Embed Size (px)
Citation preview

Location
Y. Richard Yang
4/6/2011

2
Wireless Networking: Summary
send receive
status
info info/control
- The ability to communicate is a foundational support of wireless mobile networks- Unfortunately, the capacity of such networks using current techniques is limited- Much progress has been made, but still more are coming.

Outline
Admin. Localization
overview
3

4
Motivations The ancient question:
Where am I?
Localization is the process of determining the positions of the network nodes
This is as fundamental a primitive as the ability to communicate

5
Localization: Many Applications
Location aware information services e.g., E911, location-based search,
advertisement, inventory management, traffic monitoring, emergency crew coordination, intrusion detection, air/water quality monitoring, environmental studies, biodiversity, military applications, resource selection (server, printer, etc.)
“Sensing data without knowing the location is meaningless.” [IEEE Computer, Vol. 33, 2000]

6
Measurements
The Localization Process
Localizability (opt)
Location Computation
Location Based Applications

7
Classification of Localization based on Measurement Modality Coarse-grained measurements, e.g.,
signal signature • a database of signal signature (e.g. pattern of received
signal, visible set of APs (http://www.wigle.net/)) at different locations
• match to the signature connectivity
Usage e.g., Microsoft “Locate Me” Place lab: http://data.placelab.org/
Advantages low cost; measurements do not need line-of-sight
Disadvantages low precision
For a detailed study, see “Accuracy Characterization for Metropolitan-scale Wi-Fi Localization,” in Mobisys 2005.
8
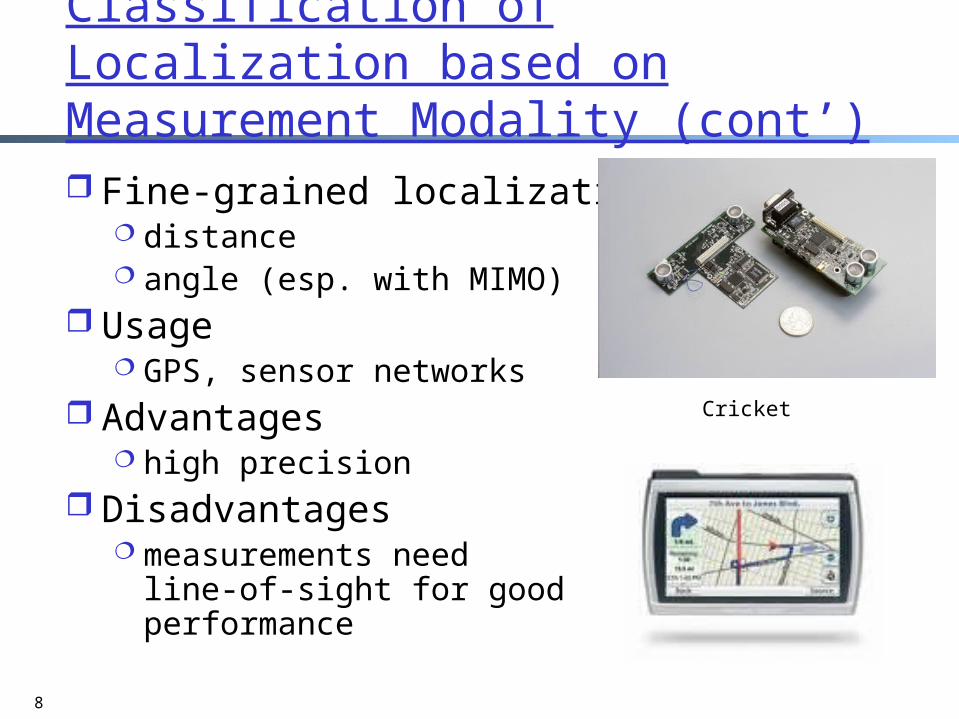
Classification of Localization based on Measurement Modality (cont’) Fine-grained localization
distance angle (esp. with MIMO)
Usage GPS, sensor networks
Advantages high precision
Disadvantages measurements need
line-of-sight for goodperformance
Cricket

