Embed Size (px)
DESCRIPTION
Brazos y manipuladores
Citation preview

Manipuladores Robóticos
Los manipuladores robóticos son dispositivos que han ganado aceptación en el medio industrial gracias a su capacidad de llevar a cabo un número variado de tareas con rapidez y precisión, además de que pueden adaptarse a diversas situaciones con sólo modificar el programa que comanda los movimientos de la máquina. El incremento de su uso también obedece a que permiten reducir costos, mejorar la calidad del producto, aumentar la producción, reducir desperdicios, mejorar la seguridad del puesto de trabajo y ahorrar espacio.
El uso de estos equipos ha pasado de ser un lujo a ser una herramienta más con la que cuenta el aparato productivo, y el conocimiento de cómo funcionan y sus características, es la clave fundamental para obtener el mayor beneficio al momento de adquirirlas.
En la medida en que haya un conocimiento básico de los componentes de un manipulador, la forma como se relacionan y las posibilidades que existen para programarlos, se encontrará que hay gran cantidad de acciones factibles de desarrollar por estos aparatos.
En todo manipulador se pueden distinguir cuatro componentes: mecánico, hardware, control y software. Es la suma de ellos lo que hace que los manipuladores sean versátiles, inteligentes, robustos y de excelente repetibilidad.
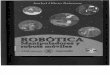
A pesar de parecer complicados, mecánicamente los manipuladores se arman y obtienen toda su flexibilidad a partir de un principio simple: conectar varias barras a través de articulaciones, que normalmente son rotacionales o traslacionales. El conectar varias barras entre sí recibe el nombre de cadena cinemática. Un robot industrial que se construye conectando barras una tras otra (en serie) se llama manipulador serial y está conformado por una cadena cinemática abierta. Esta última es la configuración más conocida –porque hay una oferta comercial mayor–, y tiene dos variedades: los brazos robóticos (Figura 1) y las mesas cartesianas (Figura 2).
Figura 1 Robot Serial de 6 GDL
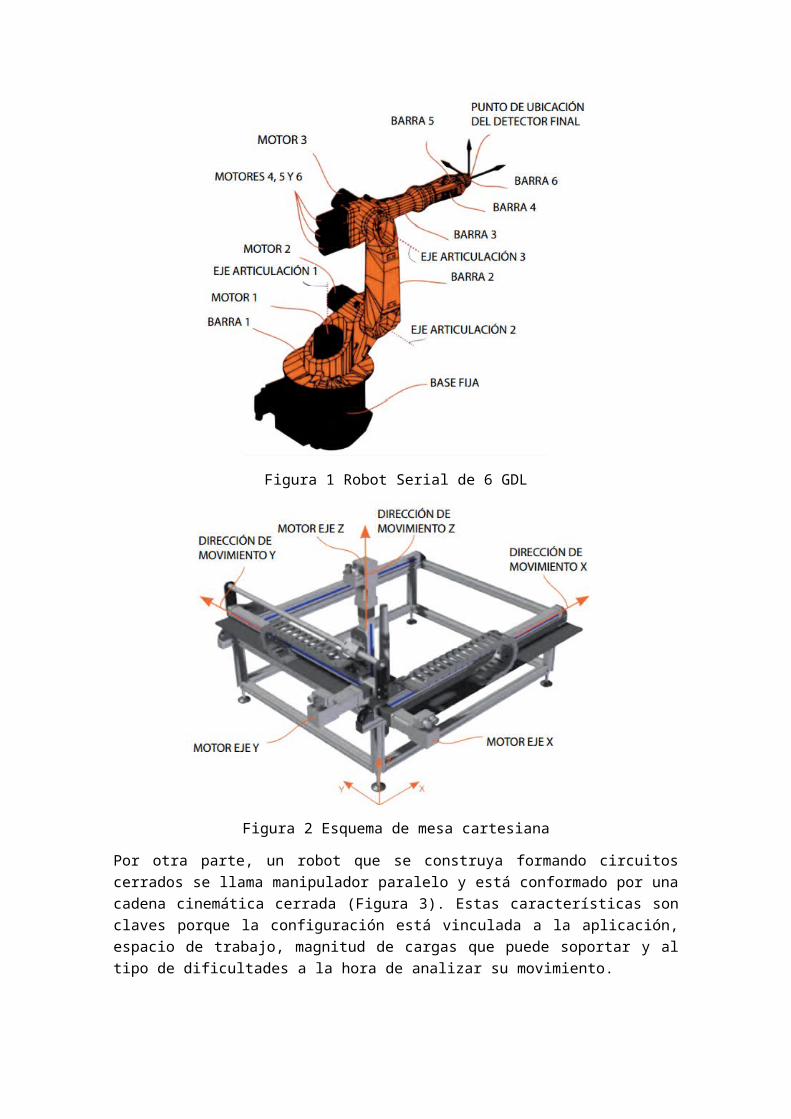
Figura 2 Esquema de mesa cartesiana
Por otra parte, un robot que se construya formando circuitos cerrados se llama manipulador paralelo y está conformado por una cadena cinemática cerrada (Figura 3). Estas características son claves porque la configuración está vinculada a la aplicación, espacio de trabajo, magnitud de cargas que puede soportar y al tipo de dificultades a la hora de analizar su movimiento.
