Embed Size (px)
Citation preview

PhD Thesis
Low-Latency Detection of Gravitational Wavesfor Electromagnetic Follow-up
Author:Shaun Hooper
Supervisors:Prof. David Blair
A/Prof. Linqing WenProf. Yanbei Chen
Dr Chad Hanna
This thesis is presented in partial fulfilment of the
requirements for the degree of Doctor of Philosophy of The
University of Western Australia.
School of Physics
2013


Preface
This section describes the author’s contribution to the work presented here,
and a summary of the layout in its presentation.
This thesis was undertaken between January 2009 and January 2013 at
the University of Western Australia, which includes three months between
March 2010 and June 2010 at the California Institute of Technology.
This thesis describes the design, implementation and testing of a new
search algorithm designed to detect the presence of gravitational waves from
low-mass binary coalescence in advanced detector data in real-time and with
near zero latency.
The author is not solely responsible for all work that contributed to this
thesis. Indeed, most gravitational wave scientists, including the author, are
members of a large >800 author collaboration known as the LIGO scientific
collaboration (LSC).
For the introductory chapters of this thesis, particularly the background
mathematical foundations of inspiral analysis in Chapter 2, the author has
taken inspiration from similar theses such as [1] and [2] to introduce the
reader to the details required to understand the development of the new low-
latency inspiral analysis pipeline presented in this thesis. Some descriptions
of linearised gravity in Chapter 2 overlap information found in standard texts
such as [3], where greater detail can be found.
Chapter 3 describes the design of the new search algorithm. The original
idea of using a summed IIR filter method for low-latency detection was in-
troduced to the author through the work of Yanbei Chen, Linqing Wen and
Jing Luan. Chapter 3 was published as a follow-up to a paper by Luan, et.
al. 2012 [4] that describes the use of a summed IIR method to search for
i

Newtonian waveforms. The author’s contribution to this chapter is, however,
original in its description and implementation of the design for higher order
waveforms. The author wrote this article, wrote the underlying experimental
programs, and analysed the results, with input from co-authors.
Chapter 5 is the result of an experiment that the author and Chad Hanna
performed on the LIGO computer cluster. The experimental results were
obtained from a computer application written by the author, but uses many
sub-routines from the LIGO algorithm library (LAL), which is a software
project contributed by many scientists. The author contributed significant
key sub-routines necessary to run the experiment in Chapter 5, such as the
IIR template bank construction, and the pipeline application itself (although
the design borrows heavily from similar pipelines written by Kipp Cannon,
Chad Hanna and Drew Keppel). The design and implementation of the
experiment and presentation of the results are the author’s work, with advice
and suggestions from the supervisors.
Chapter 6 contains the results of the pipeline that was part of a ma-
jor LIGO engineering run. The pipeline was similar to the one the author
wrote in Chapter 5, however again, much of the infrastructure to execute the
pipeline, such as the source of data, was supplied by the LSC. The design
and implementation of the experiment and presentation of the results are the
author’s work, with advice and suggestions from the supervisors.
ii

Abstract
Existing ground-based gravitational wave detectors are currently being up-
graded to their advanced configuration. When operational, the significant
increase in sensitivity will likely guarantee detection of gravitational waves.
With the imminent detection comes the question of what kind of electromag-
netic counterparts gravitational wave sources will have. One example has the
coalescence of neutron star binaries as a progenitor of short hard gamma-ray
bursts. Observing the rapidly fading electromagnetic counterpart of such
sources immediately after coalescence will provide information to verify as-
trophysical models and give greater insight to these highly energetic events.
Observation of the prompt optical and radio emission of gamma ray bursts
in real-time will require fast moving ground-based telescopes to respond to
triggers generated from gravitational wave detector searches.
This thesis describes the design, implementation and testing of a new
search algorithm designed to detect the presence of gravitational waves from
low-mass binary coalescence in advanced detector data in real-time and with
near zero latency. An introduction to the field of gravitational waves is given
in the first chapter, and specific gravitational wave data analysis techniques
are described in explicit detail in the second. The new algorithm, based on
the use of a bank of computationally efficient infinite impulse response filters
to search for an approximation of the inspiral phase of the gravitational wave-
form, is presented in the third and fourth chapters. With a good choice of
filter coefficients, the inspiral signals are shown to be approximated to greater
than 99%. The method was implemented in LIGO’s data analysis software
library, and made available to the greater community. The fifth chapter de-
scribes a search pipeline based on the new algorithm that was applied to real
iii

detector data from LIGO’s fifth science run, both with and without simu-
lated low-mass binary inspiral signals injected into the data. No significant
loss in detection efficiency or parameter estimation using the new algorithm
was found when compared to the theoretical limit. The sixth chapter demon-
strates the ability of the algorithm to recover signals in real-time and with
low-latency by searching for signals in LIGO’s second engineering run. The
pipeline was able to search for approximately 5000 templates in real-time and
report on multiple-detector coincident triggers for further follow-up with a
typical latency of ∼30 seconds. A final chapter describes how the aim of the
thesis was achieved, and outlines future work that can be developed from
this research.
iv

Acknowledgements
This thesis would not be possible without the help and guidance from all of
my supervisors; Prof Linqing Wen, Prof David Blair, Prof Yanbei Chen and
Chad Hanna. Throughout my candidature, there have been a number of fel-
low scientists that have contributed to the thesis. In particular, I owe a debt
of gratitude to Chad Hanna for his continuous encouragement. Similarly, I
would like to thank Kipp Cannon and Drew Keppel for their extensive help
on all matters related to gravitational wave research. In 2010 I was fortunate
enough to temporarily join the LIGO data analysis group at Caltech under
the guidance of Prof Alan Weinstein. Help from graduate students Stephen
Privitera, Leo Singer, Kari Hodge and Melissa Frei there was indispensable.
Discussions with colleagues Shin Kee Chung, Yuan Liu, Qi Chu and Prof
Zhihui Du have been very beneficial. In reviewing this thesis, I would like to
thank Prof Ron Burman for his time and attention to detail.
Throughout my thesis, I have received help from the many professional
staff both at the UWA School of Physics, and the International Centre for
Radio Astronomy Research. I would like to thank Ian McArthur, Paul Ab-
bott, Jay Jay Jegathesan, Ruby Chan, Leanne Goodsell, Kathy Kok, Lee
Triplett, Micah Foster, Jeff Pollard, Michael Eilon, Mark Boulton and David
London for their professionalism.
The PhD experience would not have been the same (or as fun) if not
for my fellow students not already mentioned; Stefan Westerlund, Sunil Su-
smithan, Francis Torres, Zhu Xingjiang, Lucienne Dill, Timo Dill, Jacinta
Delhaize, Scott Meyer, Lee Kelvin, Morag Scrimgeour, Giovanna Zanardo,
Laura Hoppmann, Toby Potter, Mehmet Alpaslan, Florian Beutler, Rebecca
Lange, Jurek Malarecki, Gemma Anderson, Gar-Wing Truong and Chris
v

Perrella.
Other scientists that I have gained great insight from are; Jean-Charles
Dumas, Prof Ju Li, Eric Howell, Prof David Coward, Prof Gerhardt Meurer,
Prof Richard Dodson and Prof Chris Power.
Finally, I would like to thank the people of my personal life that have
helped me getting through the sometimes difficult experience of being a post-
graduate student. Although distant, I have counted on the support from my
family in Melbourne and New Zealand. So too have I from Wiebe & Shanti
Wilbers, whose friendship I consider close to family. Last but not least I
thank my wife, Shannon, for her patience and continuing support and love.
vi

Contents
Preface i
Abstract iv
Acknowledgements v
Table of contents x
List of figures xii
List of tables xiii
List of abbreviations xv
Useful formula xvii
1 Introduction 1
1.1 Background to gravitational waves . . . . . . . . . . . . . . . 2
1.2 Sources of gravitational waves . . . . . . . . . . . . . . . . . . 2
1.3 Indirect observation of gravitational waves . . . . . . . . . . . 6
1.4 Direct detection of gravitational waves . . . . . . . . . . . . . 7
1.5 Multi-messenger astronomy . . . . . . . . . . . . . . . . . . . 11
1.5.1 Gamma ray bursts . . . . . . . . . . . . . . . . . . . . 11
1.5.2 GRB triggered GW search . . . . . . . . . . . . . . . . 14
1.5.3 GW triggered EM search . . . . . . . . . . . . . . . . . 15
1.6 Motivation for low-latency GW detection method . . . . . . . 16
1.7 Goals of thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
vii

1.8 Outline of thesis . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 Gravitational Waves 21
2.1 Linearised gravity . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.1 Plane wave solution . . . . . . . . . . . . . . . . . . . . 23
2.1.2 Transverse traceless gauge . . . . . . . . . . . . . . . . 23
2.2 Detection of gravitational waves . . . . . . . . . . . . . . . . . 24
2.2.1 Noises in interferometer . . . . . . . . . . . . . . . . . 28
2.3 Inspiral gravitational waves . . . . . . . . . . . . . . . . . . . 30
2.3.1 Geometry of binary system . . . . . . . . . . . . . . . . 31
2.3.2 Orientation of the binary relative to an observer . . . . 34
2.3.3 Orbital frequency as a function of time . . . . . . . . . 37
2.3.4 Higher order multipole corrections . . . . . . . . . . . . 38
2.4 Inspiral waveform . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.4.1 Intrinsic and extrinsic parameters . . . . . . . . . . . . 43
2.5 Signal processing . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.5.1 Matched Filter . . . . . . . . . . . . . . . . . . . . . . 44
2.5.2 Inner product . . . . . . . . . . . . . . . . . . . . . . . 46
2.5.3 Template bank . . . . . . . . . . . . . . . . . . . . . . 47
2.5.4 Matched filter as a function of unknown time of coa-
lescence . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.5.5 Matched filter of unknown phase . . . . . . . . . . . . 49
2.5.6 Signal to noise ratio . . . . . . . . . . . . . . . . . . . 50
2.5.7 Discrete time domain filtering . . . . . . . . . . . . . . 51
2.5.8 Infinite Impulse Response Filter . . . . . . . . . . . . . 53
2.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3 Low-Latency GW Detection Method 57
3.0 Paper abstract . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.2 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.2.1 The Inspiral Waveform . . . . . . . . . . . . . . . . . . 62
3.2.2 Two-Phase Matched Filter . . . . . . . . . . . . . . . . 65
viii

3.2.3 Discrete Time Domain Filtering . . . . . . . . . . . . . 67
3.2.4 Infinite Impulse Response Filter . . . . . . . . . . . . . 68
3.2.5 Approximation to an inspiral waveform . . . . . . . . . 69
3.2.6 Summed Parallel IIR filtering . . . . . . . . . . . . . . 72
3.3 Implementation for Performance Testing . . . . . . . . . . . . 72
3.3.1 IIR bank construction . . . . . . . . . . . . . . . . . . 72
3.3.2 Detector Data Simulation . . . . . . . . . . . . . . . . 73
3.3.3 Detection Efficiency . . . . . . . . . . . . . . . . . . . . 75
3.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.4.1 Inspiral Waveform Overlap . . . . . . . . . . . . . . . . 76
3.4.2 Ability to Recover SNR . . . . . . . . . . . . . . . . . 77
3.4.3 Detection Efficiency . . . . . . . . . . . . . . . . . . . . 78
3.5 Summary and Discussion . . . . . . . . . . . . . . . . . . . . . 80
3.6 Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . 81
3.7 Noise Spectral Density . . . . . . . . . . . . . . . . . . . . . . 82
4 Multi-rate SPIIR method 83
4.1 Multi-rate SPIIR filtering . . . . . . . . . . . . . . . . . . . . 83
4.2 Multiple templates . . . . . . . . . . . . . . . . . . . . . . . . 87
4.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5 Offline SPIIR pipeline 91
5.1 The SPIIR application . . . . . . . . . . . . . . . . . . . . . . 93
5.1.1 Internal structure of gstlal iir inspiral . . . . . . . 94
5.2 Data for offline run . . . . . . . . . . . . . . . . . . . . . . . . 98
5.3 IIR Bank generation . . . . . . . . . . . . . . . . . . . . . . . 100
5.4 Simulated inspiral signals . . . . . . . . . . . . . . . . . . . . . 103
5.5 Behaviour in non-Gaussian data . . . . . . . . . . . . . . . . . 105
5.6 Ranking triggers . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.7 The offline SPIIR pipeline . . . . . . . . . . . . . . . . . . . . 110
5.8 Confirmation of false alarm rate estimation . . . . . . . . . . . 112
5.9 Sensitivity of search . . . . . . . . . . . . . . . . . . . . . . . . 113
5.10 Parameter Estimation . . . . . . . . . . . . . . . . . . . . . . 117
ix

5.11 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
6 Online SPIIR pipeline 123
6.1 SPIIR online pipeline . . . . . . . . . . . . . . . . . . . . . . . 125
6.1.1 GraCEDb . . . . . . . . . . . . . . . . . . . . . . . . . 127
6.2 LIGO’s second engineering run . . . . . . . . . . . . . . . . . 129
6.3 Analysis setup . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
6.4 ER2 search parameter space . . . . . . . . . . . . . . . . . . . 133
6.5 Results of search . . . . . . . . . . . . . . . . . . . . . . . . . 137
6.6 Blind software injections . . . . . . . . . . . . . . . . . . . . . 142
6.7 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
7 Conclusion 149
7.1 Thesis motivation . . . . . . . . . . . . . . . . . . . . . . . . . 149
7.2 Thesis aim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
7.3 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Bibliography 157
x

List of Figures
1.1 Gravitational wave spectrum. . . . . . . . . . . . . . . . . . . 4
1.2 Operating schedule for GW detectors . . . . . . . . . . . . . . 9
1.3 Volume of space seen by LIGO . . . . . . . . . . . . . . . . . . 10
2.1 Schematic of GW detector interferometer . . . . . . . . . . . . 25
2.2 Sky coordinates of incoming GW relative to detector frame . . 26
2.3 Best strain sensitivities (ASD) for initial LIGO . . . . . . . . . 30
2.4 Binary coordinate system . . . . . . . . . . . . . . . . . . . . 32
2.5 Binary coordinate system with respect to an observer . . . . . 35
2.6 Trajectories of compact binary coalescence . . . . . . . . . . . 40
3.1 A schematic overview of the SPIIR method . . . . . . . . . . . 61
3.2 Flow chart of digital single-pole IIR filter . . . . . . . . . . . . 69
3.3 Illustrative diagram of summed sinusoids . . . . . . . . . . . . 71
3.4 Overlap as a function of number of sinusoids . . . . . . . . . . 76
3.5 Example SPIIR output . . . . . . . . . . . . . . . . . . . . . . 77
3.6 ROC curve of IIR method . . . . . . . . . . . . . . . . . . . . 79
4.1 Multirate SPIIR . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.2 Multirate multi-template SPIIR . . . . . . . . . . . . . . . . . 89
5.1 Flow of data through gstlal iir inspiral . . . . . . . . . . 95
5.2 Segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.3 IIR template bank generation . . . . . . . . . . . . . . . . . . 100
5.4 Parameter space . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.5 Offline IIR overlap . . . . . . . . . . . . . . . . . . . . . . . . 103
xi

5.6 Chi-square-SNR distribution . . . . . . . . . . . . . . . . . . . 107
5.7 Post-gstlal iir inspiral procedure . . . . . . . . . . . . . . 111
5.8 Inverse FAR distribution . . . . . . . . . . . . . . . . . . . . . 113
5.9 Detection efficiency . . . . . . . . . . . . . . . . . . . . . . . . 115
5.10 Search Volume . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.11 Search Range . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.12 Chirp mass accuracy . . . . . . . . . . . . . . . . . . . . . . . 119
5.13 Time accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
6.1 Flow of online pipeline . . . . . . . . . . . . . . . . . . . . . . 128
6.2 Low-latency data transfer . . . . . . . . . . . . . . . . . . . . 131
6.3 Online analysis DAG . . . . . . . . . . . . . . . . . . . . . . . 133
6.4 ER2 Parameter space . . . . . . . . . . . . . . . . . . . . . . . 134
6.5 Online IIR overlap . . . . . . . . . . . . . . . . . . . . . . . . 135
6.6 Number of IIR filters . . . . . . . . . . . . . . . . . . . . . . . 137
6.7 False alarm rate . . . . . . . . . . . . . . . . . . . . . . . . . . 139
6.8 Event rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
6.9 Latency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
6.10 Latency histogram . . . . . . . . . . . . . . . . . . . . . . . . 142
xii

List of Tables
1.1 List of known neutron star-neutron star systems . . . . . . . . 7
2.1 Intrinsic and extrinsic inspiral parameters . . . . . . . . . . . 43
2.2 Approximate template duration . . . . . . . . . . . . . . . . . 53
4.1 Computational cost of the multi-rate SPIIR method . . . . . . 87
6.1 Simulated injections . . . . . . . . . . . . . . . . . . . . . . . 144
xiii

xiv

List of abbreviations
ASD amplitude spectral density
EM electromagnetic
ER2 Engineering Run 2
GraCEb Gravitational-wave Candidate Event Database
GRB gamma-ray burst
GW gravitational waves
gwf Gravitational wave frame (files)
ISCO innermost stable circular orbit
LAL LIGO Algorithm Library
LIGO Laser Interferometer Gravitational-wave Observatory
LLOID Low-Latency On-line Inspiral Data
MBTA Multi-Band Template Analysis
NS neutron star
PSD power spectral density
SNR signal to noise
xv

xvi

Useful formulae
Quantity Formula UnitStrain h = ∆L/L unitlessGeometrized solar mass T = GM/c3 timeTotal mass M = m1 +m2 massReduced mass µ = m1m2/M massChirp mass M = η3/5M massSymmetric mass ratio η = m1m2/M
2 unitless
ISCO frequency fISCO = c3/(6√
6πGM)
hertz
xvii


Chapter 1
Introduction
In this introduction chapter, I will describe why there is a scientific need for a
new method to detect perturbations of space-time in real-time and with little
delay — i.e low-latency. Firstly I will introduce the predictions of Einstein’s
general theory of relativity, including the propagation of the perturbations,
commonly known as gravitational waves (GWs). A discussion of potential
sources will follow, noting that perhaps the most promising candidate for de-
tection will be GWs from the inspiral phase of solar mass coalescing compact
binaries. Detecting the inspiral phase of GWs produced by low-mass coalesc-
ing compact binaries with low-latency will be the focus of this thesis. The
confidence of the existence of GWs will be described by detailing their indi-
rect observation. The latest efforts to detect GWs directly will be outlined,
with an emphasis on the next generation ground based laser interferometer
detectors, which are expected to have an unprecedented level of sensitivity.
The scientific benefit of directly detecting the presence of GWs in real-time
and with a low-latency processing time will be demonstrated by describing
the GW sources that may have transient electromagnetic counterparts. The
goals of this thesis will be stated, and an overview of the rest of the thesis
will be given, describing the lay-out of the research done.
1

2 CHAPTER 1. INTRODUCTION
1.1 Background to gravitational waves
Einstein’s general theory of relativity is a remarkable improvement to the
Newtonian theory of gravitation. So far, general relativity has accounted
for all the observations of both the special theory of relativity and Newton’s
law of gravitation, and additionally explains observations that the Newto-
nian theory can’t. For example general relativity accurately accounts for the
previously unexplained precession of the perihelion (closest approach to the
Sun) of the planet Mercury. One of the early experimental confirmations of
general relativity occurred during a solar eclipse in 1919 when Eddington ob-
served the light from distant stars displaced by the Sun during a total eclipse
[5]. It was known as early as 1801 that Newtonian gravity would predict a
deflection, however this value was only half of that predicted by general rela-
tivity. Eddington’s observation was the definitive turning point in confirming
general relativity. Since then there have been many experiments that have all
verified general relativity to ever increasing accuracy [6]. Instead of describ-
ing gravity as an interaction between massive bodies at a distance, general
relativity describes space-time itself as curved. The curvature is caused by
the presence of matter, and can be specified by the Einstein field equations.
Most of the observations verifying general relativity have been made where
the curvature is slight, the so called weak field limit. One prediction of gen-
eral relativity is that the motion of non-spherically symmetric bodies with
a time-varying quadrupole moment will emit gravitational waves (GWs) —
perturbations or ripples of space-time. Only in the strong field limit, where
the curvature is the greatest are GWs likely to be detected.
1.2 Sources of gravitational waves
Gravitational radiation can be described (in an order of magnitude esti-
mate) as an analog of electromagnetic (EM) radiation. For EM radiation,
the power outputted is proportional to the second time derivative of the elec-
tric and magnetic multipole moments. The strongest EM moment is the elec-
tric dipole moment, followed by the magnetic dipole moment and the electric

1.2. SOURCES OF GRAVITATIONAL WAVES 3
quadrupole moment. In the gravitational analog, mass moments of inertia are
analogous to the electric and magnetic moments. Hence the strongest source
of gravitational radiation would be the second time derivative of the mass
dipole, which is the change in total momentum. But this must vanish due to
the conservation of momentum. The next strongest type of radiation is the
gravitational analog of the magnetic moment, the total angular momentum.
The second time derivative of this moment also vanishes due to the conserva-
tion of angular momentum. To produce any kind of GW, a source must have
a time-varying mass quadrupole moment I, i.e., have a non-axisymmetric
time-varying mass distribution. It can be shown that the power outputted
by a GW is proportional to (G/c5)...I 2 [3]. A very large quadrupole moment
will be required to overcome the very small G/c5 ∼ 10−53 W−1 factor. Hence
any terrestrial or laboratory generation of GWs is very unlikely (see Section
36.3 of [3] for a good example of why). However a large quadrupole moment
comparable to c5/G can be expected when studying astrophysical systems
where the quadrupole moment is relativistic, i.e. v approaches c.
As the GWs propagate outwards from their source they distort local
space-time by alternately stretching and squeezing it. The frequency of the
stretching and squeezing is known as the gravitational wave frequency, and
the fractional distortion change the strain, commonly denoted by the sym-
bol h. In general GW scientists classify four main types of astrophysical
gravitational wave sources characterised by their expected GW signature, or
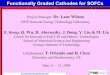
gravitational waveform. Figure 1.1 shows the spectrum of expected gravita-
tional wave sources and the sensitive bandwidths of proposed and existing
GW detectors. Details of how ground-based GW detectors operate will be
given in Section 2.2.
As we will show, of the four different sources of GWs, those from solar
mass coalescing compact binaries are perhaps the most promising source for
detection since their gravitational waveform is known to high precision, and
they have a GW frequency that enters the sensitive bandwidth of ground
based GW detectors. Detection of GWs from the inspiral phase of com-
pact binary coalescence will be the primary focus of this thesis. A thorough
derivation of the inspiral gravitational waveform will be given in Section 2.3.

4 CHAPTER 1. INTRODUCTION
Figure 1.1: Gravitational wave spectrum. The amplitude spectral density(strain) of different sources of GWs are shown as a function of their fre-quency. The sensitivity limits of three different kinds of GW detectors:the radio telescope based Parkes Pulsar Timing Array (PPTA), the pro-posed satellite mission Laser Interferometer Space Antenna (LISA) and theground based Laser Interferometer Gravitational-wave Observatory (LIGO)are shown. Credit: PPTA Collaboration [7].
For now, a qualitative description of the four main sources follows:
Compact Binary Coalescence/Inspiral One example of transient source
of GWs is that of two closely orbiting compact (dense) bodies. As the
bodies orbit each other, there is a large time varying mass quadrupole
moment, from which general relativity predicts that GWs will be emit-
ted by the system. The GWs carry energy away from the binary system
and, to obey the conservation of energy, the orbital separation of the
two bodies decreases, as does the orbital period. The frequency of the

1.2. SOURCES OF GRAVITATIONAL WAVES 5
GW emitted is directly related to the orbital frequency, which is mono-
tonically increasing in time as the orbital separation shrinks. This is
known as the inspiral phase and the waveform predicted is sometimes
called a chirping waveform. As the bodies coalesce, the amplitude of
the gravitational strain h increases approximately as a power law with
time. Given the intrinsic parameters of the system (e.g. component
masses) the inspiral gravitational waveform can be modelled analyt-
ically with a high degree of accuracy using post-Newtonian methods
[8, 9, 10]. The inspiral gravitational waveform will be derived in Sec-
tion 2.3. It is predicted that beyond a boundary known as the inner-
most stable circular orbit, the bodies will plunge in toward each other
and cataclysmically merge (the merger phase). Finally, the resulting
mass will oscillate in the ringdown phase. The entire process is called
compact binary coalescence.
Examples of compact bodies are neutron stars (NS), black holes (BH)
and white dwarfs. A typical NS has a mass roughly equivalent to our
Sun, but a radius on the order of 10 kilometres. The masses of the bod-
ies will dictate the particular signature of the inspiral phase (described
in detail in Section 2.3). For NS-NS binaries (with component masses
around 1− 3M), the GW frequency near coalescence will be around
102 − 103 Hz. For BH-NS or BH-BH binaries, the GW frequency will
be much lower.
Burst Any other transient GW signal of short duration is called a GW
burst event. Generally the morphology of the signal is highly uncertain.
There are a variety of potential sources; for example the non-symmetric
core collapse of a supernova or NS glitch (such as a starquake), or
perhaps the merger phase of a compact binary coalescence event. See
[11, and references therein] for a review on burst sources and how GW
analysts search for them.
Continuous wave Any source of GWs that produces a quasi-monochromatic
gravitational waveform signal and is distinguishable from the back-
ground is called a continuous wave source. An example of a continuous

6 CHAPTER 1. INTRODUCTION
source could be a rapidly rotating NS that has a slight non-spherical
distortion. As NSs are compact objects that spin very fast, any slight
non-axisymmetric symmetry would produce a very strong quadrupole
radiation. For a full review of continuous wave sources see [12, and
references therein].
Stochastic background As the EM spectrum has a background of unre-
solved sources, so one would expect something similar for the GW
spectrum. This background could have originated from cosmologi-
cal sources such as inflation, cosmic strings and pre-Big-Bang models.
GWs from Galactic white-dwarf binaries or slow spinning Galactic pul-
sars could also account for a stochastic background. Searches to define
this background are generally done by cross-correlating the strain data
recorded from different GW detectors. See [13, 14, 15, 16] for important
stochastic background searches.
1.3 Indirect observation of gravitational waves
The first observational evidence of the existence of GWs came from a double
neutron star (NS-NS) system. The pulsar binary system PSR B1913+16
was discovered and observed by Russell Hulse and Joseph Taylor [17]. Radio
observations of the pulsar indicated that it is in a binary system, where the
companion body is another NS, and has an orbital period of 7.75 hr. Decades
of observing the timing of the radio pulses showed that orbital period is
slowing with a rate of decrease within 0.2% of the rate predicted by general
relativity [18, 19]. This discovery earned Hulse and Taylor the 1993 Nobel
Prize in Physics.
Although this indirect detection of GWs is significant in verifying general
relativity, indirect detection in this way relies solely on serendipity — to
discover this system, at least one NS had to be a pulsar with its beaming angle
passing the Earth. To date, there have been only six confirmed discoveries of
NS-NS systems [20]. Table 1.1 gives details of them. Although the effect of
period decrease can be attributed with high accuracy to that predicted by the

1.4. DIRECT DETECTION OF GRAVITATIONAL WAVES 7
Table 1.1: List of known neutron star-neutron star systems
PSR Yeardiscov-ered
OrbitalPeriod( hr)
m1
( M)m2
( M)Distance( kpc)
Reference
B1913+16 1974 7.75 1.4398 1.3886 9.9 [18, 21]B1534+12 1991 10.1 1.3332 1.3452 1.02 [22, 23]B2127+11C 1991 8.05 1.358 1.354 9.58 [24, 25]J0737-3079 2003 2.45 1.24 1.35 0.5-0.6 [26]J1756-2251 2005 7.67 1.40 1.18 2.5 [27]J1906+0746 2006 3.98 1.248 1.365 5 [28]
generation of GWs, the frequency of the signal is outside the bandwidth of
ground based GW detectors. As will be shown in Section 2.3, the amplitude
of the strain increases when the binary is close to coalescence. However none
of the known NS-NS systems will coalesce for at least a few millions of years.
There have been many studies into the actual coalescence rate of compact
binaries (see [29, references therein]). Coalescence rates are usually quoted
in either per Milky Way Equivalent Galaxy per Myr or per Mpc3 per Myr.
There are significant uncertainties in the astrophysical rates of compact bi-
nary coalescence estimates owing to the small sample size of known galactic
NS-NS binaries and poor constraints for population-synthesis models. At
present, the latest estimate is 1 per Myr per Mpc3 [29, 30]. The actual de-
tection rate will depend on the properties of the GW detection instrument(s)
used. It must be noted that the uncertainties can amount to 1 or 2 orders of
magnitude, hence making statements about the expected number of events
observed highly variable.
1.4 Direct detection of gravitational waves
The trouble with measuring the strain is that for a category of sources in
the nearby universe h ∼ 10−22! So far, there has been no direct detection of
GWs by measuring the strain h.
Despite the incredibly small strain h predicted by general relativity, there
has been concerted worldwide effort to directly detect GWs over the last 50

8 CHAPTER 1. INTRODUCTION
years. The first generation of GW detectors built in the 1960s and 1970s were
solid metal cylindrical bars — so called bar detectors. First built by Joesph
Weber [31], these bar detectors were isolated from the effects of the sur-
rounding environment by using seismic isolation suspensions inside vacuum
chambers to prevent acoustic interference. Piezoelectric transducers were
glued to the surface of the bar designed to measure any vibrations induced
in this driven harmonic oscillator by GWs (results in [31, 32]). Weber’s re-
search spurred on much activity in this field, and soon several groups around
the world built their own bar detectors.
Later a different kind of technology was built to analyse the minute differ-
ence in length a GW causes. This was based on Michelson laser interferome-
ters. This kind of GW detector is designed to measure the actual differential
fractional change in arm length as opposed to the amplitude of oscillations
induced in the bar detectors. More details on how interferometric GW de-
tectors operate, and their sources of noise, will be given in Section 2.2. GW
detectors built as interferometers are known as second generation. The first
interferometer built for detection of GWs had arm lengths of one metre [33].
However this detector was too small to have a sensitivity that could measure
typical GWs [34].
Several ground based kilometre scale GW interferometric detectors have
been built in the US and Europe. The US effort, known as the Laser In-
terferometer Gravitational-wave Observatory (LIGO [35]) has built two 4
kilometre long Michelson interferometers in Hanford, Washington, and Liv-
ingston, Louisiana [36]. The French/Italian consortium Virgo [37] has built a
3 kilometre interferometer near Cascina, Italy [38]. There is also the smaller
300 metre TAMA300 detector based at the Tokyo Astronomical Observa-
tory, Japan [39]. The sensitivity of this detector not as high as the larger
LIGO/Virgo detectors, but aims to act as a test bed for developing advanced
detector hardware. Similarly, there is also the 600 metre GEO600, built by
the German/British and located outside of Hannover, Germany [40].
With arms on the kilometre scale, these type of detectors have a sensi-
tive bandwidth in the 40 Hz–2000 Hz range. This is because they have been
optimised for detecting GWs from compact binary coalescence events where

1.4. DIRECT DETECTION OF GRAVITATIONAL WAVES 9
the binary sources have masses in the range of 1M–20M(i.e. NS-NS and
NS-BH binaries). The first configuration of the LIGO detectors, known as
initial LIGO was built in the late 1990s/early 2000s. There have since been
six science runs, known as S1, S2, etc. The inaugural S1 ran for 17 days in
2002, and data was collected from both LIGO detector sites [41]. Since then
subsequent science runs with ever increasing sensitivities have taken place
[42], some in coincidence with GEO600, TAMA300 and Virgo detectors. For
an overview of the operating schedule, see Figure 1.2. For a complete list
of publications by the LIGO Scientific Collaboration including observational
results and conference proceedings, see [43] and the the LIGO document
control center [44].
Figure 1.2: The operating schedule of the various ground-based GW detectorsin the initial detector era. Credit: [45]
Currently both the LIGO and Virgo detectors are offline, as they are
undergoing a major hardware change to the advanced detector configuration.
Both the Advanced LIGO[46] and Advanced Virgo [47] are expected to be
operational from 2015. Once built, Advanced LIGO is expected to have a
10 fold sensitivity improvement compared to initial LIGO [48]. Hence in the
era of advanced detectors GWs produced from compact binary coalescence
events will be detectable within a volume of space one thousand times larger
than that of initial LIGO, out to ∼200 Mpc–300 Mpc [49] (see Figure 1.3).
With this increase in sensitivity the estimated detection rate for GWs from
NS-NS binaries could be between 1 and 400 per year (see table 5 of [29] for

10 CHAPTER 1. INTRODUCTION
Figure 1.3: The volume of space that Advanced LIGO is sensitive to isexpected to be ten times that of initial LIGO. Credit: [50, 51]
a full discussion on the difficulties of predicting detection rates).
A number of other gravitational wave detection experiments are either
underway or planned. A pulsar timing array measures the arrival time dif-
ferences of pulses emitted from millisecond pulsars due to GWs (e.g. [52]).
The sensitive bandwidth of this experiment is in the low frequency regime of
10−9 Hz–10−6 Hz. There are also proposals for a space based laser interfer-
ometer, for example the eLISA mission [53]. This experiment would have a
sensitive bandwidth in the 10−4 Hz–10−1 Hz range.

