Embed Size (px)
Citation preview
Location Centric Distributed Computation and Signal
Processing
University of Wisconsin, Madison
Acknowledgements:DARPA SensIT Contract F30602-00-2-0055
Team Members
Faculty P. Ramanathan A. Sayeed
Students K.-C. Wang T.-L. Chin T. Clouqueur
Y.-H. Hu K. K. Saluja
A. Ashraf A. D’Costa M. Duarte
D. Li X. Sheng V.
Phipatansuphorn

Sensor Network Characteristics
Commands/queries are typically issued to a geographic region instead of specific nodes, such as: Average temperature in a given region Unidentified object counts in a given region Specific object tracking in a given region
Only devices in the specified geographic region need to participate in executing a command/query
Solution: Location-Centric Computing

Location-Centric Computing?
All nodes are aware of own location (GPS).
However, geographic regions are the only addressable entities. Regions play the traditional role of a node. Regions are created before commands are issued. Each node participates in activities of regions it
belongs to. Embedded manager region coordinates
intra-region activities.
Implementation
Application Programming Interface UW-API:
Set of communication primitives tailored for location centric information exchange
Networking Support UW-Routing:
Location-aware routing scheme for wireless ad hoc sensor networks
UW-API
Data exchange primitives:
Affinity with standard message passing interface for distributed computing E.g. the well-known MPI 1.1 library
Regional communication services: Send, Receive, Reduce, Barrier
Administrative primitives: Create_region and delete_region

UW-API
Example: SN_Send Sends a message from a node to all nodes in
the addressed region Used to send commands and data
Example: SN_Reduce Aggregates data within a region. Aggregates data as min, max, average, sum, …. Collect results in embedded manager region.
UW-Routing
A location-aware on-demand routing protocol Each node maintains a routing table of paired
[destination region, next hop] entries.
Routing entry is created on demand using RouteRequest (RREQ) and RouteReply (RREP).
RREQ and RREP flood in a limited scope similar to Location-aided Routing [Vaidya] .

Inter-Region and Intra-Region Routing for Send
1. Message sent from a source node to a region.
2. Message flooded to all nodes in the region.
Collaborative Target Tracking
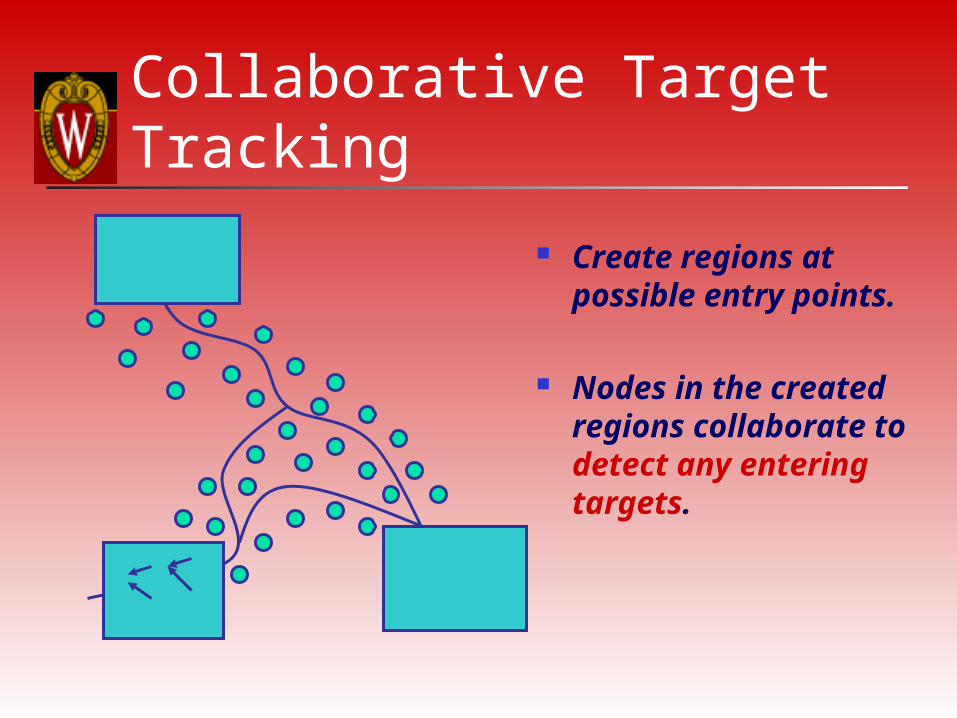
Create regions at possible entry points.
Nodes in the created regions collaborate to detect any entering targets.