Outline
Admin. Localization
Overview GPS
9

10
Global Position Systems
US Department of Defense: need for very precise navigation
In 1973, the US Air Force proposed a new system for navigation using satellites
The system is known as: Navigation System with Timing and Ranging: Global Positioning System or NAVSTAR GPS
http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html

11
GPS Operational Capabilities
Initial Operational Capability - December 8,
1993
Full Operational Capability declared by the
Secretary of Defense at 00:01 hours onJuly 17, 1995

12
NAVSTAR GPS Goals
What time is it? What is my position (including attitude)? What is my velocity? Other Goals: - What is the local time? - When is sunrise and sunset? - What is the distance between two
points? - What is my estimated time arrival?

13
GSP Basics
Simply stated: The GPS satellites are nothing more than a set of wireless base stations in
the sky
The satellites simultaneously broadcast beacon messages (called navigation messages)
A GPS receiver measures time of arrival to the satellites, and then uses “trilateration” to determine its position

14
GPS Basics: Triangulation
Measurement:
Computes distance
c
pptt SR 11
)( 11
SR ttcpp

15
GPS Basics: Triangulation
In reality, receiver clockis not sync’d with satellites
Thus need to estimate clock
driftclockSR
c
dtt 11 )( 1
1 driftclockSR ttcpp
driftclockSR cttc )( 1
called pseudo range

16
GPS with Clock Synchronization?

17
GPS Design/Operation
Segments (components)user segment: users with receivers
control segment: control the satellites
space segment: • the constellation of satellites• transmission scheme

18
Control Segment
Master Control Station is located at the Consolidated Space Operations Center (CSOC) at Flacon Air Force Station nearColorado Springs

19
CSOC
Track the satellites for orbit and clock determination
Time synchronization
Upload the Navigation Message
Manage Denial Of Availability (DOA)

20
Space Segment: Constellation

21
Space Segment: Constellation
System consists of 24 satellites in the operational mode: 21 in use and 3 spares
3 other satellites are used for testing Altitude: 20,200 Km with periods of 12 hr. Current Satellites: Block IIR- $25,000,000
2000 KG Hydrogen maser atomic clocks
these clocks lose one second every 2,739,000 million years

22
GPS Orbits

23
GPS Satellite Transmission Scheme: Navigation Message
To compute position one must know the positions of the satellites
Navigation message consists of: - satellite status to allow calculating pos - clock info
Navigation Message at 50 bps each frame is 1500 bits Q: how long for each message?
More detail: see http://home.tiscali.nl/~samsvl/nav2eu.htm

24
GPS Satellite Transmission Scheme: Requirements
All 24 GPS satellites transmit Navigation Messages on the same frequencies
Resistant to jamming
Resistant to spoofing
Allows military control of access (selected availability)

25
GPS As a Communication Infrastructure
All 24 GPS satellites transmit on the same frequencies BUT use different codes i.e., Direct Sequence Spread Spectrum
(DSSS), and Code Division Multiple Access (CDMA) Using BPSK to encode bits

26
Basic Scheme

27
GPS Control
Controlling precision Lower chipping rate, lower precision
Control access/anti-spoofing Control chipping sequence

28
GPS Chipping Seq. and Codes
Two types of codes C/A Code - Coarse/Acquisition Code
available for civilian use on L1• Chipping rate: 1.023 M• 1023 bits pseudorandom numbers (PRN)
P Code - Precise Code on L1 and L2 used by the military
• Chipping rate: 10.23 M• PRN code is 6.1871 × 1012 (repeat about one
week)• P code is encrypted called P(Y) codehttp://www.navcen.uscg.gov/gps/geninfo/IS-GPS-200D.pdf
http://www.gmat.unsw.edu.au/snap/gps/gps_survey/chap3/chap3.htm