1.5. MULTI-MESSENGER ASTRONOMY 11
1.5 Multi-messenger astronomy
With the imminent detection of GWs, scientists have begun to ask what sort
of EM counterparts are coincident with a GW event [54]. Connecting the
detection of a GW event with an EM counterpart will break the degeneracy
of inferred binary parameters (for GWs from compact binary coalescence
events). Observing GWs that originate from extra-Galactic host galaxies
will give a measure of absolute distance, thereby allowing an independent
measure of the Hubble constant [54, 55, 56, 57, 58, 59, 60, 61]. Perhaps one
of the most promising EM counterparts of a compact binary coalescence event
is that of gamma ray bursts (GRBs). So called “multi-messenger” astronomy,
where both GW and EM information are collected, will give maximum insight
to the physics of such highly energetic events.
1.5.1 Gamma ray bursts
In this section I briefly summarise the observations and basic underlying
models that cause GRBs. For excellent reviews on the topic of GRBs, see
[62] and [63].
Gamma ray bursts (GRBs) are intense flashes of γ-rays in the MeV band,
that for a short time radiate in an otherwise empty γ-ray sky. The flash over-
whelms any other γ-ray source, including the Sun. GRBs were first observed
between 1969 and 1972 by the Vela military satellites designed to monitor vi-
olations of the nuclear test ban treaty [64]. However it was quickly discovered
that the bursts were coming from not the Earth, but the opposite direction,
the sky. Over the next decades, a series of satellites was launched to observe
this new astrophysical phenomenon, and many theoretical models of GRBs
were founded to explain the observations (see [62] for a complete history).
However it was not until the 1991 launch of the Compton Gamma Ray Ob-
servatory [65] (see [66] for results) that greater insight was obtained. On
board, the Burst and Transient Source Experiment detected more than 3000
isotropically distributed bursts, suggesting a cosmological rather than Galac-
tic distribution. Later, in 1996 the Beppo-SAX [67] satellite was launched,
and was able to localise the X-ray emission from some GRBs. It also dis-

12 CHAPTER 1. INTRODUCTION
covered the previously predicted “afterglow”, which appears as fading softer
X-ray, optical and radio emissions [68]. This in turn allowed host galaxies to
be identified, and redshifts to be observed. The High-Energy Transient Ex-
plorer (HETE-2) satellite [69] was launched in 2000, and continued providing
afterglow positions.
Further advances were made after the 2004 launch of the Swift satel-
lite [70] due to its onboard array of multi-wavelength instrumentation, and
greater sensitivity. Upon detecting a GRB, it is able to rapidly (within about
100 s) slew to the direction of the source, and record multi-wavelength spec-
tra and light curves. The most recent GRB satellite to be launched was the
Fermi [71] mission in 2008, which has provided the most powerful window
into these high energy events. Other operating GRB satellites are the Eu-
ropean space agency’s International Gamma-Ray Astrophysics Laboratory
[72] launched 2002, and Astrorivelatore Gamma a Immagini Leggero [73]
launched in 2007.
Despite some recent classification issues [74], there is enough evidence to
show that GRBs can be divided into two distributions based on their dura-
tion [75]. Those with burst durations longer than 2 seconds are characterised
as long soft GRBs, and those with durations less than 2 seconds are char-
acterised as short hard GRBs. The two populations are thought to have
different progenitor models:
Long GRB It has been thought that the core collapse of a rapidly rotating
massive star could be the progenitor of long GRBs [62, 76, 77].
Short GRB Merging compact bodies (NS-NS or BH-NS) have been pro-
posed as the progenitors of short GRBs (e.g. [63, 78, 79, 80, etc]
amongst others). Following the coalescence of the binary system, where
the characteristic inspiral GW signal is produced, the two bodies merge,
and form an accretion disk around a central body (perhaps a black hole)
(see [81] and references). The rapid accretion (<1 s [54]) powers a col-
limated relativistic jet, which produces a GRB. The creation of this
central engine launches a relativistic outflow of energy 1048 erg–1050 erg
on timescales of 0.1 s–1 s. This scenario has been computationally con-

1.5. MULTI-MESSENGER ASTRONOMY 13
firmed by [81]. The delay between the final GW emission and the onset
of the GRB is estimated to be as short as 0.1 seconds or as long as tens
to hundreds of seconds [82, 83].
With the discovery beginning in 1997 of optical afterglows from GRBs
[84], an internet distribution service was created to automatically send out
alerts to interested parties for follow-up observations. The GRB Coordinates
Network was based on the coordinates and distribution network from the
earlier Burst and Transient Source Experiment [85], and has enabled many
afterglow emissions to be observed by ground based telescopes.
The afterglow is thought to arise from the collision of the relativistic
expansion of ejecta into the surrounding medium. As the shock wave decel-
erates though the medium, the EM afterglow becomes progressively weaker,
decaying on the order of hours, though the radio afterglow may last for weeks
[63].
The first detection of a prompt optical emission was made by the Robotic
Optical Transient Search Experiment (ROTSE)[86]. Since then, a number of
prompt optical emissions or flashes have been observed in long GRBs [87].
Here prompt emission refers to observations made when the GRB is still
active. One theory is that EM emissions associated with GRBs occur when
outgoing matter collides with the matter ejected by earlier shocks (see [62,
and references therein]). This can potentially create a reverse shock, and
produce a bright prompt optical flash in a single burst of very short duration
[88].
Consider that to observe the rapidly decaying and not very bright optical
flash of any GRB, one must already have a telescope pointing a direction that
has the flash within its field of view, or the telescope must slew to the loca-
tion provided by a pre-existing trigger. Although the former is not likely to
occur, this is exactly what happened in the particular case of GRB 080319B.
Two wide field instruments “Pi of the Sky” and Tortora were observing the
afterglow of GRB 080319A when by chance, another GRB, GRB 080319B
occurred sufficiently close in time (∼30 minutes) and sky location (∼10 )
[89]. The optical emission was quickly variable, rising within 10 seconds after
the beginning of the GRB, and lasted for about 50 seconds [87].

14 CHAPTER 1. INTRODUCTION
However, in general, to catch the prompt emission of a GRB requires
fast moving telescopes responding to triggers. Conventional astronomical
telescopes are not designed to make rapid, follow up searches. However since
the invention of the GRB Coordinates Network in 1997, several specialised
rapidly moving robotic ground-based telescopes (e.g. ROTSE, Telescopes a
Action Rapide pour les Objets Transitoires (TAROT) [90], Zadko [91]) and
wide field cameras have been developed for this purpose.
Roughly one quarter to a half of all observed short GRBs are followed
by an X-ray emission beginning ∼10 s after the initial GRB and lasting for
hundreds of seconds [92]. Moreover, it was recently discovered that some
short GRBs are followed by an X-ray “plateau”, which is not expected from
the standard fireball model describing GRBs [93, 94, 95]. Hence the scientific
benefits of EM-GW coincident detection can be based on the following ideas:
• GW observations of a short GRB could confirm the central engine of
the GRB to be an inspiral event
• multi-wavelength EM emission associated with the prompt emission
of GRB will lead to a better understanding of the central engine and
provide physical conditions to improve the models describing the un-
derlying processes
In order to make the connection between the two, one must either use the
GRB to a trigger a GW search, or use a GW detection to trigger an EM
follow-up.
1.5.2 GRB triggered GW search
Considering that both progenitor models of short and long GRBs have GW
emission, there have been several studies performed using EM observations
as triggers to search for coincident GW events in both LIGO and Virgo data
[36, 96, 97, 98, 99, 100, 101, 102, 103]. GRB-triggered searches have targeted
GWs produced from both inspiral and burst sources. These studies have
adopted a time window of a few minutes for long GRBs, and a few seconds
for short GRBs around the GRB trigger time. It has been estimated that

1.5. MULTI-MESSENGER ASTRONOMY 15
triggered searches will increase the sensitivity of GW detectors by about 50%
and the detection rate will increase by a factor of 3 [104].
Two specific cases, those of the discovery of short GRB 070201 [98, 105]
and GRB 051103 [103, 106] are quite interesting in that the GRB location
overlapped nearby galaxies (M31 and M81 respectively). A NS-NS merger
would be detectable if it occurred within this time period at this distance. In
both cases, a NS-NS binary merger was ruled out with very high confidence.
1.5.3 GW triggered EM search
Since the γ-ray emissions from GRBs is likely beamed [54], not all compact
binary coalescence events may have an observable GRB counterpart. How-
ever their optical and perhaps radio afterglows may be observable off axis,
although it may be somewhat dimmer. Indeed, such an observation would
yield a confirmation of the jet model, show the beaming distribution and
greatly help theoretical models of relativistic outflows [107, and references
therein].
A GW triggered GRB search would entail first localising the source di-
rection. Even with optimistic configurations of a worldwide GW detector
network, the error box could be as large as tens of square degrees [54, 108,
109, 110, 111]. However this large sky error-area can be partially mitigated
by restricting counterpart searches to transients that occur within nearby
galaxies that are within the LIGO-Virgo horizon distance [112].
This idea was first explored by the Locating and Observing Optical Coun-
terparts to Unmodelled Pulses in GW study [113]. During the latest LIGO-
Virgo run (S6/VSR3) in 2010, there were several GW search detection pipelines
operating with the goal of using GW detection as triggers to send out as-
tronomical alerts. These were Coherent WaveBurst, Omega and Multi-Band
Template Analysis (MBTA) [114, 115, 116]. Both Coherent WaveBurst and
Omega were searches for un-modelled burst sources based on time-frequency
analysis.
An important concept here is the notation of low-latency GW detection.
Here the term latency is defined as the time between finding a GW signal in

16 CHAPTER 1. INTRODUCTION
the detector’s data and the (wall clock) time that the GW passed through
the detector. This time needs to be as short as possible so that the fading
optical counterpart can be observed. In this thesis, we aim to produce an
inspiral search pipeline that can achieve sub-minute latencies.
1.6 Motivation for low-latency GW detection
method
In the history of LIGO, inspiral GW search strategies have primarily fo-
cused on accurate detection of GW events. As will be shown in Chapter 2,
traditional inspiral searches are based on cross-correlating expected inspiral
waveforms and the detector data. In general, this process is computationally
expensive. The computational cost can be reduced by using Fourier domain
correlations. However this necessarily introduces a latency and the analysis
is usually done offline.
As we move toward the advanced detector era where the sensitivity of
the detectors increases, searches for longer inspiral waveforms will demand
significantly more computational resources.
Recently two independent GW search methods have been developed to
search for inspiral signals with low-latency. The Virgo group has produced
the low-latency pipeline MBTA [116], and LIGO is also working on a new
method, Low-Latency On-line Inspiral Data (LLOID) analysis method [117].
A latency of less than 3 minutes until the availability of a trigger using
the MBTA pipeline has been achieved in initial LIGO data [116]. The
LLOID pipeline achieves low-latency by reducing the computational cost of
the pipeline using a number of strategies discussed in [117, 118].
Observing the EM counterparts of GRBs will lead to a greater scientific
understanding of the underlying physics by constraining models describing
the them. The scientific questions posed in the previous section can be
ultimately answered by first implementing a low-computational resource GW
inspiral search pipeline that can send out GW triggers with low-latency.

1.7. GOALS OF THESIS 17
1.7 Goals of thesis
This thesis will focus on developing and implementing a new low-latency
time-domain detection pipeline capable of detecting inspiral GW signals from
the coalescence of NS-NS binaries. The construction and implementation
of this pipeline will enable the rapid response robotic telescopes to make
complete observations of the transient EM counterparts. This will ultimately
lead to scientific questions being answered about the nature of such highly
energetic events.
The primary goals of this thesis are to;
1. demonstrate the need for a low-latency gravitational wave search pipeline,
2. develop a new low-latency search pipeline with low computational cost,
3. demonstrate capabilities of this pipeline,
4. present results of the pipeline as applied to realistic GW detector data,
5. achieve sub-minute GW triggers for EM follow-up observations.
1.8 Outline of thesis
The layout out the remaining parts of this thesis are as follows,
• Chapter 2 will define the common mathematical conventions and con-
cepts that will contribute to the development of a new low-latency
search pipeline. This chapter serves as a reference for the rest of the
thesis. First, taking inspiration from Chapter 2 of [1], a rigorous deriva-
tion of the inspiral gravitational waveform is shown. This derivation
is not original, but is presented here in order to make clear the prop-
erties of the inspiral gravitational waveform. The notion of intrinsic
and extrinsic parameters of the compact binary coalescence event will
be discussed, which paves the way to understand how such signals are
searched for. As a reference, the traditional (and optimal) strategy for
searching for the inspiral waveforms in Gaussian detector data will be

18 CHAPTER 1. INTRODUCTION
shown. Finally, there will be a short introduction on digital time do-
main filters, so that the reader has a better understanding of the basic
components used for the development of the new low-latency pipeline.
• Chapter 3 will introduce the theoretical strategy my collaborators and
I have developed to address the issues for a new low-latency pipeline.
Once I have demonstrated the proof of concept of the strategy, the new
method is tested by searching for a single canonical inspiral waveform
in mock Gaussian detector data. The introduction of the method and
the tests were published in [119]. Hence the major part of this chapter
will be [119] in its entirety.
• Chapter 4 is a short chapter detailing some changes made to the method
introduced in Chapter 3. It will show the significant computational cost
improvements that can be made by modifying the basic implementation
of the method.
• Chapter 5 will focus on the realisation of the pipeline through imple-
mentation to the common software environment available to the wider
GW scientific community. Attention will be given to the details of
this implementation. The newly realised pipeline will be tested by
searching for inspiral GW signals with a variety of parameters in both
mock Gaussian detector data, and previously recorded LIGO science
run data. The latter is a necessary step in addressing the capabilities
of the pipeline in non-Gaussian noise. Both tests are performed offline.
This will allow the pipeline to be tested by injecting many simulated
inspiral signals with different parameters. From this, a discussion will
be made about the detection efficiency of the pipeline and the ability
to estimate signal parameters will follow.
• Chapter 6 will demonstrate the ability of the new pipeline to search for
inspiral GW signals in online detector data. The detector data here are
part of LIGO/Virgo’s second engineering run, which began on July 18
2012 and ended on August 8 2012. This run provided an opportunity
to test the online and low-latency capability of the pipeline. Results

1.8. OUTLINE OF THESIS 19
from the run will be presented and a discussion of its the ability and
shortcomings will ensure. The ultimate aim of this thesis, achieving
low-latency GW triggers for further EM follow-up, will be addressed in
this chapter.
• Chapter 7 will review and discuss the implementation of the new pipeline,
and the performance on both offline and online detector data. In this
chapter there will also be a discussion on what can be done to improve
the pipeline. There have also been several side studies that have used
this pipeline that will be discussed.

20 CHAPTER 1. INTRODUCTION

Chapter 2
Gravitational Waves
The aim of this chapter is to introduce all the physical and mathematical
concepts that will be used to create a new low-latency inspiral search pipeline
derived and tested in later chapters. The rigorous derivation of the inspiral
gravitational waveform here is inspired by Chapter 2 of [1]. Although the
derivation is not original, it is important to understand the concepts of the
inspiral gravitational waveform in order to design a new time-domain low-
latency algorithm. Readers familiar with inspiral GW data analysis may
wish to skip forward to Chapter 3, where the new low-latency method is first
introduced. Indeed, Chapter 3 was published as a self-contained article in
Physical Review D [119].
Firstly, in Section 2.1 the foundations on which GWs are based, linearised
gravity, will be discussed. For a more complete background on the funda-
mentals of GWs see [3], on which Section 2.1 closely follows. This will lead
to an understanding of how GWs can be detected directly using laser inter-
ferometers in Section 2.2. An explicit derivation of the inspiral gravitational
waveform will follow in Section 2.3. The way the waveform manifests in the
GW detector’s strain signal will be shown explicitly in Section 2.4. A dis-
cussion on how inspiral GWs are traditionally (and optimally) searched for
in detector strain data is covered in Section 2.5, as well as covering more
general signal processing concepts which will be useful in later chapters.
21

22 CHAPTER 2. GRAVITATIONAL WAVES
2.1 Linearised gravity
By introducing some small perturbation hµν to an otherwise flat space (the
Minkowski metric) ηµν , one has the metric tensor,
gµν = ηµν + hµν , (2.1)
where |hµν | 1. In the weak-field limit1, one can expand the Einstein field
equations in powers of hµν keeping only linear terms without much loss of
accuracy [3].
The Einstein field equations are the equations of general relativity that
form the link between the curvature of space-time and matter contained
within it:
Gµν =8πG
c4Tµν (2.2)
where Gµν is the Einstein tensor given by,
Gµν = Rµν − 12Rgµν (2.3)
and Rµν = Rγµνγ is the Ricci tensor and Tµν is the stress-energy tensor. By
introducing the tensor,
hµν ≡ hµν − 12ηµνh (2.4)
where h ≡ ηµνhµν , the linearised Einstein field equations can be expressed
as,
−h α
µν,α − ηµνhαβ
µν, + hα
µα, ν + hα
να, µ =8πG
c4Tµν . (2.5)
Without loss of generality, one can impose the gauge condition hα
µα, = 0
which reduces the above equation outside the source of the waves (i.e. where
1here we are describing the state of the space-time outside the source of GWs

2.1. LINEARISED GRAVITY 23
Tµν = 0) to
hα
µν,α = 0. (2.6)
2.1.1 Plane wave solution
An obvious solution to linearised field equations (2.6) is that of a monochro-
matic plane wave:
hµν = <[Aµνe
ikαxα]
(2.7)
where < [...] denotes the real part, A denotes the amplitude and kα denotes
the wave 4-vector satisfying
kαkα = 0 (2.8a)
Aµαkα = 0. (2.8b)
The first constraint states that kα is a null vector (and hence the wave travels
at the speed of light c), and the second constraint gives A as orthogonal to k.
There are six independent components ofA. However four degrees of freedom
can be removed by choosing a specific gauge, the transverse traceless gauge.
2.1.2 Transverse traceless gauge
Introducing the two gauge transformations,
Aµνuν = 0 (2.9a)
Aµµ = 0, (2.9b)
for any 4-velocity u that is the same throughout all space-time, results in
eight constraints onA in total. This can be seen by choosing a Lorentz frame

24 CHAPTER 2. GRAVITATIONAL WAVES
in a form where,
hµ0 = 0 only spatial components present (2.10a)
hkj,j = 0 spatial components divergence free (2.10b)
hkk = 0 spatial components are trace free. (2.10c)
Note there is no difference between hµν and hµν in this gauge. This choice
of gauge leaves any symmetric tensor satisfying the gauge conditions (2.10)
transverse, since it is purely spatial, and if described as a plane wave trans-
verse in the direction of propagation and traceless because the trace van-
ishes. Therefore any symmetric tensor satisfying the gauge conditions (2.10)
is called transverse traceless. In such a gauge form, the amplitude A takes
the form,
Aµν =
0 0 0 0
0 h+ h× 0
0 h× −h+ 0
0 0 0 0
(2.11)
where h+ and h× are the called plus and cross polarisation of the plane wave.
They take their name from the effect of a wave passing through a set of test
particles.
2.2 Detection of gravitational waves
As mentioned in Section 1.4, current generation GW detectors (such as the
LIGO/Virgo detectors) are based on kilometre scale Michelson interferome-
ters. A simple Michelson interferometer uses a laser pointed at beam splitter,
which in splits the light into two orthogonal directions. The light runs down
the two “arms” of the interferometer. At the end of the arms are suspended
test mass mirrors, which reflect the light back down each respective arm.
When the light comes back together, it will pass through the beam splitter
back to either the laser (the symmetric port) or towards a photo-detector

2.2. DETECTION OF GRAVITATIONAL WAVES 25
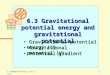
(the asymmetric port). See Figure 2.1 for a schematic of a simple Michelson
interferometer.
test mass
test mass
test mass
test mass
light storage arm
photodetector
laser
beamsplitter
light storage arm
Figure 2.1: A schematic diagram of the laser interferometer designed tomeasure GWs. A laser (rectangular box) in has its beam pointing toward abeam splitter. The beam splitter reflects the light down the one arm, andtransmits down the other arm. Each arm, of length L, is terminated by asuspended test mass mirror, which reflects the light back towards the beamsplitter. The light comes together in the beam splitter, going toward thelaser (symmetric port) and the photo-detector through the asymmetric port.Additional mirrors form a Fabry-Perot cavity, where the power of the lasercan increase. Credit [120].
The mirrors are test masses that are suspended in a free falling frame (for
Earth bound interferometers, the mirrors are under the gravitational effect
of the Earth, however it can be shown that the horizontal motion of the test
masses would be the same as if it were in a free falling frame). Choosing a
coordinate system for our interferometer, let us place mirror X on the x axis
initially a length L from the beam splitter, and mirror Y on the y axis also
initially a length L from the beam splitter. Let us define a polar coordinate
frame (θ, ϕ, ψ) to denote the direction of the incoming GW. Here θ it the
azimuthal angle from the x axis, ϕ the inclination from the normal to the

26 CHAPTER 2. GRAVITATIONAL WAVES
plane the arms lie in, and ψ is the polarisation angle which completes the
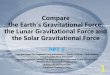
three Euler angles (see Figure 2.2).
x
y
j
Θ
Ψ
eΙ
eΦ
ej
eΘ
N
Figure 2.2: The three Euler angles (θ, ϕ, ψ) used to convert the frame of theGW radiation ( eι, eφ) to the x-y plane of the detector arms.
For the case of a purely + polarised GW with its source directly above
the plane of the detector (ϕ = 0) and its radiation frame aligned to the arms
of the detector (ψ = 0), the space-time interval between the beam splitter
and each test mass is
0 = gµνdxµdxν (2.12)
⇒ c dt2 = (1 + h+(t)) dx2 + (1− h+(t)) dy2 + dz2 (2.13)
where ds = 0 since the laser light is travelling along a null geodesic.
The distance LX,Y between the origin (beam splitter) and the test masses

2.2. DETECTION OF GRAVITATIONAL WAVES 27
X and Y as a plus polarised GW passes through will be,
LX(t) =
∫ L
0
√1 + h+(t) dx
≈ L
[1 +
1
2h+(t)
](2.14a)
LY (t) ≈ L
[1− 1
2h+(t)
](2.14b)
where the approximation is made assuming L to be much shorter than the
wavelength λ of the GW.
The phase Φ of the laser light accumulated along the length of the arm
on its return journey will be,
ΦX =
∫ L′
0
2π
λdx−
∫ 0
L′
2π
λdx
≈ 4πL
λ
(1 +
1
2h+
), (2.15a)
ΦY ≈4πL
λ
(1− 1
2h+
). (2.15b)
The phase difference between the two arms is,
∆Φ =4πL
λh+(t). (2.16)
Hence the detector can measure the strain,
h(t) =λ
4πL∆Φ ≈ ∆LX −∆LY
L(2.17)
The actual quantity measured by the photo-detector will depend on the pre-
cise configuration of the experiment. However for our purposes, we will as-
sume that the detector outputs a time series data h(t) which is the observed
strain at any point in time.
In order to calculate the gravitational-wave strain h incident to the plane
of the interferometer, one must calculate the set of geometric transformation
rules which transform the + and × polarisations of the radiation frame to the

28 CHAPTER 2. GRAVITATIONAL WAVES
frame of the interferometer. This has been previously worked out in great
detail (e.g. [121]). The gravitational strain observed in the detector will have
the form,
h(t) = F+(θ, ϕ, ψ)h+(t) + F×(θ, ϕ, ψ)h×(t) (2.18)
where the detector antenna response functions F+ and F× are functions of
(θ, ϕ, ψ); these can be found in [121].
2.2.1 Noises in interferometer
Like all instruments, the laser interferometer will have sources of noise and
these will corrupt the measured strain h. The main sources of noise are:
Seismic noise This occurs at the low frequency end, mostly at less than
40 Hz. Seismic vibrations due to passing vehicles and disturbances in
the Earth will induce vibrations in the suspended mirrors. Improve-
ments in test mass isolation systems aim to reduce this noise level below
10 Hz for Advanced LIGO/Virgo.
Thermal noise Thermal vibration of the mirrors and the suspension sys-
tem can alter the length L. This occurs around the ∼40-200 Hz band.
Improvements such as monolithic suspension wires and better optical
coatings are leading to increased sensitivity in this bandwidth.
Shot noise This source of noise arises from the quantum nature of the laser
light itself. Since the photo-detector is a photon counter, there is a
Poisson process, with error√N where N is the number of photons per
unit time. To increase the sensitivity, the laser power can be increased.
However simply increasing the power can lead to effects that can in-
crease the noise, such as increased thermal noise of the mirrors. One
way experimentalists plan to decrease the shot noise with increasing
the power of the laser is to use a power recycling mirror located at
the symmetric port. This reflects light back into the cavity, thereby
increasing the power.

2.2. DETECTION OF GRAVITATIONAL WAVES 29
These sources of noise are essentially stationary Gaussian processes. This
property can be characterised by use of a (one-sided) power spectral density
Sn(f) (PSD) defined by,
〈n(f)n(f ′)〉 ≡ 12Sn(|f |)δ(f − f ′) (2.19)
where the angled brackets 〈.〉 denote the ensemble average and δ(f − f ′) is
the Dirac delta function, with the property∫ ∞−∞
δ(f) df = 1. (2.20)
Since the above quantity is unit-less, δ(f − f ′) must have units of time. The
Fourier transform of n(t) has units of strain times time:
n(f) =
∫ ∞−∞
n(t)e−2πiftdt. (2.21)
Hence the (one-sided) noise PSD must have units of strain squared by time
(or time, since strain is unit-less). Generally the noise in the detector is
measured as an amplitude spectral density (ASD). This is simply the square
root of the PSD, hence it has units of root time. The common unit of
measuring ASDs is Hz−1/2. Figure 2.3 shows the measured ASDs for the
previous LIGO science runs, and the design sensitivity goal.

30 CHAPTER 2. GRAVITATIONAL WAVES
Figure 2.3: The best strain sensitivities (ASDs) of previous LIGO scienceruns are shown here. The curve can be broken down into roughly three majorsources of noise. The seismic “wall” below 40 Hz, the suspension thermalnoise between 40 and 200 Hz and the photon shot noise above 200 Hz. Thedetectors are most sensitive to sources with gravitational wave frequenciesaround 100 Hz. Credit: [45]
2.3 Inspiral gravitational waves
In this section the gravitational waveform produced during the inspiral phase
of compact binary coalescence will be derived. The section closely follows
the derivation of the inspiral waveform from [1].
The leading-order magnitude of gravitational radiation observed at a time
t and distance D from the source is given by the quadrupole formula (i.e.

2.3. INSPIRAL GRAVITATIONAL WAVES 31
Equation 36.45a of [3]),
hTTjk (t,x) =
2G
c4D
d2ITTjk (t−D/c)dt2
(2.22)
where ITT is the transverse traceless part of the second moment of mass
distribution I:
Ijk =
∫ρ(x)xjxk d
3x. (2.23)
2.3.1 Geometry of binary system
Consider a binary system with masses m1 and m2, total mass M = m1 +
m2, separated by a distance a in a circular orbit. If a 2GM/c2, then
Newtonian gravity can be used to give a description of the binary dynamics.
For simplicity, let us assume that the bodies behave as point mass objects
with no spin. To describe this system, let us define a Cartesian coordinate
system (x, y, z) where the centre of mass of the system is at the origin, and
the bodies rotate anti-clockwise (as seen from the positive z-axis) in the x-y
plane. The orbital phase φorb(t) is defined as the angle between m1 and the
positive x-axis. See Figure 2.4 for reference. The locations of the masses m1
and m2 at some time t are
(x1, y1, z1) =
(µ
m1
a cosφorb(t),µ
m1
a sinφorb(t)), 0
)(2.24a)
(x2, y2, z2) =
(− µ
m2
a cosφorb(t), − µ
m2
a sinφorb(t), 0
)(2.24b)
respectively. For convenience we have introduced the reduced mass
µ =m1m2
M. (2.25)

32 CHAPTER 2. GRAVITATIONAL WAVES
xy
z
m1
m2
a
ΦHtL
Figure 2.4: Coordinate system of binary system (x, y, z). The two bodies,m1 and m2 orbit about the centre of mass, which is chosen as the origin ofthe coordinate system. At some time t the phase φorb(t) describes the anglebetween m1 and the x axis. In this example, the masses are approximatelyequal, with a separation a.
The mass distribution of the binary is therefore
ρ(x) = m1
[δ
(x− µ
m1
a cosφorb(t)
)δ
(y − µ
m1
a sinφorb(t)
)δ(z)
]+m2
[δ
(x+
µ
m2
a cosφorb(t)
)δ
(y +
µ
m2
a sinφorb(t)
)δ(z)
]. (2.26)
Substituting the mass distribution (2.26) and the location of the bodies (2.24)
into the quadrupole moment equation (2.23), we find the non-zero compo-

2.3. INSPIRAL GRAVITATIONAL WAVES 33
nents of Ijk are Ixx, Ixy = Iyx and Iyy. Using the identity∫δ(x− x0)g(x) dx = g(x0), (2.27)
Ixx can be evaluated as
Ixx =
∫ (m1
[δ
(x− µ
m1
a cosφorb(t)
)δ
(y − µ
m1
a sinφorb(t)
)δ(z)
]+m2
[δ
(x+
µ
m2
a cosφorb(t)
)δ
(y +
µ
m2
a sinφorb(t)
)δ(z)
])x2 dx3
= m1
(µ
m1
a cosφorb(t)
)2
+m2
(µ
m2
a cosφorb(t)
)2
=
[m1
(µ
m1
)2
+m2
(µ
m2
)2]a2 cos2 φorb(t)
= µa2 cos2 φorb(t)
=1
2µa2 (1 + cos 2φorb(t)) (2.28)
Similarly, we can find Iyy and Ixy:
Iyy =1
2µa2 (1− cos 2φorb(t)) Ixy =
1
2µa2 sin 2φorb(t). (2.29)
The second derivatives with respect to time can then be easily worked
out:
Ixx = −Iyy = −2µa2Ω2(t) cos 2φorb(t) (2.30a)
Ixy = Iyx = −2µa2Ω2(t) sin 2φorb(t) (2.30b)
where we have introduced the orbital angular frequency Ω(t), which is the
first time derivative of the orbital phase. At this point, we assume that the
second time derivative of the orbital phase is negligible, i.e Ω(t) Ω2(t)

34 CHAPTER 2. GRAVITATIONAL WAVES
2.3.2 Orientation of the binary relative to an observer
Before we can insert the second derivatives of the moment into the quadrupole
formula (2.22) for hTTjk (t,x), we need to describe Iij as it would be seen along
a particular direction. Let us then choose a spherical polar coordinate system
(D, ι, φ) which has the centre of mass of the binary at the origin, and the
observer at the coordinates (D, ι, φ) — see 2.5. Here ι is the angle between
the line of sight N and the vector that is perpendicular to the plane of the
binary, i.e the angular momentum direction, L:
N · L = cos ι. (2.31)
For example, if ι = 0 the binary system is orientated “head-on” relative to
the observer, and if ι = ±π/2 the binary is “edge-on”. The orientation of
the x axis to the observer is completely arbitrary within the orbital plane.
For simplicity of transforming Ijk to the line of sight, let us fix the x axis
such that the line of sight lies along the z-x plane (see Figure 2.5).
The unit vectors ( eι, eφ) relate to the Cartesian unit vectors ( ex, ey, ez)
by
eι = cos ι cosφ ex + cos ι sinφ ey − sin ι ez, (2.32a)
eφc = − sinφ ex + cosφ ey. (2.32b)
To transform the second derivative of the quadrupole moment Iij from
Cartesian coordinates to spherical polar coordinates, we use the standard
transformation rule
A′ij =∂xk∂x′i
∂xl∂x′j
Akl. (2.33)
The partial derivatives can be worked out by using
e′i =∂xj∂x′i
ej (2.34)

2.3. INSPIRAL GRAVITATIONAL WAVES 35
xy
z
m1
m2
a
ΦHtL
Ι
eΙ
eΦ
N
Figure 2.5: Coordinate system of binary system (x, y, z) with respect to anobserver at (D, ι, 0). Here we have fixed the x axis such that the line of sightto the observer lies in the x-z plane (yellow plane).
and (2.32), yielding
∂x
∂ι= cos ι cosφ = cos ι
∂y
∂ι= cos ι sinφ = 0 (2.35)
∂x
∂φ= − sinφ = 0
∂y
∂φ= cosφ = 1, (2.36)
where we have explicitly chosen the z-x plane to be perpendicular to the
observer (i.e. φ = 0). This greatly simplifies the calculation of the moments

36 CHAPTER 2. GRAVITATIONAL WAVES
Iij, resulting in
Iιι =
(∂x
∂ι
)2
Ixx +
(∂y
∂ι
)2
Iyy + 2
(∂x
∂ι
∂y
∂ι
)Ixy
= −2µa2Ω(t)2 cos2 ι cos 2φorb(t), (2.37)
Iφφ =
(∂x
∂φ
)2
Ixx +
(∂y
∂φ
)2
Iyy + 2
(∂x
∂φ
∂y
∂φ
)Ixy
= 2µa2Ω(t)2 cos 2φorb(t). (2.38)
and
Iιφ = Iφι =
(∂x
∂ι
∂x
∂φ
)Ixx +
(∂y
∂ι
∂y
∂φ
)Iyy +
(∂x
∂ι
∂y
∂φ+∂x
∂φ
∂y
∂ι
)Ixy
= −2µa2Ω(t)2 cos ι sin 2φorb(t). (2.39)
Since the components of Iij derived are already transverse, we simply
need to remove the trace to get ITTij :
ITTιι = −ITT
φφ = Iιι −1
2
(Iιι + Iφφ
)=
1
2
(Iιι − Iφφ
)= −µa2Ω(t)2(1 + cos2 ι) cos 2φorb(t), (2.40)
ITTιφ = ITT
φι = −2µa2Ω(t)2 cos ι sin 2φorb(t). (2.41)
Substituting these results into the quadrupole formula (2.22) to gives us the
two independent polarisations :
hTTιι = h+(t) = −4Gµa2Ω(t)2
c4D
(1 + cos2 ι
2
)cos 2φorb(t), (2.42a)
hTTιφ = h×(t) = −4Gµa2Ω(t)2
c4D(cos ι) sin 2φorb(t). (2.42b)

2.3. INSPIRAL GRAVITATIONAL WAVES 37
2.3.3 Orbital frequency as a function of time
Although the binary system is evolving through a series of quasi-stationary
circular orbits with orbital energy
E = −1
2
GµM
a, (2.43)
there is a loss of energy due to gravitational waves caused by the quadrupole
moment:
dE
dt= − G
5c5〈...I TT
ij
...I TTij 〉 = −32G4
5c5
M3µ2
a5. (2.44)
Because of the energy leak, the orbital separation a will reduce at a rate
da
dt=dE
dt
(dE
da
)−1
= −64G3
5c5
µM2
a3. (2.45)
By integrating this rate, we can obtain the separation as a function of time:∫a3 da =
∫−64G3
5c5µM2dt
⇒ a(t) =
(256G3
5c5µM2
)1/4
(tc − t)1/4, (2.46)
where have integrated up to a “coalescence” time tc. In practise there is a lo-
cal minimum of the effective potential of the system. In the Schwarzschild po-
tential, the minimum distance for the innermost stable circular orbit (ISCO)
is the three times the Schwarzschild radius 2GM/c2. This is reached at a
time
(tc − t) =405
16η
(GM
c3
). (2.47)
We can relate the separation a to the orbital angular frequency Ω by using

38 CHAPTER 2. GRAVITATIONAL WAVES
Kepler’s third law,
a =3
√GM
Ω2. (2.48)
Hence the orbital angular frequency Ω as a function of time can be obtained
by inserting the expression for the separation a (2.46),
Ω(t) =(GM)1/2
8
((GM)3
5c5η
)−3/8
(tc − t)−3/8
=c3
8GM
(c3η
5GM
)−3/8
(tc − t)−3/8
=c3
8GM[Θ(t)]−3/8, (2.49)
where in the second equality we have introduced the symmetric mass ratio
η = µ/M . In the final step, we have introduced the convenient dimensionless
time parameter Θ,
Θ(t) =
(c3η
5GM
)(tc − t). (2.50)
The orbital phase of the waveform at some time t before coalescence is the
time integral of the orbital angular frequency:
φorb(t) =
∫Ω(t)dt (2.51)
= φorb,c −1
ηΘ(t)5/8 (2.52)
where φorb,c is the orbital phase at coalescence tc.
2.3.4 Higher order multipole corrections
We have derived the gravitational waveform assuming only the lowest or-
der multipole moment, the quadrupole moment. However in reality, there
are higher order multipolar moments that contribute to energy loss, as well
as relativistic corrections to the quadrupolar formula that can change the

2.3. INSPIRAL GRAVITATIONAL WAVES 39
phase evolution. Ultimately, the goal is to identify the general form of the
GW to be searched for in the detector strain data. Studies have shown that
the so called restricted post-Newtonian (PN) waveform is sufficient to use in
matched filtering (discussed in the next section) [9]. So far we have evalu-
ated the zero-th order “Newtonian” waveform. The restricted PN waveform
has the amplitude factor still with a Newtonian order, but includes higher
v/c corrections to the phase evolution. The orbital phase to second post-
Newtonian order, generally used in LIGO inspiral searches, has the orbital
phase
φorb(t) = φorb,c −1
η
[Θ(t)5/8 +
(3715
8064+
55
96η
)Θ(t)3/8 − 3π
4Θ(t)−1/4
+
(9275495
14450688+
284875
258048η +
1855
2048η2
)Θ(t)1/8
],
(2.53)
where Θ is defined in equation (2.50).

