Embed Size (px)
Citation preview

ME 383S Bryant February 17, 2006 1
CONTACT • Mechanical interaction of bodies via surfaces • Surfaces must “touch” • Forces press bodies together • Size (area) of contact dependent on forces, materials,
geometry, temperature, etc. • Contact mechanics
ME 383S Bryant February 17, 2006 2
NATURE OF CONTACT Rough surfaces contact Highest peaks on highest peaks Contact area = discrete islands Real contact area small fraction of apparent area Consequence contact stresses higher heating (friction) more intense electrical contacts: local constriction resistance

ME 383S Bryant February 17, 2006 3
CONTINENTAL ANALOGY OF CONTACT
• Earth's surface rough: mountains & valleys
• Place South America
on North America • Contact: highest peaks
against highest peaks - Andes/Appalachia
- Highlands/Rockies
• Apparent contact area large, real contact area small • Contact between bodies similar

ME 383S Bryant February 17, 2006 4
CONTACT MECHANICS FUNDAMENTALS
• Fundamental Solutions:
• Boussinesq: 3D Elastic deformations from point force normal to semi-infinite space
• Flamant: 2D Elastic deformations from point force normal to semi-infinite space
• Contact between spheres elastic: Hertzian contact plastic: Indentation (Meyer) hardness overall quirks

ME 383S Bryant February 17, 2006 5
FLAMANT SOLUTION (2D)
• Point force P, normal to semi-infinite elastic space • 2D: plane strain or plain stress
P
x
y
(x, y)
v
u
• Elastic deformations: (u, v) along (x, y)
!
u = "P
4#µ($ "1)% "
2xy
r2
& ' (
) * + ,
!
v = "P
4#µ($ +1)log r "
2y 2
r2
% & '
( ) *
• Stresses:
!
" xx = #2P
$
y
r2#y3
r4
% & '
( ) *
’
!
" yy = #2P
$
y3
r4
% & '
( ) *
’
!
" xy = #2P
$
xy2
r4
% & '
( ) *
µ: elastic shear modulus, ν: Poisson's ratio Elastic modulus: E = 2(1 + ν)µ Dundars constant: κ = 3 – 4ν, plane strain, = (3 – ν)/(1 + ν), plane stress
!
r = x2
+ y2
, tan θ = x/y

ME 383S Bryant February 17, 2006 6
SOLUTION (2D) • Point force P, tangential to semi-infinite elastic space • 2D: plane strain or plain stress
P
x
y
(x, y)
v
u
• Elastic deformations: (u, v) along (x, y)
!
u = "P
4#µ($ +1)log r +
2y 2
r2
% & '
( ) * ,
!
v =P
4"µ(# $1)% +
2xy
r2
& ' (
) * + ,
• Stresses:
!
" xx =2P
#$x
r2
+xy
2
r4
% & '
( ) * ’
!
" yy = #2P
$
xy2
r4
% & '
( ) *
’
!
" xy =2P
#$y
r2
+y3
r4
% & '
( ) *
µ: elastic shear modulus, ν: Poisson's ratio κ: Dundars constant = 3 – 4ν, plane strain; = (3 – ν)/(1 + ν), plane stress
!
r = x2
+ y2
, tan θ = x/y

ME 383S Bryant February 17, 2006 7
BOUSSINESQ SOLUTION (3D) • Point force P on semi-infinite elastic space
P
x
z
y(x, y, z)
w
u
• Elastic deformations: (u, v, w) along (x, y, z)
u = P4πµ { x z
r3 - (1 - 2 ν) xr (r + z) }
v = P4πµ { y z
r3 - (1 - 2 ν) yr (r + z) }
w = P4πµ { z
2
r3 + 2(1 - ν)
r } µ: elastic shear modulus, ν: Poisson's ratio r = x2+ y2 + z2

ME 383S Bryant February 17, 2006 8
HERTZIAN CONTACT THEORY • Contact between elastic curved bodies • Initial Contact
• bodies (spheres) touch at
origin • curvatures R1, R2 • elastic parameters (E1,ν1) (E2,ν2) • initial separation
(parabolas)
Zo(x, y)= x2 + y2
2{ 1R1
+ 1
R2
}
E1 !1
E2 !2
xZo(x, y)
R2
R1
initial contact