Figura 3- Esquema de robot paralelo para aplicaciones pick and place
Los brazos robóticos son los más comunes debido a la diversidad de aplicaciones que tienen en la industria, tienen espacios de trabajo relativamente grandes y soportan cargas desde 3kg hasta 1300kg comparadas con su tamaño y peso, que puede ser de entre 20 y 4700kg.
Respecto a las mesas cartesianas, estas son una solución útil en máquinas de control numérico computarizado (CNC) como: fresas, ruteadoras, corte láser, corte plasma, entre otras. Esta configuración es muy acertada cuando el movimiento es predominantemente bidimensional (horizontal o vertical).

Los manipuladores paralelos son menos conocidos pero no menos útiles. El tipo más común son los robots delta, ampliamente utilizados en aplicaciones de posicionamiento rápido de objetos (pick and place), muy útiles en la industria alimenticia. Se caracterizan principalmente por sus altas velocidades y áreas de trabajo más reducidas que las de los robots seriales. La capacidad de carga típica de estos manipuladores es de 3kg, pero pueden encontrarse modelos que cargan los 8kg. El peso típico de todo el aparato está alrededor de los 130kg.
Como ejemplo puede observarse la (tabla 1), en la cual son comparados dos modelos particulares de un mismo fabricante. Ambos robots tienen la misma capacidad de carga, pero tienen pesos, zonas de trabajo y grados de libertad diferentes.
Manipulador Serial Manipulador ParaleloCapacidad de carga (kg) 8 8
Numero de ejes 6 4Peso 273 120
Voltaje 200-600 200-600Espacio de trabajo Volumen casi esférico de
3.6m de diámetroUn cilindro de 1.13m de
diámetro por 0.35mTabla 1-Comparativo entre modelos de un mismo fabricante
El objetivo de todo manipulador consiste en generar trayectorias y posicionar de forma adecuada una herramienta, que técnicamente recibe el nombre de efector final. Esta herramienta puede ser un gripper (garra), un electrodo de soldadura, una boquilla de corte, una pistola de pintura, entre otros. La variedad de elementos a manipular justifica el amplio rango de capacidades de carga; un robot puede llevar una pistola de pintura y otro tendrá que levantar el chasis completo de un automóvil.
El éxito de un manipulador está en que el efector final realice los movimientos que se le ordenan. Cuando estos movimientos son relativamente simples no hay problema, pero la mayoría de las aplicaciones que justifican la adquisición de un robot requieren de trayectorias complejas, y una vez se falla en lograr las trayectorias deseadas, se pierde la inversión. La frontera entre perder y ganar está en el conocimiento.
Un robot tiene varios actuadores, que pueden ser motores (eléctricos, por lo general) o actuadores lineales (conjuntos camisa-émbolo). Cada uno de los actuadores aporta un grado de libertad, es decir, un robot de seis grados de libertad es un robot con seis actuadores o con seis ejes.
La importancia de esto radica en que entre más actuadores se tengan más flexible y compleja es la máquina. Por ejemplo, un robot de tres grados de libertad (o tres ejes) podría generar trayectorias en un espacio de trabajo 3D; pero uno de seis, además de esto, podría poner la herramienta en el ángulo que se desee y, si se añade un séptimo eje, sería posible hacer que la pieza de trabajo rote independientemente.
Por ello, a la hora de escoger un robot, la cantidad de ejes depende de qué tan complejo es el movimiento requerido por la producción de la empresa, y es fundamental que cada uno de los actuadores se mueva con exactitud para que el efector final se desplace correctamente.