40 CHAPTER 2. GRAVITATIONAL WAVES
Figure 2.6: Schematic showing trajectories of two equal mass bodies in abinary system near coalescence. The black circle represents the boundaryof the innermost stable circular orbit (ISCO). Beyond this limit, the bodiesplunge toward each other. This will be the time at which we will terminatethe inspiral waveform. As the bodies inspiral, the separation gets smaller asa 1/4 power law in time, and the orbital angular frequency increases as a-3/8 power law (in the Newtonian limit).

2.4. INSPIRAL WAVEFORM 41
2.4 Inspiral gravitational waveform as seen in
the detector strain
In this section, we turn our attention to describing the inspiral gravitational
waveform as it will be observed in the strain of the detector.
Let us now define the GW + and × polarisations (2.42) in terms of the
“cosine” and “sine” components hc, hs which will be useful later. From
(2.42),
h+(t) =
(1 + cos2 ι
2
)A(t) cos 2φorb(t) (2.54a)
h×(t) = (cos ι)A(t) sin 2φorb(t), (2.54b)
where the amplitude factor A(t) is defined as,
A(t) = −4Gµ
c4Da2Ω2
= −4Gµ
c4D(GMΩ(t))2/3 substituting (2.48)
= −GMη
c2D
(c3η
5GM(tc − t)
)−1/4
substituting (2.49) and µ = Mη
=GMDc2
(tc − t
5GM/c3
)−1/4
. (2.55)
Here we have introduced the chirp mass M = Mη3/5. Let us also choose to
describe the phase of the gravitational waveform as
2φorb(t) = φ(t) + φc (2.56)
where we define the gravitational phase φ(t) (to second post-Newtonian order
as in (2.53)) to be
φ(t) = −2
η
[Θ(t)5/8 +
(3715
8064+
55
96η
)Θ(t)3/8 − 3π
4Θ(t)1/4
+
(9275495
14450688+
284875
258048η +
1855
2048η2
)Θ(t)1/8
].
(2.57)

42 CHAPTER 2. GRAVITATIONAL WAVES
and φc is the gravitational phase at time of coalescence, tc. The form (2.56)
enables the + and × polarisations of the waveform to be written as
h+(t) =
(1 + cos2 ι
2
)A(t) cos (φ(t) + φc) , (2.58)
h×(t) = (cos ι)A(t) sin (φ(t) + φc) . (2.59)
Substituting these into the strain measured at the detector (2.18) we get
h(t) = F+
(1 + cos2 ι
2
)A(t) cos (φ(t) + φc)
+F× (cos ι)A(t) sin (φ(t) + φc)
(2.60)
where for convenience we have dropped the parameters (θ, ϕ, ψ) from the an-
tenna pattern functions F+, F×. One can use the linear combination trigono-
metric identity
a cos θ + b sin θ =√a2 + b2 cos(θ − α) (2.61)
where tanα = b/a to re-express the strain (2.60) as
h(t) =D
Deff
A(t) cos(φ(t)− φ0) (2.62)
where the “effective distance” factor Deff obtained from the trigonometric
identity (2.61) is
Deff =D√
F 2+ (1 + cos2 ι)2 /4 + F 2
× (cos ι)2(2.63)
and φ0 is related to the antenna pattern functions F+, F× and coalescence
phase φc by
φ0 = arctan
(F× (2 cos ι)
F+ (1 + cos2 ι)
)− φc. (2.64)
The advantage of expressing the strain as (2.62) is that, by the trigonometric

2.4. INSPIRAL WAVEFORM 43
addition identity,
h(t) =D
Deff
[A(t) cosφ(t) cosφ0 + A(t) sinφ(t) sinφ0]
=(1 Mpc)
Deff
[A1 Mpc(t) cosφ(t) cosφ0 + A(t)1 Mpc sinφ(t) sinφ0]
=(1 Mpc)
Deff
[hc(t) cosφ0 + hs(t) sinφ0] , (2.65)
where in the second equality we have explicitly set D in the numerator and
D in the amplitude function A(t) to be 1 Mpc. This allows us to define the
cosine and sine components of the waveform as
hc(t) = A1 Mpc(t) cosφ(t), (2.66)
hs(t) = A1 Mpc(t) sinφ(t). (2.67)
2.4.1 Intrinsic and extrinsic parameters
We see that the inspiral signal h(t) given by (2.65) will take its form from
nine different parameters ϑµ, shown in table 2.1. Most of the parameters
Table 2.1: Table of intrinsic and extrinsic inspiral parameters
Parameter ϑµ Symbol Unit Unit of measurecomponent mass 1 m1 mass Mcomponent mass 2 m1 mass Mtime of coalescence tc time sphase at coalescence φc angle radiansdistance to source D length Mpcinclination ι angle radianssky coordinates (θ, ϕ) angle radianspolarisation angle ψ angle radians
depend on the orientation of the binary with respect to the observer, and
can be combined into the effective distance amplitude Deff given by (2.63).
Of the remaining parameters, tc can searched for explicitly in time, shown
in Section 2.5.4. The unknown phase term φ0 can also be maximised over
using the procedure outlined in Section 2.5.5.

44 CHAPTER 2. GRAVITATIONAL WAVES
The only remaining parameters are the intrinsic parameters, the compo-
nent masses m1 and m2, which must be explicitly searched for, as explained
in Section 2.5.3.
2.5 Signal processing
The goal of a GW data analyst is to determine whether a GW signal is
present in the GW detector strain data at some time. For those looking
for inspiral signals, this usually means determining when an inspiral signal
(with any number of parameters) just finished. In this respect the time of
coalescence tc, is searched for explicitly. As discussed in the previous section,
the inspiral gravitational waveform as a function of time is well known (for
given intrinsic parameters) and can be scaled by effective distance, given by
(2.63). In order to detect whether an inspiral waveform just finished in the
detector strain data, one must construct a filter K that is cross-correlated
(in time) with the detector data.
2.5.1 Matched Filter
It has long been known [122] that the best way to search for a known signal
in stationary Gaussian noise is to use a matched filter . This is not the name
of a class of filter, such as a FIR or IIR or the specific name of a type of filter
such as Chebyshev or Butterworth, but rather a theoretical framework. In
this section we will derive the form of optimal filter K that will maximise
the signal searched for with respect to the background noise (signal to noise
ratio, SNR). From Section 2.2.1 we know that the input signal (in our case
strain) s, contains stationary Gaussian noise n(t) and possibly a signal h(t)
with a set of parameters ϑµ.
s(t) =
n(t) if signal is absent
n(t) + h(t) if signal is present.(2.68)

2.5. SIGNAL PROCESSING 45
The input to the optimal filter will be s(t) = h(t) + n(t) and the output
will be something that scales with SNR. We want to find the filter K, that
produces the filtered output z:
z =
∫ ∞−∞
s(t)K∗(t) dt =
∫ ∞−∞
s(f)K∗(f) df.
=
∫ ∞−∞
h(f)K∗(f) df +
∫ ∞−∞
n(f)K∗(f) df
= H +N. (2.69)
This is a cross-correlation of the filter K(t) and the input s(t). The first
term H is well-defined, but the second term is a random process. Using the
properties of the noise given in Section 2.2.1, the ensemble average N2 is
found to be
〈N2〉 =
∫ ∞−∞
∫ ∞−∞
K∗(f)K∗(f ′)〈n(f)n(f ′)〉 dfdf ′
=
∫ ∞−∞
∫ ∞−∞
K∗(f)K∗(f ′)12Sn(|f |)δ(f − f ′) dfdf ′
=1
2
∫ ∞−∞|K(f)|2Sn(|f |) df. (2.70)
We are looking for the filter K that maximises the ratio of H2 to 〈N2〉, i.e.
ξ =H2
〈N2〉 =2∣∣∣∫∞−∞ h(f)K∗(f)e2πift df
∣∣∣2∫∞−∞ |K(f)|2Sn(|f |) df
=2∣∣∣∫∞−∞ [h(f)/
√Sn(f |)
] [K∗(f)
√Sn(f |)
]df∣∣∣2∫∞
−∞ |K(f)|2Sn(|f |) df. (2.71)
The Cauchy-Schwarz inequality tells us that for two functions A(f) and B(f),∣∣∣∣∫ ∞−∞
A(f)B(f)df
∣∣∣∣2 ≤ ∫ ∞−∞|A(f)df |2
∫ ∞−∞|B(f)df |2 (2.72)

46 CHAPTER 2. GRAVITATIONAL WAVES
if and only if A and B are linearly dependent, i.e.
A(f) = C ·B(f) (2.73)
where C is a constant (see proof in [122]). By setting A(f) = K∗(f)√Sn(f)
and B(f) = h(f)/√Sn(f), the numerator in (2.71) is maximised, yielding
ξ =
2C
[∫∞−∞
∣∣∣h(f)∣∣∣2 /Sn(f) df
] [∫∞−∞
∣∣∣K(f)∣∣∣2 Sn(f) df
]∫∞−∞ |K(f)|2Sn(|f |) df
(2.74)
= 2C
∫ ∞−∞
∣∣∣h(f)∣∣∣2
Sn(f)df. (2.75)
Inserting the chosen A and B into (2.73) gives,
K∗(f)√Sn(f) = h∗(f)/
√Sn(f) (2.76)
→ K∗(f) = 2h∗(f)
Sn(f), (2.77)
where we have set the arbitrary constant C = 1. Hence the optimal filter
scales with,
z ≡ 2
∫ ∞−∞
s(f)h∗(f)
Sn(|f |) df. (2.78)
2.5.2 Inner product
The definition of the optimal filter (2.78) naturally leads us to the idea of an
inner product 〈· |·〉. Let us define the inner product of two real vectors s and
h to be
〈s |h〉 ≡ 2
∫ ∞−∞
s(f)h∗(f)
Sn(|f |) df. (2.79)

2.5. SIGNAL PROCESSING 47
This definition can be applied to any two real vectors, i.e. two waveforms
with slightly different intrinsic parameters, h and h′:
〈h |h′ 〉 = 2
∫ ∞−∞
h(f)h′∗(f)
Sn(|f |) df. (2.80)
These can be normalised such that
~h =h√〈h |h〉
, (2.81)
leading to the definition of the normalised inner product,
⟨~h∣∣∣~h′⟩ =
⟨h√〈h |h〉
∣∣∣∣∣ h′√〈h′ |h′ 〉
⟩=
〈h |h′ 〉√〈h |h〉
√〈h′ |h′ 〉
. (2.82)
2.5.3 Template bank
Clearly the matched filter can only search for a single “template” — a wave-
form with a specific set of parameters. As we have already discussed, the
extrinsic parameters D, ι, ψ, θ, ϕ simply scale the waveform in the effective
distance Deff . In order to find a waveform with any distribution of intrinsic
parameters ϑµ using the matched filter, we must first define the continuous
manifold on which all waveforms reside. The geometry of this parameter
space manifold will allow us to find the minimum spacing between templates
such that for any waveform with unknown intrinsic parameters, at least one
matched filtered template will produce a high SNR.
In this section, we will only present a short derivation on template bank
construction. For a full discussion on template bank construction, see [123]
(for example).
Using the normalised inner product (2.82), we define the “match” M
between two normalised waveforms ~h(ϑµ) and ~h(ϑν) as
M = max⟨~h(ϑµ)
∣∣∣~h(ϑν)⟩
(2.83)
≈ 1 +1
2
(∂2M
∂∆ϑµ∂∆ϑν
)∆ϑα=0
∆ϑµ∆ϑν . (2.84)

48 CHAPTER 2. GRAVITATIONAL WAVES
The concept of a match leads to the idea of a “mismatch” MM,
MM = 1−M ≡ γµνdϑµdϑν (2.85)
where the metric γµν defines the differential geometry of the intrinsic param-
eter space. Each point on this space corresponds to intrinsic parameter ϑµ.
The distance between two points on the manifold can be found using the met-
ric, which will tell us the mismatch. From this metric (or rather a coordinate
transformation of it), a discrete “template bank” can be constructed.
2.5.4 Matched filter as a function of unknown time of
coalescence
The chosen filter K (2.77) depends on the unknown time of coalescence tc.
This parameter can be “pulled” out via the following rearrangement of h(f),
h(f) =
∫h(t)e−2πift dt
=
[∫h(t)e−2πif(t+tc) dt
]e2πiftc
let t = t′ − tc, dt = dt′
=
[∫h(t′ − tc)e−2πift′ dt′
]e2πiftc
= F [h(t− tc)] · e2πiftc (2.86)
From now on we explicitly use h(f) to represent the Fourier transform of
h(t − tc) (which does not explicitly depend on tc). This way, the unknown
time of coalescence tc can now be searched over by changing the value of tc
in the matched filter,
z(tc) = 2
∫ ∞−∞
s(f)h∗(f)
Sn(|f |) e2πiftc df. (2.87)

2.5. SIGNAL PROCESSING 49
By introducing
x(f) =s(f)
Sn(|f |) (2.88)
where x represents the “over-whitened” detector output s(t), weighted by the
inverse noise power spectral density Sn(f), we can use the cross-correlation
theorem to define the matched filter (2.87) in the time domain:
z(tc) =
∫ ∞−∞
x(f)h∗(f)e2πiftc df = 2
∫ tc
−∞x(t)h(t− tc) dt, (2.89)
recalling that we have now defined h(t) to explicitly have tc = 0.
2.5.5 Matched filter of unknown phase
The unknown phase constant φ0 can be maximised over by filtering both
components hc and hs (which correspond to orthogonal phases φ0 = 0 and
φ0 = π/2) separately and then combining them to form a complex signal
z(tc) = 2
∫ ∞−∞
s(f)h∗c(f)
Sn(|f |) e2πiftcdf + i2
∫ ∞−∞
s(f)h∗s(f)
Sn(|f |) e2πiftcdf. (2.90)
The real part corresponds to the matched filter output for the (real) template
hc, and the imaginary part corresponds to the matched filter output for the
(real) template hs.
The cross-correlation theorem gives the complex time domain two-phase
matched filter (2.90):
z(t) = 2
∫ t
−∞x(t′)hc(t
′ − t)dt′ + i2
∫ t
−∞x(t′)hs(t
′ − t)dt′ (2.91)
= 2
∫ t
−∞x(t′)h(t′ − t)dt′ (2.92)
where, for simplicity of later equations, we define
h(t) = hc(t) + ihs(t) = A1 Mpc(t)eiφ(t) (2.93)

50 CHAPTER 2. GRAVITATIONAL WAVES
(recalling again that amplitude A(t) and phase φ(t) implicitly have tc = 0).
2.5.6 Signal to noise ratio
Since the matched filter output z maximises the signal to noise ratio, we
could simply use this as detection statistic by declaring detection if it has a
value above some threshold. However first we normalise by the variance σ2
of the real part of the real filter:
σ2 = VAR (〈n |hc 〉)⟨(2
∫ ∞−∞
n(f)h∗c(f)
Sn(f)df + 〈2
∫ ∞−∞
n(f)h∗c(f)
Sn(f)df〉)2⟩
= 〈(
2
∫ ∞−∞
n(f)h∗c(f)
Sn(f)df + 2
∫ ∞−∞〈 n(f)√
Sn(f)〉 h∗c(f)√
Sn(f)df
)2
〉
= 〈(
2
∫ ∞−∞
n(f)h∗c(f)
Sn(f)df
)2
〉
= 2
∫ ∞−∞
hc(f)h∗c(f)
Sn(f)〈 n(f)n∗(f)
Sn(f)〉df
= 2
∫ ∞−∞
hc(f)h∗c(f)
Sn(f)df
= 〈hc |hc 〉 = 2
∫ ∞−∞
∣∣∣hc(f)∣∣∣2
Sn(|f |) df. (2.94)
We could define the SNR as,
SNR(t) =z(t)
σ. (2.95)
However this clearly means SNR could be complex, which does not really
make sense. Following convention (c.f. [124]), let us define the amplitude
SNR, ρ, as the absolute value of the two-phase matched filter z divided by

2.5. SIGNAL PROCESSING 51
the standard deviation of its real part,
ρ(t) =|z(t)|σ
. (2.96)
By normalising the matched filter like this, in the absence of a GW, the SNR
squared ρ2 is Chi-square distributed with two degrees of freedom (one for
each real and imaginary component). Hence the probability of finding an
SNR value greater than ρ∗ in the absence of a waveform is [125]
P (ρ2 > ρ2∗) = e−ρ
2∗/2. (2.97)
Conversely, in the presence of an inspiral waveform (3.12) the expected ρ2 is
〈ρ2〉 =〈|z|2〉σ2
=
(1 Mpc
Deff
)2
σ2. (2.98)
Hence the amplitude SNR ρ forms a very useful detection statistic, as values
well above unity are unlikely to caused by Gaussian noise alone. The relation
(2.98) can also determine the effective distance Deff for a recovered amplitude
SNR ρ.
2.5.7 Discrete time domain filtering
In practise the detector data s(t) is discretely sampled at intervals of ∆t
with a sampling rate of fs ≡ 1/∆t. The discretisation of the continuous time
domain matched filter (2.92) is
zk = 2k∑
j=−∞xjhj−k∆t (2.99)
where the index k denotes discretely sampled times of t, namely tk = k∆t. In
practise, the inspiral waveform template hi is bounded in both the time and
frequency domains because the detector is only sensitive over a finite band-
width, fmin–fmax. Hence the discretisation of the matched filter conforms to

52 CHAPTER 2. GRAVITATIONAL WAVES
the standard form of a finite impulse response (FIR) filter,
yn =M∑k=0
bkxn−k (2.100)
where standard signal processing terminology denotes the feed-forward coef-
ficients bk, which in our example relate the time domain template hj. The
term impulse response comes from the filter’s output (response) when there
is only one non-zero unity input sample (impulse). In this case, M samples
after the unit impulse the output is zero. Hence the term finite impulse
response.
The approximate duration of the template in the time domain can be
worked out by inverting the orbital frequency (2.49) and noting that the inspi-
ral gravitational frequency, f , is twice the orbital frequency (f = 2(Ω/2π) =
Ω/π); thus
tc − tf =5GM
ηc3
(8GMπf
c3
)−8/3
(2.101)
where tf is the time when the template has a gravitational frequency f .
As discussed in Section 2.3.3, we define the end of the inspiral waveform
to be the time of ISCO. Substituting the time of ISCO (2.47) into the above
equation, we can see that for a typical NS-NS system (where the total mass
is less than 10M), the time between coalescence and ISCO is negligible
(< 1 second). Hence the actual duration T of the waveform will depend on
the lower frequency boundary of the detector’s sensitive bandwidth, which
is primarily dependent on seismic noise (see 2.2.1). For LIGO’s fifth science
run, this was around 40 Hz. For Advanced LIGO, this is expected to go down
to 10-15 Hz. Although one could place a coefficient bj for every sample hj,
a more efficient method would be to place coefficients at each quarter wave
cycle Ncyc (for example). Hence M could be proportional to the number of
cycles rather than the template duration. Table 2.2 shows the duration T
and number of cycles Ncyc of a canonical 1.4-1.4 M NS-NS template as a
function of fmin.

2.5. SIGNAL PROCESSING 53
Table 2.2: Table of approximate template durations T and number of cyclesNcyc of a 1.4-1.4M template based on starting frequency fmin
fmin Duration T (seconds) Number of cycles Ncyc
40 2.5× 101 1.6× 103
15 3.4× 102 8.2× 104
10 1.0× 103 1.6× 104
3 2.5× 104 1.2× 105
2.5.8 Infinite Impulse Response Filter
Infinite impulse response (IIR) filters differ from FIR filters in that the filter
output depends on previous filter inputs (feed-forward) as well as previous
filter outputs (feed-back). The name infinite comes from their characteris-
tic of having a non-zero response any time after an impulse. The generic
difference equation of an IIR filter is,
yn =N∑k=1
akyn−k +M∑k=0
bkxn−k. (2.102)
Hence IIR filters have two sets of coefficients, ak’s (feed-back coefficients)
and bk’s (feed-forward coefficients).
Analogs of the coefficients are capacitance, resistance, inductance (if the
system is electrical) or mass, coefficient of damping, and coefficient of re-
silience (if the system is mechanical), or thermal capacitance, thermal con-
ductance (if the system is thermal).
IIR filter design
When designing FIR filters, the coefficients are generally chosen by first find-
ing the desired frequency response and then simply using the inverse Fourier
transform to find the time domain coefficients. For IIR filters, choosing co-
efficients ak and bk is not as easy. In fact it is well known that there is no
direct method for designing IIR filter coefficients. However standard IIR fil-
ter design falls into three classes; impulse invariance, bi-linear transform, and
optimisation methods, all of which use the z-transform. The z transform of

54 CHAPTER 2. GRAVITATIONAL WAVES
(2.102) is
Y (z) = Y (z)N∑k=1
akz−k +X(z)
M∑k=0
bkz−k (2.103)
which leads to the transfer function
H(z) =Y (z)
X(z)=
∑Mk=0 bkz
−k
1 +∑N
k=1 akz−k. (2.104)
One key aspect of IIR filter design is stability. A system is defined as
stable if, given any bounded input, the output will always be bounded. This
condition is satisfied when all poles of the transfer function (2.104) lie within
the unit circle.
There are many different types of forms for IIR filters. Examples include
Direct Form I and II, modified Direct Form I and transposed Direct Form
II. All different forms return the same output, but are constructed in such
a way as to optimise performance (i.e. minimise memory requirements, or
maximise computational efficiency).
A number of IIR filters can also be used in combination to give a single
output. In this way, IIR filters can either be cascaded (one filter’s output is
the next filter’s input), or operate in a parallel configuration (e.g several filters
take the same input, and then add their outputs to give a single output). The
low-latency inspiral search pipeline introduced in the next chapter is based
on the latter, parallel IIR filters. The transfer response function of parallel
IIR filters is the addition of each IIR filter’s transfer response function. As
will be seen in the next chapter, a summation of IIR filters can approximate
the transfer response of an inspiral waveform.
2.6 Summary
In this chapter we have provided all the physical and mathematical concepts
necessary to design a search method for GWs from the inspiral phase of a
CBC source. In Section 2.1 we have shown how a small perturbation to an

2.6. SUMMARY 55
otherwise flat space can allow for plane wave solutions to the Einstein field
equations. A description of how this perturbation causes a differential frac-
tional change in arm length of large-scale Michelson interferometers was given
in Section 2.2. With some calibration, the induced strain can be measured as
a fluctuation of photons at the asymmetric port of the interferometer. The
strain from a true GW is subject to many noise sources all corrupting the
purity of any GW signal. The gravitational waveform produced by the inspi-
ral phase of a CBC is given in detail in Section 2.3. The way an inspiral GW
manifests in the strain data signal of ground-based GW detectors was shown
Section 2.3. Due the noise level of the signal, the concept of calculating a
signal to noise ratio (SNR) was introduced in Section 2.5, as well as other
signal processing techniques which will enable the detector strain data to be
analysed.
We now have all the fundamental knowledge of inspiral gravitational
waves and signal processing techniques with which to design a new inspi-
ral search pipeline.

56 CHAPTER 2. GRAVITATIONAL WAVES

Chapter 3
Low-Latency Gravitational
Wave Detection Method
In this chapter, a new time-domain low-latency pipeline will be presented.
Our method aims to achieve low latency by filtering the over-whitened strain
x in the time domain using a bank of parallel IIR filters. The idea of using
IIR filters to search for inspiral GW signals in detector data was first explored
in [126]. However our method is independent of theirs, as ours depends on
a bank of fixed single pole IIR filters, and theirs depends on adaptive line
enhancer filters.
The remainder of this chapter consists of an article we published in Phys-
ical Review D [119]. Sections 3.0 to 3.6 is our paper verbatim.
3.0 Paper abstract
With the upgrade of current gravitational wave detectors, the first detection
of gravitational wave signals is expected to occur in the next decade. Low-
latency gravitational wave triggers will be necessary to make fast follow-up
electromagnetic observations of events related to their source, e.g., prompt
optical emission associated with short gamma-ray bursts. In this paper we
present a new time-domain low-latency algorithm for identifying the presence
of gravitational waves produced by compact binary coalescence events in
57

58 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
noisy detector data. Our method calculates the signal to noise ratio from
the summation of a bank of parallel infinite impulse response (IIR) filters.
We show that our summed parallel infinite impulse response (SPIIR) method
can retrieve the signal to noise ratio to greater than 99% of that produced
from the optimal matched filter.
3.1 Introduction
The interferometric gravitational wave (GW) detectors LIGO [35], and Virgo
[37] have reached a sensitivity at which the detection of GWs is possible.
The LIGO detectors are currently undergoing a major upgrade to Advanced
LIGO, for which the sensitivity will be improved ten fold relative to Initial
LIGO [48]. Hence in the era of advanced detectors GWs produced from
inspiralling compact binaries will be detectable within a volume of space one
thousand times larger than that of initial LIGO, out to ∼200-300 Mpc [49].
The emission of GWs produced by compact binary coalescence (CBC)
can be modelled with a high degree accuracy [127]. When two compact
bodies, such as neutron stars or black holes are in orbit, Einstein’s equations
predict the generation of GWs. As the bodies spiral towards each other a
GW is created that increases in frequency over time until the bodies merge,
following what is known as the inspiral waveform. Ground based detectors
have frequency passbands that allow them to be sensitive to the final stages
of such events up to total system masses of several hundred M.
Neutron star binary mergers are widely thought to be the progenitors of
short hard gamma-ray bursts (short GRBs) [63, 128]. The delay between
the final GW emission and the onset of the GRB is estimated to be as
short as 0.1 seconds or as long as tens to hundreds of seconds [82, 83]. The
electromagnetic emission of the GRB event is not well understood. Related
to the initial GRB there is thought to be a prompt emission in X-ray and
optical wavelengths followed by a delayed afterglow of cascading wavelengths.
Prompt optical emission may occur tens to hundreds of seconds after the
initial burst. The low-latency detection of the GW associated with a neutron
star merger could lead to the localization of a GRB source event on the

3.1. INTRODUCTION 59
sky, enabling fast moving telescopes to observe the prompt optical emission.
Data collected from a multitude of sources — GWs, gamma-rays, X-rays and
optical counterparts of the GRB — will lead to maximum insight into these
highly energetic events.
The standard strategy for searching for the existence of inspiral wave-
forms in the detector data is based on matched filtering [127] (and references
therein). This method, based on Wiener optimal filtering, is a correlation
of an expected inspiral waveform template and the detector data, weighted
by the inverse noise spectral density of the detector [122]. In order to save
computational costs, this correlation is performed in the frequency domain,
via a Fourier transform of a finite segment of detector data. In previous
LIGO searches, the detector data is split up into “science blocks”, which are
further divided into “data segments” chosen to be at least twice the length
of the longest waveform in the template bank [129]. Each data segment is
chosen to overlap the previous one by 50%. Each segment therefore must be
matched filtered in a time that is half the length of the segment for a real-
time analysis; that is, the filter output rate is equal to the data input rate.
In this case, the matched filter process has a minimum latency (from signal
arrival to signal detection) that is proportional to the longest template (see
[4] for more details). Advanced LIGO will have an increased bandwidth over
Initial LIGO, with the lower bound dropping from 40 Hz to 10 Hz [49]. GW
signals from CBC events spend much more time at these lower frequencies.
Hence waveforms used for matched filtering in Advanced LIGO will be much
longer (thousands of seconds). This in turn means the segment length will
be increased, further increasing the latency. The latency of this method to
produce GW triggers is longer than the time to onset of prompt optical emis-
sion after coalescence (10s to 100s of seconds). After this amount of time,
the early electromagnetic counterpart of a GRB event will be significantly
faded, and may be missed by telescopes altogether.
A low-latency GW detection method is required to trigger follow-up elec-
tromagnetic observations of the prompt optical emission. So far two fre-
quency domain methods have been developed to solve this issue. The VIRGO
group has produced a low-latency pipeline based on Multi-Band Template

60 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
Analysis (MBTA) [116], and LIGO is also working on a new method, Low-
Latency On-line Inspiral Data analysis (LLOID) method. In MBTA the
matched filtering technique is split over two frequency bands, and the out-
put is coherently added, reducing latency. A latency of less than 3 minutes
until the availability of a trigger using this method has been achieved [116].
Low-latency in the LLOID method is achieved by first down-sampling the
incoming data into multiple streams and then applying frequency domain
finite impulse response (FIR) filters [130]. The computational cost of this
pipeline is reduced by decreasing the number of templates via singular value
decomposition [118].
We introduce a new method to detect CBC signals in the time domain
using infinite impulse response (IIR) filters. Approximating an inspiral wave-
form by a summation of time shifted exponentially increasing sinusoids en-
ables us to construct a bank of parallel single-pole IIR filters. Each IIR filter
acts as a narrow bandpass filter. When each appropriately delayed IIR fil-
ter is added the coherent output approximates the matched filter output of
the exact waveforms. We call this the summed parallel infinite impulse re-
sponse (SPIIR) method. Figure 3.1 visually demonstrates the idea of using
a bank of IIR filters as narrow bandpass filters. For a full explanation of the
mathematical principles, see [4].
In this follow up paper, we numerically address the issues essential to
the practical use of this method for the upcoming advanced detectors. We
calculate the filter coefficients and demonstrate via numerical simulations
how well our method approximates the optimal matched filter as a function
of the number of filters per bank using a range of parameters. We also show
that the detection rate of the SPIIR method is very similar to that of the
matched filter method. It has been shown theoretically that in order to get
the same latency as the SPIIR method, the frequency domain matched filter
method would require greater computational resources [4].
The structure of this paper is as follows: In section 3.2 we will go through
the formal introduction of the inspiral waveform and matched filtering, and
how to get from the continuous frequency domain matched filter to the time
domain discrete matched filter. This will lead to a demonstration on how

3.2. METHODOLOGY 61
f1
d1
f2
d2
f3
d3
fn
dn
Input Output+
Figure 3.1: A schematic overview of the SPIIR method. The input is splitinto different channels, time delayed by an amount d, then passed through anarrow bandpass IIR filters, each with a different central frequency f . Finallythe output of each individual IIR filter is summed, giving the output of theSPIIR method.
it is possible to approximate an inspiral signal by a sum of exponentially
increasing sinusoids. The methodology is explained in Section 3.3 and will
cover how we set up our simulation to test the efficiency of the SPIIR method
as opposed to the frequency domain matched filter. Section 3.4 will analyze
the results of the simulation and Section 3.5 will discuss the implications of
these results for advanced detectors.
3.2 Methodology
Gravitational wave interferometers output the strain induced by gravitational
waves incident on the detector, as well as inherent noise. In unitless strain,

62 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
the detector output will be
s(t) =
n(t) if signal is absent
n(t) + h(t) if signal is present(3.1)
where n(t) is the noise inherent in the detector, assumed to be a stationary
Gaussian process with mean zero. The sensitivity of the instrument can be
characterized by the (one-sided) power spectral density Sn(f) defined by
〈n(f)n∗(f ′)〉 =1
2Sn(|f |)δ(f − f ′) (3.2)
where 〈. . .〉 denotes the ensemble average over detector noise, and the tilde
represents the forward Fourier transform,
q(f) =
∫ ∞−∞
q(t)e−2πiftdt. (3.3)
3.2.1 The Inspiral Waveform
The gravitational-wave strain incident at the interferometer is given by
h(t) = F+(θ, ϕ, ψ)h+(t) + F×(θ, ϕ, ψ)h×(t) (3.4)
where the detector antenna response functions F+ and F× are functions of
(θ, ϕ) — the standard spherical polar co-ordinates measured with respect
to the detector’s frame, and ψ is the polarization angle. The detector an-
tenna response functions, F+ and F×, can be found in [121]. The + and ×polarizations of the waveform are
h+(t) =
(1 + cos2 ι
2
)A(t) cos (φ(t) + φc) (3.5)
and
h×(t) = (cos ι)A(t) sin (φ(t) + φc) . (3.6)
For non-spinning binaries with component masses m1, m2 in the range

3.2. METHODOLOGY 63
of (1 − 3)M — which we will hereafter assume — the waveforms can be
modelled to very high accuracy using the Restricted post-Newtonian (PN)
expansion [9, 41, 131] in the LIGO band (assumed to be 10-1500 Hz for
advanced LIGO). For restricted waveforms, only the leading order of the
amplitude A(t) is taken,
A(t) = −GMη
Dc2
(η
5GM/c3(tc − t)
)−1/4
, (3.7)
where M = m1 +m2 is the total mass, and η = m1m2/M2 is the symmet-
ric mass ratio. The phase of the gravitational waveform φ produced by a
coalescing compact binary system evolves at twice the rate of the instanta-
neous orbital phase. The orbital phase can be approximated via the post-
Newtonian expansion. To second post-Newtonian order the phase of the
inspiral gravitational waveform is [9]
φ(t) = −2
η
[Θ(t)5/8 +
(3715
8064+
55
96η
)Θ(t)3/8
−3π
4Θ(t)1/4
+
(9275495
14450688+
284875
258048η +
1855
2048η2
)Θ(t)1/8
].
(3.8)
Where we have used the convenient dimensionless time parameter Θ,
Θ(t) =
(c3η
5GM
)(tc − t). (3.9)
In addition to the component masses m1,m2, there are several unknown
parameters: the time of coalescence tc, the phase of the gravitational wave-
form at coalescence φc, distance from observer to source D, the inclination
angle of the binary’s orbital plane relative the line of sight ι, and the polar-
ization angle ψ. One can use the linear combination trigonometric identity
a cos θ + b sin θ =√a2 + b2 cos(θ − α) (3.10)

64 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
where tanα = b/a to re-express the strain (3.4) as
h(t) =D
Deff
A(t) cos(φ(t)− φ0) (3.11)
=(1 Mpc)
Deff
[hc(t) cosφ0 + hs(t) sinφ0] , (3.12)
where the factor Deff obtained from the trigonometric identity (3.10) is
Deff =D√
F 2+ (1 + cos2 ι)2 /4 + F 2
× (cos ι)2(3.13)
and φ0, an unknown phase term is
φ0 = arctanF× (2 cos ι)
F+ (1 + cos2 ι)− φc. (3.14)
Here we define hc and hs as the “cosine” and “sine” components of the gravi-
tational waveform. They are equivalent to the polarizations of a gravitational
waveform that would be produced by an optimally orientated inspiralling bi-
nary. An optimal orientated binary system is one that has its orbital plane
perpendicular to and has its orbit centered on the detector’s z-axis (i.e. where
the unknown phase term would be φ0 = 0 and φ0 = π/2 respectively). Al-
though not strictly necessary, the usual convention is to scale the cosine and
sine components to an optimally orientated template at a distance of 1 Mpc,
which we have done by setting D in equation (3.12). Hence the cosine and
sine components are defined as
hc(t) = A1 Mpc(t) cosφ(t), (3.15)
hs(t) = A1 Mpc(t) sinφ(t) (3.16)
where A1 Mpc is simply (3.7) with D = 1 Mpc.

