Embed Size (px)
Citation preview
ME 5286Robotics Labs
Hello Cobot WorldTAs: Reed Johnson, Mark Gilbertson
2018
Table of Contents
• Lab Overview• UR5 Robot• Lab 1 Description• Logistic Considerations
Lab Overview

Logistics
• Four labs will be performed– Hello Cobot World (2 wks)– Repeatability and Straightness (2 wks)– Gripper Control (1 wks)– Flashlight Assembly (3 wks)

Deadlines
February 09, 2017 – Lab 1 ReportFebruary 23, 2017 – Lab 2 ReportMarch 02, 2017 – Lab 3 ReportMarch 23, 2017 – Scheduled Lab 4 Sessions EndMarch 26-30, 2017 – Lab 4 Demo with ProfessorApril 04, 2017 – Lab 4 Flashlight Report
Safety
• Two people must be present in the lab when operating the UR5 robot.
• Failure to follow this rule will result in a zero on the lab.
• Use common sense and don’t stand in the robot’s path while its operating.
• While operating the robot, someone must be holding the Teaching Pendant with a hand ready to hit the E-stop.

Robot Resources
• http://me.umn.edu/courses/me5286/robotlab/resources.shtml

UR5 Robot

UR5
• 6 DOF• Collaborative Robot• 5 Kg payload• 850 mm reach
Lab 1 Description
Hello Cobot World
Task #1-3
• Move the robot through three poses– Cartesian space– Joint space
• Three programming methods will be explored– PolyScope– RoboDK– RoboDK Python API
Language Options• PolyScope
– Visual programming– Comes preloaded on the teaching pendant– Offline simulator available for multiple platforms
• RoboDK– 3rd party robot simulator– Allows you to bring CAD files into the simulation– License instructions can be found on Moodle
• RoboDK Python API– Allows you to program in Python and simulate in RoboDK– Post processor converts Python code to a language that
the UR5 can understand (URScript)

PolyScope
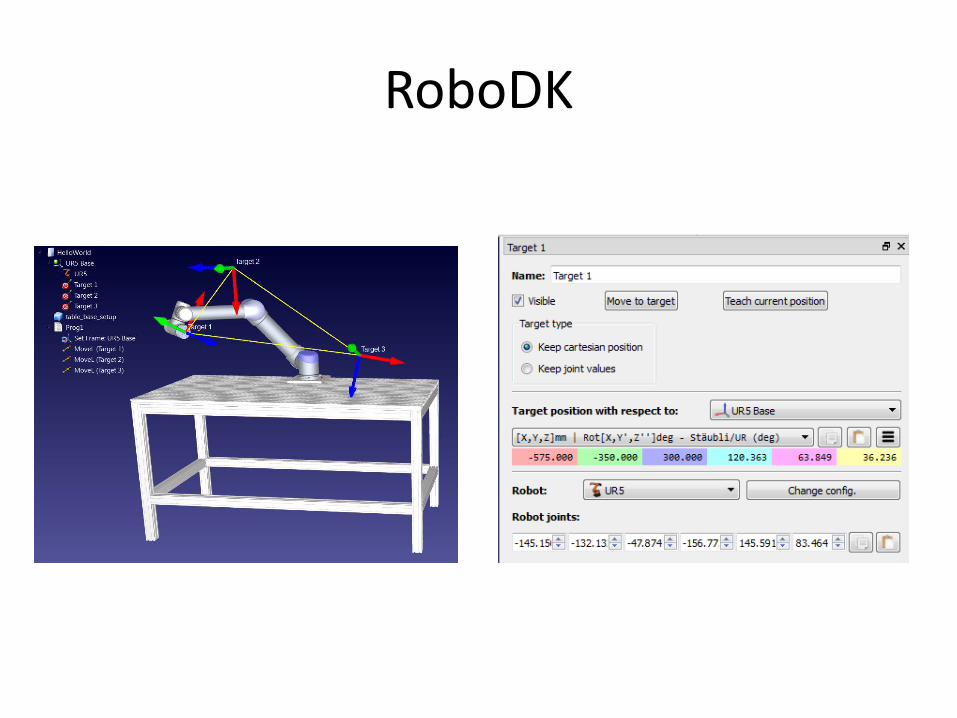
RoboDK

RoboDK Python API

Task #4
• Creating a program to trace a virtual cube– One cube which maximizes cube in y-direction– One cube which maximizes cube in z-direction
• You are free to program with your method of choice (Polyscope, RoboDK, RoboDK API)

Task #5• Create a program to collide with a fixture that
will record the force.– Will be recording maximum force at various
speeds and creating a plot.
• Must use RoboDK Python API– Task #3 will be helpful

Deliverable• Single PDF document
– Memo-format, printed, 12 pt font– Turn in a hard copy– Due February 9th, at the beginning of class– Answer all questions in the lab manual
• A single zip file containing all robot files– Zip file named [last_name]_[first
name]_helloworld.zip– All RoboDK, Python, Universal Robot Projects– Upload to Moodle

Sample Memo Format
Late Assignments• Assignments will not be accepted after their due
date. (Exceptions may be made for illness or other unavoidable circumstances).
• If an assignment is late for any reason other than a formally acceptable excuse (such as a doctor's note), a soft copy will be accepted via email up to 24 hours late.
• However, the grade will then be at most 50% of the total possible grade for that assignment.

Logistic Considerations

Website
• Most current source of documentation• Please notify TA(s) about
– Unclear sections– Missing sections
• Look at the course website if you haven’t already– me.umn.edu/courses/me5286/

Time Management• 5 to 15 hours per week• Plan Ahead! No Excuses!
– You will have to come prepared to the labs

Office Hours
• Office Hours: TBD• Office hours get crowded before due dates• Bring your computer if you are able• Bring notes, previous attempts, etc.

Questions
?





