También debe verificarse que el sistema tenga la capacidad de aprender el tipo de tareas que el usuario espera ejecutar; la cantidad de puertos de entrada y salida de señales extra disponibles, en el caso de implementaciones futuras, como por ejemplo un séptimo eje; y el tipo de alimentación (voltaje y corriente) necesaria en el sitio de instalación, ya que el robot normalmente no incluye el regulador de voltaje.
Si el movimiento solo busca posicionar la herramienta sin importar los ángulos, tres grados de libertad son suficientes. En caso que sea requerido que la herramienta tenga ángulos específicos, seis grados de libertad en total es el estándar. Pero si el desplazamiento es más complicado, es necesario agregar más. La tabla 2 presenta algunas aplicaciones de robots según sus grados de libertad.
Grados de Libertad Aplicaciones Típicas3 Centros CNC, Manipulación de elementos4 Paletizado, manipulación, empacado5 Paletizado, manipulación, ensamble, soldadura6 Manipulación, ensamblaje, pintura, cortes y soldadura
complejosTabla 2-Aplicaciones manipuladores robóticos
Para conocer cómo se relaciona el movimiento de los actuadores con el movimiento del efector final, existen dos conceptos fundamentales: el primero es el ‘análisis directo’, que permite conocer el movimiento de la herramienta a partir del movimiento dado en cada uno de los ejes; y el segundo es el ‘análisis inverso’, el cual determina cuál es el movimiento requerido en cada eje para que el efector final realice el movimiento deseado. La solución correcta de este último es la clave para que cada actuador aporte en la medida justa al movimiento exitoso de la herramienta.
Equipamiento de soldadura para robots:
Además de la fuente de potencia para la soldadura al arco, se utiliza un equipamiento específico para el robot.
Este equipamiento está formado por distintos elementos que son necesarios para realizar la soldadura con el robot, compuesto por una antorcha de soldadura, un sistema de anticolisión, un paquete energético, una devanadora de hilo, una sirga para guiar el hilo, y un “bobin-holder” para sostener la bobina de hilo o algún otro sistema similar.
Además de este equipamiento básico, también se emplean algunos equipos opcionales y de uso común, para realizar la limpieza de la boquilla de la antorcha.
Un sistema de “auto-calibración” de la antorcha es también un sistema utilizado.
Figura 4-Equipamiento de soldadura.
Antorcha de soldadura:
La antorcha de soldadura es el elemento terminal del equipamiento de soldadura para robot. Dependiendo de que materiales y que espesores se desean soldar, así como la potencia necesaria para soldar y el tipo de robot que se desea emplear en la célula de soldadura, se debe escoger correctamente el tipo de antorcha que es necesaria para la aplicación, ya que existen distintos tipos de antorcha.
Estos tipos de antorcha van desde antorchas para robot antropomórfico de seis ejes estándar, hasta las nuevas generaciones de robots con brazo superior hueco, para el cual, la mayoría de fabricantes de antorchas de soldadura, ya fabrican antorchas adecuadas a este nuevo sistema. También es importante el sistema de refrigeración de las antorchas, que puede ser por aire o bien por agua.
La parte final de la antorcha, se denomina como “cuello de antorcha”, este cuello esta formado por distintas piezas, como la boquilla, por donde sale el hilo, difusor de gas para la
soldadura, y la tobera de protección. Los cuellos pueden ser de 180º, de 45º y de 22º usualmente.
El cuello de antorcha es fundamental en el proceso de soldadura ya que se encuentra en contacto directo con el baño de fusión durante todo el proceso. Por esta razón debe dimensionarse correctamente dependiendo de los materiales a soldar y sus características, acero, inoxidable, aluminio, tipo de gas, espesores a soldar, rendimientos etc.
En antorchas refrigeradas por agua, ésta llega hasta el portatubo de contacto para refrigerar lo más cerca posible de la punta de contacto.
En las antorchas refrigeradas por aire, es el gas de soldadura el que además de proteger refrigera el cuello. El gas de protección fluye alrededor de la punta de contacto con el fin de proteger el baño de fusión, que es el material fundido que al enfriarse crea la soldadura.
Por la antorcha se transporta el hilo guiado por la sirga hasta la punta de contacto. El tubo de contacto normalmente fabricado en CuCrZr, es la parte más próxima al baño de fusión, se fabrica en este componente por su mayor durabilidad y resistencia a altas temperaturas
Antorcha estándar refrigerada por aire:
Las antorchas de soldadura estándar refrigeradas por aire, para su instalación, necesitan un acoplamiento mecánico que va acoplado al anticolisión, y hace que el paquete energético vaya por el exterior del cuerpo del robot.