3.2. METHODOLOGY 65
3.2.2 Two-Phase Matched Filter
The matched filter is the optimal linear filter for detecting known signals in
noisy data [122]. In this paper, we will follow the derivation of the matched
filter as it appears in section III of [132], which itself is based on classical
signal analysis methods. We define the output of the matched filter as a
correlation of the detector data s and the filter Q, weighted by the noise-
spectral density Sn(|f |)
z = 2
∫ ∞−∞
s(f)Q∗(f)
Sn(|f |) df. (3.17)
Note that z may be a complex value depending on the choice of Q. In the
case that the detector data contains Gaussian noise n(t) only, the expectation
value of the matched filter output z is zero. In such a case, the variance of
the output of the matched filter z is
σ2Q = 〈z · z∗〉 = 2
∫ ∞−∞
∣∣∣Q(f)∣∣∣2
Sn(|f |) df. (3.18)
Let us assume the gravitational waveform is present in the detector data,
ending at some time tc not known a priori. There is also a constant phase
term φ0 that is not known ahead of time. A common way [41, 127, 132] to
search for the unknown time of coalescence tc and phase term φ0 is to filter
both components hc and hs (which correspond to orthogonal phases φ0 = 0
and φ0 = π/2) separately and then combine them to form a complex signal.
This can be done by using the complex filter
Q∗(f) =[h∗c(f) + ih∗s(f)
]e2πiftc , (3.19)
where we now explicitly use h(f) to represent the Fourier transform of h(t)
when tc = 0. This convention shall be used throughout the remainder of the
paper. This way, the unknown time of coalescence tc can now be searched
over as an extrinsic parameter by changing the value of tc in the complex

66 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
matched filter
z(tc) = 2
∫ ∞−∞
s(f)h∗c(f)
Sn(|f |) e2πiftcdf
+i2
∫ ∞−∞
s(f)h∗s(f)
Sn(|f |) e2πiftcdf.
(3.20)
This is a cross correlation of the components hc and hs with detector data
s, weighted by inverse noise spectral density. The real part corresponds to
the matched filter output for the (real) template hc, and the imaginary part
corresponds to the matched filter output for the (real) template hs. In the
stationary phase approximation [133] the components hc and hs are exactly
orthogonal. It then follows that hc(f) = −ihs(f) for f > 0. When this
property is applied to equation (3.20), we have the form of the two-phase
matched filter as
z(tc) = 4
∫ ∞0
s(f)h∗c(f)
Sn(|f |) e2πiftcdf, (3.21)
commonly found in inspiral search papers [41, 127]. In this paper we prefer
to maintain the form of the two-phase filter in equation (3.20). Following
convention (c.f. [124]), the amplitude signal to noise ratio (SNR) ρ is de-
fined as the absolute value of the two-phase matched filter z divided by the
standard deviation of its real part:
ρ(t) =|z(t)|σ
(3.22)
where
σ2 = 2
∫ ∞−∞
∣∣∣hc(f)∣∣∣2
Sn(|f |) df. (3.23)
In the absence of a waveform, the SNR squared ρ2 is Chi-square distributed
with two degrees of freedom (one for each of the components). Hence the
probability of finding an SNR value greater than ρ∗ in the absence of a

3.2. METHODOLOGY 67
waveform is [125]
P (ρ2 > ρ2∗) = e−ρ
2∗/2. (3.24)
3.2.3 Discrete Time Domain Filtering
The two-phase matched filter (3.20) is a cross correlation of each component
hc,s(t) and the detector output s(t), weighted by the inverse noise spectral
density Sn(f). By defining the quantity x as the over -whitened strain data,
x(t) =
∫ ∞−∞
s(f)
Sn(|f |)e2πiftdf, (3.25)
we can use the cross-correlation theorem to define the two-phase matched
filter (3.20) in the time domain:
z(t) = 2
∫ t
−∞x(t′)hc(t
′ − t)dt′ + i2
∫ t
−∞x(t′)hs(t
′ − t)dt′ (3.26)
= 2
∫ t
−∞x(t′)h(t′ − t)dt′ (3.27)
where we have redefined hc(t) and hs(t) to represent the cosine and sine
components (3.15) and (3.16) when tc = 0. For simplicity of later equations,
we define h(t) = hc(t) + ihs(t) = A1 Mpc(t)eiφ(t) where the amplitude and
phase terms have tc = 0.
In practice the detector data s(t) is sampled at intervals of ∆t. The
discretized form of the continuous time domain matched filter (3.27) is
zk = 2k∑
j=−∞xjhj−k∆t (3.28)
where the index k denotes discretely sampled times of t, namely tk = k∆t.
In practice, the inspiral waveform template hi is bounded (because the de-
tector is only sensitive over a bandwidth) and the summation becomes finite,
making this a finite impulse response (FIR) filter.

68 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
3.2.4 Infinite Impulse Response Filter
Now let us introduce an alternative digital filter, the infinite impulse response
(IIR) filter. The difference equation of a general IIR filter is,
yk =N∑n=1
anyk−n +M∑m=0
bmxk−m (3.29)
where yk is the filter output at time step k (tk = k∆t), xk is the filter input,
and a’s and b’s are complex coefficients.
Examples of IIR filters in common usage are Chebyshev, Butterworth and
elliptic filters [134, 135]. IIR filters use much less computational resources
than an equivalent FIR filter. This is because they have “memory” — the
previous outputs are fed back into the filter. However digital IIR filter design
is a more complex process than FIR design. Obtaining the coefficients is
usually done by first constructing an equivalent analog filter and applying
well-known methods, such as the bi-linear transform or impulse invariance.
Multiple IIR filters used together have different forms, such as direct form
I & II, cascade (series) and parallel. In a series configuration, the overall
transfer function is the multiplication of each IIR filter transfer function.
In a parallel bank of IIR filters, where the output is summed together, the
overall transfer function is the summation of the different transfer functions.
First, let’s analyze the simplest single-pole IIR filter. The difference equa-
tion of this filter is
yk = a1yk−1 + b0xk. (3.30)
A solution to this first-order linear inhomogeneous difference equation is
yk =k∑
j=−∞xjb0a
k−j1 . (3.31)
By defining the complex coefficient a1 in the form
a1 = e−(γ+iω)∆t (3.32)

3.2. METHODOLOGY 69
+
×
×
Figure 3.2: A signal processing schematic showing the flow of data througha digital single-pole IIR filter. The input, xk is multiplied by a complexconstant b0, then added to the previous output that has been multiplied byanother complex constant a1, resulting in the current output yk. It shouldbe noted that this filter, in principle, should be have been run forever.
and comparing (3.28) and (3.31), it is easy to see that the output of the
simple filter (3.30) is the cross-correlation of xk and a complex sinusoid un
with frequency ω and a magnitude that increases with an exponent factor γ
for n < 0:
un = b0e(γ+iω)n∆tΘ(−n) (3.33)
where Θ(−n) is the Heaviside function.
3.2.5 Approximation to an inspiral waveform
Since φ(t) is not linear in time, a complex sinusoid (3.33) cannot approximate
the hc,s components of the inspiral waveform h(t) = A1 Mpc(t)eiφ(t). However
we can easily linearize the components by a first-order Taylor expansion
about the time t∗l :
A1 Mpc(t)eiφ(t) ' A1 Mpc(t
∗l )e
iφ(t∗l )+iφ(t∗l )(t−t∗l ); (3.34)
since the amplitude A1 Mpc(t) does not increase at the same rate as φ(t),
only a linear expansion of φ(t) is required. Multiplying by the window func-
tion eγl(t−tl)Θ(tl − t) makes this approximation an exponentially increasing

70 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
constant frequency complex sinusoid with cutoff time tl:
ul(t) = A1 Mpc(t∗l )e
i(φ(t∗l )+φ(t∗l )(tl−t∗l ))
× e(γl+iφ(t∗l ))(t−tl)Θ(tl − t). (3.35)
The expansion point t∗l is chosen to be near the cutoff time t∗l = tl − αTl,
where α is a tunable parameter and the interval Tl is the duration in which
the approximation is valid:
|12φ(tl)T
2l | = ε < 1 (3.36)
with ε a tunable parameter chosen to be to small. Equation (3.35) implies
that the coefficient b0 for the lth complex sinusoid is
b0,l = A1 Mpc(t∗l )e
i(φ(t∗l )+φ(t∗l )(tl−t∗l )) (3.37)
and the frequency ωl = φ(t∗l ).
In this paper, we chose the cutoff time tl of the first sinusoid to correspond
to the time at which the waveform has the highest frequency detectable by
the LIGO detector band. The next sinusoid is chosen by moving to an earlier
time, tl+1 = tl − Tl. Since we want the lth sinusoid to be mostly present on
the interval tl − Tl < t < tl, we choose the damping factor to be γl = β/Tl,
where β is a tunable parameter. This procedure is repeated until the time tl
corresponds to a time in the waveform that has frequency below the LIGO
detector band. Hence the number of sinusoids is dependent on the value
of ε, the rate of frequency change φ(t), which is dependent on the masses
of the system, and the detector bandwidth. For more information on this
procedure, see [4].
We can now approximate the components h(t) = A1 Mpc(t)eiφ(t) by an ad-

3.2. METHODOLOGY 71
dition of a series of damped sinusoids u(t) with cutoff times tl:
A1 Mpc(t)eiφ(t) ' U(t) =
∑l
ul(t)
=∑l
b0,le(γl+iωl)(t−tl)Θ(tl − t). (3.38)
Figure 3.3 shows an illustration of how damped constant-frequency sinusoids
can add to give an inspiral like waveform.
(e)
(d)
...
(c)
...
(b)
(a)
Figure 3.3: An illustrative diagram demonstrating the ability to linearlysum exponentially increasing constant-frequency sinusoids to approximatean inspiral like waveform. The top three panels (a-c) show three examplesinusoids with different damping, frequency and cutoff time factors. Panel(d) shows the linear addition of all the sinusoids (at different scales). Panel(e) shows the exact inspiral-like waveform. Note that this figure is only forillustrative purposes.

72 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
3.2.6 Summed Parallel IIR filtering
Each complex sinusoid ul(t) in equation (3.38) can be searched for in the data
x using the single pole IIR filter (3.30). Here the cutoff time is incorporated
by running each filter on a delay, dl = tl/∆t. The output of the lth filter at
time k is
yk,l = a1,lyk−1,l + b0,lxk−dl . (3.39)
The linear summation of the output of all filters is the cross-correlation of
the data x and the approximate waveform U(t) in (3.38):
zk ' 2∆t∑l
yk,l. (3.40)
Here z is equivalent to the value computed by the discrete time domain two
phase filter (3.28) when using a template h(t) = U(t). From equation (3.22),
it follows that the absolute value of the summation (3.40) divided by σU is
the SNR, which we term the output of the Summed Parallel Infinite Impulse
Response (SPIIR). The normalization factor σU is defined as
σ2U = 4
∫ ∞0
∣∣∣Uc(f)∣∣∣2
Sn(|f |) df, (3.41)
where Uc(f) is the Fourier transform of the real part of U(t), which approx-
imates hc(t). The similarity of the SPIIR output and the matched filter
output will depend on how well U(t) approximates the given template.
3.3 Implementation for Performance Testing
3.3.1 IIR bank construction
To confirm the ability of the SPIIR method to recover a good SNR, it is first
necessary to show that the approximate inspiral waveform (3.38) is a good
“match” to the theoretical inspiral waveform (3.12). We define the overlap

3.3. IMPLEMENTATION FOR PERFORMANCE TESTING 73
∆ as the inner product of the normalized approximate waveform U and the
template h:
∆ =1
σ · σU
√√√√(2
∫ ∞−∞
hc(f)Uc∗(f)
Sn(|f |) df
)2
+
(2
∫ ∞−∞
hs(f)Us∗(f)
Sn(|f |) df
)2
(3.42)
where Us(t) approximates hs(t). We initially approximate a canonical 2PN
1.4-1.4 M inspiral waveform band-limited to 10-1500 Hz using the value of
the tunable parameters ε, α and β to be consistent with the high overlap
results of [4]. With some minor variation of their values, we aim to recover
the highest overlap possible. Once a good choice of α and β is found for the
2PN 1.4-1.4 M template, we use the same values for other templates, but
vary the value ε (and consequently the number of IIR filters in each bank)
to see the effect on overlap.
3.3.2 Detector Data Simulation
To test the detection efficiency of the SPIIR method compared to the fre-
quency domain matched filter, we will filter two mock signals, one for which
the input data is just LIGO-like noise, and the other with the same noise
plus an inspiral waveform injection scaled to represent a source at a chosen
effective distance Deff .
For this test, we need to construct a finite segment of detector data to
filter. Being infinite impulse response filters, in principle the filters should be
run for an infinite length of the input data before the output has stablized.
In order to approximate this behavior, we need to run the IIR bank for a
finite “warm-up” period before the output is consistent with that of an IIR
filter that has been running for an infinite amount of time. We choose to
run each filter for 2 e-foldings of time before we accept the output as being
identical to one which has run for an infinite amount of time. Additionally,
since each IIR filter in the bank runs on a delay, the summed output of all
the IIR filters will not be produced until after the longest delay time (dmax)
has passed. The filter that has the longest delay (dmax) is also the one that

74 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
has the longest decay rate γmax. In total, the input data must be at least
dmax + 2γ−1max in length before any output is produced. Hence the length of
the input data is
Ninput = dmax + 2γ−1max +Nanalysis (3.43)
where Nanalysis is the length of analysis period, which we choose to be 4
seconds. Hence the 4 s SPIIR output will tell us whether there is an injection
that ended somewhere within those 4 seconds. At a sample rate of 4096 Hz,
the analysis period is Nanalysis = 16834 data points long. In our simulation,
we find dmax = 4081683 and 2γ−1max = 149432, resulting in Ninput = 4247499.
Noise generation
The LIGO-like noise data is produced by creating a normally distributed
white noise time series of length Ninput, then colouring it by the theoretical
advanced LIGO noise spectrum Sn(f) (3.46). We then over-whiten this time
series using equation (3.25) to produce the waveform-free noise input data x:
xnoise(t) = now(t). (3.44)
Waveform injection
We create our waveform injections by first producing an inspiral waveform
band-limited between 10 and 1500 Hz. The injection is padded with zeros so
that it has the length Ninput. The end of the waveform is chosen so that it
finishes somewhere after dm + 2γ−1m data points. The injection signal is then
over whitened using equation (3.25). The over-whitened injection can then
be placed in the over-whitened noise signal:
xnoise+injection(t) = xnoise(t) + how(t). (3.45)
Matched filter comparison
As a comparison, we will also perform a frequency domain correlation matched
filter. For this process, since the input data is already over-whitened, it only

3.3. IMPLEMENTATION FOR PERFORMANCE TESTING 75
needs to be cross-correlated with the waveform. Section 3.2.2 outlines how
this is done. The cosine component hc(t) gets pre-padded with enough zeros
to get to length Ninput. This ensures that hc(f) has the same spectral res-
olution as s(f). The matched filter (3.21) produces a time series of Ninput
length. However the first Ninput − Nanalysis data points are erroneous wrap-
around caused by the FFT. Only the interval [Ninput −Nanalysis + 1, Nanalysis]
is used to determine if a waveform is present.
3.3.3 Detection Efficiency
To test the detection efficiency of the SPIIR method compared to the tra-
ditional matched filter method we will construct several receiver operating
characteristic (ROC) curves for 2PN 1.4-1.4 M waveforms injected for dif-
ferent effective distances Deff . To create each ROC curve, we first find the
false alarm rate. The false alarm rate is found by realizing an Ninput length
LIGO-like noise time series, filtering this input data, and analyzing the out-
put of the 4 s analysis period (the SNR). We will count this realization as a
false positive if at any point within the 4 seconds the SNR goes over a given
SNR threshold. Several thresholds will be chosen, giving the false positive as
a function of threshold. After > 106 noise realizations, the false alarm rate is
simply the ratio of total number of false positives to number of noise realiza-
tions. Likewise, to see if the IIR filter doesn’t miss too many true positives,
we inject a 2PN 1.4-1.4 M waveform using the prescribed method in 3.3.2
for a given Deff into LIGO-like noise. After filtering, if at any point within
the analysis period the SNR is above a given threshold, this realization is
counted as a true positive. Again, after > 106 noise realizations, we calculate
the detection rate as a ratio of the total number of true positives to number
of realizations. The plot of false alarm rate versus detection rate gives the
ROC curve.

76 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
3.4 Results
3.4.1 Inspiral Waveform Overlap
Starting with the canonical 1.4-1.4 M second order post-Newtonian binary
waveform band limited to be between 10 and 1500 Hz we found, using the
parameters ε = 0.04, α = 0.99, β = 0.25 in the procedure outlined in Section
3.2.5, that we can recover an overlap of 99% using 687 IIR filters.
We find that increasing the value of ε will in general increase the overlap,
as the frequency space is more finely sampled. However there seems to be
a limit, as the damping factor γ causes the adjacent IIR filters to run into
each other.
With this choice of α and β we are able to recover a high overlap for
different mass pairs as well. Figure 3.4 shows the overlap as a function of
number of IIR filters for six different mass pairs.
200 400 600 800 1000 1200 1400
0.976
0.978
0.98
0.982
0.984
0.986
0.988
0.99
0.992
0.994
Number of sinusoids per waveform
Over
lap
1.4+1.4 M⊙1.0+1.0 M⊙1.0+3.0 M⊙2.0+2.0 M⊙2.0+3.0 M⊙3.0+3.0 M⊙
Figure 3.4: The overlap between the exact inspiral waveform and the ap-proximate inspiral waveform as a function of number of damped sinusoids.In general the greater the number of sinusoids per waveform, the greater theoverlap. However the choice of γls greatly affects the overlap.

3.4. RESULTS 77SN
R
t − τc (ms)−15 −10 −5 0 5 10 15
0
1
2
3
4
5
6
7
8
9
10
IIR filter output
Matched filter output
−1 0 17.5
8
8.5
Figure 3.5: The SNR output of both the SPIIR method and a traditionalmatched filter method. The plot is centered on t − τc where τc is the timeat which the injection ends. From the two curves, it is clear that the SPIIRmethod can return a very similar SNR to that from the optimal filter. Theinset shows a close-up of the time around t = τc to show how similar the twomethods are.
3.4.2 Ability to Recover SNR
Figure 3.5 shows the SNR produced from both the matched filter technique
and the SPIIR method. The input time series is constructed following Section
3.3.2. The injection of a 2PN 1.4-1.4 M waveform scaled for an effective
distance of 500 Mpc is added to LIGO-like noise. The x-axis of the plot is
centered about the end of the injection (t = τc), which is directly in the
middle of the analysis period. Around this time, the SNR peaks to 8, which
is near the expected value of 7.9 for an injection at this distance. This plot
shows that the SPIIR method is capable of recovering a very similar SNR to
the matched filter at all times.

78 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
3.4.3 Detection Efficiency
We analyzed over 106 independent noise realizations, for which the waveform
had been injected at Deff of 500, 600, 700, 800 Mpc. We performed both
IIR filtering and traditional matched filtering. Figure 3.6 shows that the
SPIIR method recovers most of the same events as the traditional matched
filter method. At false alarm rates of greater than 10−5, the SPIIR method
recovers greater than 99% of the injections recovered by the matched filter
when searching for injections at an effective distance of 500 Mpc (SNR∼8).
Even in the worst case, at a false alarm rate of 10−6, the SPIIR method
catches 4.5% of injections scaled at an extreme 800 Mpc (SNR∼5), whereas
the matched filter catches 5% of injections at this scale.

3.4. RESULTS 79
False Alarm Rate
De
tectio
n R
ate
SNR ~8 (500 Mpc)
SNR ~6.6 (600 M
pc)
SNR ~
5.7(
700
Mpc
)
SNR
~5
(800
Mpc
)
10−6
10−5
10−4
10−3
10−2
10−1
100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SPIIR Method
Matched Filter
Figure 3.6: The receiver operating characteristics (ROC) of both the IIR filtermethod and the traditional matched filter method. The x-axis shows the falsealarm rate, and the y-axis the detection rate. A one-to one relationship,which is the worst case scenario, is shown by the boundary of the shadedarea. We show four different ROC curves, where each curve represents thedetection rate as a function of false alarm rate for waveforms injected ateffective distances of 500, 600, 700 and 800 Mpc (SNR ∼ 8, 6.6, 5.7 and 5respectively).

80 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
3.5 Summary and Discussion
We have demonstrated that the through the use of a parallel bank of sin-
gle pole IIR filters, it is possible to approximate the SNR derived from the
matched filter with greater than 99% overlap. The main advantage of our
SPIIR method is that it operates completely in the time domain, and in
principle it has zero latency (not taking into account whitening or computa-
tional time). The SPIIR method recovers most of the injections the optimal
matched filter recovers.
The use of a bank of simple IIR filters for each template as opposed to
the matched filter method enables us get two extra processes for minimal
additional cost. The first is that the individual IIR filter outputs can be
arranged into groups, such that their total summed output is roughly in-
dependent and orthogonal to each other. This enables, with minimal extra
overhead, the calculation of a χ2 distributed statistic, giving a secondary
method of verification. We will demonstrate this in an upcoming paper. The
second natural advantage of using a parallel bank of single-pole IIR filters
is that they can easily be executed in parallel using multi-threaded proces-
sors, such as graphics processing units (GPUs). Indeed, a side study has
shown that this is possible [136]. This leads to the future possibility that a
single personal computer may be able to process the detection of GWs from
inspiralling compact binaries.
A further way to reduce the computation of the IIR calculation is to split
the incoming data into differently down-sampled channels. The output of
each IIR filter in the bank is the correlation of a fixed frequency sinusoid and
the incoming data. For the sinusoids that have frequencies <124 Hz, the in-
coming data need only be sampled at 256 Hz. The current pipeline of LLOID
uses a similar multi-channel down-sampling in their detection pipeline. Their
pipeline consists of the integration of the open-source real-time multimedia
handling software gstreamer and the LIGO Algorithm Library (LAL) [130].
This software library is an ideal platform to integrate the SPIIR method.
The total computation can also be further reduced by sharing IIR filters (via
interpolation) between different templates [4].

3.6. ACKNOWLEDGEMENTS 81
Although the design of the IIR filter so far only applies to chirping, post-
Newtonian approximation inspirals, we have performed preliminary tests us-
ing more complicated combinations of single-pole IIR filters to replicate the
waveform of an inspiral with spin. If the amplitude/frequency beating of a
spinning inspiral waveform can be simulated by the linear addition of two
different non-spinning inspirals with different masses, then it can be approx-
imated by a linear addition of damped sinusoids. In this case, the SPIIR
method can produce the SNR for the beating waveform. There is also the
possibility of using higher order IIR filters, although designing the coefficients
can be very difficult.
We foresee that the use of IIR filters for time domain filtering of Advanced
LIGO will be ideal, as the waveforms will be much longer. The frequency
domain matched filter will take more time to calculate GW triggers, essen-
tially ruling out the possibility of triggering the detection of prompt optical
emission related to neutron star mergers (GRBs). We have shown that the
use of a parallel bank of IIR filters requires less computational cost, with
minimal detection rate loss, and most importantly can be calculated in the
time-domain with near zero latency.
3.6 Acknowledgements
We would like to thank Kipp Cannon, Drew Keppel and Chad Hanna for de-
tailed discussion on the design and implementation of low-latency detection
algorithms. This work was done in part during the LIGO Visiting Student
Researcher program, which was partially funded by the 2009 UWA Research
Collaboration Award. This research was supported by the Australian Re-
search Council. SH gratefully acknowledges the support of an Australian
Postgraduate Award. LW acknowledges the support of the Australian Re-
search Council Discovery Grants and Future Fellow program.

82 CHAPTER 3. LOW-LATENCY GW DETECTION METHOD
3.7 Noise Spectral Density
The noise spectral density (in units of strain/√
Hz) we use is based on an
algebraic expression prediction of the Advanced LIGO noise curve given in
the LAL suite reference manual [137] defined by,
Sh(f) = S0
(f
f0
)−4.14
− 5
(f0
f
)2
+
111
1−(ff0
)2
+ 0.5(ff0
)4
1.+ 0.5(ff0
)2
;
(3.46)
where, f0 = 215Hz and S0 = 1049 strain/√
Hz.

Chapter 4
Multi-rate SPIIR method
The last chapter has shown that the SPIIR method can, in theory, recover
inspiral GW signals from Gaussian noise. In this short chapter, we will
discuss modifications to the method designed to improve performance when
using it as part of a real search pipeline for multiple inspiral templates. A key
aspect to this is the introduction of the multi-rate SPIIR method. Significant
computational gains can be made by employing this method. The theoretical
benefits of a multi-rate design were first discussed in the initial study of using
IIR filters [4].
Section 4.1 will introduce the notion of operating the SPIIR method at
multiple sample rates. The next section (4.2) will expand the use of the
multi-rate SPIIR method to accommodate filtering a template bank with
many templates. These modifications are important to discuss before moving
on to a full scale implementation of the SPIIR method in a realistic setting.
4.1 Multi-rate SPIIR filtering
The computational cost of the SPIIR method as it has been described is
proportional to the number of IIR filters NIIR per template, and the sample
rate fs at which the IIR filters operate. Each IIR filter (3.39) has 12 real
number floating operations (FLOP) per sample point. Hence to run the
SPIIR method in real-time (e.g. filter one second of data in one second of
83

84 CHAPTER 4. MULTI-RATE SPIIR METHOD
clock time) for data sampled at fs Hz requires
Cs = 12fsNIIR (4.1)
FLOPS (FLOP’s per second). For a given set of tunable parameters α, β and
ε listed in section 3.4.1 the total number of IIR filters for the 2PN 1.4−1.4M
canonical template is NIIR = 687. With a sample rate of 4096 Hz, the total
computational cost for the SPIIR method to search for this template in real-
time is ∼ 33.8 MFLOPS (1 MFLOPS = 106 FLOPS).
Given that an inspiral waveform has a broad frequency range (for Ad-
vanced LIGO from 10 Hz to fISCO), it is natural to assume that not all IIR
filters need to be filtering data sampled at the original sample rate of 4096 Hz.
It can be shown that the individual IIR filters can filter data sampled at only
twice of the IIR characteristic frequency f , which can be significantly lower
than 4096 Hz, without a significant loss of signal. This was first considered
in [4].
The factor at which the input strain data can be decimated can be de-
termined by each filter’s characteristic frequency f , the native sample rate
f0 = 1/∆t, and a small > 1 padding factor p. In practise, it is generally
easier to choose a decimation factor M (the ratio of native sample rate f0 to
new sample rate fs) to be a power of two,
M = 2−dlog2(2pf/f0)e = f0/fs. (4.2)
Hence the total computational cost of the multi-rate SPIIR method to search
for a template in real-time scales as
Ctot =∑s
12fsNIIR,s. (4.3)
Where the summation is over sub-groups s for each sample rate fs and
NIIR,s is the number of IIR filters in the s sub-group (NIIR =∑
sNIIR,s).
For the canonical template, with a padding factor of p = 1.1 and a min-
imum cutoff frequency of 10 Hz, we expect eight sub-group sample rates:

4.1. MULTI-RATE SPIIR FILTERING 85
32, 64, 128, 256, 512, 1024, 2048, 4096 Hz.
Before the input strain data can be decimated and filtered it must first
have a low-pass filter applied. The computational cost of the down-sampling
process is trivial and can be ignored, as it is only performed once for all
templates (as will be shown in the next section).
In order to run the IIR filter sub-groups s at the reduced rate fs = f0/M,
first the coefficients a1, b0 and delay d must be modified. As can be seen
from the definition of a1 in equation 3.32, the new feed-back coefficient a′1needs to be exponentiated by M. The new delay d′ is just the old delay
divided by M to the nearest integer. The new feed-forward coefficient b′0needs to have a phase shift applied because the new delay d′ is in a new
position, possibly up to M/2 original samples away from where the original
d was. Without correction, this could introduce a phase shift of up to πp, as
well as an amplitude change by eγ(M/2). The following equations define the
transformations to the new coefficients and delay;
a′1 = aM1 , (4.4)
b′0 = b0aMd′−d, (4.5)
d′ = d(d+ 1)/Me. (4.6)
Sub-groups of IIR filters can now filter data that has first been down-
sampled to a sample rate fs. The output from each IIR filter group can be
added together, up-sampled by a power of two and added to the next highest
sample rate. See figure 4.1 for a visual explanation of the data flow in the
multi-rate SPIIR method.
The cost of up-sampling the output of each filter sub-group scales as the
number of templates increases, and must be considered to show that the
reduction in computational cost of using the multi-rate scheme is beneficial.
For each successive up-sample, a sample point with zero value is inserted
between adjacent samples, and a low-pass filter with N↑ coefficients must
be applied. Hence the computational cost of each up-sampler scales with
the sample rate fs and the number of low-pass filter coefficients N↑. The
number of low-pass filter coefficients N↑ will depend on the type and quality

86 CHAPTER 4. MULTI-RATE SPIIR METHOD
x zFilter sub-group 0 +
2048 HzFilter sub-group 1 +
Filter sub-group s
... ...
4096 Hz
+
...
Figure 4.1: A schematic of the multi-rate SPIIR pipeline. In this design, theincoming data x is down-sampled simultaneously to different sample ratesfs. Each sample rate stream is then filtering by using the SPIIR method.The output of the each SPIIR block is up-sampled by a power of two andadded to the next highest SPIIR block’s output.
of up-sampler used, but it will be typically be between 16 and 192.
Table 4.1 shows the division of IIR filter sub-groups for the canonical
1.4-1.4 M template with the α, β and ε values as used in section 3.4.1.
With multi-rate SPIIR filtering and up-sampling, the total cost to search for
a single template in real-time is between 1.633 and 3.057 MFLOPS, a saving
of 90-95%.

4.2. MULTIPLE TEMPLATES 87
Table 4.1: The relationship between the characteristic frequency f (in unitsof Hz) of a filter and the decimation factor M in order to run it at a samplerate f s is shown. On the right hand side the number of IIR filters pergroup (NIIR,s) is shown, along with real-time computational cost in units ofMFLOPS of the SPIIR method both with and without the multi-rate applied(CIIR and C∗IIR respectively). The scale value of the computational cost of theup-sampler is also shown.
M fs( Hz) f ( Hz) NIIR,s C∗IIR CIIR C↑ (×N↑)1 4096 1
p[1024, 2048) 0 0 0 4096
2 2048 1p[512, 1024) 13 0.6390 0.3195 2048
4 1024 1p[256, 512) 22 1.081 0.2703 1024
8 512 1p[128, 256) 41 2.015 0.2519 512
16 256 1p[64, 128) 72 3.539 0.2212 256
32 128 1p[32, 64) 127 6.242 0.1951 128
64 64 1p[16, 32) 225 11.06 0.1728 64
128 32 1p[8, 16) 187 9.191 0.0718 32
Total 687 33.77 1.503 8160
4.2 Multiple templates
So far we have described the SPIIR method for a single canonical 1.4−1.4M
template. As stated in section 2.5.3, a real inspiral search pipeline will need
to search for many templates over a large parameter space. The multi-rate
SPIIR method described in the previous section can be easily expanded to
search for multiple templates. The down-sampled detector strain can provide
the input for a number of IIR filter sub-groups. See figure 4.2.
For each template, a different set of IIR filters is needed for the SPIIR
method. Using the Taylor-expansion method prescribed in section 3.2.5, the
total number of IIR filter coefficients NIIR scales as,
NIIR ∝f−5/6min − f−5/6
max
ε1/2M5/6(4.7)
Hence each template will have a different number of IIR filters NIIR. For
convenience in the actual implementation of the SPIIR method, we have
chosen to organise the IIR coefficients as follows:

88 CHAPTER 4. MULTI-RATE SPIIR METHOD
• Sort template bank by chirp mass
• For each template place IIR filters into S sub-groups using the method
prescribed in section 4.1
• For each template place the sub-group coefficients a′, b′ and d′ and
delays s as rows into the matrices As, Bs and Ds.
• Pad each row of each matrix with zeros so that all matrices are regular.
Hence each matrix will have N1IIR,s columns and M rows (one for each
template). For example a given A matrix is arranged as
A =
a1[1, 1] a1[1, 2] · · · a1[1, N1
IIR]
a1[2, 1] a1[2, 2] · · · a1[2, N2IIR] 0 · · · 0
... a1[3, 2]...
a1[M, 1] a1[4, 2] · · · a1[M,NMIIR] 0 · · · 0
, (4.8)
where there will be S As, Bs and Ds matrices (one for each sample rate).
Packing the matrices this way implies that there will be some computer
cycles wasted by using IIR filters with coefficients that are zero. However, in
practise, the number of templates per instance of the pipeline is limited (to
100 templates). As the templates are sorted by chirp mass, there will not
be a significant number of zeros in any given row and the matrix will be far
from sparse.

4.2. MULTIPLE TEMPLATES 89
Filter sub-group 0 +
Filter sub-group 0 +
Filter sub-group 1 +
Filter sub-group 1 +
32 Hz
Filter sub-group s +
Filter sub-group s +
...
...
... ...
......
...
...
...
...
...
z
z
2
M
1
2048 HzFilter sub-group 1 +
Filter sub-group s
... ...
+
...
x z+4096 HzFilter sub-group 0
1
2
M
1
2
M
1
2
M
Figure 4.2: A schematic of the multi-rate SPIIR pipeline with many tem-plates. This is an extension to the multi-rate SPIIR method discussed insection 4.1. The advantage of this implementation is that there is only oneset of down-samplers for all templates.

90 CHAPTER 4. MULTI-RATE SPIIR METHOD
4.3 Discussion
In this chapter, we have introduced two modifications to the SPIIR method.
We have shown there are significant computational cost savings (up to 90-
95% per template) to be made simply by operating the IIR filters at reduced
sample rates. The extension of the “multi-rate” SPIIR method to search
for multiple templates has also been shown. Of specific interest for later
chapters is the introduction of the As, Bs and Ds matrices. With these
concepts introduced, the following chapters can focus on the application of
the SPIIR method in a realistic inspiral search environment.

