method should find a number of applications inmarine research and management.
Line transect surveys require a reliable measure ofrange for all sighted animals. Typically, however, theseare estimated by eye during cetacean surveys, eventhough the inaccuracies and inconsistencies of rangeestimation by eye are well documented. The methodsdescribed here allow ranges to be measured rather thanestimated, provided the vessel has an elevated observa-tion platform (> 6 m) and the horizon or a shoreline atknown range is visible. Species vary in the ease withwhich the necessary images can be obtained. For somespecies (for example phocoenids, beaked whales, minkewhales) further work can be usefully done to developefficient techniques for reliably capturing images onvideo or film.
It is probable that in some cases it will not be possibleto obtain range-measuring images for every sightingmade during a survey and, for these, only the observers’estimates of range will be available. Even so, theaccuracy of each observer’s range estimates can bemeasured for other sightings using video rangingmethods and, if appropriate, calibration factors can beapplied to allow for consistent biases.
Nowadays sighting surveys usually include one ormore range estimation experiment when the observers’distance estimation abilities are assessed and an ele-ment of training may take place. However, the targetsused during these experiments are often larger thancetacean cues and are constantly visible while thesighting vessel approaches or leaves them duringexperiments. This has led some to question whetherthese are really fair tests of an observer’s ability to estim-ate range to cetaceans in the field. Video range-findingcould be used to make such experiments more realisticand provide better calibration and quantification oferrors for observers.
JPE615.fm Page 885 Saturday, July 14, 2001 4:40 PM

886
J. Gordon
© 2001 British Ecological Society,
Journal of Applied Ecology
,
38
,879–887
If the range and bearing to target animals is measured,and the movement of the sightings platform is alsorecorded, then the location and fine-scale movementsof sighted animals can be determined. Bearings to ani-mals can be measured with hand-bearing compasses,sighting binoculars or a pelorous, while the researchvessel’s movements can be plotted accurately from aGPS logged by a computer. New cetacean survey tech-niques that combine features of both mark–recaptureand line transect methods, use dual independentplatforms and forward tracking, allow the proportionof animals missed on the track line to be estimated(Hammond
et al
. 1995; Borchers, Zuchini & Fewster1998). These methods rely on accurately locating andtracking sightings made by the independent platformso that duplicate sightings can be identified. In suchcases, errors in locating animals may lead to under-estimates of the number of duplicate sightings and resultin upwardly biased population estimates. Field trialsconducted during a National Marine Fisheries Servicesighting survey for harbour porpoise in 1999 haveshown that good range-measuring video can be readilyobtained during forward tracking exercises using acamcorder fixed on top of stand-mounted 25X ‘big-eye’binoculars.
Mitigation measures, such as those commonly in forceduring seismic surveys or activities involving under-water explosions, require certain actions, such asshutting down air-gun arrays, if sensitive animals areseen within a certain critical range. In these cases, itis important that ranges are measured accurately andspeedily, and it will often be desirable to track themovements of animals and groups before they comeinto this critical area. Video methods will help accuraterange measurements to be made in such situations, butrather than making recordings for later analysis thevideo signal would be fed directly to a computer sothat an operator could perform immediate analysis ofcaptured images.
, ,
Measuring horizontal angles (parallel to the horizon)as well as those perpendicular to the horizon (whichgive range) will yield the location of points on the
xy
plane of the sea’s surface. These can be used to mapthe extent and location of individuals within cetaceanschools and flocks of swimming birds (DeNardo
et al
. 2001). They could also be used to map small oilslicks or surface oceanographic features.
Range estimation by eye has been shown to be inac-curate, biased and highly variable between observers.Calibration and training exercises are often carriedout before sightings surveys; these typically involveestimating range to large, constantly visible, objectsas a vessel steams past them. The visual targets arequite unlike those presented by most animals at sea, andother sources of information on range (from vesselmovement for example) are available. Range estima-tion to such targets is probably easier than to cetaceansseen briefly in the field. Even so, Øien & Schweder(1992) reported results from a test using experiencedobservers that showed both substantial bias (rangingfrom +9% to –17% depending on distance) and vari-ability (SD of residuals from regression ranged from12% to 400% depending on range, based on data inØien & Schweder 1992; Table 1). Reticule binocularsare inexpensive and work on the same principle as thetechnique described here, but measuring the number ofreticule increments between the horizon and a brieflyglimpsed object is very difficult, especially on a rockingship. Thompson & Hiby (1985) investigated the use ofreticule binoculars during sightings surveys for whalesand suggested that they were mainly useful as a meansof reinforcing the observer’s ability to judge distancerather than an as a direct measurement tool. Laserrange-finding binoculars are specialized items of equip-ment but are becoming more affordable. Ranges canbe measured very accurately (±1 m) provided a largeclear target is ‘hit’ by the laser, but this can rarely beachieved during a cetacean survey. In the course oftrial B, for example, it was found that even sailing yachtsand navigation buoys did not consistently return reli-able ranges. The advantage of the method describedhere is that measurements are made at leisure from aphotograph or video frame and, with video, measure-ments can be made from several images, so that someerrors can be averaged out and the operator is confidentthat the range to the target in the image has beenmeasured reliably. Although the method is unlikely toachieve the precision of which laser range-finders aretheoretically capable, it does provide consistent levels ofaccuracy in the field that far exceed those achievablewith other techniques. The ability to measure rangeaccurately using the relatively simple and inexpensiveequipment that this method provides should find manyapplications in both population assessment, behaviouralstudies and disturbance mitigation.