Collaborative Target Tracking
When a target is detected, nodes in the region start localization and tracking.
Tracking results are used to estimate future target locations.
Additional regions are created in possible target locations.
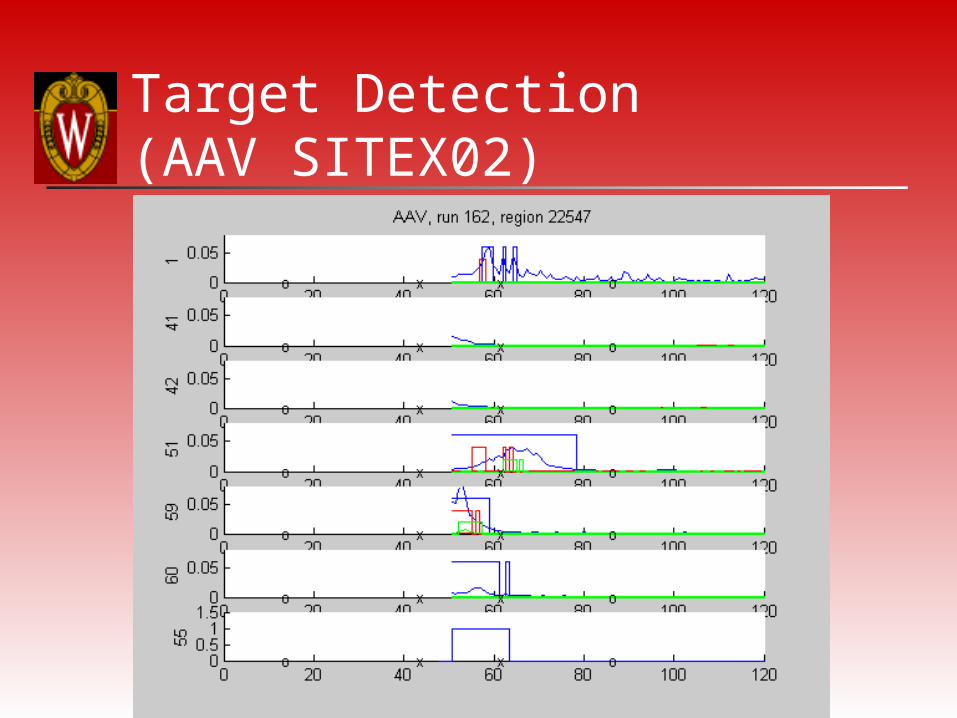
Target Detection
At each node: Energy Detector Dynamic noise level
estimation.
Target detected if received energy exceeds estimated noise level.
Constant false alarm rate maintained.
Within a region: Decision fusion Nodal detection
decisions sent to manager nodes.
Manager nodes fuse nodal decisions into regional decision.
Different fusion wrights for different modalities.