Chapter 5
Offline SPIIR pipeline
This chapter will describe the implementation of the SPIIR design in the
form of an executable computer application available to the greater GW
community, and its use in a full scale inspiral search pipeline. The pipeline
includes template bank construction, interferometric data collection, filter-
ing the data into a series of GW triggers, trigger coincidence tests between
detectors, vetoes based on instrument characterisation, and the calculation
of false alarm rates for coincident triggers into candidate events.
As a preliminary test of the new implementation, a search for low-mass
NS-NS inspiral signals in existing initial LIGO detector data was performed
(approximately two weeks of data from LIGO’s fifth science run — S5). Re-
sults from other inspiral searches from these science run data were published
in [138]. The aim of using these data was not to find any signals missed by
other searches, but rather to test the SPIIR method on real detector data.
This was a necessary step to confirm that the SPIIR method behaves as
expected in real detector data. Both the SPIIR method and the matched
filter method are optimised to maximise the SNR of a signal present in sta-
tionary Gaussian noise. However it is well known that to date GW detector
data are non-stationary and non-Gaussian [139]. Although non-stationarity
occurs on many timescales, we are mostly concerned with how the SPIIR
method will respond to short durations of non-stationarity, generally called
glitches. Glitches can cause the SNR to peak simply due to noise transients.
91

92 CHAPTER 5. OFFLINE SPIIR PIPELINE
To compare how the SPIIR method behaves in non-Gaussian data, we also
performed an identical analysis in Gaussian noise generated with the initial
LIGO design sensitivity.
Although the SPIIR method was designed for low-latency, and therefore is
best used as part of an online search pipeline, in this chapter we demonstrate
its ability to search for inspiral signals in an offline pipeline. Since we are
demonstrating its ability on initial LIGO data, the templates searched for
began at 40 Hz, and not the Advanced LIGO 10 Hz which the SPIIR method
is computationally optimised for. Since we were operating in an offline mode,
low latency was not considered.
The main reason to run in an offline configuration was to show the
pipeline’s detection efficiency and sensitivity. The detection efficiency of the
pipeline is a measure of how many signals the pipeline is expected to recover
as a function of distance. The volume of space that the pipeline is sensitive
to can be measured by the efficiency-weighted volume integral. We were able
to measure this by injecting many simulated inspiral signals into the data
with randomly chosen parameters drawn from a uniform distribution. If it is
assumed that the noise in the detector is Gaussian, the expected SNR of an
injected signal is a function of known intrinsic and extrinsic parameters, and
inversely proportional to the effective distance (which can be measured). A
theoretical Gaussian-noise detection efficiency can then be obtained indepen-
dently of our SPIIR pipeline. This provides an ideal method of characterising
the detection efficiency for comparing our pipeline with other low-mass in-
spiral pipelines, which may have vastly different search conditions (such as
duration of search, number of injections, injection parameter space, etc).
By recovering the injected signals, we were able to test how well the SPIIR
method can estimate the measured parameters of the signals. Although
parameter estimation can be done better using other offline inspiral search
pipelines, it was particularly important to show that the time of arrival of the
signal in each detector was measured accurately. Since the SPIIR pipeline
was designed to provide triggers for EM follow-up, accurate arrival time
information is required for sky localisation.
The first section of this chapter will give a description of the offline SPIIR

5.1. THE SPIIR APPLICATION 93
application itself, and how it produces a database of GW triggers. Changes
made to this pipeline to make it an online pipeline will be discussed in chap-
ter 6. Section 5.2 will show how we divided up roughly two weeks of S5
data for analysis. Section 5.3 describes how the IIR template banks were
generated for the pipeline. To test the detection efficiency of the pipeline,
we performed the analysis both with and without injecting simulated inspiral
signals. Section 5.4 describes the parameters of the injected signals. We com-
pare the output of the SPIIR method in Gaussian noise to real non-Gaussian
S5 data in Section 5.5. In order to make confident detections, we introduce
the ranking statistic, false alarm rate, in Section 5.6. Section 5.9 shows how
well the pipeline recovered the injected signals, and Section 5.10 shows how
well the injected signal parameters (including the timing accuracy) were re-
covered. Finally, we discuss how the pipeline performed overall, and what
its limitations are.
5.1 The SPIIR application
The SPIIR method has been realised through an executable computer ap-
plication called as gstlal iir inspiral. This application1 is intercon-
nected with the greater GW analysis software library, LIGO Algorithm Li-
brary (LAL)[140]. The gstlal iir inspiral application resides within the
gstlal project [130], which wraps, amongst other things, components of
the LAL library into GStreamer elements. GStreamer [141] is a multimedia
framework consisting of a suite of pre-written signal processing tools. It pro-
vides a framework for programmers to build custom media processing appli-
cations. Typical examples include applications that can record and playback
audio/video sources from either disk or streaming sources. Programmers can
build a network of interconnected media-handling components, called ele-
ments, that apply transformations to packets of flowing data. GStreamer’s
plug-in environment allows programmers to build their own elements to pro-
cess data packets in a variety of ways. This framework allows GW data
1written by my collaborators and myself

94 CHAPTER 5. OFFLINE SPIIR PIPELINE
analysts to concentrate on writing GW-analysis specific elements whilst hav-
ing access to common digital signal processing tools (such as re-samplers
and amplifiers) and without having to be concerned with the management of
real-time data processing. For instructions on how to install gstlal please
see the project page [130].
The gstlal iir inspiral application searches for templates in multiple
detector data streams over a fixed period of time. The end result is a database
of triggers and related information. At this stage, the triggers have not been
ranked by significance. That comes at a later stage of the overall offline
SPIIR pipeline (discussed in section 5.7).
5.1.1 Internal structure of gstlal iir inspiral
The gstlal iir inspiral application consists of a collection of intercon-
nected GStreamer elements that operate on discrete packets of data known
as buffers. Each buffer contains a finite duration of discretely sampled time
series data, with particular attributes, e.g. timestamp, duration, sample rate,
data format, etc. Each buffer can also have a number of parallel channels.
Buffers are passed between elements, where each element is responsible
for some transformation of the input buffer into an output buffer. Figure 5.1
schematically describes the flow of data from raw gravitational frame files
(the strain data), through several processing stages, ultimately producing a
database of triggers.
At execution, the gstlal iir inspiral application is provided with a
start and end time with which to search for inspiral signals. The first stage
of gstlal iir inspiral is to read interferometric strain data from disk, and
package it into buffers. Within each instance of gstlal iir inspiral there
is one source of data for each detector i. The GW strain data is read from
gravitational wave frame (gwf) files stored on disk. The gstlal iir inspiral
application is provided with a path to the gwf files and a list of time segments
that correspond to “science mode”. Science mode refers to segments of time
when each detector was in lock (i.e the laser in the interferometer was res-
onant in the arm cavity), there was no other experimental work performed

5.1. THE SPIIR APPLICATION 95
Template M
yes no
Start time, end time,Science segments list.
Path to frame files
Flag as gap buffer
Veto segments list
Injection file
Apply SPIIR methodfor each template
...
Does SNR goabove threshold?
IIR templatebank file(s)
Calculate statistic
Detector 1
Template 1
yes
Whiten data
Store trigger information in database
*
Initial PSD
Create gap buffer
Inject simulation
Is thisanalysis segment in
science mode?
Injectsimulation?
yes no
Should this buffer be vetoed?
yes no
Create buffer
Is trigger coincident between
detectors?yes no
Mark as coincident Mark non-coincident
Does SNR goabove threshold?
Calculate statistic
Detector n
yes
...
...
...
...
...
yes no
Flag as gap buffer
Apply SPIIR methodfor each template
Whiten data
*
Create gap buffer
Inject simulation
Is thisanalysis segment in
science mode?
Injectsimulation?
yes no
Should this buffer be vetoed?
yes no
Create buffer
...
Figure 5.1: The flow of data through gstlal iir inspiral. Given a startand end time, data follows synchronously through a series of stages, explainedin the text. After conditioning the data for each detector (up to the ∗), theSPIIR method as described in Section 4.1 and schematically shown in figure4.2 is applied to the data. At least one template bank file is required; howeverit is possible to have multiple template bank files that branch from the ∗ stage(not shown here due to complexity). At the application termination, a singledatabase containing trigger information and coincidence tables is written todisk.

96 CHAPTER 5. OFFLINE SPIIR PIPELINE
at the site, and the segment quality was confirmed by a human monitor. If
these conditions are met the strain data from the gwf files are packaged into
discrete buffers. If these conditions are not met, buffers are still created, but
have no data and are flagged as “gap” buffers. A gap buffer is a regular
buffer with a timestamp and a duration which has been flagged as having no
valid data. In this way, there is a continuous flow of buffers, regardless of the
status of the detectors.
At this point simulated inspiral signals can be injected into the buffers if
a list of injection parameters is provided. If no list is provided, no injections
will be made. The specific set of injections for this study will be discussed
in Section 5.4.
The next stage whitens the spectral properties of the data in the non-gap
buffers. The whitener element is provided with an initial PSD frequency
series which is an estimate of the average noise spectral properties of the
detector. Every 4 seconds, the Fourier transform of the last 8 seconds of
data is taken, and divided by the square root of the stored averaged PSD (the
ASD). The inverse Fourier transform of the resulting time series should have
approximately equal power in all frequency bins (i.e. white), and is scaled
so that the time series has (on average) mean zero, unit variance. Hence
the whitener element pushes out a single channel buffer every 4 seconds.
The stored PSD is a running estimate of the arithmetic mean square of each
frequency bin, which is updated up new incoming data.
Before searching for inspiral signals, a final veto stage is performed. A
veto segment list is provided to gstlal iir inspiral. A veto segment is
any time that was flagged as being not worthy of analysis for some other
reason. In our analysis, we only veto times of hardware injected signals. If
the buffer’s timestamp occurs within a veto segment, it is flagged as a gap
buffer.
The next stage is where the multi-rate SPIIR method as described in
Section 4.2 is applied to the single channel buffer containing whitened strain
data (with approximately zero mean, unit variance). In order to form a
continuous stream, we have taken the position of filtering gap buffers, but
only after setting the data within them to zero for all samples. The multi-rate

5.1. THE SPIIR APPLICATION 97
design as shown in figure 4.1 is applied to this buffer, ultimately producing
an output buffer for each detector with 2 × M channels, where M is the
number of templates searched for. There is one channel each for the real and
imaginary part of the complex SNR time series z/σ, for each template.
A peak finding algorithm is then applied to the complex time series from
each template in each detector. The triggering element finds the highest
value of the absolute SNR (= |z/σ|) for each template over a prescribed
time window. If this peak is over a given threshold, a consistency check
is performed to confirm that the shape of the SNR time series around the
peak conforms to one that would be expected if the SNR peak was caused
by a true signal. This has the same purpose as the χ2 consistency check
performed in other inspiral search pipelines based on matched filters [132] –
to distinguish SNR peaks due to true signals from those due to non-stationary
noise transients (glitches). However our method of calculating a χ2 statistic
differs greatly. In the presence of Gaussian noise, the expected SNR time
series is simply the auto-correlation of the whitened inspiral signal. Thus
if an inspiral signal is truly responsible for the SNR peak, it should look
something like the auto-correlation time series. Summing the squares of the
residuals of the measured and expected time series provides a χ2-like statistic
that acts as an indicator of the goodness of fit. Although in this study we call
that statistic the χ2 value, it is not strictly χ2 distributed in the presence of a
true signal or noise. However, as will be shown in Section 5.5, the χ2 statistic
we calculate can help to distinguish SNR peaks caused by true signals and
those caused by glitches, since the latter will not significantly match the
auto-correlation of the whitened inspiral signal. In this study, we chose to
use a time window of 4 seconds for the peak finding and SNR threshold of
4. Hence the triggering element passes buffers that at most have one trigger
per 4 seconds for each template. The intrinsic parameters relating to the
template responsible for the trigger, as well as the measured Deff and time of
arrival, are also recorded in the buffer. This defines a single detector trigger.
The final stage of gstlal iir inspiral is to perform a coincidence test
between detectors. A trigger is considered coincident between detectors if
it occurs within roughly the same time (considering the light-travel time

98 CHAPTER 5. OFFLINE SPIIR PIPELINE
between detectors), for exactly the same template. The trigger information
and a coincidence table is stored in memory and written to disk in the form
of a standard database when the application finishes.
5.2 Data for offline run
In order to test the gstlal iir inspiral application, we chose to analyse
data from approximately two weeks of LIGO’s S5 data from 28 July, 2007
01:46:35 UTC to 11 August, 2007 01:45:35 UTC. This time period was chosen
as the detectors were operating normally, and is a typical reflection of S5
data. Because we are only interested in triggers coincident between non-co-
located detectors, we only analysed data from detectors Livingston 1 (L1),
and Hanford 1 (H1).
Since we are testing the pipeline in an offline mode we can achieve faster
than real-time analysis (i.e. analyse approximately two weeks of data in less
than two weeks) by running many instances gstlal iir inspiral in parallel
across machines, each analysing short segments of time. Because coincident
triggers could only occur during times when both detectors were in science
mode, only the times when both H1 and L1 detectors were in science mode
were analysed. We chose to analyse segments in the following way;
• Take intersection of H1 and L1 science segments,
• For each segment, protract by 1024 seconds,
• Take union of the protracted segments,
• Break up segments longer than 30000 seconds into segments not greater
than 30000 seconds,
• Protract segments so that they overlap by 1024 seconds.
The final step overlaps each broken up segment by 1024 seconds so that no
signal is missed due to breaking up. Figure 5.2 shows the actual distribution
of analysed segments for this two week run. In total there were 63 time
segments to be analysed.

5.2. DATA FOR OFFLINE RUN 99
28Jul
00:00
29Jul
00:00
30Jul
00:00
31Jul
00:00
01Aug
00:00
02Aug
00:00
03Aug
00:00
04Aug
00:00
05Aug
00:00
06Aug
00:00
07Aug
00:00
08Aug
00:00
09Aug
00:00
10Aug
00:00
11Aug
00:00
Time (UTC)
H1 data
L1 data
H1 ∩ L1data
ProtractedH1 ∩ L1
Analysedsegments
(a)
01Aug
00:00
01Aug
02:00
01Aug
04:00
01Aug
06:00
01Aug
08:00
01Aug
10:00
01Aug
12:00
01Aug
14:00
01Aug
16:00
01Aug
18:00
01Aug
20:00
01Aug
22:00
Time (UTC)
H1 data
L1 data
H1 ∩ L1data
ProtractedH1 ∩ L1
Analysedsegments
(b)
Figure 5.2: Here we show how we chose to break up the two weeks of S5 datainto 63 analysed segments. Figure 5.2a shows the full analysis period fromthe beginning of 28 July, 2007 UTC to the end of 10 August, 2007 UTC. Fora visual reference of how the segmentation process was performed, Figure5.2b shows the break up on day five, 1 August, 2007.

100 CHAPTER 5. OFFLINE SPIIR PIPELINE
5.3 IIR Bank generation
The SPIIR element in each instance of gstlal iir inspiral requires the
As, Bs and Ds matrices introduced in Section 4.2 to filter the data. This
was done by providing gstlal iir inspiral access to a standard xml file
containing the matrices for each detector. The xml file also contains the
corresponding template bank intrinsic parameters (i.e. component masses).
The procedure to produce this xml file was a multi-step process as outlined
in figure 5.3.
Generate base
template bank
lalapps_tmpltbank
Split bank
by chirp mass
gstlal_bank_splitterGenerate
IIR template banks
gstlal_iir_bank
Measure PSD
gstlal_reference_psd
gstlal_iir_bank
gstlal_iir_bank
0000-H1_split_bank.xml
0001-H1_split_bank.xml
0012-H1_split_bank.xml
iir_0000-H1_split_bank.xml
iir_0001-H1_split_bank.xml
iir_0012-H1_split_bank.xml
reference_psd.xml.gz
bank.xml
... ......
Figure 5.3: A flow chart describing how IIR template banks were created.First we generated a list of mass pairs using lalapps tmpltbank in the formof a standard LAL xml document, e.g. bank.xml. The full list of templateswas divided into several subset lists, each containing at most 100 templates,sorted by chirp mass. Each subset list was recorded into a file, and along witha PSD frequency series was then passed to the gstlal iir bank applicationwhich resulted in a final IIR template bank xml file containing the As, Bs
and Ds matrices for that subset list.
First, a large template bank was produced using the LAL application
lalapps tmpltbank. In practise, this study was limited by available com-
puter resources, so the chosen parameter space was somewhat small. It was
designed to cover a component mass range of 1.1M–1.7M. By requiring

5.3. IIR BANK GENERATION 101
a minimal mismatch of 3%, lalapps_tmpltbank returned a template bank
with 1248 templates. The PSD used by lalapps_tmpltbank to place the
templates over the intrinsic parameter space was the initial LIGO S5 design
curve. Although the measured PSD changed over the two week analysis pe-
riod, the design PSD used to place the templates was conservative, meaning
that templates were over-sampled in parameter space. This meant that there
was no expectation of a drop in efficiency due to a poorly covered parameter
space.
A property of lalapps_tmpltbank is that for small parameter spaces, it
tends to place templates outside of the desired mass space, and also over-
populate the equal mass (η = 1/4) curve. Figure 5.4 shows distribution
of the 1248 templates generated in both component mass space and total
mass – symmetric mass ratio space. Many of the templates are actually out-
side the desired parameter space. We chose to include these templates in
our search, since they still correspond to NS-NS signals, albeit with slightly
higher masses.
In order to make the best use of computational resources, we chose to
run multiple instances of gstlal iir inspiral for different parts of the pa-
rameter space. We divided the full template bank into 13 subset template
lists each with 100 templates (except for the last subset, which contains
the remaining 48 templates). Each subset bank was then passed to the
gstlal_iir_bank application, along with a reference PSD, which used the
IIR coefficient generation algorithm described in Section 3.2.5 to create an
xml file containing the As, Bs and Ds matrices for each detector. The refer-
ence PSD used was determined by measuring the time segment data ahead
of time. During this procedure, we weighted the feed-forward b0 coefficients
by the inverse square root of the reference PSD, since the input data to the
filter was weighted by the inverse square root of the measured PSD (i.e. the
data was whitened). This application also calculated the auto-correlation
time series of each template and stored 100 samples either side of the peak
of each template’s auto-correlation in the xml file.
Using the IIR tuning parameters of α = 0.99, β = 0.25 and ε = 0.02, we
found that each IIR template had an overlap of at least 98.6% compared to

102 CHAPTER 5. OFFLINE SPIIR PIPELINE
1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4
Component mass 1, m1 (M)
0.9
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
Com
pone
ntm
ass
2,m
2(M
)
(a)
2.2 2.4 2.6 2.8 3.0 3.2 3.4 3.6
Total mass, M (M)
0.21
0.22
0.23
0.24
0.25
Sym
met
ricm
ass
ratio
,η(b)
Figure 5.4: The distribution of the 1248 templates is shown in both compo-nent mass (m1,m2) space (5.4a) and total mass – symmetric mass ratio space(5.4b). The target parameter space is shaded in grey. A known feature oflalapps tmpltbank is that it places many templates outside the target areafor small parameter spaces. Also, it seems to overpopulate the equal masscurve (m1 = m2, η = 1/4). The colours represent the 13 different subsettemplate lists that make up the full parameter space.
the 2PN waveform it was trying to approximate. Figure 5.5 shows the SNR
overlap as a function of total number of IIR filters and also of chirp mass.
This figure also shows how the total number of IIR filters per template (NIIR)
depends on chirp mass. Because the overlap is not 100%, we expect some
loss in detection efficiency, as was seen in the previous chapter 3.
The gstlal iir inspiral application is capable of processing multiple
template banks simultaneously by branching the data flow after whitening
the data (denoted by an ∗ in figure 5.1). This provides multiple threads
to better manage the execution of the application on multi-core CPU ma-
chines. Through trial and error, we found that a good combination of number
of template banks and template bank size for this study was five banks of
100 templates each. Since we had twelve template banks of 100 templates
each and one template bank of the remaining 48 templates, there were three

5.4. SIMULATED INSPIRAL SIGNALS 103
250 275 300 325 350 375Number of IIR filters
0.986
0.987
0.988
0.989
0.990
SN
Rov
erla
p
0.90 1.05 1.20 1.35 1.50Chirp massM (M)
250
275
300
325
350
375
Num
bero
fIIR
filte
rs
NIIR ∝M−5/6c
Figure 5.5: This series of plots show the SNR overlap of an IIR responsewith respect to its 2PN waveform, the total number of IIR filters in a giventemplate, and the chirp mass.
“bank sets” (template banks 1–5, 6–10, and 11–13 respectively). In total,
that meant each run required 189 (3 bank sets ×63 time segments) different
instances gstlal iir inspiral.
5.4 Simulated inspiral signals
In order to test the sensitivity of our pipeline to recover GW signals we
performed separate runs both with and without injecting simulated inspi-
ral signals into the detector data. By running the pipeline with injected
signals and searching for them in the list of candidates, we are able to eval-

104 CHAPTER 5. OFFLINE SPIIR PIPELINE
uate the detection efficiency of the pipeline. As discussed in Section 5.1,
when gstlal iir inspiral is supplied with a list intrinsic and extrinsic pa-
rameters, simulated inspiral waveforms are injected into the detector data
before the whitening stage. To be as realistic as possible, we chose to inject
waveforms with Newtonian order in amplitude and 3.5PN order in phase.
The current implementation of the IIR filter coefficient design (as described
in Section 3.2.5) has some problems generating 3.5PN based templates (be-
cause the 3.5PN phase is generally defined in the Fourier domain). However
in reality, a true signal could have any order of post-Newtonian amplitude
and phase. We were interested to see how well the SPIIR method could
recover 3.5PN signals from 2PN templates. We expected this to result in
some loss in detection efficiency; however since we chose to randomly draw
injections with component masses from a rather narrow mass range close to
the canonical 1.4M–1.4Mwaveform, we did not believe that using 2PN
templates to search for 3.5PN simulations would be a problem. Indeed, we
chose the component masses of the injections to be restricted to be between
1.39M and 1.41M. The reason for the narrow mass range was so that we
can build a smooth detection efficiency curve for a canonical 1.4M–1.4M
system.
The extrinsic parameters of the injected inspiral signals were randomly
drawn from the following distributions:
1. The injections were uniformly distributed across the sky (cos θ, ϕ),
2. The cosine of the inclination angle ι was uniformly distributed between
0 and 1 (no preference of orientation between the observer’s line of sight
and the binary direction),
3. The polarization angle ψ was distributed uniformly between 0 and 2π,
4. Physical distance D was distributed log uniformly. We chose to start
at a minimum distance of 770 kpc and go out to 40 Mpc,
5. In our injections, no spin was given to the simulations.

5.5. BEHAVIOUR IN NON-GAUSSIAN DATA 105
The time distribution of the injections must be limited in order to avoid
placing them too close together in time, which would cause them to overlap
and produce unexpected results. We chose the geocentric end time tc of the
injections to be uniformly distributed over a 20 second interval every 100
seconds. In theory this limited the number of injections we could do over the
two week run period. However we can simply do additional runs, each with a
different injection parameter list (drawn with a different random seed). The
number of injections could be arbitrarily high without affecting the response
of the SPIIR output. In practise, we chose six different injection lists.
As injections were uniformly distributed over time, we did not expect to
recover injections during times when at least one detector was not in science
mode, or one detector had a veto segment (see Section 5.2). Over the six
injection runs, there were 54424 injections over valid segments with a uniform
distribution of parameters.
5.5 Behaviour in non-Gaussian data
As discussed in Section 2.5.6, the SNR ρ is a well defined statistic to declare
detection in stationary Gaussian noise. As stated, it is well known that to
date GW detector data is non-stationary and non-Gaussian [139]. For this
reason, we compared the output of the SPIIR pipeline in real, non-Gaussian
S5 data to an identical run in Gaussian noise.
Our method of calculating the χ2 statistic (described in Section 5.1) differs
from the standard matched filter way [132]. However we find that the distri-
bution of χ2 values is sufficient to distinguish SNR peaks due to glitches from
those due to genuine signals. Figure 5.6 shows the distribution of recorded
single-detector ρ and χ2 values for triggers from both the non-injection run
(black crosses) and coincident triggers from the injection runs that were asso-
ciated with injections (red crosses). The top plot show the ρ-χ2 distribution
for the non-Gaussian S5 runs, and the bottom plot the Gaussian runs.
In the non-Gaussian run, glitches can for the most part be distinguished
from genuine noise or simulation events as they have larger χ2 values. How-
ever there is a small population of triggers that have large χ2 values for

106 CHAPTER 5. OFFLINE SPIIR PIPELINE
relatively small ρ values. These odd triggers were discovered to be misiden-
tified templates. Our pipeline requires triggers to be found in coincidence,
and for the ρ value to be above the threshold (of 4). For these odd triggers,
the L1 counterpart to the L1-H1 pair had a very low SNR, below threshold.
Consequently, a coincidence near the time of the injection was found, but
the incorrect template was identified (causing the large χ2 value).
Calculating both a ρ and χ2 value for each trigger will enable the ranking
of each trigger to determine it’s significance.

5.5. BEHAVIOUR IN NON-GAUSSIAN DATA 107
(a)
(b)
Figure 5.6: The distribution of χ2 values as a function of SNR ρ for detectorH1 (the distribution for L1, not shown, is similar). The black crosses repre-sent triggers from the non-injection run. The red crosses represent triggersfrom the injections runs that occurred within a 9 second window of an injec-tion, and were coincident in with a trigger from L1. The upper plot 5.6a isthe distribution of triggers in S5 (non-Gaussian) data, and the bottom plot5.6b is for Gaussian noise.

108 CHAPTER 5. OFFLINE SPIIR PIPELINE
5.6 Ranking triggers
Each of the 189 instances of gstlal iir inspiral produced a separate co-
incident trigger database. For each trigger in each database, we need to de-
termine their significance by using a “ranking” statistic. By histogramming
the likelihood ratios of individual triggers that occurred in signal-free data,
and modelling the coincidence procedure, the pipeline is able to transform
the likelihood ratio for a multi-detector coincidence into a false-alarm proba-
bility (FAP). Knowing the livetime of the analysis (roughly two weeks), and
assuming that the triggers due to noise are the result of a Poisson process,
the FAP was converted to a false alarm rate (FAR, in units of Hz). The
FAR is the primary quantity used in determining the significance of each
trigger. Ultimately, we will only consider a coincident trigger a candidate for
follow-up if it has a FAR less than a given threshold FAR∗.
The background FAR distribution in other inspiral search pipelines is
typically estimated by repeating the coincidence test after shifting in time
single detector triggers relative to each other. Typically 100 time slides are
applied, resulting in 100 independent trials. Triggers from these trials are
called time-slide coincident triggers, as opposed to zero-lag coincident trig-
gers where no time slide has been applied. If the time shift is longer than
the light travel time between detectors, any coincident triggers found must
necessarily be a false alarms. Due to the computational overhead, this pro-
cedure has traditionally been performed offline. In an online configuration,
this would require excess computation that could be used elsewhere. In or-
der to calculate the FAR without performing many time slides, we use the
procedure outlined in [142], which was specifically developed for low-latency
online inspiral searches. This method relies on first determining the likeli-
hood that a trigger from detector i with a measured ρi and χ2i values and
intrinsic parameters θ occurred due to noise alone (i.e. the definition of a
false alarm), which is given by the standard likelihood ratio,
L(ρ1, χ21, . . . ρD, χ
2D, θ) =
P (ρ1, χ21, . . . ρD, χ
2D, θ|s)
P (ρ1, χ21, . . . ρD, χ
2D, θ|n)
≈D∏i
Li(ρi, χ2i , θ). (5.1)

5.6. RANKING TRIGGERS 109
Here P (. . . |s) is the probability of observing (. . . ) given a signal, and P (. . . |n)
is the probability of observing (. . . ) given noise. In the second equality the
simplification that the likelihood ratio is a product of the individual detector
likelihood ratios has been introduced. This is valid in the case that the signal
and noise distribution in each detector are independent.
The probability of a coincident trigger having a likelihood value L in the
presence of noise only is the false alarm probability, P (L|n). However over
the course of the analysis, there are likely to be many independent coincident
triggers with a certain likelihood value. Ultimately, we are interested in the
probability of getting at least one coincident trigger with L > L∗ (P (L∗|n) =
P (L > L∗|n)) after M independent coincident triggers are found. This is
given by the complement of the binomial distribution,
P (L∗|n1, . . . , nM) = 1− (1− P (L∗|n))M . (5.2)
The FAP (5.2) can be converted to a FAR by assuming that false alarms
occur as a Poisson process. Strictly speaking, the triggers produced by our
pipeline are limited to one trigger per 4 seconds for each template (as de-
scribed in Section 5.1). At an even shorter timescale, the frequency response
of each template filter limits the minimum interval between false alarms.
However the timescale of dead-time around each event multiplied by the
event rate is so small that it will have an insignificant effect on the event
distribution. Hence the background process is well modelled as a Poison pro-
cess. For a Poisson process with mean λ, the probability of observing N or
more events is,
P (N |λ) = 1− e−λN−1∑i=0
λi
i!. (5.3)
Setting N = 1 and equating this with the FAP (5.2), we see the mean number
of false alarms is,
λ(L∗) = − ln [1− P (L∗|n1, . . . , nM)] . (5.4)

110 CHAPTER 5. OFFLINE SPIIR PIPELINE
To convert this to a FAR we simply need to divide by the livetime of the
run T ,
FAR = λ/T. (5.5)
The numerator of the likelihood ratio (5.1) is evaluated by assuming that
signals follow their theoretical distribution in Gaussian noise. This is a rea-
sonable assumption since detections of real signals are likely to come from
times of relatively stationary Gaussian noise. The denominator of (5.1) is
found by histogramming single-detector triggers that were not found in coin-
cidence. In practise, this means that a catalogue of non-coincident triggers,
sufficient to accurately estimate the likelihood ratio, must be recorded before
any FAP or FAR values can be assigned. As mentioned, running instances
of gstlal iir inspiral is only one part of the offline SPIIR pipeline.
5.7 The offline SPIIR pipeline
In Section 5.2 we described that for each run there were 63 time segments,
and 3 separate bank sets (Section 5.3). Hence in total, there were 189 in-
stances of gstlal iir inspiral for each run, each producing a database of
triggers. To calculate the FAR for each trigger as described in the previous
section a series of operations must be performed on the 189 databases. Figure
5.7 schematically outlines the post-gstlal iir inspiral procedure, which
calculates the likelihood ratio, FAP and FAR of each trigger, and reduces
the 189 databases to a single database of triggers. This constitutes the entire
offline inspiral search pipeline.
For every instance of gstlal iir inspiral the non-coincident trigger
SNR ρi and χ2i values were recorded. As described in Section 5.6, this infor-
mation was used to build a background distribution of probabilities which
gives the denominator of (5.1). The numerator of (5.1) was found by assum-
ing signals follow a theoretical distribution in Gaussian noise — which we
believe to be valid as we expect signals to only be observed when the noise
is relatively stationary and Gaussian. The likelihood ratio of each trigger for

5.7. THE OFFLINE SPIIR PIPELINE 111
Bank set 1(template banks 1-5)
Triggers from time segment 1
...
Calculate likelihoods
Cluster database
Merge databases
CalculateFAR
Write triggersto database
Triggers from time segment 63
Cluster database
...
...
...
...
Marginalise likelihoodover parameter space
Cluster database
Merge databases
Cluster database
Bank set 2(template banks 6-10)
Triggers from time segment 1
...
Calculate likelihoods
Cluster database
Merge databases
Triggers from time segment 63
Cluster database
...
...
...
...
Cluster database
Bank set 3(template banks 11-13)
Triggers from time segment 1
...
Calculate likelihoods
Cluster database
Merge databases
Triggers from time segment 63
Cluster database
...
...
...
...
Cluster database
Figure 5.7: The post-gstlal iir inspiral procedure. The 189 triggerdatabases from gstlal iir inspiral are distilled down to a single trig-ger database that contains triggers ranked by FAR. See text for detailedexplanation.
each time segment and bank set is then assigned.
For each of the 189 trigger databases, it is highly likely that many coinci-
dent triggers are correlated across both time and intrinsic parameter space.
In order to reduce the amount of data, a cut is made on coincident trig-
gers. This process is known as “clustering”. Coincident triggers that are
within 4 seconds of other coincident triggers with higher SNR values are
deleted from the database. This means at most there is one trigger every
four seconds. This significantly reduces the amount of triggers in the origi-
nal databases. Databases from different time segments within the same bank

112 CHAPTER 5. OFFLINE SPIIR PIPELINE
set are then merged together, and the clustering applied again. The three
resulting databases from each bank set are then merged to a single database
and the clustering cut is performed a final time.
The final trigger database, along with the marginalised likelihood infor-
mation are sent to the FAR estimation code that assigns a FAP and FAR to
each coincident trigger.
At the end of the pipeline there is a single database that has a list of
coincident triggers which each contain a FAR. This will be the primary
detection statistic that will determine if a trigger is worthy of follow-up. We
perform the entire search pipeline both with and without injections.
5.8 Confirmation of false alarm rate estima-
tion
For the non-injection run, we confirmed that the false alarm rate estimation
code was working as expected by plotting the cumulative number of false
alarms as a function of inverse FAR (figure 5.8). Assuming that false alarms
are a Poisson process, one would expect the total number of false alarms less
than a given FAR (or greater than a given inverse FAR) to be the product
of the experiment duration (the livetime) and the FAR (see equation 5.5).
For example, for the two week (14 day) run we expect to have on average 14
false alarms with a FAR less than one per day.
In addition to the zero-lag coincident triggers, we also applied a single
5 second time slide to the L1 individual detector triggers before coincidence
with H1 individual detector triggers was made. This time period was longer
than the light travel time between the two detectors meaning that any trig-
gers found in coincidence must necessarily be due to noise alone and not gen-
uine GW events. Both the zero-lag and time-slide distributions are shown
in figure 5.8). Both follow a Poisson distribution to within 1σ variation. We
believe this confirms the ability of the FAR estimation code.

5.9. SENSITIVITY OF SEARCH 113
105 106 107 108
Inverse False-Alarm Rate (s)
100
101
102
Num
bero
fCoi
ncid
entT
rigge
rs
Time-slideZero-lag〈N〉±√N
±2√N
±3√N
±4√N
±5√N
Figure 5.8: The number of coincident triggers less than a given false alarmrate, or greater than a given inverse false alarm rate is shown. The bluetrace is for the non-injection run without any time slide applied (zero-lag),and the black trace is for the non-injection run with a 5 second time slideapplied. The expected number of events assuming a Poisson distribution offalse alarms is given as the product of the livetime (∼ two weeks) and theFAR. This is what the dashed line shows. The shaded regions show the 1, 2,3, 4, and 5σ variance given by a Poisson distribution of false alarms.
5.9 Sensitivity of search
We quantify the sensitivity of our pipeline to recover injections by measuring
the detection efficiency ε. The detection efficiency is defined as the ratio of
found injections (Nf ) to total injections (Nt) at a given distance D.
Over the period of the two week injection runs, our pipeline produced
many coincident triggers that were within valid time segments. In order to as-
sociate these possible recoveries with the injected simulations, we ran the co-
incident trigger database through the LAL application ligolw inspinjfind.
This application associates coincident triggers to injected simulations that
happened within a 9 second time window. No other coincidence test was
performed (such as a mass coincidence or amplitude consistency check). If a

114 CHAPTER 5. OFFLINE SPIIR PIPELINE
coincident trigger that was associated with an injection had a FAR less than
a given threshold FAR∗, we declared that the pipeline found it. Hence the
detection efficiency ε of our pipeline is a function of distance D and FAR∗,
ε(FAR∗, D) =Nf (FAR∗, D)
Nt(D). (5.6)
We can compare our measured detection efficiency to a detection efficiency
that would be obtained using the optimal matched filter and assuming that
the noise in the data is Gaussian. An optimal matched filter would recover all
injections with an SNR above a given threshold ρ∗. The strength of a signal
in Gaussian noise can be obtained from equation 2.98. This value can be ob-
tained by inserting the known injection signal parameters θ, ϕ, ψ, ι,D,m1,m2
and the detector’s noise PSD Sn(f) at the time of the injection tc,
ρ =1
D
√√√√2(F 2
+ (1 + cos2 ι)2 /4 + F 2× (cos ι)2) ∫ ∞
−∞
∣∣∣hc(f ;m1,m2)∣∣∣2
Sn(|f |) df, (5.7)
where the detector antenna response functions F+ and F× are functions of sky
location (θ, ϕ) and polarisation angle ψ. An injection in Gaussian noise would
be recovered from an optimal matched filter if it has an SNR (5.7) above a
given threshold ρ∗ in both detectors. Since all of our injections have masses
close to the canonical 1.4M–1.4M waveform, and the extrinsic parameters
are known, the number of injections recovered above ρ∗ in each detector
assuming Gaussian noise can be determined completely independently of the
SPIIR pipeline by measuring the PSD at the time of the injection.
We have plotted the SPIIR pipeline’s detection efficiency and the de-
tection efficiency obtained from a matched filter in Gaussian noise in figure
5.9. The measured detection efficiency will depend on the chosen FAR∗, and
Gaussian noise detection efficiency on ρ∗. For realistic searches, a high level
of confidence will be required to declare that a trigger was due to a real
inspiral GW event and not noise. The five sigma confidence level generally
relates to a FAR threshold of 3×10−13 Hz (∼ one per 105 years). A typically
quoted SNR value associated with this confidence level is 8 or above. Hence

5.9. SENSITIVITY OF SEARCH 115
as a comparison, we show the Gaussian noise detection efficiency by requiring
injected simulations to have an SNR ρ greater than 8 in each detector.
0 5 10 15 20 25 30 35 40
Distance (Mpc)
0.0
0.2
0.4
0.6
0.8
1.0
Effi
cien
cyε
FAR < 3× 10−13 HzGaussian noise (ρi > 8)
Figure 5.9: The detection efficiency of SPIIR pipeline for 54424 inspiralinjections with randomly chosen parameters. The solid blue curve representsthe SPIIR pipeline’s detection efficiency for trigger with a FAR < 3×10−13 Hz(∼ one per 105 years). Shown for comparison is the detection efficiencyobtained from an optimal matched filter assuming the signals were presentin Gaussian noise and recovered with a SNR of 8 or greater in each detector.
A useful quantity to compare the sensitivity of our pipeline to others is
the “sensitive volume”. The sensitive volume Vs is defined as the efficiency
weighted volume integral,
Vs(FAR∗) =
∫ ∞0
4πD2ε(FAR∗, D) dD. (5.8)
We show the sensitive volume of our pipeline in figure 5.10, along with the
volume obtained by the Gaussian noise detection efficiency (for an SNR >8 in
each detector). Multiplying the sensitive volume by the true coalescence rate
R (in units of events per unit volume per unit time) will give the expected
detection rate N (events per unit time) of the pipeline.