29
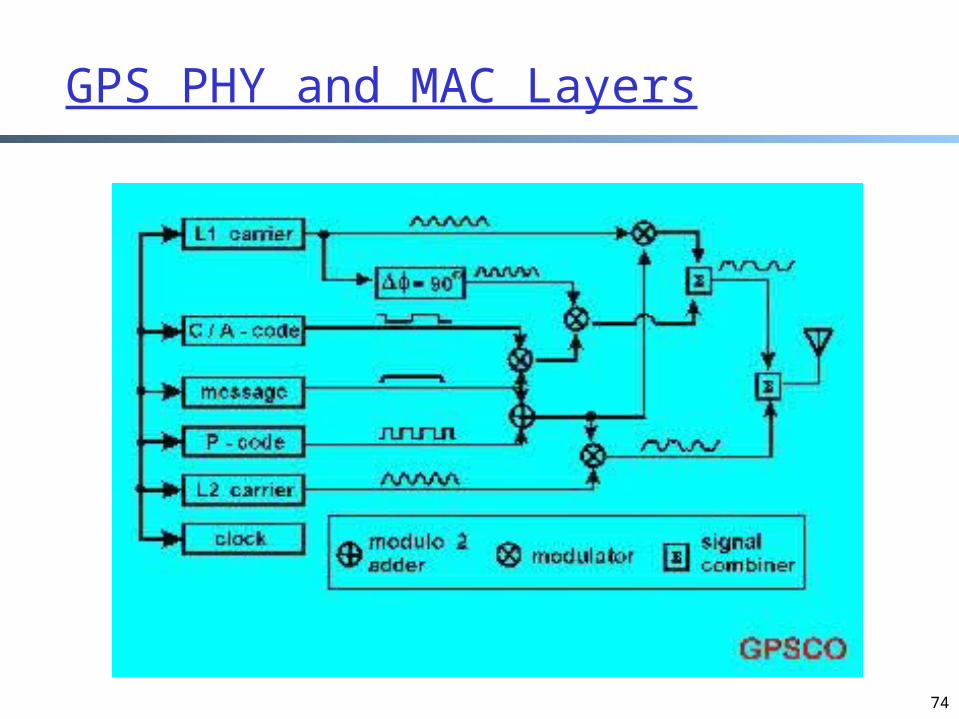
GPS PHY and MAC Layers

30
Typical GPS Receiver: C/A code on L1
During the “acquisition” time you are receiving the navigation message also on L1
The receiver then reads the timing information and computes “pseudo-ranges”

Military Receiver
Decodes both L1 and L2 L2 is more precise L1 and L2
difference allows computing ionospheric delay
31

32
Denial of Accuracy (DOA)
The US military uses two approaches to prohibit use of the full resolution of the system
Selective availability (SA) noise is added to the clock signal and the navigation message has “lies” in it SA is turned off permanently in 2000
Anti-Spoofing (AS) - P-code is encrypted

33
Extensions to GPS Differential GPS
ground stations with known positions calculate positions using GPS
the difference (fix) transmitted using FM radio used to improve accuracy
Assisted GPS put a server on the ground to help a GPS receiver reduces GPS search time from minutes to seconds E.g., iPhone GPS:
http://www.broadcom.com/products/GPS/GPS-Silicon-Solutions/BCM4750
34
GPS: Summary
GPS is among the “simplest” localization technique (in terms topology): one-step trilateration

35
GPS Limitations
Hardware requirements vs. small devices
GPS jammed by sophisticated adversaries
Obstructions to GPS satellites common• each node needs LOS to 4 satellites • GPS satellites not necessarily overhead, e.g., urban
canyon, indoors, and underground

36
Percentage of localizable nodes localized by Trilateration.
Uniformly random 250 node network.
Limitation of TrilaterationR
atio
Average Degree