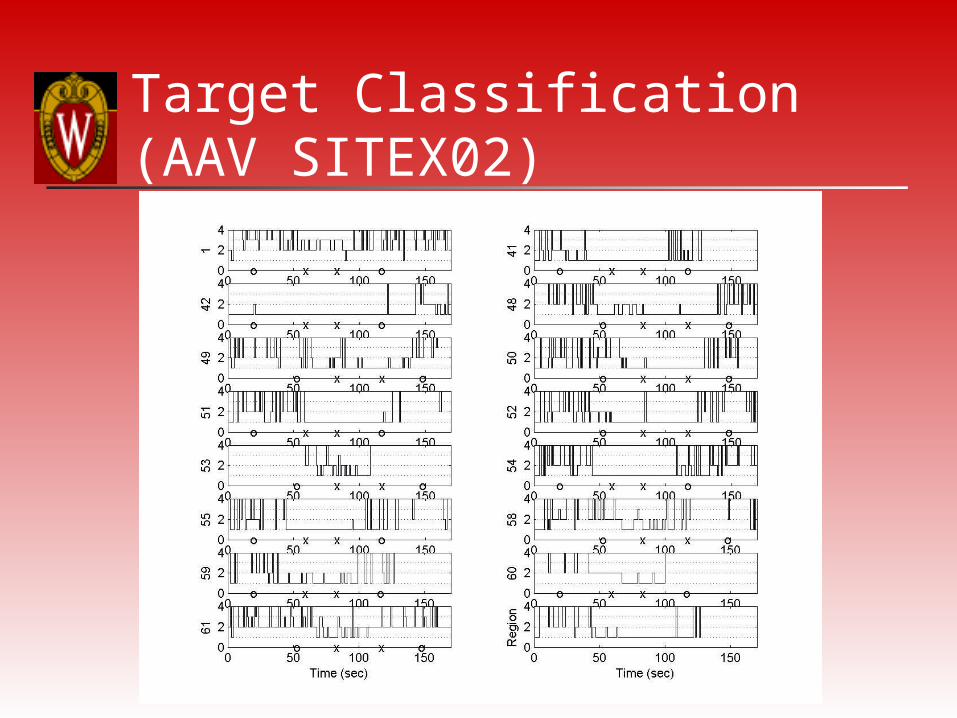
Target Classification
At each node: Maximum Likelihood
classifier using Gaussian model for the classes
Training done using SITEX02 data
Acoustic modality only
Decisions as AAV, DW, HMMWV, or Unknown
Within a region: Nodal classification
decisions sent to manager nodes.
Manager nodes fuse nodal decisions into regional decision.
Target type with most votes becomes “winner”.
Target Localization
2
1
1
||
||)(
E
E
rr
rrr i
ii
)(maxarg* rr i
PIR Modality Estimate target to be
at the projection from a detecting node onto the road.
PIR Localizations occur infrequently as compared to acoustic.
PIR localizations are less susceptible to noise.
Acoustic Modality Energy based
localization Let Ei be the energy
reading at sensor node i located at ri.
Estimate target to be at a location where
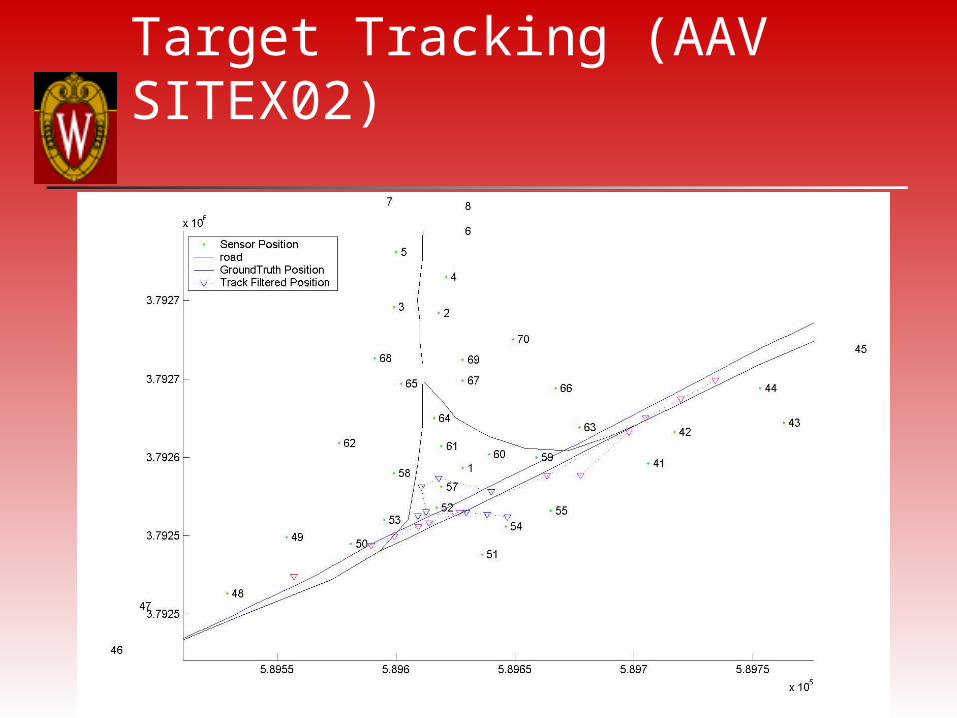
Target Tracking and Prediction
Tracker is based on Kalman Filter.
Tracker assigns different weights to acoustic and PIR localization estimates.
Tracker provides feedback to acoustic based localization in terms of better refined search area.
Tracker predicts location of target in the near future.
Tracker predictions are used to create and activate additional regions for possible target detection.