116 CHAPTER 5. OFFLINE SPIIR PIPELINE
10−12 10−11 10−10 10−9 10−8 10−7
FAR∗ (Hz)
5000
6000
7000
8000
9000
10000
11000
12000
13000S
ensi
tive
Volu
meV
s(M
pc3)
measuredGaussian noise (ρi > 8)
∼ 105 yrs ∼ 104 yrs ∼ 103 yrs ∼ 102 yrs ∼ 10 yrs ∼ 1 yrs ∼ 1 mth
Figure 5.10: The sensitive volume of the SPIIR pipeline is shown as a functionof FAR∗ (and inverse FAR along the top axis). The volume is the efficiencyweighted distance integral given in Eq (5.8). The red bar is the sensitivevolume obtained by a detection efficiency assuming signals were present inGaussian noise and the optimal matched filter gave an SNR greater than 8.
Another way to compare the sensitivity of our pipeline to other NS-NS
inspiral searches is to measure the “sensitive range” rs. The sensitive range
is the radius which would give a sphere with volume equal to the “sensitive
volume” (Vs = 4πr3s/3). The sensitive range can be directly compared to
the “SenseMon” range commonly found in GW detector sensitivity papers
[143, 144, 145]. The SenseMon range is the estimated distance at which an
interferometer is sensitive to a volume of homogeneously distributed 1.4M–
1.4M inspiral sources averaged over all possible sky positions and orienta-
tions, with a minimum SNR of 8. The published SenseMon range for both
H1 and L1 over the entire S5 run was around 15 Mpc. However this value
is highly dependent on the properties of the noise PSD at the time of the
injection. We estimate our own SenseMon range by inverting the theoretical
detection efficiency weighted volume integral for signals with an SNR greater
than 8 (in each detector). This gives an expected range of ∼ 11.7 Mpc, which

5.10. PARAMETER ESTIMATION 117
is plotted in figure 5.11. Our pipeline obtains an equivalent range for a FAR∗
of 2× 10−11 Hz (∼ one per 1600 years).
10−12 10−11 10−10 10−9 10−8 10−7
FAR∗ (Hz)
10.5
11.0
11.5
12.0
12.5
13.0
13.5
14.0
14.5
Sen
sitiv
eR
ange
r s(M
pc)
measuredGaussian noise (ρi > 8)
∼ 105 yrs ∼ 104 yrs ∼ 103 yrs ∼ 102 yrs ∼ 10 yrs ∼ 1 yrs ∼ 1 mth
Figure 5.11: The sensitive range of the SPIIR pipeline is shown as a functionof FAR∗(and inverse FAR along the top axis). The range is the distance whichwould give a sphere of volume equal to the sensitive volume (fig 5.10). Thered bar is the sensitive volume obtained by a detection efficiency assumingsignals were present in Gaussian noise and the optimal matched filter gavean SNR greater than 8.
5.10 Parameter Estimation
A final step in validating the SPIIR pipeline is to make sure that the recovered
signals estimated the injected simulation parameters within an acceptable
error bound. We are only interested in showing that the SPIIR pipeline can
reasonably estimate the parameters, as the design goal of the pipeline is to
send triggers for EM follow-up with low-latency.
When using a discrete template bank to search for real GW signals that
may have any parameters, the template that gives the highest SNR will be
chosen. For a given signal with fixed parameters, different noise realisations

118 CHAPTER 5. OFFLINE SPIIR PIPELINE
may cause the SNR to change, and hence a different template to be chosen.
If the SNR is high enough, the error in the measured parameters will have a
Gaussian distribution centred around the actual value [146]. This error can
be measured from the covariance matrix, which is the inverse of the Fisher
information matrix of the parameters θ. In practise, the actual error is also
related to the strength of the signal, however to confidently claim detection
of a signal would require a sufficiently high SNR, so this is a reasonable
estimate [146].
The only parameters we are concerned with in this low-latency pipeline
are the intrinsic mass parameters and time of arrival. For the former, we
considered the fractional accuracy in chirp mass defined as,
∆MM =
Mrecovered −Minjected
Minjected
. (5.9)
In [146], the authors estimate the error in ∆M/M to be 0.0383% for 3.5PN
templates for signals with an SNR of 10. They arrive at this value using
a theoretical initial LIGO noise curve, and assume signals have an SNR of
10. Figure 5.12 shows the distribution of measured fractional accuracy of
recovered injections that have a FAR less than 3 × 10−7 Hz (approximately
one per month, since we would not expect any false alarm trigger with a FAR
less than this value within the two week run), and a SNR in both detectors
of around 10 for the Gaussian injection runs. We observed that there was
a slight bias of approximately 1.5%, but the distribution otherwise mostly
matched. This bias is most likely caused by a mismatch in templates searched
for. The templates searched for were 2PN, whilst the injections were 3.5PN.
Although we are not too concerned with parameter estimation for this
pipeline, we must provide astronomers with accurate information for sky
localisation of the GW signal’s source. Generally sky localisation is based
on timing differences obtained from n different non-co-located detectors. For
two non-co-located detectors, the timing differences yield an annulus on the
sky of possible origins. Additional information, such as signal amplitude,
can reduce the annulus to localised regions, however the errors can remain

5.10. PARAMETER ESTIMATION 119
−0.001 0.000 0.001 0.002 0.003 0.004 0.005
Fractional Accuracy (∆M/M)
0
200
400
600
800
1000
1200
Nor
mal
ised
ExpectedMeasured
Figure 5.12: The fractional chirp mass accuracy ∆M/M distribution ofrecovered injections with a FAR < 3×10−7 Hz and an SNR of around 10. Thered dashed line shows the expected distribution (see text). Our distributionhas a similar uncertainty, with a bias of ∼1.5%. This is likely due to theincorrect PN order templates searched for.
as large as hundreds to thousands of square degrees. For more precise sky
localisations, more non-co-located detectors are needed.
The most important quantity to be accurately estimated in this respect
is the difference between the time of arrival of the signal ti at each detector i.
Since the error on the sky is a function of arrival time differences, we measure
the timing accuracy as,
δt = (trecoveredL1 − trecovered
H1 )− (tinjectedL1 − tinjected
H1 ). (5.10)
In [146], the expected error in measuring the time of arrival for each detector
is estimated to be 0.476 ms for 3.5PN templates with an SNR of 10. Since
we expect the noise from the two detectors to be independent, the expected
timing accuracy error (5.10) is this value added in quadrature, ∼0.673 ms.
Figure 5.13 shows the distribution of δt from recovered injections with a

120 CHAPTER 5. OFFLINE SPIIR PIPELINE
FAR < 3× 10−7 Hz and an SNR of around 10 in both detectors. We see that
it follows the expected distribution.
−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0
Timing Accuracy δt (ms)
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Nor
mal
ised
Expected σ = 0.673Measured
Figure 5.13: Timing accuracy δt distribution of SPIIR pipeline for injectionswith a FAR < 3 × 10−7 Hz and an SNR of around 10 in both detectors.This follows the expected distribution (see text for explanation) closely. Theroughness of the normalised pdf is most likely due to the finite number ofinjections.
5.11 Discussion
In this chapter we have realised the SPIIR method in the form of an exe-
cutable application, gstlal iir inspiral. This application was built into
part of the larger GW data analysis software project, LAL, and is avail-
able to other scientists in the community. We have tested the ability of the
SPIIR method to operate in real, non-Gaussian detector data by running this
application as part of a search for low-mass NS-NS inspiral signals in approx-
imately two weeks of historically recorded S5 data. As we were limited by
available computer resources, we chose to search over a rather small param-
eter space, 1.1M–1.7M component masses, which gave us 1248 templates

5.11. DISCUSSION 121
with a minimal mismatch of 3%. Using the IIR filter coefficient design de-
scribed in 3.2.5, we created a bank of IIR templates that approximate the
2PN templates to greater than 98.6%.
We ran the SPIIR pipeline in both non-Gaussian S5 data and Gaussian
noise generated from the initial LIGO design curve. Figure 5.6 shows the ρ-χ2
distribution for the single detector triggers. Single detector triggers that are
due to noise transients, known as glitches, are immediately distinguishable
from those caused by injections. This proves that the SPIIR pipeline is
capable of running on non-Gaussian data.
We have chosen to determine the significance of each coincident trigger
produced by the SPIIR pipeline by false alarm rate (FAR). Our method of
estimating the FAR differs from other search inspiral pipelines that take many
time slides. We have purposely chosen not to do this, as taking multiple time
slides won’t be feasible in an online environment. The new FAR estimation
code has been verified by showing that coincident triggers obtained from a
single time slide follow a Poisson distribution (figure 5.8).
The SPIIR pipeline’s sensitivity was determined by calculating the de-
tection efficiency, the sensitive volume and the sensitive range. By injecting
many simulations into the data with a uniform distribution of signal param-
eters we were able to count the number of injections found as a function of
distance and FAR∗. The detection efficiency curve (Fig 5.9) is shown for
a minimum FAR∗ of 3 × 10−13 Hz (∼ one per 105 years). In lieu of com-
paring this sensitivity directly with other inspiral pipelines, which can be
difficult due to different search conditions, we have chosen to compare it to
an efficiency curve obtained by requiring the SNR (Eq 5.7) found by an op-
timal matched filter to be greater than 8 in each detector. This method is
completely independent of the SPIIR method, as it depends solely on the
injection parameters and the noise PSD at the time of each injection. As
Figure 5.9 shows, at an efficiency of 50%, the distance is reduced by about
10% compared to the same theoretical maximum efficiency assuming Gaus-
sian noise. The sensitive volume (Fig 5.10) for detection requiring a five
sigma confidence level is about 25% of the Gaussian noise sensitive volume.
This is consistent with other low-mass inspiral search pipelines, such as [147],

122 CHAPTER 5. OFFLINE SPIIR PIPELINE
although the conditions of their search were different from ours. However it
is also important to point out that the sensitivity in non-stationary noise is
influenced by techniques independent to the choice of filtering engine, such
as χ2-tests, other vetoes, coincidence tests, ranking statistics, etc.
By taking the efficiency weighted volume integral, we found the sensitive
volume as a function of FAR∗. By multiplying this volume by the true
coalescence rate, expected to be 10−8 − 10−6 events per Mpc3 per year [29],
we can calculate a detection rate (in units of events per year) of our pipeline.
The radius at which gives a sphere equal to the sensitive volume is known as
the sensitive range. This range can be compared to the “SenseMon” range
reported in GW detector sensitivity papers. Since the sensitivity depends
strongly on the non-stationary noise in the interferometer, we calculated
our own SenseMon range by inverting the sensitive volume (5.8) based on
a minimum SNR of 8 in each detector. This range was ∼11.7 Mpc. To
obtain an equivalent sensitive range in our pipeline, we would be looking for
coincident triggers with a FAR less than 2×10−11 Hz (∼ one per 1600 years).
It was important to show that the SPIIR pipeline could provide reasonable
parameter estimation of GW triggers for follow-up. Although our search
mass range was very small, our pipeline recovered the chirp mass parameter
to within the theoretical limit 5.12. Perhaps more importantly, the time of
arrival difference between detectors was considered. This too seems to follow
an expected distribution 5.13. This implies that the localisation error of this
method will be no worse than any other inspiral method.
The SPIIR method has been implemented and tested in an offline pipeline.
The pipeline can handle non-Gaussian detector data, can recover injections
with a detection efficiency close to the ideal amount, and can estimate the
template parameters within a reasonable amount. We believe we are in good
shape to scale up to the next stage, a test of the SPIIR pipeline on online,
live detector data.

Chapter 6
Online SPIIR pipeline
In this chapter we will discuss the implementation and execution of the SPIIR
pipeline in an online environment, as opposed to the offline environment dis-
cussed in the previous chapter. The very core of the SPIIR pipeline remains
the same — only the way the input to the pipeline (the data source) and the
output of the pipeline (the candidate coincident triggers for follow-up) are
handled have changed.
The Advanced detectors are expected go online between 2015 and 2020
with ever-increasing sensitivity [148]. As both the LIGO and Virgo detectors
are currently in the process of being upgraded to their advanced configuration
state, there is currently no online strain data to analyse. For this reason,
the LIGO scientific collaboration has organised a series of engineering runs,
designed to provide the collaboration with a realistic environment in which to
test and develop infrastructure that will be used in the advanced detector era.
LIGO’s second engineering run, dubbed ER2, occurred over three weeks from
18 July, 2012 to 8 August, 2012. During this run, re-coloured S6 data was
broadcast from the detector sites in real-time as though the detectors were
online. This gave us the opportunity to use real S6 like data in a real-time,
online environment. No S6 data by itself was used in this thesis. Simulated
gravitational wave signal injections were made at a realistic astrophysical
rate, with parameters unknown to data analysts ahead of time. This provided
an ideal situation for us to test the SPIIR pipeline on live, streaming detector
123

124 CHAPTER 6. ONLINE SPIIR PIPELINE
data. Our pipeline found many coincident triggers with low false alarm rates
and automatically submitted event information to the online listening service
called Gravitational-wave Candidate Event Database (GraCEDb) for further
follow-up (sky localisation, astronomical alerts, etc).
We participated in the ER2 experiment alongside other low-mass inspiral
search pipelines. However it is worth pointing out that our goal of operating
the SPIIR pipeline in ER2 was to implement the pipeline in a realistic setting
and identify possible future improvements, and not to directly compete with
other pipelines. Hence making direct comparisons with other inspiral search
pipelines can be difficult, as different pipelines may have different motiva-
tions. Additionally, different configurations of the same pipeline can alter
the design goals; level of latency, total computational resources, etc. Our
result in this chapter is not a final determination of the SPIIR pipeline ca-
pabilities, but rather a proof that the SPIIR method can work in a online
environment.
We begin this chapter by describing the relatively minor changes made
to the offline program gstlal iir inspiral to transform it into
gstlal iir ll inspiral— an implementation of the SPIIR method capa-
ble of reading online strain data, calculating the FAR of coincident triggers,
and sending low FAR triggers to the GraCEDb service in real-time and with
low-latency. Details of GraCEDb will be described in 6.1.1. The purpose
and goals of LIGO’s second engineering run, ER2, as well as the real-time
data distribution plan will be outlined in Section 6.2. We describe the oper-
ating procedure of the SPIIR pipeline we have designed to run on ER2 data
in Section 6.3, and the chosen parameter space for this run in Section 6.4.
Results of our ER2 search will be given in Section 6.5, and details of the
simulated inspiral injections placed in the strain data throughout ER2, in-
cluding whether or not our pipeline found them, will be discussed in Section
6.6. Finally, in Section 6.7 we will discuss the weak and strong points learnt
from this analysis on live engineering run data, and suggest how the pipeline
can be improved in future analyses.

6.1. SPIIR ONLINE PIPELINE 125
6.1 SPIIR online pipeline
In this section we will describe the application gstlal iir ll inspiral,
which is a modification of the gstlal iir inspiral application described
in the previous chapter (c.f. Section 5.1), designed to submit triggers from
live, online data. The core of the gstlal iir ll inspiral where the whiten-
ing, SPIIR filtering, triggering and coincident tests take place, is identical
to gstlal iir inspiral — only the way the input and output are handled is
different. A key difference is that upon execution, the gstlal iir ll inspiral
application looks for the latest available gravitational wave frame data from
a shared memory location on the machine running the application, and will
continue running indefinitely. The other major difference is that the FAR
of coincident triggers must be calculated immediately after it is found. This
section will describe in detail the flow of data through the application, as is
schematically shown in Fig 6.1.
After execution, the gstlal iir ll inspiral application reads the most
recent gravitational wave frame file from a shared memory location. Both the
strain data and a data quality vector are de-multiplexed from the frame data,
and packaged into regular GStreamer buffers (each buffer has a timestamp,
duration, sample rate, etc). The data quality vector contains information
about the state of detectors and other environmental factors that may oth-
erwise affect the veracity of signals found in the data. For our analysis, we
required that the data quality have the following conditions:
• The data must be flagged as being in science mode1, the interferometer
must be in lock, and the strain data itself, h(t) must be available.
• There must not be any burst injections and there must not be any
other reasons to believe that the data is not analysable (such as other
experimental work on site or environmental factors impacting on the
operation of interferometers).
If these conditions are met, the strain data buffer is passed onwards. Oth-
erwise it is flagged as a gap buffer and passed on. A gap buffer is a regular
1discussed in Section 5.1

126 CHAPTER 6. ONLINE SPIIR PIPELINE
buffer with a timestamp and a duration, but it has been flagged as having no
valid data. This is done to preserve a continuous flow of buffers throughout
the application.
The strain data buffer is then passed to the whitener element, as described
in Section 5.1. During the execution of gstlal iir ll inspiral, no initial
PSD is provided to the whitener element for which to initially estimate the
noise PSD. Hence some time is required after program execution for the
internal PSD to be correctly estimated.
The buffer is then passed on to the SPIIR element which operates as
described in Section 5.1. If the SPIIR element receives a gap buffer, it con-
siders the data in the buffer as zeros, and filters it. In this respect, there
were wasted computer cycles, but there was also a synchronous flow of data.
As in the offline run, our pipeline employs multiple SPIIR elements to pro-
cess separate template banks covering different parts of the parameter space
simultaneously (the specific banks used for the online run will be discussed
in section 6.4).
After the SPIIR element, the filtered buffer has 2×M channels (where M
is the number of templates). This buffer is sent to the triggering element. As
described in Section 5.1, the triggering element looks for peaks in absolute
SNR above a given threshold within a fixed time window. If there is a peak
above this threshold, then the χ2 value is calculated, and the ρ and χ2 values,
along with the trigger information (masses, time, etc), are passed along. For
this online study, we have chosen a SNR threshold of 4, and a 4 second time
window.
A time coincidence test is then performed for triggers between detectors.
A trigger is considered coincident between detectors if it occurs within 20
milliseconds for exactly the same template. If coincidence between two or
more detectors does not occur, the non-coincident trigger ρi and χ2i values for
the ith detector are recorded to memory for use in the background calculation
(see Section 5.6). The background probability distributions P (ρi, χ2i |n) (for
each detector i) and a table of independent trials are periodically (every hour
or so) written to memory. If there is a coincident trigger, the FAP (Eq (5.2))
is estimated from the likelihood probability P (L∗|n) where the likelihood L

6.1. SPIIR ONLINE PIPELINE 127
has been marginalised over all detectors and intrinsic parameter space θ.
This probability distribution is supplied to gstlal iir ll inspiral via an
external file (how this works will be described in Section 6.3). The FAR
of the coincident trigger is calculated as the quotient of the FAP and the
livetime of the experiment to date (see Eq (5.5)).
If the FAR of the coincident trigger is less than the a given threshold FAR∗
it is considered a candidate worthy of follow-up. The trigger information
(component masses, state of detector PSDs, time of arrival, etc) is passed on
to GraCEDb for further follow-up.
6.1.1 GraCEDb
The Gravitational-wave Candidate Event Database, GraCEDb, is a proto-
type online service designed to coordinate and centralise candidate events
from GW events (not just those from inspiral sources). This environment
provides a central platform from which to receive GW data analysis prod-
ucts and digest the information. Localisation routines and alerts for the most
interesting (and likely) GW candidates can be automatically generated. In
essence, it is a prototype interface between internal GW scientists and exter-
nal astronomers and other interested parties.
Within gstlal iir ll inspiral a client process is started whenever a
trigger below the provided FAR threshold is found. The event information
(template parameters, time of signal arrival, noise PSD of the detectors, etc)
is sent via the client to the GraCEDb server. When GraCEDb receives the
event information, a unique identification code is assigned in the database,
and a webpage storing the event information is made (the format of which
is dependent on the type of analysis).
Submitting events to the GraCEDb server formed the final stage of our
pipeline. The trigger latencies, discussed in Section 6.5, are defined as the
difference between the GraCEDb submission time, and the measured time of
arrival of the signal.

128 CHAPTER 6. ONLINE SPIIR PIPELINE
Template M
yes no
Apply SPIIR methodfor each template
...
Does SNR goabove threshold?
IIR templatebank file(s)
Calculate statistic
Detector 1
Template 1
yes
Whiten data
Store ,
*
Create gap buffer
Is thissegment of good
quality?
Create buffer
Is trigger coincident between
detectors?yes no
Mark as coincident Mark non-coincident
Does SNR goabove threshold?
Calculate statistic
yes
...
...
...
...
... ...
Read frame filefrom memory
De-multiplex
DQ vector Strain
Marginalisedlikelihood file
Compute FAR
Is trigger FARbelow threshold?
yes
Send event informationto graCEDb
yes no
Apply SPIIR methodfor each template
Detector n
Whiten data
*
Create gap buffer
Is thissegment of good
quality?
Create buffer
Read frame filefrom memory
De-multiplex
DQ vector Strain
Figure 6.1: Flow chart describing the flow of data from top to bottom throughthe (online) SPIIR pipeline program gstlal iir ll inspiral.

6.2. LIGO’S SECOND ENGINEERING RUN 129
6.2 LIGO’s second engineering run
Whilst LIGO and Virgo are undergoing a major upgrade to the advanced
configuration state, there has been a planned series of engineering runs de-
signed to prepare the collaboration for the era of advanced detectors. The
engineering runs provide a realistic environment from which to test GW data
analysis pipelines designed for the advanced detector era. The goals are to:
• Assist the development during construction and commissioning of the
instrument,
• Determine how to integrate GW data analysis with detector character-
isation and instruments during project planning,
• Provide an environment to develop the actual infrastructure of data
acquisition, online characterisation, instrument calibration and low-
latency transfer,
• Give an opportunity for data analysts to provide feedback to the in-
strument designers.
The run had a soft start beginning 11 July, 2012, but did not officially
start until 18 July, 2012, and went until 8 August, 2012. Mock frames con-
taining strain data were created ahead of time by re-colouring S6 strain data
for the LIGO detectors and VSR3 strain data for the Virgo detector. The
re-colouring process used the noise PSD curve based on the zero-detuning of
the signal recycling mirror and high laser power configuration [149] for the
Advanced LIGO detectors, and the design curve [47] for the Advanced Virgo
detector. However, half way through ER2 the mock strain data from L1 was
switched over to re-coloured Power Stabilised Laser (PSL) output. This was
designed to incorporate online subsystems and facilitate feedback between
data analysts and engineers.
Throughout the run, the data was broadcast live and in real-time from
the two LIGO detector sites: Livingston, Louisiana (L1) and Hanford, Wash-
ington (H1), and from the Virgo detector site located in Cascina, Italy (V1).

130 CHAPTER 6. ONLINE SPIIR PIPELINE
The broadcast was received by computers at the California Institute of Tech-
nology (CIT) located in Pasadena, California and the Virgo site in Cascina.
The head node of the CIT computer cluster transferred the data to the shared
memory of all the nodes in the cluster. This provided the optimal environ-
ment in which to test the SPIIR pipeline in an online configuration. Figure
6.2 shows the data distribution network.

6.2. LIGO’S SECOND ENGINEERING RUN 131
CIT
Pasadena,
California
Head node
(switch)
Node 1(shared memory)
TCP/IP
...
LHO
Hanford,
Washington
Re-coloured
S6 H1 Strain
Data
DMT
process
(package
gwf file)
H1 V1L1
Node 2(shared memory)
H1 V1L1
Node n(shared memory)
H1 V1L1
TCP/IP
TC
P/IP
LHO
Livingston,
Louisiana
Re-coloured
S6 L1 Strain
Data
DMT
process
(package
gwf file)
Virgo
Cascina,
Italy
Re-coloured
S6 V1 Strain
Data
DMT
process
(package
gwf file)
Broadcast in realtime
Figure 6.2: Data distribution topology of the ER2 run. S6 strain data wasre-coloured at the sites LIGO Hanford observatory (LHO), LIGO Livingstonobservatory (LLO) and Cascina for H1, L1 and V1 respectively. The datawas sent to local Data Monitoring Tool (DMT) processes, which packagedthe data into 4 second gravitational frame files and broadcast the data overTCP/IP in real-time. This data was received at a head node at CIT inPasadena (as well as computers at Cascina), and distributed over the localcluster network to the shared memory of multiple nodes.

132 CHAPTER 6. ONLINE SPIIR PIPELINE
6.3 Analysis setup
During the ER2, we were allocated 25 dedicated nodes on the CIT com-
puter cluster from which to run our online SPIIR pipeline. This enabled
us to run many instances of gstlal iir ll inspiral, each searching for
inspiral signals from different parts of the parameter space. Each instance
of gstlal iir ll inspiral across the cluster was scheduled and managed
by the Condor High Throughput Computing [150] workload management
system.
In the offline analysis we estimated the likelihood, FAP and FAR of each
trigger after collecting all triggers from the analysis period. The background
of many independent non-coincident triggers collected over the course of the
two-week offline run was used to to estimate the background probability
P (ρi, χ2i , θ|n) (the denominator of the likelihood ratio 5.1). However in our
online environment, the FAR estimation of each trigger must be made im-
mediately after a coincident trigger is found.
As discussed in Section 6.1, the FAP (5.2) of coincident triggers is esti-
mated within gstlal iir ll inspiral, immediately after the trigger has
been found. This is done by providing gstlal iir ll inspiral with a
marginalised likelihood file containing the probability P (L∗|n) where the
likelihood L has been marginalised over all detectors and intrinsic parameter
space θ. The marginalised likelihood file is updated periodically from the
most recent background probabilities by a separate application. We simul-
taneously had a script running on a separate node that would wait one hour
in between marginalising the likelihood from the 25 nodes running different
instances of gstlal iir ll inspiral (i.e. marginalise across intrinsic pa-
rameter space θ). This file was updated in place, meaning that each instance
of gstlal iir ll inspiral always had access to the latest marginalised like-
lihood file from which to estimate the FAP and FAR of each trigger. In this
respect the pipeline needed to be run for some time to collect a background
of independent trials from which to create the likelihood statistics.
Figure 6.3 shows the dependence of the multiple applications across the
nodes.

6.4. ER2 SEARCH PARAMETER SPACE 133
Job 1
marginalized
likelihood file
Marginalise
likelihoods over jobs
(runs every hour)
IIR template
banks 1,2SPIIR program
(always running)
Triggers sent
to graCEDb
...
...
...
IIR template
banks 3,4SPIIR program
(always running)
Triggers sent
to graCEDb
IIR template
bank 49SPIIR program
(always running)
Triggers sent
to graCEDb
Job 2
Job 25
Write
Write
2
Write
25
Figure 6.3: The 25 independent nodes on the CIT cluster each executean instance of gstlal iir ll inspiral. Each gstlal iir ll inspiral
reads a different IIR template bank(s) (in practise two banks each) and themarginalised likelihood file. Periodically (approximately once an hour) a sep-arate application on a different node is run which marginalises the likelihoodfrom the background probability P (ρi, χ
2i , θ|n) distributions across detectors
(i) and intrinsic parameter space θ. If a coincident trigger with a FARless than the provided threshold is found, it is sent to GraCEDb for furtherfollow-up.
6.4 ER2 search parameter space
The template banks used for this search were created using the same proce-
dure as outlined in Section 5.3, but using the zero de-tuning, high power nose
curve for Advanced LIGO [149] and the design curve for Advanced Virgo [47].
As we were limited by available computer resources, we restricted the
desired component mass range to be between 1.2Mand 1.475M. This
corresponds to a typical neutron star mass, and was a subset of the expected
injections (discussed in Section 6.6). Since the advanced detectors are sensi-
tive to signals with frequencies as low as 10 Hz, a properly placed template

134 CHAPTER 6. ONLINE SPIIR PIPELINE
bank will be more densely populated than the initial detector templates dis-
cussed in the previous chapter. By requiring a minimum mismatch of 3%
between templates and a starting frequency of 10 Hz, lalapps tmpltbank
produced 4865 templates. As in the offline case lalapps tmpltbank placed
some templates outside of the desired parameter space, as shown in Figure
6.4.
1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8
Component mass 1, m1 (M)
1.05
1.10
1.15
1.20
1.25
1.30
1.35
1.40
1.45
1.50
Com
pone
ntm
ass
2,m
2(M
)
(a)
2.3 2.4 2.5 2.6 2.7 2.8 2.9 3.0
Total mass, M (M)
0.238
0.240
0.242
0.244
0.246
0.248
0.250
Sym
met
ricm
ass
ratio
,η
(b)
Figure 6.4: The distribution of the 4865 templates for the online analysisis shown in both component mass (m1,m2) space (6.4a) and total mass -symmetric mass ratio space (6.4b). The target parameter space is shadedin grey. Although a smaller space than for the offline run (c.f. Fig 5.4),the parameter space for the online run is more densely sampled. Againlalapps tmpltbank placed some templates outside the target area. Also,it seems to overpopulate templates along the equal mass curve (m1 = m2,η = 1/4). The colours represent the 49 different split template banks thatmake up the full parameter space.
In order to make the best use of available resources (the 25 nodes), we
decided to split 4865 templates into banks of 100 templates each ordered
by chirp mass, giving us 48 banks with 100 templates and one template
bank with 65 templates. This meant that each gstlal iir ll inspiral
application would run at most two split template banks each.

6.4. ER2 SEARCH PARAMETER SPACE 135
Each split bank was then passed to the gstlal_iir_bank application,
along with a file containing each detector’s design PSD. This application
used the IIR coefficient generation algorithm described in Section 3.2.5 to
create an xml file containing the As, Bs and Ds matrices required by the
SPIIR element for each detector. The IIR tuning parameters α = 0.99,
β = 0.25 and ε = 0.03 used meant that each IIR template had a greater than
99% match to the 2PN waveform it was trying to approximate (see Figure
6.5).
750 780 810 840 870 900 930Number of IIR filters
0.990750
0.990775
0.990800
0.990825
0.990850
SN
Rov
erla
p
1.02 1.08 1.14 1.20 1.26Chirp massM (M)
750
780
810
840
870
900
930N
umbe
rofI
IRfil
ters
NIIR ∝M−5/6c
Figure 6.5: This series of plots show the SNR overlap of an IIR responsewith respect to its 2PN waveform, the total number of IIR filters a giventemplate, and the chirp mass. As compared to the offline case which was forinitial LIGO (5.5) we can see that there is a ∼ 3 fold increase in the numberof IIR filters NIIR.
Using a lower cut-off frequency of 10 Hz instead of 40 Hz meant that there

136 CHAPTER 6. ONLINE SPIIR PIPELINE
were around three times the number of IIR filters NIIR per template than for
the initial LIGO S5 run (see Eq (4.7)). However this added a small amount
of computational cost (around 10%), since the extra filters were run at low
sample rates of 32 and 64 Hz. Figure 6.6 shows the number of IIR filter as a
function of sample rate NIIR,s for each of the 49 split banks (distinguished by
colour) and the estimated computational cost (obtained from Eq 4.1). As we
can see, only the computational cost of the 32, 64 and some of 128 Hz filter
groups are additional to the offline case (this can be compared with table
4.1).

6.5. RESULTS OF SEARCH 137
32 64 128 256 512 1024 2048 40960
50
100
150
200
250
300
Num
bero
fIIR
filte
rs
32 64 128 256 512 1024 2048 4096Sample rate bin
0
10
20
30
40
50
60
70
80
90
Com
puta
tiona
lCos
t(M
FLO
PS
)
Figure 6.6: Number of IIR filters NIIR,s and computational cost Cs per samplerate, per split template bank. There are 49 banks, each represented by adifferently coloured column.
6.5 Results of search
Over the course of ER2 we were able to run the online SPIIR pipeline inter-
mittently. For each execution of gstlal iir ll inspiral, GraCEDb up-
loads were initially disabled by default so there was time for the background
probabilities to be estimated by collecting non-coincident triggers. The FAR
threshold could be manually changed dynamically by the user at any time
(once enough non-coincident events were found to reasonably estimated the

138 CHAPTER 6. ONLINE SPIIR PIPELINE
FAR). However, the time at which FAR threshold was manually changed
and its value was not recorded, making it difficult to tell post-analysis when
the pipeline could have been submitting events to GraCEDb.
Also, there were times when the broadcast of the data from the individual
detector sites to the CIT computer cluster was interrupted. During these
times, each instance of gstlal iir ll inspiral stored some data (several
minutes worth) from each detector in memory, then immediately went into
a paused state waiting for the eventual arrival of the data. Once the missing
data arrived at the CIT node’s shared memory, the application tried to first
clear the data in the stored in memory from all detectors, and then the
missing data. However since we had designed gstlal iir ll inspiral to
search the highest number of templates possible in real-time, there were
times when there were not enough extra computational resources to clear
the backlog (i.e. filter the offline data faster than real time). When this
happened the pipeline would either crash, or be indefinitely stuck processing
with a several minute latency, requiring a manual restart.
Those problems aside, we submitted 1994 events to GraCEDb between
the 20 July, 2012 (UTC) and the end of ER2, 17:00 8 August, 2012. Fig-
ure 6.7 shows the FAR of each event submitted to GraCEDb as a function of
event time (the calculated arrival time of the end of the signal). There are no
triggers below 3×10−13 Hz (one in 105 year event), suggesting that no events
were genuine signals. However there were several events with FAR less than
10−13 Hz, and were often submitted within a short period of time. We believe
that these were due to short-lived periods of non-stationary noise (glitches)
in the data. The whitener element within gstlal iir ll inspiral can ac-
curately track a slowly changing noise spectrum, but short lived glitches are
difficult to remove. Indeed, this is one of the reasons why a data quality
vector was used. Also, recall that the online pipeline had, unlike like the
offline pipeline, no clustering over time and parameter space2. This meant
that glitches could ring up in both mass space and time. For clarity, we
applied a 20 second window post-analysis to the 1994 submissions, retaining
2other than the internal 4 second time clustering per instance ofgstlal iir ll inspiral.