Acknowledgements
I am indebted to the research teams and crew on theresearch vessels ‘Song of the Whale’, ‘Silurian’ and‘Abel J’ for their help and patience during field trials.This work was completed while the author was sup-ported by the International Fund for Animal Welfare.An earlier version of this paper was improved by
JPE615.fm Page 886 Saturday, July 14, 2001 4:40 PM

887Measuring range to cetaceans
© 2001 British Ecological Society, Journal of Applied Ecology, 38,879–887
helpful suggestions from three anonymous refereesand by the work of the editors, to whom I am mostgrateful.
References
Anderson, E.W. (1966) Principles of Navigation. Hollis andCarter, London, UK.
Borchers, D.L., Zuchini, W. & Fewster, R.M. (1998) Mark–recapture models for line transect surveys. Biometrics, 54,1207–1220.
Buckland, S.T., Anderson, D.R., Burnham, K.P. & Laake, J.L.(1993) Distance Sampling: Estimating Abundance of Bio-logical Populations. Chapman & Hall, London, UK.
DeNardo, C., Dougherty, M., Hastie, G., Leaper, R., Wilson,B. & Thompson, P.M. (2001) A new technique to measurespatial relationships within groups of free-ranging ceta-ceans. Journal of Applied Ecology, 38, 888–895.
Gordon, J.C.D. (1990) A simple photographic technique formeasuring the length of whales from boats at sea. Reports ofthe International Whaling Commission, 40, 581–588.
Hammond, P.J., Benke, H., Berggen, P., Borchers, D.L.,Buckland, S.T., Collet, A., Heide Jorgensen, M.P.,Heimlich Boran, S., Hiby, A.R., Leopold, M.S. & Øien, N.(1995) Distribution and Abundance of Harbour Porpoisesand other Small Cetaceans in the North Sea and AdjacentWaters. Report 92–2/UK/027. (SCANS). European Com-mission LIFE Project. Sea Mammal Research Unit,Cambridge, UK.
Heinemann, D. (1981) A range finder for pelagic bird census-ing. Journal of Wildlife Management, 45, 489–493.
Joyce, G.G., Øien, N., Calambokidis, J. & Cubbage, J.C. (1989)Surfacing rates of minke whales in Norwegian waters. Reportsof the International Whaling Commission, 39, 431–433.
Leaper, R., Reid, K. & Papastavrou, V. (1999) Calibration ofcetacean data from multidisciplinary surveys around SouthGeorgia using a second independent observation platform.SOWER 2000 Workshop, Edinburgh. International WhalingCommission, Cambridge, UK.
Lerczack, J.A. & Hobbs, R.C. (1998) Calculating sightingdistance from angular readings during shipboard, aerial,and shore-based marine mammal surveys. Marine MammalScience, 14, 590–599.
Øien, N. & Schweder, T. (1992) Estimates of bias and variabilityin visual distance measurements made by observers duringshipboard surveys of northeastern Atlantic minke whales.Reports of the International Whaling Commission, 42, 407–412.
Stern, J.S. (1992) Surfacing rates and surfacing patterns ofminke whales (Balaenoptera acutorostrata) off centralCalifornia, and the probability of a whale surfacing withinvisual range. Reports of the International Whaling Commis-sion, 42, 379–385.
Thompson, D. & Hiby, A.R. (1985) The use of scale bino-culars for distance estimation and a time lapse camera forangle estimation during the 1983/84 IDCR minke whaleassessment cruise. Reports of the International WhalingCommission, 35, 309–314.
Received 4 August 2000; revision received 2 January 2000
JPE615.fm Page 887 Saturday, July 14, 2001 4:40 PM