Este tipo de antorcha de soldadura, es capaz de realizar soldaduras de hasta 500 A de intensidad con CO2 y hasta 400 A con mezcla de gases de soldadura.
Existen numerosos modelos de antorcha refrigeradas por aire, siendo las que pueden trabajar entre 250 A y 350 A de corriente las más comunes.
Figura 5- Antorcha refrigerada por aire
Antorcha estándar refrigerada por agua:
Las antorchas de soldadura estándar refrigeradas por agua, permiten trabajar a mayor intensidad, hasta 650 A con CO2 y 550 A con mezcla de gases de soldadura. Además, los cuellos de la antorcha resultan más sencillos de sustituir por otro, de manera que el proceso de reparación se reduce.
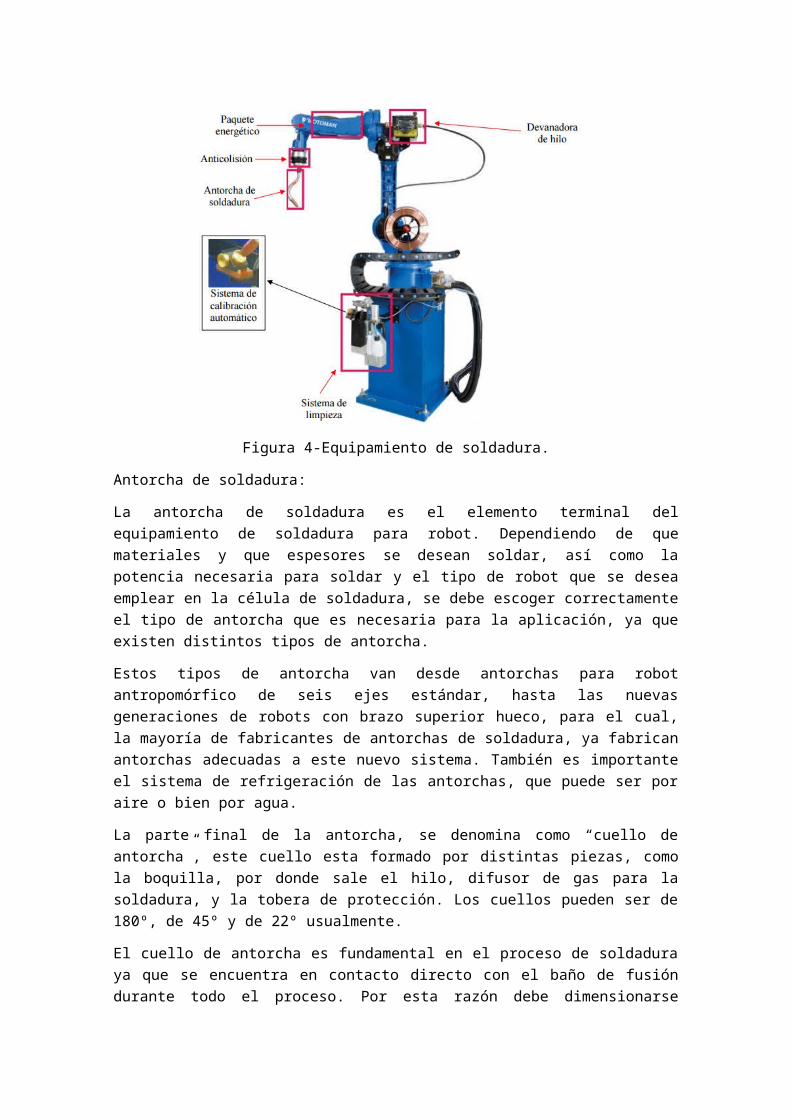
Figura 6- Sistema de refrigeración por agua
La circulación de agua por tuberías situadas en la carcasa de la antorcha de soldadura, mediante un circuito cerrado de agua, permite una refrigeración mucho más efectiva que la que se consigue mediante aire.
Antorcha para robot de brazo superior hueco:
Para los robots de brazo hueco superior, existen también antorchas de soldadura refrigeradas por aire o bien por agua, con características similares a las antorchas estándar.
La principal característica de este tipo de antorcha, es que no se le tiene que mecanizar un acoplamiento desde el anti-colisión hasta el cuello de la antorcha, puesto que ambos van unidos de modo que el grupo formado por el anti-colisión y la antorcha, es una prolongación del eje seis del robot.