Outline
Admin. GPS General localization
37

38
Extending GPS: Multilateration A subset of nodes (called anchors) know their
positions through GPS, e.g., nodes close to windows, at the
entrance of a cave, at an open field inside a forest, etc manual configuration
Nodes measure relative distance among each other
5
4
1
2
3

39
General Localization
node with known position (anchor)
node with unknown position
distance measurement

40
Localization Service Definition
Given: set of n nodes positions of k of them known distances between m pairs of nodesFind: positions of nodes
node with known position (anchor)
node with unknown position
distance measurement

Outline
Admin. GPS General localization
Overview Foundation
41

42
Measurement Graph
Consider network nodes as vertices in a graph
There is an edge between two vertices if the distance between the corresponding nodes are known
5
4
1
2
3
5
4
1
2
3

43
Grounded Graph The measurement graph structure needs to
distinguish between anchor nodes and non-anchor nodes
Solution: add an edge between every pair of anchor nodes, since the distance between them is implicitly known!
The resulting graph is called grounded graph, whose graphical properties determine localizability with probability 1
5
4
1
2
35
4
1
2
3

44
Grounded Graphs
The grounded graph captures all distance constraintswe no longer need to distinguish between
anchor nodes and non-anchor nodesuse anchor only at the last to pinpoint all
nodes

45
In case you were wondering: Why “with probability 1”?
2
1
3
4
probability 1 case
2
1
3
4
probability 0 case
4
2
13
{x1, x2, x3}
{d14, d24, d34}
2
1
3
?
?
In general, this graph is uniquely realizable.
In degenerate case, it is not:The constraints are redundant.

46
Summary of Problem: General Localization using Grounded Graphs
Determine if the positions of all nodes are fixed relative to each other due to the known distance measurements, then all nodes have unique positions (the network is thus localizable) Then the only deformation allowed is
translation or rotation of the complete network
This is called trivial continuous transformation
Use anchors can remove trivial transformation
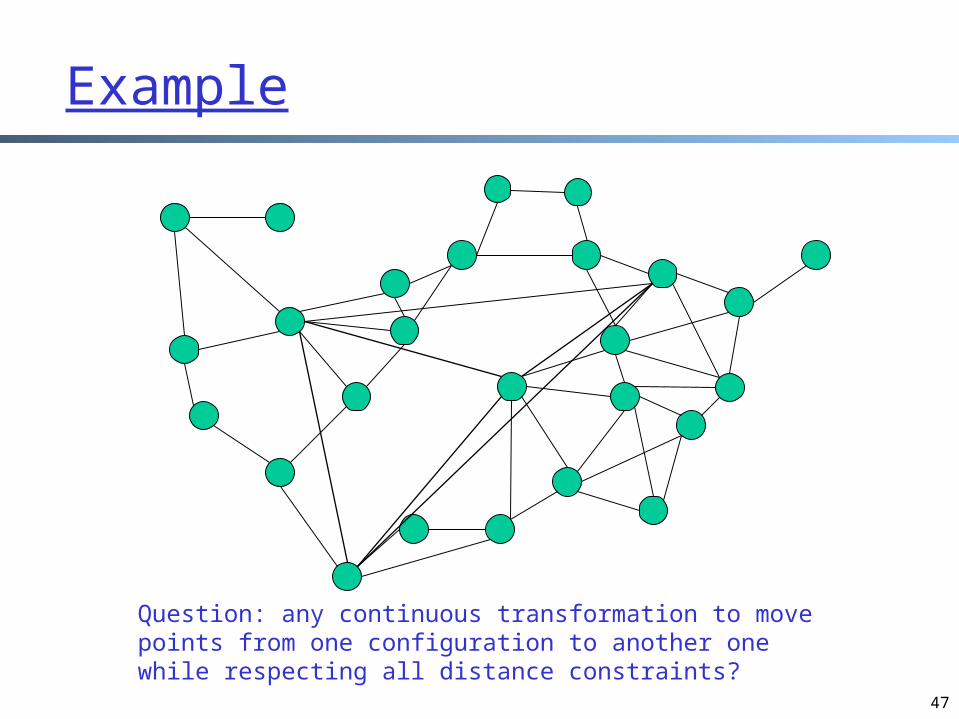
Example
47
Question: any continuous transformation to move points from one configuration to another one while respecting all distance constraints?

