Embed Size (px)
Citation preview

Lumped Parameter and Feedback Control Lumped Parameter and Feedback Control Models of the Auto-Regulatory Response in Models of the Auto-Regulatory Response in
the Circle of Willisthe Circle of Willis
World Congress on Medical Physics and Biomedical Engineering 2003
K T Moorhead, C V Doran, J G Chase, and T David
Department of Mechanical EngineeringUniversity of Canterbury
Christchurch, New Zealand

Anterior
Posterior
Frontal lobe
Optic Chiasma
MCA
ICA
Pituitary Gland
Temporal lobe
Pons
Occipital lobe
ACA
ACoA
PCoA
PCA
BA
VA
Cerebellum
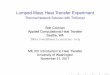
Structure of the CoWStructure of the CoW
• Geometry
• Purpose of CoW
• Auto-regulation
• > 50% do not have a complete CoW!
CFD model of the CoW
BA
LPCA1
LPCA2
LPCoA
LMCA
LACA1
LACA2
RACA2
ACoA
RACA1
RMCA
RPCoA RPCA2
RPCA1
LICA
+ve
+ve
RICA
BA
LPCA1
LPCA2
LPCoA
LMCA
LACA1
LACA2
RACA2
ACoA
RACA1
RMCA
RPCoA RPCA2
RPCA1
LICA
+ve
+ve
RICA

Research GoalsResearch Goals
• Desire: Better understand haemodynamics in the Circle of Willis (CoW) cerebral arterial system
– Realistic dynamics for auto-regulation– Match existing clinical data
• Goal: Create a simplified model of CoW haemodynamics to assist in rapid diagnosis of stroke risk patients prior to surgery or other procedures
– Computationally simple– Flexible
• Previous Work– No auto-regulation (Hillen et al. 1988; Cassot et al. 2000)– Steady state solution (Ursino and Lodi 1999; Hudetz et al. 1982)
In contrast, our model focuses on the transient dynamics

Modeling the CoWModeling the CoW
R
P1P2
q
Constant resistance between
nodes captured by simplecircuit analogy:
Leads to system of linear equations for flowrates q(t) due to input conditions P(t):
Ax(t) = b(t)
RBA
RLPCA1
RLPCA2 RLPCoA
RLMCA
RLACA1
RLACA2
RRACA2
RACoA
RRACA1
RRMCA
RRPCoA RRPCA2
RRPCA1 RRICA
RLICA
+ve
Simplified geometry schematic of arterial system for basic dynamic analysis
4
8
r
lR
Poiseuille Flow
R
PPq 21

q Dynamic
Resistance R(t) Auto - Regulation
Controller
u e qref + -
Auto-Regulation ModelAuto-Regulation Model
vessel wall
q qref
smooth musclecells
Ca2+
1. Pressure/flow difference sensed 2. Ca2+ released into cytoplasm3. Muscle contraction4. Contracting/Dilating vessel radius5. Changing resistance of vessels
System is nonlinear:
A(x(t))*x(t) = b(t)
Error in flowrate
Change in control input
Change in resistance
Calculate new flowrate
q = qref?
NO
YES
refref RRR )95.01()95.01(
dt
deKedtKeKtu dip )(
)()( tuRRR ref Resistance dynamics of contraction/dilation
Standard PID feedback control law
Amount of change is limited

Simulations and Model ParametersSimulations and Model Parameters
• Reference and constant resistances based on known physiological data
• Physiological data from thigh cuff experiments is used to determine control gains
– Efferent resistances follow the ratio (6:3:4) for the ACA:MCA:PCA in the steady state (Hillen et al., 1986)
– 20 sec response time for a 20% pressure drop (Newell et al., 1994 )
• Drop in RICA of 20mmHg is tested to simulate a stenosis
• Simulations run for a single vessel omission, testing each element of the CoW– Verifies model against prior research using higher dimensional CFD methods
• Simulation of a high risk stroke case with ICA blockage increasing resistance– Illustrates potential of this model