UW-Senware
UW-Routing
RF Modem Library
Base Thread DLT Thread
UW-APITimeseriesRepository
FantasticData
Data Acquisition
Display GUI
Data Logger
RF Modem RF Modem
(Sensoria)
(BBN)
(BAE)
(Virginia Tech)
(U Maryland)

Case Studies on Two Testbeds
Single vehicle (AAV, DW, HMMWV) traversing SITEX02 sensor field SITEX02 timeseries collected in 29 Palms,
CA. on Nov 14, 2002
Two vehicles (AAV and DW) crossing each other in Waltham sensor field Synthetic timeseries based on SITEX02 data
Two vehicle (AAV and DW) meeting each other and turning back in Waltham sensor field Synthetic timeseries based on SITEX02 data

Control vs Payload Messages (AAV run SITEX02)
0
200
400
600
800
1000
1200
1400
88-byte messages
1 41 42 48 49 50 51 52 53 54 55 58 59 60 61
Node ID
Control vs. Payload message counts
Control
Payload
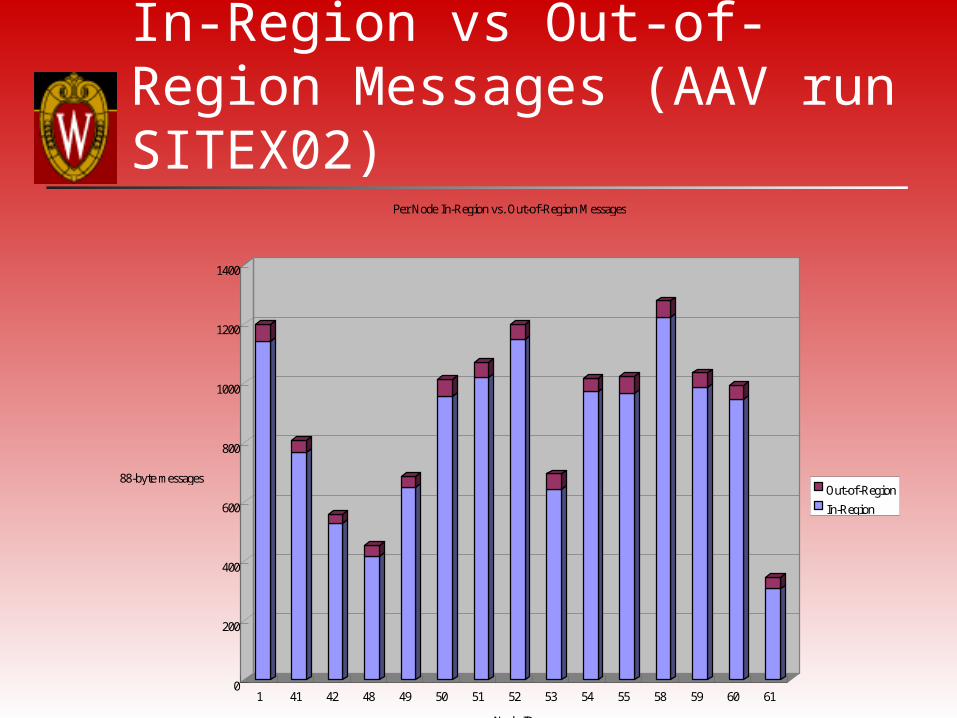
In-Region vs Out-of-Region Messages (AAV run SITEX02)
0
200
400
600
800
1000
1200
1400
88-byte messages
1 41 42 48 49 50 51 52 53 54 55 58 59 60 61
Node ID
Per Node In-Region vs. Out-of-Region Messages
Out-of-Region
In-Region
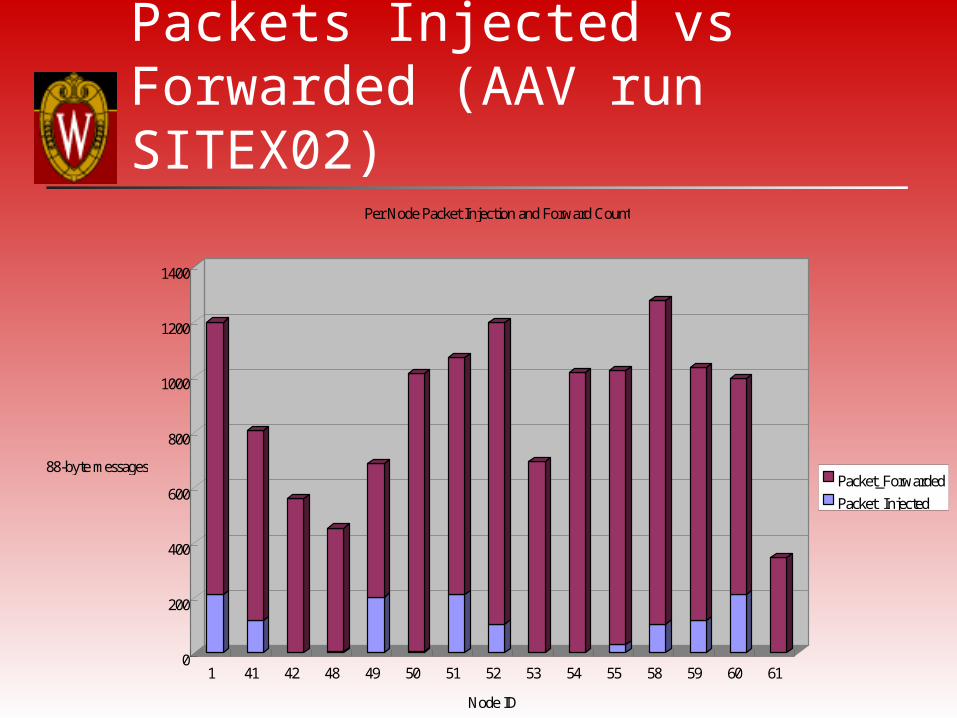
Packets Injected vs Forwarded (AAV run SITEX02)
0
200
400
600
800
1000
1200
1400
88-byte messages
1 41 42 48 49 50 51 52 53 54 55 58 59 60 61
Node ID
Per Node Packet Injection and Forward Count
Packet_Forwarded
Packet_Injected