ME 383S Bryant February 17, 2006 9
HERTZIAN CONTACT THEORY • Compressive normal load P • Induces contact pressures p = p(x, y)
2a
P
P
Zf(x, y)x
p(x,y)
• normal surface
deformations w1, w2 wi = wi[p(x, y); Ej, νj, Rj] (from Boussinesq) • final separation Zf(x, y) = Zo(x, y) - α + w1 + w2 • contact diameter 2a, defines contact area • normal approach α, amount centers of bodies come together

10
HERTZIAN CONTACT THEORY Problem Statement
2a
P
P
Z f(x, y)x
p(x,y)
Unknowns • a, α (eigenvalues) • Contact pressures p(x, y) (eigenfunction) Physics: static equilibrium Boundary Conditions • over contact (x2+ y2 < a2) Zf(x, y) = 0, p(x, y) ≥ 0 • outside (x2+ y2 ≥ a2) p = 0 • P = ⌡⌠
contact areap(x, y) dx dy

11
HERTZIAN CONTACT THEORY Solution
2a
P
P
Z f(x, y)x
p(x,y)
Sphere on Sphere (point contact):
• p(x, y) = po
!
1"x2
a2"y 2
a2
po = 3P2π a2
• a = {
!
3"P(k1
+ k2)R1R2
4(R1
+ R2)
}13
ki = 1- νi2
πEi
• α = {
!
9"2P2R1
+ R2
( ) k1
+ k2
( )16R
1R2
2}13

12
Cylinder on Cylinder (line contact):
•
!
p(x) = po 1"x2
a2 ,
!
po =2P
"al
•
!
a =4P(k
1+ k
2)R
1R2
l(R1+ R
2)
"
# $
%
& '
1/ 2
, ki = 1- νi2
πEi
•
!
" =P
l(k1 + k2) 1+ ln
4l3
(k1 + k2)P
1
R1
+1
R2
#
$ %
&
' (
) * +
, - .
/
0 1 1
2
3 4 4
• l: length of contact along axis of cylinders

13
• PLASTIC CONTACT THEORY • Indentation (Meyer) hardness
Bodies in contact Load P > elastic limit ⇒ plastic deformations
• Contact pressures p(x, y)
approximately uniform • Hardness pressure
(indentation hardness)
Η ≡ p ≈ PδA
H ≈ 3 x Yield stress • Use: estimate contact
area, given H and P
!A
P
P
p

14
OVERALL CONTACT MODEL
2a
P
P
p(x,y)
P
P
α2
α1
• Spheres • Increasing normal load P 0 ≤ P < Pe ; Elastic (Hertzian) contact model
α = α1+α2 = {9π2P2(k1+k2)2(R1+R2)16R1R2
}13
P ≥ Pe ; Elastic-Plastic contact model
α = α1+α2 > {9π2Pe2(k1+k2)2(R1+R2)16R1R2
}13
• Similar formulations, tangential loads & deformations P >> Pe, Meyer Hardness problem

15
Hardness (Indentation) Test
• Brinell hardness H B
– Hard steel ball (diameter D, load F)
– indent for 30 sec.
– measure permanent (pla stic) set
– HB = F/(! D t) [N/m2 ] (units of
stress)
– t " {D - (D 2 - d2 )1/2 }/2
• Other hardness tests– Vickers: Diamond point indentation
– Rockwell: measured like Brinell or Vickers
– scratch test
Hard St eel Ball
(d iamete r D)
s pecim en
F
dt