6.5. RESULTS OF SEARCH 139
only the lowest FAR events within the 20 second interval. A period of 20
seconds was chosen as it is not expected that glitches occur more often than
this. From this we found 193 clustered events (shown by red crosses in Figure
6.7). From this figure we can tell that the FAR threshold was set manually
to 10−5 Hz, 10−4 Hz or 10−3 Hz at different times.
20Ju
l21
Jul
22Ju
l23
Jul
24Ju
l25
Jul
26Ju
l27
Jul
28Ju
l29
Jul
30Ju
l31
Jul
01Au
g02
Aug
03Au
g04
Aug
05Au
g06
Aug
07Au
g08
Aug
Event time (UTC)
10−13
10−12
10−11
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
FAR
(Hz)
Unclustered (1994 events)Clustered (193 events)
Figure 6.7: The FAR of events that were submitted to GraCEDb as shown asa function of time (blue crosses). Although there was no logging mechanismto show what the GraCEDb FAR threshold was at a given time, we cansee that it was most likely 10−4 Hz, 10−3 Hz and at times 10−2 Hz. A largenumber of events were submitted close together in time, but with a FAR lessthan 10−13 Hz, suggesting that they were glitches in the data. We applieda 20 second window post-analysis, which reduced the number of clusteredevents to just 193 (red crosses). Shown in grey are times when there were atleast two detectors in science mode.
From Figure 6.7 we can tell that there were days when the analysis was
either not running, or the FAR threshold had not been set (e.g. 30 July, 2
August). However, without an adequate logging mechanism, it is difficult to
tell if the pipeline was not running at all, or the GraCEDb FAR threshold
was not set to a physical number, or there was an interruption in the data

140 CHAPTER 6. ONLINE SPIIR PIPELINE
broadcast, or there were less than two detectors operating.
An observation of the post-analysis clustered events reveals that the FAR
estimation takes time to collect enough statistics to accurately estimate the
FAR. Figure 6.8 show the number of clustered events per day that had a
FAR less than 10−4 Hz. On average, we would expect 8.64 events per day.
Also shown is the cumulative average. Considering that there were some
days when no events were submitted (most likely because the FAR threshold
had not been set), by the end of the run, the trigger rate was around two
thirds of the estimated amount.
20Ju
l21
Jul
22Ju
l23
Jul
24Ju
l25
Jul
26Ju
l27
Jul
28Ju
l29
Jul
30Ju
l31
Jul
01Au
g02
Aug
03Au
g04
Aug
05Au
g06
Aug
07Au
g08
Aug
Event time (UTC)
0
5
10
15
20
25
30
35
40
Eve
ntR
ate
(Cou
nt/D
ay)
〈N〉Running average
Clustered (FAR < 10−4)
Figure 6.8: The number of clustered events with a FAR below 10−4 Hz per(UTC) calender day. The cumulative daily event rate average is shown inblue. Shown in grey are times when there were at least two detectors inscience mode.
Perhaps most importantly, we were able to submit many of the events
with relatively low-latency, where latency is defined as the difference in time
between the event time and submission to GraCEDb. Figure 6.9 shows the
time distribution of the latencies of both the unclustered (blue crosses) and
clustered (red crosses) events. There were some high latency events, which

6.5. RESULTS OF SEARCH 141
mostly occurred during times of highly frequent submissions, which prob-
ably overloaded the available resources. This was most likely due to non-
stationary noise artifacts in the data. At other times when the submissions
were at a more realistic rate (and the noise being relatively stationary), com-
mon values of the latencies were around 30 seconds (see Figure 6.10). This
20Ju
l21
Jul
22Ju
l23
Jul
24Ju
l25
Jul
26Ju
l27
Jul
28Ju
l29
Jul
30Ju
l31
Jul
01Au
g02
Aug
03Au
g04
Aug
05Au
g06
Aug
07Au
g08
Aug
Event time (UTC)
101
102
103
Late
ncy
(s)
Unclustered (1994 events)Clustered (193 events)
Figure 6.9: The latency (time difference between the event time and submis-sion to GraCEDb) is shown as a function of time over ER2. Many of the highlatency events occurred during times of frequent submissions, indicating thatavailable resources were hung up trying to clear the abundance of triggers.A common value of latency for the clustered (red crosses) events was around30 seconds. Shown in grey are times when there were at least two detectorsin science mode.
value is about what is expected from the data flow procedure as described
in Section 6.1. There is an approximately 4 second latency in the collecting
of data and packaging into frame files, the whitener element takes a Fourier
transform every 4 seconds, the filtering elements store up to 10 seconds of
data, the triggering element is over a 4 second window, and the coincidence
test is around 10 seconds. A total of 32 seconds is what was expected, and
on average was seen.

142 CHAPTER 6. ONLINE SPIIR PIPELINE
101 102 103
Latency (s)
0
5
10
15
20
25
30
35
40
Cou
nt
Figure 6.10: The distribution of the latency time of clustered events through-out the ER2 period is shown. Three modes are seen: a common modewhen the pipeline was running as expected, mid-range latencies when themarginalised likelihood file was being updated, and high latencies when majorglitches occurred, causing too many triggers to overload the computationalresources.
Although there were some GraCEDb submissions with very low false
alarm rates, these happened when the pipeline had only been running for
a few days. We do not believe that the pipeline had built up enough back-
ground statistics to accurately estimate the FAR, so we do not claim these
as detections. Over the rest of the run, we did not submit any events with a
very low FAR, so we claimed no detections of real signals.
6.6 Blind software injections
During ER2 there was a set of simulated inspiral (amongst other) signals
injected in the strain data. The parameter boundaries and distributions were
known to GW data analysts before the run, but not the specific parameters.
Hence ER2 served as a blind analysis.

6.6. BLIND SOFTWARE INJECTIONS 143
The inspiral injections were split into three classes: binary neutron star
(NS-NS), neutron-star-black-hole binary and binary black hole, categorised
by component masses. The NS stars were classified as having masses of
1M–2M and black holes 5M–20M. Our pipeline was designed for NS-
NS signals and given our chosen component mass parameter space (1.2M–
1.475M) we could indeed only aim to pick up signals from a subset of the
NS-NS class. The component masses were uniformly distributed between
1M and 2M, and had no spin. The rate at which the simulations were
injected corresponded to the most up-to-date neutron star binary coalescence
rate estimates of 1 Mpc−3 Myr−1[29]. Assuming that the detectors were in
science mode and had an the average inspiral range of 200 Mpc [149] through-
out the three weeks, approximately 1.9 events would have been expected to
be observed on average. However, as we only covered a small part of the
NS-NS mass space (approximately (1.475−1.2)2/(2−1)2 ∼ 7.5%), there was
only a one in fourteen chance that we would discover at least one injection
for this run.
The specific injection parameters were revealed in September 2012, when
the analysis was un-blinded. From the entire list of all injections, there were
only five NS-NS injections that were within the searched parameter space of
our pipeline and occurred when at least one detector was online. Two of these
occurred when only one detector was online, and none had expected SNRs
above 4 in at least two on detectors, which was the minimum requirement
for our pipeline to report coincident triggers. These potential events are
summarised in table 6.1. Hence we should not have expected to find any
injections.

144 CHAPTER 6. ONLINE SPIIR PIPELINE
Table 6.1: Shown in this table are the five injections within our parameterspace (c.f. Section 6.4) that occurred when at least one detector was operat-ing. The expected SNRs in the three detectors are listed; bold indicates thatthe detector was online and in science mode. Our pipeline requires a mini-mum SNR of 4 for a minimum of two detectors to report coincident triggers.There were no such injections that met this criteria, so we should not haveexpected to find anything.
End time (UTC) Total mass (M) L1 SNR H1 SNR V1 SNR26 Jul 19:27:08 2.53 3.64 3.18 3.6020 Jul 04:34:56 2.77 3.80 3.14 0.3604 Aug 07:57:54 2.82 3.45 2.57 4.5721 Jul 19:54:15 2.92 5.24 4.37 2.1320 Jul 04:44:07 2.95 5.78 4.11 3.16
6.7 Discussion
By executing the SPIIR pipeline in the realistic, online environment of ER2,
we were are able to gain valuable insight into how the pipeline can be im-
proved during the advanced detector era.
In general, we found that analysing the event rate after the end of ER2
was difficult as the FAR threshold was not set by default. Although there
was good reason to manually change the threshold (i.e. to avoid flooding the
GraCEDb server with high-FAR events), the time at which it was changed
and its value was not recorded, making it nearly impossible to tell post-
analysis when we would have expected events to be submitted. Adding to this
complexity was that fact that there were occasions when the computer cluster
management program Condor would restart the gstlal iir ll inspiral
processes due to external reasons. When the jobs were restarted on the
nodes, the default FAR threshold was not set. However, no alert of the
restart was sent out, and no automation of the FAR threshold was reset.
This led to large gaps of online data not being searched. Additionally, there
were several times when broadcast of data from the sites was interrupted, and
our pipeline went into a paused state. Again, these times were not recorded
by our pipeline.
The most obvious feature in need of improvement found post-analysis was

6.7. DISCUSSION 145
the ability to log when the pipeline was running and when it was expected
to submit events to GraCEDb. This lack of logging has made it difficult to
tell how accurate the FAR of coincident triggers were. Poor FAR estimation
was to be expected in the early days after the SPIIR pipeline began, as there
were not enough non-coincident triggers collected to accurately estimate the
background. By the end of the run, enough statistics had been collected to
reasonably estimate the FAR (within a factor of two thirds). This is vastly
different from the offline case, where the FAR estimation was done post-
analysis and had the entire two weeks worth of background events (from all
templates) to estimate the likelihood from. Considering that the offline run
correctly estimated the FAR of events after collecting almost two weeks of
triggers from a wider parameter space, we are confident that given more time
to run on the online case, and given a wider parameter space, the FAR rate
would have converged to its expected value. In the future we expect to collect
many more non-coincident events before relying on the accuracy of the FAR
estimation. This could be done by running the pipeline on pre science mode
data for a few weeks.
The quality of the data during this run also seemed to cause, at times,
an over-reporting of candidates. These were most likely caused by short
periods of non-stationary noise (i.e. glitches) in the data where the change
to spectrum was too rapid for the PSD to be correctly estimated and the data
whitened. The flood of events submitted during these times likely confused
the FAR estimation code, as it took some time to learn how to deal with
high event rates such as this. Given more time, and a history of these types
of glitch-caused events, the FAR estimation code would have been able to
better assign FAR values to events like these.
Although we knew the parameter distribution and injection rate of the
blind injections, we did not know the specific parameters. Our searched
parameter space, which was limited by available computer resources, was
really too small to expect to discover anything (a one out of fourteen chance
on average). After the un-blinding of the injection parameters, we found that
there were five injections within our parameter space that occurred during
times that at least one detector was online. Our pipeline requires that a

146 CHAPTER 6. ONLINE SPIIR PIPELINE
coincident trigger be present in at least two detectors, and have a SNR above
4. None of the five injections met these criteria, hence we accurately made
no claims at true detections. In future searches, we expect to have access
to more computers with which to search for a larger parameter space. A
wider parameter space would also result in more trials for estimating the
background statistics, leading to a better FAR estimation.
Perhaps the best outcome of our test on real online data was the ability
to send out triggers for follow-up with a very low latency. We uploaded most
event candidates that were not clustered in time with a latency of around
30 seconds. Some did have higher latencies, as can be seen in the latency
tail of figure 6.10, but these mostly occurred during times of glitches, when
resources were overloaded. An improvement in data quality flags may reduce
these kinds of events, and a history of events like these can improve the FAR
estimation. The current pipeline also pauses every four to eight hours to read
in new background statistics. Future versions of the pipeline may be able to
speed the reading up. To put this in context, the latency achieved in S6 by
the MBTA method [116] was three minutes until the availability of a trig-
ger. Although the SPIIR method is a time domain method, and therefore
in principle has a zero (or at least sample time) latency, it’s implementa-
tion introduces some latency overhead, e.g; buffering of time series data into
discrete packets, whitening, coincidence tests, etc. The configuration of the
existing pipeline can be modified to improve this latency, but they may come
at a cost of other important considerations, such as computational efficiency
or parameter space. Although sub 30 second latency may be possible within
the current implementation, we believe this level of latency to be reasonable
for the amount of computational resources consumed and the current infras-
tructure of data delivery. Our measured latencies were consistent with the
other low-mass inspiral search pipelines that operated in ER2.
LIGO’s second engineering run, ER2, provided a unique opportunity to
operate the SPIIR pipeline in an online environment. From this run we were
able to assess and evaluate the strengths and weaknesses of the pipeline, and
suggest how it can be improved. The end goal of submitting GW event can-
didates for further analysis was achieved by enabling access to the GraCEDb

6.7. DISCUSSION 147
service. The interface seems to work well, and most clustered triggers were
uploaded with a latency of around 30 seconds.

148 CHAPTER 6. ONLINE SPIIR PIPELINE

Chapter 7
Conclusion
In this chapter, I will re-cap the overall aim of this thesis, and outline how
it was achieved. In the second section, I will then explain what future work
could be done to improve the research.
7.1 Thesis motivation
Numerous tests have all verified general relativity to astonishing accuracy [6].
One of the last remaining predictions of general relativity yet to be directly
observed is that of gravitational waves. Caused by non-axis symmetric bodies
that have a time-changing mass quadrupole moment, these are perturbations
of space-time. The effect of a passing GW on matter is to alternately stretch
and squeeze it. So far there has been no direct detection of this stretching
and squeezing, although there is indirect evidence for its existence in the
form of the Taylor-Hulse binary [17, 18, 19]. A worldwide effort is currently
underway to observe the strain h induced by GWs. Both the LIGO and Virgo
interferometric detectors are undergoing a major upgrade, which will see their
sensitivity improve by a factor of ten from their previous configurations.
With the imminent detection of GWs comes the question of what kind
of EM emissions they have, and what science can be explored by observing
it. Some predicted GW sources are thought to be the progenitors of highly
energetic and poorly understood astrophysical events — gamma-ray bursts.
149

150 CHAPTER 7. CONCLUSION
As transient events, GRBs are known to have a complex EM emission pro-
cess (see Section 1.5 for more information). In particular, short-hard GRBs
are thought to have compact binary coalescence events (e.g. neutron star-
neutron star binaries) as their progenitors. A rapidly fading, often not very
bright, optical prompt emission may happen within tens of seconds after the
GRB event [87]. In order to observe the EM component, one must either have
a telescope pointing in the direction of the GRB, or otherwise have a trigger
to motivate the slewing of rapid response telescopes. Considering that the
γ-ray emissions of GRBs are likely beamed [54], not all coalescence events
may have a GRB component (although their optical and radio afterglows
may be observable off axis). Another possibility is that a trigger could be
provided by detecting the preceding GW emission of the binary coalescence
progenitor. A trigger would be required to be calculated in real time and with
low-latency (of order tens of seconds). This would enable a greater scientific
understanding of the underlying physics by constraining models describing
the GRBs. The scientific questions posed can be ultimately be answered by
first implementing a low-computational resource GW inspiral search pipeline
that can send out GW triggers with low-latency.
7.2 Thesis aim
In order to observe the EM counterpart of inspiral sources, fast moving
robotic telescopes are required to respond to triggers from GW searches.
The triggers need to be provided as close to real-time as possible to max-
imise the amount of EM information recorded, and thereby validate models
of GRBs. This notion of low-latency GW detection is a relatively new direc-
tion in GW data analysis, since typical traditional methods search for GWs
in the Fourier domain, which in most cases are performed offline. The chal-
lenge of low-latency GW detection of inspiral sources will only become more
difficult in the era of advanced detectors, where the bandwidth is wider, the
signals longer, and the number of signals needed to be searched for increases.
There is a clear need for a new algorithm to search for inspiral gravita-
tional waveforms in advanced detector data with the goal of providing GW

7.2. THESIS AIM 151
triggers as close to real-time as possible. This was the aim of this thesis. This
aim was met by breaking the task into three phases: design, implementation
and testing of a new GW search method that is able to provide inspiral GW
triggers from advanced detector data with very low-latency.
Design Chapter 2 provided the background knowledge necessary to under-
stand GW data analysis, specifically for searching for inspiral gravita-
tional waveforms. The information required to build a new low-latency
inspiral search pipeline including an introduction to time-domain digi-
tal infinite impulse response (IIR) filters was given.
In Chapter 3, the design of the new time-domain low-latency algorithm
for identifying the presence of gravitational waves produced by com-
pact binary coalescence events in noisy detector data was described in
detail. This chapter was published in its entirety as an article in Phys-
ical Review D [119]. The new method is similar to matched filters,
but achieves low-latency by searching for approximate inspiral signals
strictly in the time-domain. Computational efficiency (when compared
to time-domain matched filters) is achieved by approximating the in-
spiral waveform as a summation of damped sinusoids, and then using
a summed bank of parallel infinite impulse response (SPIIR) filters to
search for the approximated waveform. Since the IIR filters operate
strictly in the time domain, the signal to noise ratio can be calculated
with in principle sample time latency. Throughout Chapter 3, my col-
laborators and I compared the ability of the SPIIR design to recover a
single canonical 1.4M–1.4M waveform in Gaussian noise to that of
the optimal matched filter approach. It was shown that with a good
choice of tuned parameters in deciding the IIR filter coefficients, the
SPIIR method can retrieve the signal to noise ratio to greater than 99%
of that produced by the optimal matched filter. The test was repeated
with many different noise realisations showing that there was not a sig-
nificant loss in detection efficiency compared to the optimal matched
filter result. This confirmed that the SPIIR method is a feasible alter-
native to the optimal matched filter.

152 CHAPTER 7. CONCLUSION
Before entering the implementation phase, Chapter 4 described some
extensions to the basic SPIIR design to optimise the computational
efficiency in a real online search. Through the use of multi-rate filtering,
the theoretical computational cost to search for a single template was
shown to be reduced by 90-95%. Also discussed in this chapter was
a design strategy to efficiently filter many templates, not just a single
template.
Implementation Although Chapter 3 showed the feasibility of the SPIIR
design, the test was not necessarily computationally efficient and exe-
cutable on a scale that would be required by a real inspiral search on
live advanced detector data. Much effort was put in to place to incor-
porate the SPIIR method into the greater GW scientific community’s
software library (LAL). This had two distinct advantages: to draw on
the wide experience of the greater data analysis group, and to make
available our code for testing and use by other GW data analysts.
From an early stage it was decided to implement the SPIIR method
within the gstlal [130] project. This is project wraps, amongst other
things, the LIGO Algorithm Library (LAL) which contains GW data
analysis programs, and the open-source signal-processing software en-
vironment GStreamer. This provided an environment to concentrate
on writing GW data analysis specific software, whilst leaving the com-
mon digital signal processing details and data flow management to the
framework of GStreamer.
Several applications to facilitate the running of a new SPIIR search
pipeline were written. An application to create the IIR filter coefficients
from a given template bank was written (described in Section 5.3).
The SPIIR application itself, which searches for templates in multiple
detector data streams was realised as an offline version (described in
Section 5.1) and an online version (described in Section 6.1). The
offline SPIIR application searches for templates in multiple detector
data streams over a fixed period of time, with the end result a database
of triggers and related template information. Further processing of

7.2. THESIS AIM 153
the database, specifically ranking triggers by likelihood and calculating
their false alarm rates, was performed post-analysis. In the online
SPIIR application, ranking was performed immediately after a trigger
is found. If the false alarm rate of the trigger was found to be below
a given threshold, event information was sent to an external server for
follow-up (see Section 6.1.1).
Testing The SPIIR method was tested in a realistic search pipeline in two
parts, an offline analysis (Chapter 5), and an online analysis (Chapter
6). Although the online analysis was the ultimate goal of the SPIIR
method, an initial offline analysis was an important test to show how
the method would cope with realistic non-Gaussian detector data.
The SPIIR method was run in an offline configuration by executing a
search pipeline on both simulated Gaussian noise and real LIGO S5
data. Our χ2-consistency check (described in Section 5.1) managed to
successfully distinguish triggers due to glitches from those due to real
signals (results in Section 5.5). Running in an offline mode allowed the
injection of many simulated signals with randomly chosen parameters.
The measured detection efficiency was compared to that from the ex-
pected SNR obtained by the optimal matched filter assuming signals
were present in Gaussian noise. The SPIIR method does not have a
significantly different efficiency at the same level of confidence. The
parameter estimation also did not seem to be very different from what
was expected.
The final and most important testing phase of the SPIIR method was
described in Chapter 6, where the method was tested in an online
configuration. A real-time search for approximately 5000 inspiral tem-
plates was executed as part of LIGO’s second engineering run, which
occurred over roughly one month in July and August 2012. Problems
discovered during the engineering run related to the logging of the
search and length of time the search was performed. However, during
the run, many event triggers with latencies around 30 seconds were
submitted. This level of latency was about what would be expected

154 CHAPTER 7. CONCLUSION
due to the implementation of the method through gstlal. A slightly
lower than expected event rate was observed, but given more time and
triggers collected, the background statistics could accurately estimate
the FAR.
7.3 Future work
Although the realisation of the SPIIR method as presented in Chapter 6
shows that the method can work as an inspiral search pipeline, longer tests
with larger template banks covering a greater parameter space would be ben-
eficial. A longer run time would allow a greater collection of non-coincident
events, ultimately giving a more accurate FAR estimation. Alternatively,
the pipeline could be run on previously collected ER2 or similar data for a
few weeks before searching live real detector data. A wider parameter space,
although more computationally expensive, would also result in more trials
to estimate the background statistics, leading to a better FAR estimation.
Also, the immediate need of better logging of the SPIIR application running
status is required to provide better information post-analysis.
Although the SPIIR method has in principle zero latency, the realisation
of the method through its implementation using the gstlal infrastructure
gives a latency of around 30 seconds. Improvements of maybe 5 or 10 seconds
might be possible whilst still using gstlal; however that may affect the
computational efficiency.
I believe it may be possible for the SPIIR method to search for a wider
parameter space without the need for greater computational resources. I can
see two approaches here; 1) reduce the amount of computation by reducing
the number of IIR filters per template, 2) use a dedicated hardware solu-
tion (such as graphical processing units — GPUs) to take advantage of the
embarrassingly parallel aspect of the SPIIR method.
The former seems like the immediately obvious choice at first, since most
of the IIR filter coefficient have similar values. As the goal of this thesis was
to have a working low-latency pipeline, I chose the first working coefficient
design, which is based on the Taylor expansion of the phase evolution, and

7.3. FUTURE WORK 155
then continued to developed the implementation. Because this method does
not take into account the parts of spectrum the detectors are most sensitive
to, it probably places IIR filters at the high frequency end that contribute
very little to the SNR. An improvement in this design may drop number
of filters by a small amount; however these are the most computationally
expensive.
Another way of reducing the number of IIR filters is to use an inter-
polation scheme as described in [4]. Although that description is for the
Newtonian order inspiral waveforms (and hence a one dimensional intrinsic
metric), it can be extended to higher order post-Newtonian expansions. The
essence of the scheme is to identify a subset of the full template bank, create
IIR filter coefficients for just these templates, and then calculate a series of
simply algebraic operations that can be applied to groups of IIR filters to
recover the rest of the templates. The planning, creation and execution of
the scheme would be a significant body of work in itself, but could result in
a significant reduction in computational cost (although is hard to estimate
here, since one would have to look at the computational cost gains across the
full parameter space).
The second strategy of using fewer computers is to use a dedicated hard-
ware solution to take advantage of the embarrassingly parallel aspect of the
SPIIR method. The SPIIR method is many simple single pole IIR filters (c.f.
Equation 3.30) operating independently of one another. Parallel processing
hardware such as GPUs can be employed to efficiently crunch the numbers.
An initial study has been performed to show the feasibility of such technol-
ogy on the SPIIR method [151]. Executing this design on a full scale inspiral
search on live detector data has yet to be performed.

156 CHAPTER 7. CONCLUSION

Bibliography
[1] D. Brown, Searching for gravitational radiation from binary black hole
MACHOs in the galactic halo., Ph.D. thesis, University of Wisconsin,
Milwaukee (2004).
[2] D. Keppel, Signatures and Dynamics of Compact Binary Coalescences
and a Search in LIGOs S5 Data, Ph.D. thesis, California Institute of
Technology (2009).
[3] C. W. Misner, K. S. Thorne, and J. A. Wheeler, Gravitation (Physics
Series), first edition ed. (W. H. Freeman, 1973).
[4] J. Luan, S. Hooper, L. Wen, and Y. Chen, “Towards low-latency real-
time detection of gravitational waves from compact binary coalescences
in the era of advanced detectors,” Phys. Rev. D 85, 102002 (2012),
arXiv:1108.3174 [gr-qc] .
[5] F. W. Dyson, A. S. Eddington, and C. Davidson, “A Determination
of the Deflection of Light by the Sun’s Gravitational Field, from Ob-
servations Made at the Total Eclipse of May 29, 1919,” Royal Society
of London Philosophical Transactions Series A 220, 291 (1920).
[6] S. G. Turyshev, “Experimental Tests of General Relativity,” Annual
Review of Nuclear and Particle Science 58, 207 (2008), arXiv:0806.1731
[gr-qc] .
[7] “PPTA,” http://www.atnf.csiro.au/research/pulsar/images/.
157

158 BIBLIOGRAPHY
[8] L. Blanchet, T. Damour, B. R. Iyer, C. M. Will, and A. G. Wiseman,
“Gravitational radiation damping of compact binary systems to sec-
ond postNewtonian order,” Phys. Rev. Lett. 74, 3515 (1995), arXiv:gr-
qc/9501027 .
[9] L. Blanchet, B. R. Iyer, C. M. Will, and A. G. Wiseman, “Gravita-
tional waveforms from inspiralling compact binaries to second-post-
Newtonian order,” Classical and Quantum Gravity 13, 575 (1996),
arXiv:gr-qc/9602024 .
[10] T. Damour, B. R. Iyer, and B. S. Sathyaprakash, “Comparison
of search templates for gravitational waves from binary inspiral,”
Phys. Rev. D 63, 044023 (2001), arXiv:gr-qc/0010009 .
[11] B. P. Abbott, R. Abbott, R. Adhikari, P. Ajith, B. Allen, G. Allen,
R. S. Amin, S. B. Anderson, W. G. Anderson, M. A. Arain, and
et al., “Search for high frequency gravitational-wave bursts in the first
calendar year of LIGO’s fifth science run,” Phys. Rev. D 80, 102002
(2009), arXiv:0904.4910 [gr-qc] .
[12] B. Abbott, R. Abbott, R. Adhikari, J. Agresti, P. Ajith, B. Allen,
R. Amin, S. B. Anderson, W. G. Anderson, M. Arain, and et al.,
“Searches for periodic gravitational waves from unknown isolated
sources and Scorpius X-1: Results from the second LIGO science run,”
Phys. Rev. D 76, 082001 (2007), arXiv:gr-qc/0605028 .
[13] J. Abadie, B. P. Abbott, R. Abbott, T. D. Abbott, M. Abernathy,
T. Accadia, F. Acernese, C. Adams, R. Adhikari, C. Affeldt, and
et al., “Upper limits on a stochastic gravitational-wave background
using LIGO and Virgo interferometers at 600-1000 Hz,” Phys. Rev. D
85, 122001 (2012), arXiv:1112.5004 [gr-qc] .
[14] B. Abbott, R. Abbott, R. Adhikari, J. Agresti, P. Ajith, B. Allen,
J. Allen, R. Amin, S. B. Anderson, W. G. Anderson, and et al., “Upper
Limits on a Stochastic Background of Gravitational Waves,” Physical
Review Letters 95, 221101 (2005), arXiv:astro-ph/0507254 .

BIBLIOGRAPHY 159
[15] B. Abbott, R. Abbott, R. Adhikari, J. Agresti, P. Ajith, B. Allen,
R. Amin, S. B. Anderson, W. G. Anderson, M. Araya, and et al.,
“Searching for a Stochastic Background of Gravitational Waves with
the Laser Interferometer Gravitational-Wave Observatory,” ApJ 659,
918 (2007), arXiv:astro-ph/0608606 .
[16] B. Abbott, R. Abbott, R. Adhikari, A. Ageev, B. Allen, R. Amin,
S. B. Anderson, W. G. Anderson, M. Araya, H. Armandula, and et al.,
“Analysis of first LIGO science data for stochastic gravitational waves,”
Phys. Rev. D 69, 122004 (2004), arXiv:gr-qc/0312088 .
[17] R. A. Hulse and J. H. Taylor, “Discovery of a pulsar in a binary sys-
tem,” Astrophys. J. Lett. 195, L51 (1975).
[18] J. M. Weisberg, D. J. Nice, and J. H. Taylor, “Timing Measurements
of the Relativistic Binary Pulsar PSR B1913+16,” Astrophys. J. 722,
1030 (2010), arXiv:1011.0718 [astro-ph.GA] .
[19] J. M. Weisberg and J. H. Taylor, “The Relativistic Binary Pulsar
B1913+16: Thirty Years of Observations and Analysis,” in Binary
Radio Pulsars, Astronomical Society of the Pacific Conference Series,
Vol. 328, edited by F. A. Rasio & I. H. Stairs (2005) p. 25, arXiv:astro-
ph/0407149 .
[20] O. Pejcha, T. A. Thompson, and C. S. Kochanek, “The observed
neutron star mass distribution as a probe of the supernova explosion
mechanism,” MNRAS 424, 1570 (2012), arXiv:1204.5478 [astro-ph.SR]
.
[21] J. M. Weisberg and J. H. Taylor, “General Relativistic Geodetic Spin
Precession in Binary Pulsar B1913+16: Mapping the Emission Beam
in Two Dimensions,” ApJ 576, 942 (2002), arXiv:astro-ph/0205280 .
[22] A. Wolszczan, “A nearby 37.9 ms radio pulsar in a relativistic binary
system,” Nature 350, 688 (1991).

160 BIBLIOGRAPHY
[23] I. H. Stairs, S. E. Thorsett, J. H. Taylor, and A. Wolszczan, “Studies
of the Relativistic Binary Pulsar PSR B1534+12. I. Timing Analysis,”
ApJ 581, 501 (2002), arXiv:astro-ph/0208357 .
[24] T. Prince, S. Anderson, S. Kulkarni, and A. Wolszczan, “Timing ob-
servations of the 8 hour binary pulsar 2127+11c in the globular cluster
m15,” Astrophys. J. Lett. 374, L41 (1991).
[25] B. A. Jacoby, P. B. Cameron, F. A. Jenet, S. B. Anderson, R. N.
Murty, and S. R. Kulkarni, “Measurement of Orbital Decay in the
Double Neutron Star Binary PSR B2127+11C,” ApJ 644, L113 (2006),
arXiv:astro-ph/0605375 .
[26] M. Burgay, N. D’Amico, A. Possenti, R. N. Manchester, A. G.
Lyne, B. C. Joshi, M. A. McLaughlin, M. Kramer, J. M. Sarkissian,
F. Camilo, V. Kalogera, C. Kim, and D. R. Lorimer, “An increased
estimate of the merger rate of double neutron stars from observations
of a highly relativistic system,” Nature 426, 531 (2003), arXiv:astro-
ph/0312071 .
[27] A. Faulkner, M. Kramer, A. Lyne, R. Manchester, M. McLaughlin,
I. Stairs, G. Hobbs, A. Possenti, D. Lorimer, N. D’Amico, F. Camilo,
and M. Burgay, “Psr j1756–2251: A new relativistic double neutron
star system,” Astrophys. J. Lett. 618, L119 (2005).
[28] D. R. Lorimer, I. H. Stairs, P. C. Freire, J. M. Cordes, F. Camilo, A. J.
Faulkner, A. G. Lyne, D. J. Nice, S. M. Ransom, Z. Arzoumanian,
R. N. Manchester, D. J. Champion, J. van Leeuwen, M. A. Mclaughlin,
R. Ramachandran, J. W. Hessels, W. Vlemmings, A. A. Deshpande,
N. D. Bhat, S. Chatterjee, J. L. Han, B. M. Gaensler, L. Kasian, J. S.
Deneva, B. Reid, T. J. Lazio, V. M. Kaspi, F. Crawford, A. N. Lommen,
D. C. Backer, M. Kramer, B. W. Stappers, G. B. Hobbs, A. Possenti,
N. D’Amico, and M. Burgay, “Arecibo Pulsar Survey Using ALFA. II.
The Young, Highly Relativistic Binary Pulsar J1906+0746,” ApJ 640,
428 (2006), arXiv:astro-ph/0511523 .