Per Node Bandwidth Consumed (AAV run SITEX02)
Per Node Bandwidth Consumption vs. Time
0
200
400
600
800
1000
1200
1400
1600
86260 86280 86300 86320 86340 86360 86380
Time (sec)
Ban
dwid
th (B
ytes
per
sec
)
Bandwidth
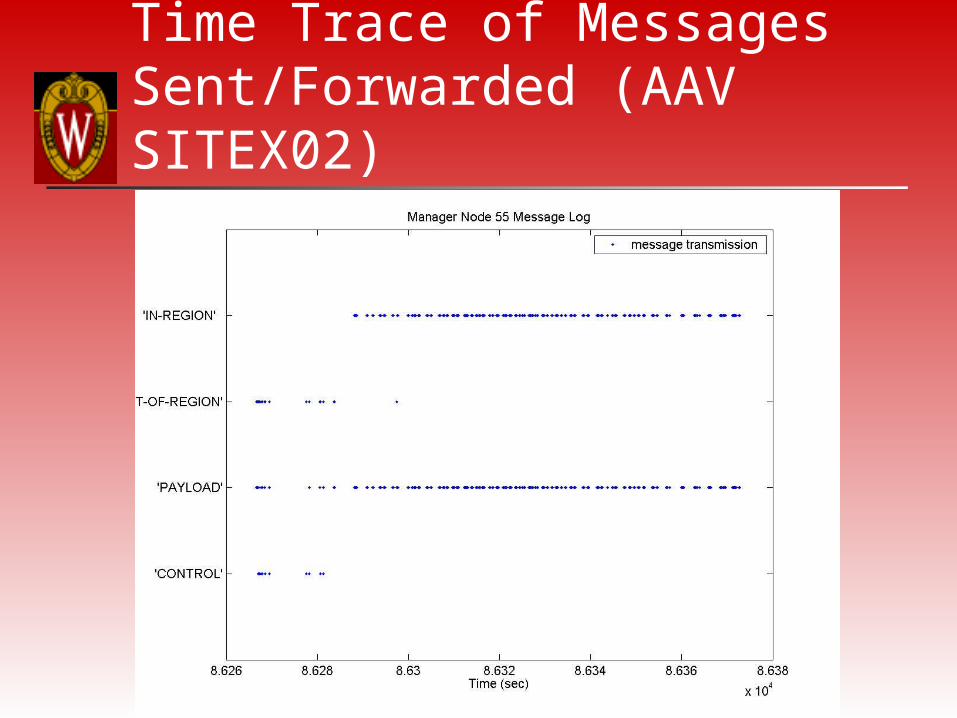
Time Trace of Messages Sent/Forwarded (AAV SITEX02)
Target Detection(AAV SITEX02)
Target Classification(AAV SITEX02)
Target Tracking (AAV SITEX02)

Publications (1 of 2)
R. Brooks, P. Ramanathan, and A. Sayeed, “Distributed target classification and tracking in sensor networks,” Submitted to IEEE Proceedings.
P. Ramanathan, K. K. Saluja, and Y.-H. Hu, “Collaborative sensor signal processing for target detection, localization, and tracking, To appear in Army Sciences Conferecens, December 2002.
T. Clouqueur, V. Phipatansuphorn, P. Ramanathan, and K. K. Saluja, “Sensor deployment strategy for target detection”, Workshop on Sensor Networks and Applications, September 2002.
A. D’Costa, Y.-H. Hu, and A. M. Sayeed, “Classification of targets using multiple sensing modalities in distributed micro-sensor networks, Submitted for publication.
V. Phipatansuphorn and P. Ramanathan, “Vulnerability of sensor networks to unauthorized traversal and monitoring,” Submitted to IEEE Transactions on Computers, April 2002.

Publications (2 of 2)
T. Clouqueur, K. K. Saluja, and P. Ramanathan, “Fault tolerance in collaborative sensor networks for target detection,” Submitted to IEEE Transactions on Computers, April 2002.
D. Li and Y.-H. Hu, “Energy based collaborative source localization using acoustic microsensor array,” Submitted for publication, February 2002.
D. Li, K. Wong, Y.-H. Hu, and A. Sayeed, “Detection, classification, and tracking of targets,” IEEE Signal Processing Magazine, March 2002.
K.-C. Wang and P. Ramanathan, “Multiuser receiver aware multicast in CDMA-based multihop wireless networks,” in Proceedings of Mobihoc, pp. 291-294, October 2001.
T. Clouqueur, P. Ramanathan, K. K. Saluja, and K.-C. Wang, “Value-fusion versus decision-fusion for fault-tolerance in collaborative target detection in sensor networks,” in Proceedings of Fourth International Conference on Information Fusion, August 2001.





