48
Non-Uniqueness Due to Continuous Deformation
Continuous non-uniqueness: -Non-trivial continuous transformation to move points from one configuration to another one while respecting all distance constraints

49
Graph Rigidity
A localization network is flexible if it admits a non-trivial continuous deformation
A localization network with a unique realization cannot be flexible
A localization network that is not flexible is called rigid
Rigidity is a necessary condition for network localizability

Rigidity in Other Contexts
50

51

52
Intuition:
Total degrees of freedom: 2n
How many distance constraints are necessary to limit a graph toonly trivial continuous deformations?
==How many edges are necessary for a graph to be rigid?

53
Each edge can remove a single degree of freedom
How Many Constrains are Necessary to Make a Localization Network of n Nodes Rigid?
Rotations and translations will always be possible, so at least 2n-3edges are necessary for a graph to be rigid.

54
Are 2n-3 Edges Sufficient?
n = 3, 2n-3 = 3
yes yes
n = 4, 2n-3 = 5 n = 5, 2n-3 = 7
no

55
Further Intuition
Need at least 2n-3 “well-distributed” edges
If not well-distributed, a subgraph has more edges than necessary: some edges are redundant
Non-redundant edgesare called independent
n = 5, 2n-3 = 7
56
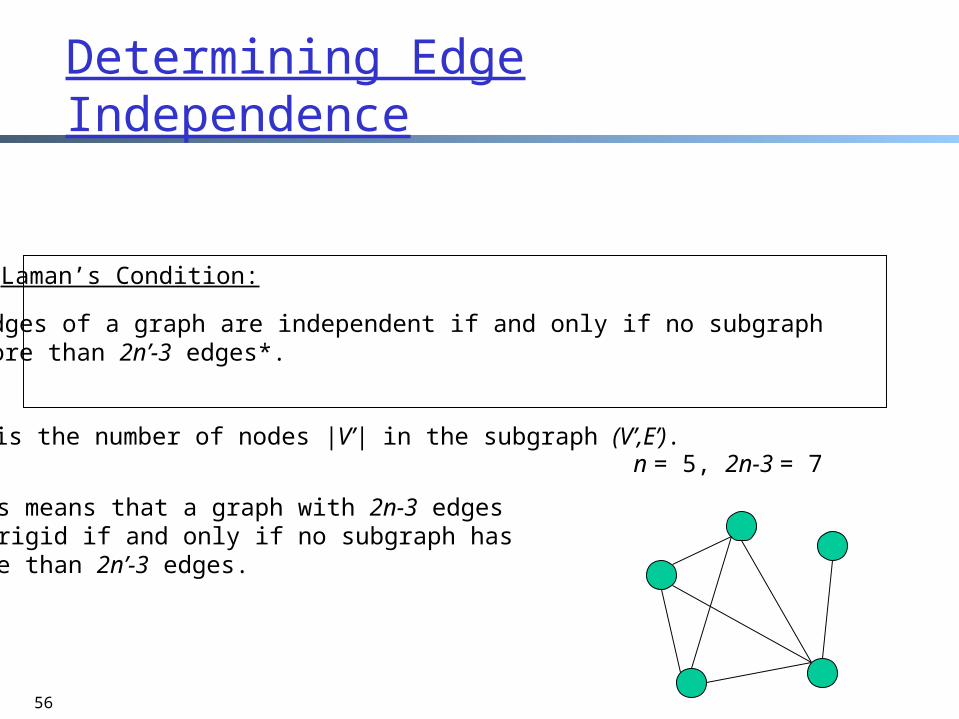
Determining Edge Independence
This means that a graph with 2n-3 edges is rigid if and only if no subgraph has more than 2n’-3 edges.
* n’ is the number of nodes |V’| in the subgraph (V’,E’).
The edges of a graph are independent if and only if no subgraph has more than 2n’-3 edges*.
Laman’s Condition:
n = 5, 2n-3 = 7