BIBLIOGRAPHY 161
[29] J. Abadie, B. P. Abbott, R. Abbott, M. Abernathy, T. Accadia, F. Ac-
ernese, C. Adams, R. Adhikari, P. Ajith, B. Allen, and et al., “TOP-
ICAL REVIEW: Predictions for the rates of compact binary coales-
cences observable by ground-based gravitational-wave detectors,” Clas-
sical and Quantum Gravity 27, 173001 (2010), arXiv:1003.2480 [astro-
ph.HE] .
[30] V. Kalogera, C. Kim, D. R. Lorimer, M. Burgay, N. D’Amico, A. Pos-
senti, R. N. Manchester, A. G. Lyne, B. C. Joshi, M. A. McLaughlin,
M. Kramer, J. M. Sarkissian, and F. Camilo, “The Cosmic Coalescence
Rates for Double Neutron Star Binaries,” ApJ 601, L179 (2004).
[31] J. Weber, “Observation of the Thermal Fluctuations of a Gravitational-
Wave Detector,” Physical Review Letters 17, 1228 (1966).
[32] J. Weber, “Anisotropy and Polarization in the Gravitational-Radiation
Experiments,” Physical Review Letters 25, 180 (1970).
[33] R. L. Forward, “Multidirectional, multipolarization antennas for scalar
and tensor gravitational radiation.” General Relativity and Gravitation
2, 149 (1971).
[34] H. Collins, Gravity’s Shadow: The Search for Gravitational Waves
(University of Chicago Press, 2004).
[35] http://www.ligo.org ().
[36] B. P. Abbott, R. Abbott, R. Adhikari, P. Ajith, B. Allen, G. Allen,
R. S. Amin, S. B. Anderson, W. G. Anderson, M. A. Arain, and et al.,
“LIGO: the Laser Interferometer Gravitational-Wave Observatory,”
Reports on Progress in Physics 72, 076901 (2009), arXiv:0711.3041
[gr-qc] .
[37] http://www.virgo.infn.it/.
[38] F. Acernese, M. Alshourbagy, P. Amico, F. Antonucci, S. Aoudia,
P. Astone, S. Avino, L. Baggio, G. Ballardin, F. Barone, L. Bar-

162 BIBLIOGRAPHY
sotti, M. Barsuglia, T. S. Bauer, S. Bigotta, S. Birindelli, M. A. Bi-
zouard, C. Boccara, F. Bondu, L. Bosi, S. Braccini, C. Bradaschia,
A. Brillet, V. Brisson, D. Buskulic, G. Cagnoli, E. Calloni, E. Cam-
pagna, F. Carbognani, F. Cavalier, R. Cavalieri, G. Cella, E. Cesarini,
E. Chassande-Mottin, A.-C. Clapson, F. Cleva, E. Coccia, C. Corda,
A. Corsi, F. Cottone, J.-P. Coulon, E. Cuoco, S. D’Antonio, A. Dari,
V. Dattilo, M. Davier, R. De Rosa, M. DelPrete, L. Di Fiore, A. Di
Lieto, M. D. P. Emilio, A. Di Virgilio, M. Evans, V. Fafone, I. Fer-
rante, F. Fidecaro, I. Fiori, R. Flaminio, J.-D. Fournier, S. Frasca,
F. Frasconi, L. Gammaitoni, F. Garufi, E. Genin, A. Gennai, A. Gia-
zotto, L. Giordano, V. Granata, C. Greverie, D. Grosjean, G. Guidi,
S. Hamdani, S. Hebri, H. Heitmann, P. Hello, D. Huet, S. Kreck-
elbergh, P. La Penna, M. Laval, N. Leroy, N. Letendre, B. Lopez,
M. Lorenzini, V. Loriette, G. Losurdo, J.-M. Mackowski, E. Majo-
rana, C. N. Man, M. Mantovani, F. Marchesoni, F. Marion, J. Mar-
que, F. Martelli, A. Masserot, F. Menzinger, L. Milano, Y. Minenkov,
C. Moins, J. Moreau, N. Morgado, S. Mosca, B. Mours, I. Neri, F. No-
cera, G. Pagliaroli, C. Palomba, F. Paoletti, S. Pardi, A. Pasqualetti,
R. Passaquieti, D. Passuello, F. Piergiovanni, L. Pinard, R. Poggiani,
M. Punturo, P. Puppo, P. Rapagnani, T. Regimbau, A. Remillieux,
F. Ricci, I. Ricciardi, A. Rocchi, L. Rolland, R. Romano, P. Ruggi,
G. Russo, S. Solimeno, A. Spallicci, M. Tarallo, R. Terenzi, A. Ton-
celli, M. Tonelli, E. Tournefier, F. Travasso, C. Tremola, G. Vajente,
J. F. J. van den Brand, S. van der Putten, D. Verkindt, F. Vetrano,
A. Vicere, J.-Y. Vinet, H. Vocca, and M. Yvert, “Status of Virgo,”
Classical and Quantum Gravity 25, 114045 (2008).
[39] TAMA300, http://tamago.mtk.nao.ac.jp.
[40] GEO600, http://www.geo600.org/.
[41] B. Abbott, R. Abbott, R. Adhikari, A. Ageev, B. Allen, R. Amin, S. B.
Anderson, W. G. Anderson, M. Araya, H. Armandula, and et al.,

BIBLIOGRAPHY 163
“Analysis of LIGO data for gravitational waves from binary neutron
stars,” Phys. Rev. D 69, 122001 (2004), arXiv:gr-qc/0308069 .
[42] D. Sigg and LIGO Scientific Collaboration, “Status of the LIGO de-
tectors,” Classical and Quantum Gravity 25, 114041 (2008).
[43] https://www.lsc-group.phys.uwm.edu/ppcomm/Papers.html.
[44] https://dcc.ligo.org ().
[45] M. Pitkin, S. Reid, and J. Hough, “Gravitational wave detection by
interferometry (ground and space),” Living Reviews in Relativity 14
(2011).
[46] G. M. Harry and LIGO Scientific Collaboration, “Advanced LIGO: the
next generation of gravitational wave detectors,” Classical and Quan-
tum Gravity 27, 084006 (2010).
[47] https://wwwcascina.virgo.infn.it/advirgo/.
[48] J. R. Smith and LIGO Scientific Collaboration, “The path to the en-
hanced and advanced LIGO gravitational-wave detectors,” Classical
and Quantum Gravity 26, 114013 (2009), arXiv:0902.0381 [gr-qc] .
[49] Advanced LIGO Reference Design, LIGO Tech. Rep. M060056 (2007).
[50] R. Powell, www.atlasoftheuniverse.com.
[51] http://stuver.blogspot.com.au/2010/10/
initial-ligo-is-dead-long-live-advanced.html.
[52] G. Hobbs, A. Archibald, Z. Arzoumanian, D. Backer, M. Bailes,
N. D. R. Bhat, M. Burgay, S. Burke-Spolaor, D. Champion, I. Cog-
nard, W. Coles, J. Cordes, P. Demorest, G. Desvignes, R. D. Ferdman,
L. Finn, P. Freire, M. Gonzalez, J. Hessels, A. Hotan, G. Janssen,
F. Jenet, A. Jessner, C. Jordan, V. Kaspi, M. Kramer, V. Kon-
dratiev, J. Lazio, K. Lazaridis, K. J. Lee, Y. Levin, A. Lommen,
D. Lorimer, R. Lynch, A. Lyne, R. Manchester, M. McLaughlin,

164 BIBLIOGRAPHY
D. Nice, S. Oslowski, M. Pilia, A. Possenti, M. Purver, S. Ran-
som, J. Reynolds, S. Sanidas, J. Sarkissian, A. Sesana, R. Shannon,
X. Siemens, I. Stairs, B. Stappers, D. Stinebring, G. Theureau, R. van
Haasteren, W. van Straten, J. P. W. Verbiest, D. R. B. Yardley, and
X. P. You, “The International Pulsar Timing Array project: using pul-
sars as a gravitational wave detector,” Classical and Quantum Gravity
27, 084013 (2010), arXiv:0911.5206 [astro-ph.SR] .
[53] http://lisa.nasa.gov/.
[54] B. D. Metzger and E. Berger, “What is the Most Promising Electro-
magnetic Counterpart of a Neutron Star Binary Merger?” ApJ 746, 48
(2012), arXiv:1108.6056 [astro-ph.HE] .
[55] B. F. Schutz, “Determining the Hubble constant from gravitational
wave observations,” Nature 323, 310 (1986).
[56] B. F. Schutz, “Lighthouses of Gravitational Wave Astronomy,” in
Lighthouses of the Universe: The Most Luminous Celestial Objects
and Their Use for Cosmology , edited by M. Gilfanov, R. Sunyeav,
and E. Churazov (2002) p. 207, arXiv:gr-qc/0111095 .
[57] J. Sylvestre, “Prospects for the Detection of Electromagnetic Coun-
terparts to Gravitational Wave Events,” ApJ 591, 1152 (2003),
arXiv:astro-ph/0303512 .
[58] C. W. Stubbs, “Linking optical and infrared observations with gravita-
tional wave sources through transient variability,” Classical and Quan-
tum Gravity 25, 184033 (2008), arXiv:0712.2598 .
[59] E. S. Phinney, “Finding and Using Electromagnetic Counterparts
of Gravitational Wave Sources,” in astro2010: The Astronomy and
Astrophysics Decadal Survey, Astronomy, Vol. 2010 (2009) p. 235,
arXiv:0903.0098 [astro-ph.CO] .
[60] J. S. Bloom, D. E. Holz, S. A. Hughes, K. Menou, A. Adams, S. F.
Anderson, A. Becker, G. C. Bower, N. Brandt, B. Cobb, K. Cook,

BIBLIOGRAPHY 165
A. Corsi, S. Covino, D. Fox, A. Fruchter, C. Fryer, J. Grindlay, D. Hart-
mann, Z. Haiman, B. Kocsis, L. Jones, A. Loeb, S. Marka, B. Metzger,
E. Nakar, S. Nissanke, D. A. Perley, T. Piran, D. Poznanski, T. Prince,
J. Schnittman, A. Soderberg, M. Strauss, P. S. Shawhan, D. H. Shoe-
maker, J. Sievers, C. Stubbs, G. Tagliaferri, P. Ubertini, and P. Woz-
niak, “Astro2010 Decadal Survey Whitepaper: Coordinated Science in
the Gravitational and Electromagnetic Skies,” ArXiv e-prints (2009),
arXiv:0902.1527 .
[61] M. Stamatikos, N. Gehrels, F. Halzen, P. Meszaros, and P. W. A.
Roming, “Multi-Messenger Astronomy with GRBs: A White Paper
for the Astro2010 Decadal Survey,” in astro2010: The Astronomy
and Astrophysics Decadal Survey, Astronomy, Vol. 2010 (2009) p. 284,
arXiv:0902.3022 [astro-ph.HE] .
[62] P. Meszaros, “Gamma-ray bursts,” Reports on Progress in Physics 69,
2259 (2006), arXiv:astro-ph/0605208 .
[63] E. Nakar, “Short-hard gamma-ray bursts,” Phys. Rep. 442, 166 (2007),
arXiv:astro-ph/0701748 .
[64] R. W. Klebesadel, I. B. Strong, and R. A. Olson, “Observations of
Gamma-Ray Bursts of Cosmic Origin,” ApJ 182, L85 (1973).
[65] CGRO, http://heasarc.gsfc.nasa.gov/docs/cgro/.
[66] G. J. Fishman, “Gamma-Ray Bursts: an Overview,” PASP 107, 1145
(1995).
[67] BeppoSAX.
[68] P. Meszaros and M. J. Rees, “Optical and Long-Wavelength After-
glow from Gamma-Ray Bursts,” ApJ 476, 232 (1997), arXiv:astro-
ph/9606043 .
[69] HETE, http://space.mit.edu/HETE/.
[70] Swift, http://swift.gsfc.nasa.gov/docs/swift/swiftsc.html.

166 BIBLIOGRAPHY
[71] Fermi, http://fermi.gsfc.nasa.gov.
[72] INTEGRAL, http://sci.esa.int/science-e/www/area/index.
cfm?fareaid=21.
[73] AGILE, http://www.iasfbo.inaf.it/activities/agile/.
[74] B. Zhang, B.-B. Zhang, F. J. Virgili, E.-W. Liang, D. A. Kann, X.-
F. Wu, D. Proga, H.-J. Lv, K. Toma, P. Meszaros, D. N. Burrows,
P. W. A. Roming, and N. Gehrels, “Discerning the Physical Origins
of Cosmological Gamma-ray Bursts Based on Multiple Observational
Criteria: The Cases of z = 6.7 GRB 080913, z = 8.2 GRB 090423,
and Some Short/Hard GRBs,” ApJ 703, 1696 (2009), arXiv:0902.2419
[astro-ph.HE] .
[75] C. Kouveliotou, C. A. Meegan, G. J. Fishman, N. P. Bhat, M. S. Briggs,
T. M. Koshut, W. S. Paciesas, and G. N. Pendleton, “Identification of
two classes of gamma-ray bursts,” ApJ 413, L101 (1993).
[76] S. E. Woosley, “Gamma-ray bursts from stellar mass accretion disks
around black holes,” ApJ 405, 273 (1993).
[77] A. I. MacFadyen and S. E. Woosley, “Collapsars: Gamma-Ray
Bursts and Explosions in “Failed Supernovae”,” ApJ 524, 262 (1999),
arXiv:astro-ph/9810274 .
[78] B. Paczynski, “Gamma-ray bursters at cosmological distances,” ApJ
308, L43 (1986).
[79] D. Eichler, M. Livio, T. Piran, and D. N. Schramm, “Nucleosynthe-
sis, neutrino bursts and gamma-rays from coalescing neutron stars,”
Nature 340, 126 (1989).
[80] R. Narayan, B. Paczynski, and T. Piran, “Gamma-ray bursts as
the death throes of massive binary stars,” ApJ 395, L83 (1992),
arXiv:astro-ph/9204001 .

BIBLIOGRAPHY 167
[81] L. Rezzolla, B. Giacomazzo, L. Baiotti, J. Granot, C. Kouveliotou,
and M. A. Aloy, “The Missing Link: Merging Neutron Stars Naturally
Produce Jet-like Structures and Can Power Short Gamma-ray Bursts,”
ApJ 732, L6 (2011), arXiv:1101.4298 [astro-ph.HE] .
[82] M. H. P. M. van Putten, “Multi-messenger emissions from Kerr black
holes,” ArXiv e-prints (2009), arXiv:0905.3367 [astro-ph.HE] .
[83] B. Zhang and P. Meszaros, “Gamma-Ray Bursts: progress, problems
and prospects,” International Journal of Modern Physics A 19, 2385
(2004), arXiv:astro-ph/0311321 .
[84] J. van Paradijs, P. J. Groot, T. Galama, C. Kouveliotou, R. G. Strom,
J. Telting, R. G. M. Rutten, G. J. Fishman, C. A. Meegan, M. Pettini,
N. Tanvir, J. Bloom, H. Pedersen, H. U. Nørdgaard-Nielsen, M. Linden-
Vørnle, J. Melnick, G. van der Steene, M. Bremer, R. Naber, J. Heise,
J. in’t Zand, E. Costa, M. Feroci, L. Piro, F. Frontera, G. Zavat-
tini, L. Nicastro, E. Palazzi, K. Bennett, L. Hanlon, and A. Parmar,
“Transient optical emission from the error box of the γ-ray burst of 28
February 1997,” Nature 386, 686 (1997).
[85] S. D. Barthelmy, P. Butterworth, T. L. Cline, N. Gehrels, F. Mar-
shall, T. Takeshima, V. Connaughton, R. M. Kippen, C. Kouveliotou,
and C. R. Robinson, “The GRB coordinates network (GCN): A status
report,” in Gamma-Ray Bursts, 4th Hunstville Symposium, American
Institute of Physics Conference Series, Vol. 428, edited by C. A. Mee-
gan, R. D. Preece, and T. M. Koshut (1998) pp. 99–103.
[86] C. Akerlof, R. Balsano, S. Barthelmy, J. Bloch, P. Butterworth,
D. Casperson, T. Cline, S. Fletcher, F. Frontera, G. Gisler, J. Heise,
J. Hills, R. Kehoe, B. Lee, S. Marshall, T. McKay, R. Miller, L. Piro,
W. Priedhorsky, J. Szymanski, and J. Wren, “Observation of con-
temporaneous optical radiation from a γ-ray burst,” Nature 398, 400
(1999), arXiv:astro-ph/9903271 .

168 BIBLIOGRAPHY
[87] J.-L. Atteia and M. Boer, “Observing the prompt emission of GRBs,”
Comptes Rendus Physique 12, 255 (2011), arXiv:1104.1211 [astro-
ph.HE] .
[88] R. Sari and T. Piran, “Predictions for the Very Early Afterglow and
the Optical Flash,” ApJ 520, 641 (1999), arXiv:astro-ph/9901338 .
[89] J. L. Racusin, S. V. Karpov, M. Sokolowski, J. Granot, X. F. Wu,
V. Pal’Shin, S. Covino, A. J. van der Horst, S. R. Oates, P. Schady,
R. J. Smith, J. Cummings, R. L. C. Starling, L. W. Piotrowski,
B. Zhang, P. A. Evans, S. T. Holland, K. Malek, M. T. Page, L. Vet-
ere, R. Margutti, C. Guidorzi, A. P. Kamble, P. A. Curran, A. Beard-
more, C. Kouveliotou, L. Mankiewicz, A. Melandri, P. T. O’Brien,
K. L. Page, T. Piran, N. R. Tanvir, G. Wrochna, R. L. Aptekar,
S. Barthelmy, C. Bartolini, G. M. Beskin, S. Bondar, M. Bremer,
S. Campana, A. Castro-Tirado, A. Cucchiara, M. Cwiok, P. D’Avanzo,
V. D’Elia, M. Della Valle, A. de Ugarte Postigo, W. Dominik, A. Fal-
cone, F. Fiore, D. B. Fox, D. D. Frederiks, A. S. Fruchter, D. Fugazza,
M. A. Garrett, N. Gehrels, S. Golenetskii, A. Gomboc, J. Goros-
abel, G. Greco, A. Guarnieri, S. Immler, M. Jelinek, G. Kasprowicz,
V. La Parola, A. J. Levan, V. Mangano, E. P. Mazets, E. Molinari,
A. Moretti, K. Nawrocki, P. P. Oleynik, J. P. Osborne, C. Pagani, S. B.
Pandey, Z. Paragi, M. Perri, A. Piccioni, E. Ramirez-Ruiz, P. W. A.
Roming, I. A. Steele, R. G. Strom, V. Testa, G. Tosti, M. V. Ulanov,
K. Wiersema, R. A. M. J. Wijers, J. M. Winters, A. F. Zarnecki,
F. Zerbi, P. Meszaros, G. Chincarini, and D. N. Burrows, “Broad-
band observations of the naked-eye γ-ray burst GRB080319B,” Nature
455, 183 (2008), arXiv:0805.1557 .
[90] M. Bringer, M. Boer, C. Peignot, G. Fontan, and C. Merce, “The
TAROT observatory data management,” A&AS 138, 581 (1999).
[91] D. M. Coward, M. Todd, T. P. Vaalsta, M. Laas-Bourez, A. Klotz,
A. Imerito, L. Yan, P. Luckas, A. B. Fletcher, M. G. Zadnik, R. R.

BIBLIOGRAPHY 169
Burman, D. G. Blair, J. Zadko, M. Boer, P. Thierry, E. J. How-
ell, S. Gordon, A. Ahmat, J. A. Moore, and K. Frost, “The Zadko
Telescope: A Southern Hemisphere Telescope for Optical Transient
Searches, Multi-Messenger Astronomy and Education,” PASA 27, 331
(2010), arXiv:1006.3933 [astro-ph.IM] .
[92] N. Bucciantini, B. D. Metzger, T. A. Thompson, and E. Quataert,
“Short gamma-ray bursts with extended emission from magnetar
birth: jet formation and collimation,” MNRAS 419, 1537 (2012),
arXiv:1106.4668 [astro-ph.HE] .
[93] A. Rowlinson, P. T. O’Brien, N. R. Tanvir, B. Zhang, P. A. Evans,
N. Lyons, A. J. Levan, R. Willingale, K. L. Page, O. Onal, D. N. Bur-
rows, A. P. Beardmore, T. N. Ukwatta, E. Berger, J. Hjorth, A. S.
Fruchter, R. L. Tunnicliffe, D. B. Fox, and A. Cucchiara, “The un-
usual X-ray emission of the short Swift GRB 090515: evidence for the
formation of a magnetar?” MNRAS 409, 531 (2010), arXiv:1007.2185
[astro-ph.HE] .
[94] N. Lyons, P. T. O’Brien, B. Zhang, R. Willingale, E. Troja, and
R. L. C. Starling, “Can X-ray emission powered by a spinning-down
magnetar explain some gamma-ray burst light-curve features?” MN-
RAS 402, 705 (2010), arXiv:0908.3798 [astro-ph.HE] .
[95] E. Troja, A. R. King, P. T. O’Brien, N. Lyons, and G. Cusumano,
“Different progenitors of short hard gamma-ray bursts,” MNRAS 385,
L10 (2008), arXiv:0711.3034 .
[96] B. Abbott, R. Abbott, R. Adhikari, A. Ageev, B. Allen, R. Amin,
S. B. Anderson, W. G. Anderson, M. Araya, H. Armandula, and
et al., “Search for gravitational waves associated with the gamma ray
burst GRB030329 using the LIGO detectors,” Phys. Rev. D 72, 042002
(2005), arXiv:gr-qc/0501068 .
[97] B. Abbott, R. Abbott, R. Adhikari, J. Agresti, P. Ajith, B. Allen,
R. Amin, S. B. Anderson, W. G. Anderson, M. Arain, and et al.,

170 BIBLIOGRAPHY
“Search for gravitational wave radiation associated with the pulsating
tail of the SGR 1806-20 hyperflare of 27 December 2004 using LIGO,”
Phys. Rev. D 76, 062003 (2007), arXiv:astro-ph/0703419 .
[98] B. Abbott, R. Abbott, R. Adhikari, J. Agresti, P. Ajith, B. Allen,
R. Amin, S. B. Anderson, W. G. Anderson, M. Arain, and et al.,
“Implications for the Origin of GRB 070201 from LIGO Observations,”
ApJ 681, 1419 (2008), arXiv:0711.1163 .
[99] B. Abbott, R. Abbott, R. Adhikari, J. Agresti, P. Ajith, B. Allen,
R. Amin, S. B. Anderson, W. G. Anderson, M. Arain, and
et al., “Search for gravitational waves associated with 39 gamma-ray
bursts using data from the second, third, and fourth LIGO runs,”
Phys. Rev. D 77, 062004 (2008), arXiv:0709.0766 [gr-qc] .
[100] B. P. Abbott, R. Abbott, F. Acernese, R. Adhikari, P. Ajith, B. Allen,
G. Allen, M. Alshourbagy, R. S. Amin, S. B. Anderson, and et al.,
“Search For Gravitational-wave Bursts Associated with Gamma-ray
Bursts using Data from LIGO Science Run 5 and Virgo Science Run
1,” ApJ 715, 1438 (2010), arXiv:0908.3824 [astro-ph.HE] .
[101] J. Abadie, B. P. Abbott, R. Abbott, T. Accadia, F. Acernese, R. Ad-
hikari, P. Ajith, B. Allen, G. Allen, E. Amador Ceron, and et al.,
“Search for Gravitational-wave Inspiral Signals Associated with Short
Gamma-ray Bursts During LIGO’s Fifth and Virgo’s First Science
Run,” ApJ 715, 1453 (2010), arXiv:1001.0165 [astro-ph.HE] .
[102] J. Abadie, B. P. Abbott, R. Abbott, M. Abernathy, T. Accadia, F. Ac-
ernese, C. Adams, R. Adhikari, C. Affeldt, B. Allen, and et al., “Search
for Gravitational Wave Bursts from Six Magnetars,” ApJ 734, L35
(2011), arXiv:1011.4079 [astro-ph.HE] .
[103] J. Abadie, B. P. Abbott, T. D. Abbott, R. Abbott, M. Abernathy,
C. Adams, R. Adhikari, C. Affeldt, P. Ajith, B. Allen, and et al.,
“Implications for the Origin of GRB 051103 from LIGO Observations,”
ApJ 755, 2 (2012), arXiv:1201.4413 [astro-ph.HE] .

BIBLIOGRAPHY 171
[104] C. S. Kochanek and T. Piran, “Gravitational Waves and gamma -Ray
Bursts,” ApJ 417, L17 (1993), arXiv:astro-ph/9305015 .
[105] E. O. Ofek, M. Muno, R. Quimby, S. R. Kulkarni, H. Stiele, W. Pietsch,
E. Nakar, A. Gal-Yam, A. Rau, P. B. Cameron, S. B. Cenko, M. M.
Kasliwal, D. B. Fox, P. Chandra, A. K. H. Kong, and R. Barnard,
“GRB 070201: A Possible Soft Gamma-Ray Repeater in M31,” ApJ
681, 1464 (2008), arXiv:0712.3585 .
[106] K. Hurley, A. Rowlinson, E. Bellm, D. Perley, I. G. Mitrofanov, D. V.
Golovin, A. S. Kozyrev, M. L. Litvak, A. B. Sanin, W. Boynton,
C. Fellows, K. Harshmann, M. Ohno, K. Yamaoka, Y. E. Nakagawa,
D. M. Smith, T. Cline, N. R. Tanvir, P. T. O’Brien, K. Wiersema,
E. Rol, A. Levan, J. Rhoads, A. Fruchter, D. Bersier, J. J. Kavelaars,
N. Gehrels, H. Krimm, D. M. Palmer, R. C. Duncan, C. Wigger, W. Ha-
jdas, J.-L. Atteia, G. Ricker, R. Vanderspek, A. Rau, and A. von Kien-
lin, “A new analysis of the short-duration, hard-spectrum GRB 051103,
a possible extragalactic soft gamma repeater giant flare,” MNRAS 403,
342 (2010), arXiv:0907.2462 [astro-ph.HE] .
[107] A. Corsi, for the LIGO Scientific Collaboration, and for the Virgo
Collaboration, “Gravitational waves and gamma-ray bursts,” ArXiv
e-prints (2012), arXiv:1204.4110 [astro-ph.CO] .
[108] Y. Gursel and M. Tinto, “Near optimal solution to the inverse problem
for gravitational-wave bursts,” Phys. Rev. D 40, 3884 (1989).
[109] S. Fairhurst, “Triangulation of gravitational wave sources with a
network of detectors,” New Journal of Physics 11, 123006 (2009),
arXiv:0908.2356 [gr-qc] .
[110] S. Nissanke, D. E. Holz, S. A. Hughes, N. Dalal, and J. L. Sievers,
“Exploring Short Gamma-ray Bursts as Gravitational-wave Standard
Sirens,” ApJ 725, 496 (2010), arXiv:0904.1017 [astro-ph.CO] .

172 BIBLIOGRAPHY
[111] L. Wen and Y. Chen, “Geometrical expression for the angular resolu-
tion of a network of gravitational-wave detectors,” Phys. Rev. D 81,
082001 (2010), arXiv:1003.2504 [astro-ph.CO] .
[112] J. Abadie, B. P. Abbott, R. Abbott, T. D. Abbott, M. Abernathy,
T. Accadia, F. Acernese, C. Adams, R. Adhikari, C. Affeldt, and
et al., “First low-latency LIGO+Virgo search for binary inspirals
and their electromagnetic counterparts,” A&A 541, A155 (2012),
arXiv:1112.6005 [astro-ph.CO] .
[113] J. Kanner, T. L. Huard, S. Marka, D. C. Murphy, J. Piscionere,
M. Reed, and P. Shawhan, “LOOC UP: locating and observing opti-
cal counterparts to gravitational wave bursts,” Classical and Quantum
Gravity 25, 184034 (2008), arXiv:0803.0312 .
[114] B. P. Abbott, R. Abbott, R. Adhikari, P. Ajith, B. Allen, G. Allen,
R. S. Amin, S. B. Anderson, W. G. Anderson, M. A. Arain, and et al.,
“Search for gravitational-wave bursts in the first year of the fifth LIGO
science run,” Phys. Rev. D 80, 102001 (2009), arXiv:0905.0020 [gr-qc]
.
[115] J. Abadie, B. P. Abbott, R. Abbott, T. Accadia, F. Acernese, R. Ad-
hikari, P. Ajith, B. Allen, G. Allen, E. Amador Ceron, and et al.,
“All-sky search for gravitational-wave bursts in the first joint LIGO-
GEO-Virgo run,” Phys. Rev. D 81, 102001 (2010), arXiv:1002.1036
[gr-qc] .
[116] D. Buskulic, Virgo Collaboration, and LIGO Scientific Collaboration,
“Very low latency search pipeline for low mass compact binary coales-
cences in the LIGO S6 and Virgo VSR2 data,” Classical and Quantum
Gravity 27, 194013 (2010).
[117] K. Cannon, R. Cariou, A. Chapman, M. Crispin-Ortuzar, N. Fotopou-
los, M. Frei, C. Hanna, E. Kara, D. Keppel, L. Liao, S. Privitera,
A. Searle, L. Singer, and A. Weinstein, “Toward Early-warning Detec-

BIBLIOGRAPHY 173
tion of Gravitational Waves from Compact Binary Coalescence,” ApJ
748, 136 (2012), arXiv:1107.2665 [astro-ph.IM] .
[118] K. Cannon, A. Chapman, C. Hanna, D. Keppel, A. C. Searle, and
A. J. Weinstein, “Singular value decomposition applied to compact bi-
nary coalescence gravitational-wave signals,” Phys. Rev. D 82, 044025
(2010).
[119] S. Hooper, S. K. Chung, J. Luan, D. Blair, Y. Chen, and L. Wen,
“Summed parallel infinite impulse response filters for low-latency detec-
tion of chirping gravitational waves,” Phys. Rev. D 86, 024012 (2012),
arXiv:1108.3186 [gr-qc] .
[120] http://www.ligo.org/science/GW-IFO.php.
[121] W. G. Anderson, P. R. Brady, J. D. Creighton, and E. E. Flanagan,
“Excess power statistic for detection of burst sources of gravitational
radiation,” Phys. Rev. D 63, 042003 (2001), arXiv:gr-qc/0008066 .
[122] L. A. Wainstein and V. D. Zubakov, Extraction of Signals from Noise
(Prentice-Hall, 1962).
[123] S. Babak, R. Balasubramanian, D. Churches, T. Cokelaer, and B. S.
Sathyaprakash, “A template bank to search for gravitational waves
from inspiralling compact binaries: I. Physical models,” Classical and
Quantum Gravity 23, 5477 (2006), arXiv:gr-qc/0604037 .
[124] B. Abbott, R. Abbott, R. Adhikari, A. Ageev, B. Allen, R. Amin, S. B.
Anderson, W. G. Anderson, M. Araya, H. Armandula, and et al.,
“Search for gravitational waves from galactic and extra-galactic binary
neutron stars,” Phys. Rev. D 72, 082001 (2005), arXiv:gr-qc/0505041
.
[125] P. R. Brady and S. Fairhurst, “Interpreting the results of searches for
gravitational waves from coalescing binaries,” Classical and Quantum
Gravity 25, 105002 (2008), arXiv:0707.2410 [gr-qc] .

174 BIBLIOGRAPHY
[126] F. Acernese, F. Barone, R. De Rosa, A. Eleuteri, and L. Milano, “IIR
adaptive line enhancer filters for detection of gravitational waves from
coalescing binaries,” Classical and Quantum Gravity 21, 781 (2004).
[127] B. P. Abbott, R. Abbott, R. Adhikari, P. Ajith, B. Allen, G. Allen,
R. S. Amin, S. B. Anderson, W. G. Anderson, M. A. Arain, and et al.,
“Search for gravitational waves from low mass binary coalescences in
the first year of LIGO’s S5 data,” Phys. Rev. D 79, 122001 (2009),
arXiv:0901.0302 [gr-qc] .
[128] D. B. Fox, D. A. Frail, P. A. Price, S. R. Kulkarni, E. Berger, T. Piran,
A. M. Soderberg, S. B. Cenko, P. B. Cameron, A. Gal-Yam, M. M.
Kasliwal, D. Moon, F. A. Harrison, E. Nakar, B. P. Schmidt, B. Pen-
prase, R. A. Chevalier, P. Kumar, K. Roth, D. Watson, B. L. Lee,
S. Shectman, M. M. Phillips, M. Roth, P. J. McCarthy, M. Rauch,
L. Cowie, B. A. Peterson, J. Rich, N. Kawai, K. Aoki, G. Kosugi,
T. Totani, H. Park, A. MacFadyen, and K. C. Hurley, “The afterglow
of GRB 050709 and the nature of the short-hard γ-ray bursts,” Nature
437, 845 (2005), arXiv:astro-ph/0510110 .
[129] B. Abbott, R. Abbott, R. Adhikari, J. Agresti, P. Ajith, B. Allen,
R. Amin, S. B. Anderson, W. G. Anderson, M. Arain, and et al.,
“Search for gravitational waves from binary inspirals in S3 and S4 LIGO
data,” Phys. Rev. D 77, 062002 (2008), arXiv:0704.3368 [gr-qc] .
[130] gstlal, https://www.lsc-group.phys.uwm.edu/daswg/projects/
gstlal.html.
[131] L. Blanchet, T. Damour, and B. R. Iyer, “Gravitational waves from in-
spiralling compact binaries: Energy loss and waveform to second-post-
Newtonian order,” Phys. Rev. D 51, 5360 (1995), arXiv:gr-qc/9501029
.
[132] B. Allen, “χ2 time-frequency discriminator for gravitational wave de-
tection,” Phys. Rev. D 71, 062001 (2005), arXiv:gr-qc/0405045 .

BIBLIOGRAPHY 175
[133] S. Droz, D. J. Knapp, E. Poisson, and B. J. Owen, “Gravitational
waves from inspiraling compact binaries: Validity of the stationary-
phase approximation to the Fourier transform,” Phys. Rev. D 59,
124016 (1999), arXiv:gr-qc/9901076 .
[134] A. V. Oppenheim and R. W. Schafer, Digital Signal Processing, edited
by Oppenheim, A. V. & Schafer, R. W. (Prentice Hall, 1975).
[135] L. R. Rabiner and B. Gold, Englewood Cliffs, N.J., Prentice-Hall, Inc.,
1975. 777 p., edited by Rabiner, L. R. & Gold, B. (Prentice-Hall, Inc,
1975).
[136] Y. Liu, “Gpu-accelerated parallel infinite impulse response filtering
method for gravitational wave detection,” J. Comput. Phys. (2011),
(in preparation).
[137] https://www.lsc-group.phys.uwm.edu/daswg/projects/lal/
nightly/docs/html/LALAdvLIGOPsd_8c_source.html.
[138] J. Abadie, B. P. Abbott, R. Abbott, M. Abernathy, T. Accadia, F. Ac-
ernese, C. Adams, R. Adhikari, P. Ajith, B. Allen, and et al., “Search
for gravitational waves from compact binary coalescence in LIGO and
Virgo data from S5 and VSR1,” Phys. Rev. D 82, 102001 (2010),
arXiv:1005.4655 [gr-qc] .
[139] J. Slutsky, L. Blackburn, D. A. Brown, L. Cadonati, J. Cain,
M. Cavaglia, S. Chatterji, N. Christensen, M. Coughlin, S. Desai,
G. Gonzalez, T. Isogai, E. Katsavounidis, B. Rankins, T. Reed,
K. Riles, P. Shawhan, J. R. Smith, N. Zotov, and J. Zweizig, “Methods
for reducing false alarms in searches for compact binary coalescences
in LIGO data,” Classical and Quantum Gravity 27, 165023 (2010),
arXiv:1004.0998 [gr-qc] .
[140] lalsuite, https://www.lsc-group.phys.uwm.edu/daswg/projects/
lalsuite.html.
[141] gstreamer, www.gstreamer.net/.

176 BIBLIOGRAPHY
[142] K. Cannon, C. Hanna, and D. Keppel, “A method to estimate the
significance of coincident gravitational-wave observations from compact
binary coalescence,” ArXiv e-prints (2012), arXiv:1209.0718 [gr-qc] .
[143] The LIGO Scientific Collaboration, the Virgo Collaboration, J. Abadie,
B. P. Abbott, R. Abbott, M. Abernathy, T. Accadia, F. Acernese,
C. Adams, R. Adhikari, and et al., “Sensitivity to Gravitational Waves
from Compact Binary Coalescences Achieved during LIGO’s Fifth and
Virgo’s First Science Run,” ArXiv e-prints (2010), arXiv:1003.2481
[gr-qc] .
[144] The LIGO Scientific Collaboration and The Virgo Collaboration, “Sen-
sitivity Achieved by the LIGO and Virgo Gravitational Wave Detec-
tors during LIGO’s Sixth and Virgo’s Second and Third Science Runs,”
ArXiv e-prints (2012), arXiv:1203.2674 [gr-qc] .
[145] P. Sutton, “S3 performance of the ligo interferometers as
measured by sensemonitor,” (2003), https://dcc.ligo.org/cgi-
bin/private/DocDB/ShowDocument?docid=27267.
[146] K. G. Arun, B. R. Iyer, B. S. Sathyaprakash, and P. A. Sundarara-
jan, “Parameter estimation of inspiralling compact binaries using 3.5
post-Newtonian gravitational wave phasing: The nonspinning case,”
Phys. Rev. D 71, 084008 (2005), arXiv:gr-qc/0411146 .
[147] S. Babak, R. Biswas, P. R. Brady, D. A. Brown, K. Cannon, C. D. Ca-
pano, J. H. Clayton, T. Cokelaer, J. D. E. Creighton, T. Dent, A. Di-
etz, S. Fairhurst, N. Fotopoulos, G. Gonzalez, C. Hanna, I. W. Harry,
G. Jones, D. Keppel, D. J. A. McKechan, L. Pekowsky, S. Privitera,
C. Robinson, A. C. Rodriguez, B. S. Sathyaprakash, A. S. Sengupta,
M. Vallisneri, R. Vaulin, and A. J. Weinstein, “Searching for gravita-
tional waves from binary coalescence,” Phys. Rev. D 87, 024033 (2013),
arXiv:1208.3491 [gr-qc] .
[148] LIGO Scientific Collaboration, Virgo Collaboration, J. Aasi, J. Abadie,
B. P. Abbott, R. Abbott, T. D. Abbott, M. Abernathy, T. Accadia,

BIBLIOGRAPHY 177
F. Acernese, and et al., “Prospects for Localization of Gravitational
Wave Transients by the Advanced LIGO and Advanced Virgo Obser-
vatories,” ArXiv e-prints (2013), arXiv:1304.0670 [gr-qc] .
[149] Advanced LIGO anticipated sensitivity curves (2010).
[150] Condor, http://research.cs.wisc.edu/condor/.
[151] Y. Liu, Z. Du, S. K. Chung, S. Hooper, D. Blair, and L. Wen, “GPU-
accelerated low-latency real-time searches for gravitational waves from
compact binary coalescence,” Classical and Quantum Gravity 29,
235018 (2012).

178 BIBLIOGRAPHY