16
Brinell Hardness
• For steels S = S(H)
• Ultimate strength
Su = KB HB
• Yield Strength
Sy ! 1.05Su - 30ksi

17
Micro Hardness Measurements
Micro hardness tester: • Indents specimen • Use on thin films, e.g. hard drive coatings

18
CONTACT QUIRKS • Nonlinear contact stiffness P = P(α)
P = C α3/2 , C = 4
3π(k1+k2)R1R2
R1+R2
• ⇒ nonlinear contact vibrations • Tangential motions: slip/stick with friction high pitched "squeal" / fingernail on blackboard
19
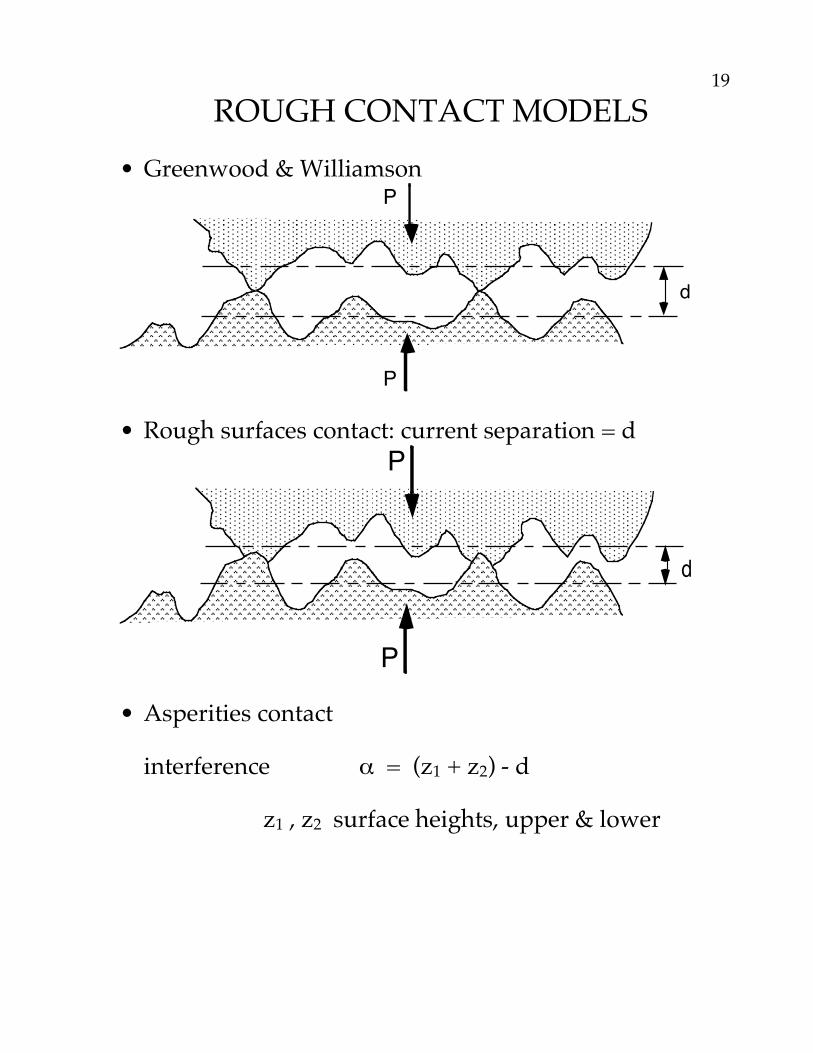
ROUGH CONTACT MODELS • Greenwood & Williamson
d
P
P
• Rough surfaces contact: current separation = d
d
P
P • Asperities contact interference α = (z1 + z2) - d z1 , z2 surface heights, upper & lower

20
• Model asperities as spheres
doz1
z2
r1
r2
h
• Relate contact quantities to surface heights z = z1 + z2 (random variable) • Expected values ⇒ Macroscopic Contact Parameters
E[H(z)] = N
!
H (z)d
"
# F(z)dz N: total number asperities H(z): physical quantity, dependent on heights z
Lower limit: heights z ≥ d for asperities to touch • Microscopic understanding ⇒ Important
practical engineering parameters

21
� Contact force (elastic) on ith asperity Asperity force: Pi(z) = C α3/2 = C (z - d)3/2 (Hertz)
Total force: H(z) = Pi(z)
P = E[Pi(z)] = N
!
Pi(z)
d
"
# F( z)dz
• Real contact area Asperity area: H(z) = Ai(z) = π a2
From Hertz: a = C1
!
"1/ 2
!
= C1
!
z " d( )1/ 2
!
• Contact conductance
Asperity conductance: Gi(z) = ρ/2a (Holm)





![INDEX [] · 2005-10-25 · 5 Bryant, John F, 27 Bryant, Levi Clinton, Sr, 109 Bryant, Lillie S, 101 Bryant, Linster, 101 Bryant, Litha L, 109 Bryant, Louisa M, 111 Bryant, Mary, 101](https://img.dokumen.tips/doc/110x75/5f4498e1f4a6be5e1a48d4d2/index-2005-10-25-5-bryant-john-f-27-bryant-levi-clinton-sr-109-bryant.jpg)