57
Algorithm to Test Laman’s Condition
Laman’s condition taken literally leads to poor algorithm, as it involves checking all subgraphs
Efficient and intuitive algorithm exists, based on counting degrees of freedom to check and identify rigid components

58
Alternate Laman’s condition
For a graph G=(V,E) with m edges and nvertices, the following are equivalent:
A. The edges of G are independent in 2-D.B. For each edge (a,b) in G, the graph formed
by adding 3 additional copies of (a,b) has no subgraph G’ with more than 2n’ edges.

59
Illustration
no subgraph with >2n’ edges
“quadruple an edge”
G

60
Basic idea
Grow a maximal set of independent edges one at a time
Each candidate edge quadrupled and the resulting graph tested using Laman’s revised condition
If 2n’-3 independent edges found for n’ nodes, the subgraph is rigid

61
“The Pebble Game”
Each node assigned 2 pebbles
An edge is covered by having one pebble placed on either of its ends
Pebble covering is assignment of pebbles so that all edges in graph are covered
Existence of pebble covering of graph implies balanced edges implies all edges independent

62
initialtesting e1 for independence
e1
4 co
pies
of e
2
Pebble Covering
e2

63
Assume we have a set of independent edges covered with pebbles and we want to add a new edge
First, look at vertices incident to new edge if either has a free pebble, use it to cover the edge
and done. otherwise, their pebbles are covering existing edges.
• if vertex at other end of one of these edges has free
pebble, then use that pebble to cover existing edge, freeing up pebble to cover new edge
• Search for free pebbles in a directed graph.– if edge ea,b is covered by pebble from vertex a, the edge if
directed from a to b
• Search until pebble is found, then swap pebbles until new edge covered, else fail
Pebble Game Algorithm

64
0
1
2
3
1
2
3
3
2
3
4
4
0
5
4
3
1
2
3
3
2
3
4
4
unassigned pebble Assume node 0 gets a new edge to cover.

65
a
b c
d
initial state
a
c
d
a
c
d
b
(a,b) independent
testing (a,b)
b
after (a,b) included

66
cba
c
d
b
input to next step
a d
a
c
d
b
after (b,c) included
testing (b,c)

67
a
a
c
d
b
input to next step c
d
b
testing (a,c)
?
a
c
d
b
after (a,c) included

68
d
a
c
d
b
input to next step
a
cb
testing (a,d)
a
c
d
b
after (a,d) included

69
b
d
a
c
d
b
input to next step
a
c
d
b
after (b,d) included
a
c
testing (b,d)
G=({a,b,c,d}, {ab,ac,ad,bc,bd})is rigid

70
a
c
d
b
input to next step
a
c
d
b
testing (c,d) fails!

71
Pebble Game Properties
Testing edge for independence takes O(n) time. At worst, all m edges will be tested for a running time of O(nm)
If entire graph not rigid, pebble game discovers rigid subgraphs
Algorithm is amenable to distributed implementation

72
Continuous Deformation Solved
Continuous non-uniqueness: -Can move points from one configuration to the other while respecting constraints

Backup Slides
73
74
GPS PHY and MAC Layers

75

76
GPS Chipping Seq. and Codes
Two types of codes C/A Code - Coarse/Acquisition Code
available for civilian use on L1• 1023 bits pseudorandom numbers (PRN)
P Code - Precise Code on L1 and L2 used by the military
• PRN code is 6.1871 × 1012 (repeat about one week)
• P code is encrypted called P(Y) code
http://www.navcen.uscg.gov/gps/geninfo/IS-GPS-200D.pdf
http://www.gmat.unsw.edu.au/snap/gps/gps_survey/chap3/chap3.htm





