Results – Omitted Artery CasesResults – Omitted Artery Cases
% drop in flow through RMCA after 20% pressure drop in RICA
(Ferrandez, 2002)
(Present Model)
Balanced Configuration
18 19
Missing LPCA1 Not simulated 19
Missing LPCoA 18 19
Missing LACA1 18 20
Missing ACoA 18 20
Missing RACA1 20 21
Missing RPCoA 20 19
Missing RPCA1 Not simulated 19
•No failure to return to qref flow•Return times ~15-25 seconds
•Shows robustness of CoW system in maintaining flow and pressure

Balanced configuration before and Balanced configuration before and after modelled stenosisafter modelled stenosis
•Flowrates normalised to LICA
•Red shows change in direction from steady state
-3
-2
-1
0
1
2
3
4
5
6
7
8
BA LPCA1 LPCoA LICA LACA1 ACoA RACA1 RICA RPCoA RPCA1 LPCA2 LMCA LACA2 RACA2 RMCA RPCA2
No
n-d
ime
ns
ion
al
Flo
wra
te
A
BA
LPCA 1
LPCA 2
LPCoA
LMCA
LACA 1
LACA 2
RACA 2
RACA 1
RMCA
RPCoA RPCA 2
RPCA 1
LICA
RICA
ACoA
Efferent Arteries-3
-2
-1
0
1
2
3
4
5
6
7
8
BA LPCA1 LPCoA LICA LACA1 ACoA RACA1 RICA RPCoA RPCA1 LPCA2 LMCA LACA2 RACA2 RMCA RPCA2
Before Stenosis After Stenosis/Occlusion in RICA

-3
-2
-1
0
1
2
3
4
5
6
7
8
BA LPCA1 LPCoA LICA LACA1 ACoA RACA1 RICA RPCoA RPCA1 LPCA2 LMCA LACA2 RACA2 RMCA RPCA2
No
n-d
ime
ns
ion
al
Flo
wra
te
BA
LPCA 1
LPCA 2
LPCoA
LMCA
LACA 1
LACA 2
RACA 2
RACA 1
RMCA
RPCoA RPCA 2
RPCA 1
LICA
RICA
ACoA
Missing ACoA case before and Missing ACoA case before and after modelled stenosisafter modelled stenosis
•Before stenosis, same flowrates as balanced case
•Red shows change in direction from steady state
•Efferent flowrates maintained
Note loss of communicating artery flow to support right side
-3
-2
-1
0
1
2
3
4
5
6
7
8
BA LPCA1 LPCoA LICA LACA1 ACoA RACA1 RICA RPCoA RPCA1 LPCA2 LMCA LACA2 RACA2 RMCA RPCA2
Before Stenosis After Stenosis/Occlusion in RICA
Efferent Arteries

Results – High Stroke Risk CaseResults – High Stroke Risk Case
• High stroke risk case:– LICA and RICA radii reduced 50% and 40% respectively, representing
potential carotid artery blockages
– LPCA1 (Left Proximal Posterior Cerebral Artery) is omitted
– 20mmHg pressure drop in RICA simulating a stenosis is simulated
• This individual would be hypertensive to maintain steady state flow requirements – captured by model.– 93mmHg does not maintain reference flow rates in several efferent
arteries, even at maximum dilation
– ~113mmHg required to attain desired level.
Case is not common in all individuals but is encountered in those needing an endarterectomy

Results – High Stroke Risk CaseResults – High Stroke Risk Case
LEFT RIGHT
LPCA fails to achieve desired flow rate, indicating a potential stroke risk under any procedure which entails
such a pressure drop

ConclusionsConclusions
• A new, simple model of cerebral haemodynamics created
• Model includes non-linear dynamics of auto-regulation
• Iterative solution method developed enabling rapid diagnosis
• Model verified against limited clinical data and prior research
• Several simulations illustrate the robustness of the CoW
• High stroke risk case illustrates the potential for simulating patient specific geometry and situation to determine risk
Future work includes more physiologically accurate auto-regulation and geometry modelling, more clinical verification using existing data, and
modelling of greater variety of potential structures

Punishment of the InnocentPunishment of the Innocent
Questions ???