Figura 7- Antorcha de soldadura y anticolisión para brazo hueco
Sistema anticolisión:
El sistema anticolisión es un elemento de seguridad para proteger la antorcha de golpes y posibles colisiones en utillajes y demás elementos que puedan colisionar con la antorcha. Se trata de un sistema en el que si la antorcha se desplaza en cualquier dirección a causa de una colisión, se activa un contacto normalmente cerrado situado en el anticolisión, que actúa como si fuera una rótula ante las colisiones, y detiene el movimiento del robot, como si se tratase de un pulsador de emergencia, cortando la alimentación al motor y provocando una parada. La ventaja de este sistema, es que se protege la antorcha de soldadura y el cuello de la antorcha multiplica su vida útil.
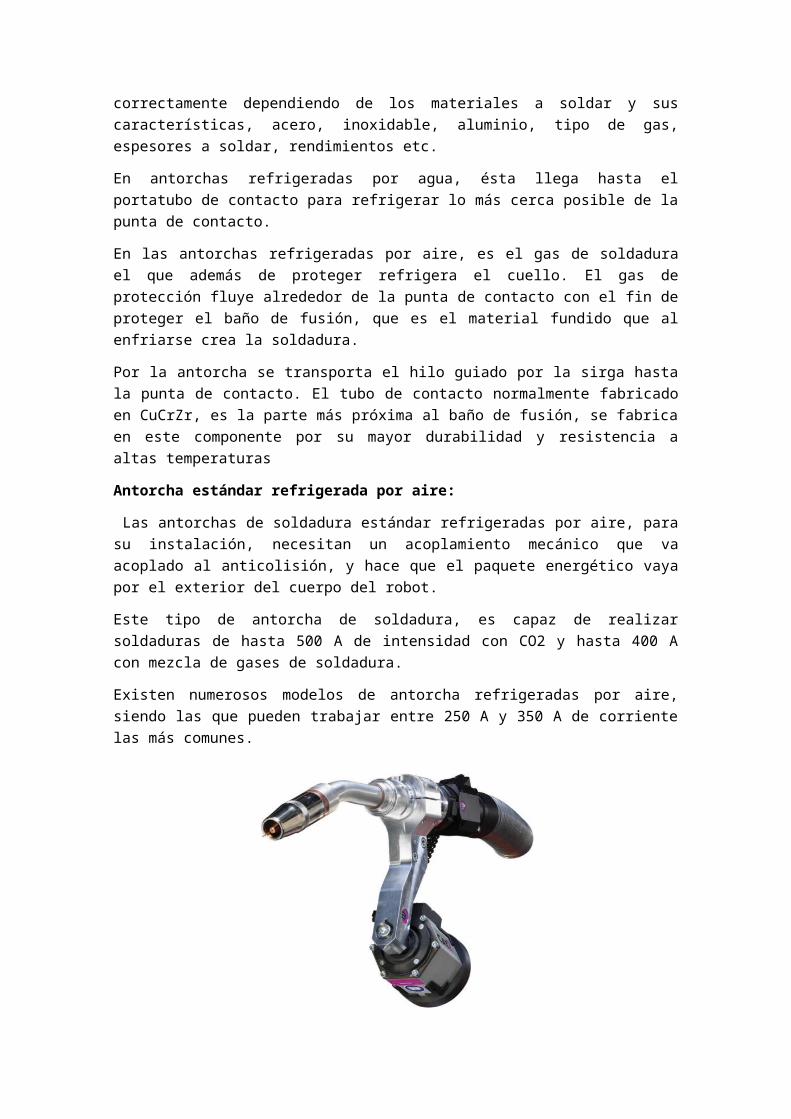
Figura 8-Sistema anticolisión CAT2
Sistema de extracción de humos:
Al realizarse el trabajo de soldadura, se generan humos debidos a la propia soldadura. Además se utilizan gases de protección para la soldadura, y muy a menudo se emplea para este propósito el CO2. Por estas razones es necesaria la instalación de extractores de humos para que la atmósfera que rodea a la célula robotizada, no sea nociva para la salud humana.
Existen diversos tipos de extractores de humos, que van desde sistemas móviles, hasta las campanas de extracción que son empleados tanto en células robotizadas de soldadura por arco, como en métodos de soldadura manual, así como para otras aplicaciones en las que pueda generarse humo y/o gases.
En este tipo de extractores de aire, tanto campanas como los brazos de aspiración, el aire pasa a través del la primera etapa de filtración capturando partículas grandes, mientras el filtro principal (99% HEPA) captura y elimina hasta las más pequeñas partículas de humo.
Figura 9- Sistema de aspiración