Embed Size (px)
Citation preview

HAL Id: hal-00077966https://hal.archives-ouvertes.fr/hal-00077966
Submitted on 1 Jun 2006
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Local dynamics and primitive path analysis for a modelpolymer melt near a surface
Mihail Vladkov, J.-L. Barrat
To cite this version:Mihail Vladkov, J.-L. Barrat. Local dynamics and primitive path analysis for a model polymer meltnear a surface. 2006. <hal-00077966>

ccsd
-000
7796
6, v
ersi
on 1
- 1
Jun
200
6
Local dynamics and primitive path analysis for a model
polymer melt near a surface
Mihail Vladkov∗, Jean-Louis Barrat1
1 Laboratoire de Physique de la Matiere Condensee et Nanostructures Universite Lyon 1;
CNRS; UMR 5586 Domaine Scientifique de la Doua F-69622 Villeurbanne cedex; France
(Dated: June 2, 2006)
Abstract
Using molecular dynamics simulations, we apply primitive path and local Rouse modes anal-
ysis to study the chains conformations and the local dynamics and viscosity of a model polymer
melt near a flat repulsive wall and a repulsive wall presenting some bonding sites. The presence
of a repulsive wall leads to acceleration of the dynamics both for unentangled and weakly entan-
gled melts and to a depletion in the entanglement density in the wall vicinity. When the surface
bears grafted chains, we show that the melt chains are accelerated in the unentangled regime
and slowed down in the entangled regime. By analyzing the primitive paths we show that the
observed slowdown in presence of grafted chains is due to an increase in the entanglement density
in the interfacial layer. In contrast, for a plain repulsive surface we observe a depletion of the
entanglements at the interface. The presence of a relatively small density of grafting sites thus
leads to improved mechanical properties (reinforcement) and decreases locally the entanglement
length even if the surface is repulsive.
PACS numbers: 83.10Mj,61.25Hq,83.50Ax
∗ To whom correspondence should be addressed. E-mail: [email protected]
1

I. INTRODUCTION
Nanocomposite polymer based materials have many interesting properties leading to
their extensive usage in practical applications. It has been long known that adding filler
particles to a polymer melt can lead to substantial modifications in its mechanical proper-
ties. The properties of polymer-filler composites are often associated with filler clustering
and percolation [1, 2] but several studies over the past several years showed that the
effect is also observable below the percolation threshold [3, 4]. This indicates that the
particle-matrix interface is another crucial ingredient in the complex physics of filled elas-
tomers. Another indication of the importance of surface effects lies in the fact that small
size particles (nanoparticles) have a much greater effect compared to micron size fillers.
The nature of the polymer filler interactions was shown to be very important, it was
established by experiment [5] and simulation [6] that attractive interactions lead to an
increase of the glass transition temperature near the interface. With this argument re-
inforcement can be partly explained by formation of “harder”, glassy layers with slow
dynamics around attractive fillers. Most of the fillers used in practical applications (tires)
and leading to substantial reinforcement, such as treated silica particles, exhibit a globally
repulsive interface presenting some sites that can covalently bond polymer chains from
the melt. The physics of reinforcement on the interface in this case remain unclear at
a microscopic scale. Experimental studies [3] suggested that chain entanglements in the
surface vicinity should play a major role in the reinforcement and it can be explained by
the presence of trapped entanglements near the interface. Theoretical studies in the past
qualitatively suggested that the density of entanglements should decrease in the vicinity
of a wall [8, 9] because of the average decrease in chain dimensions established earlier
by simulation [10, 11]. On the experimental side the validity of this assumption was re-
cently questioned for free standing films [7], but direct evidence of this phenomenon near
a repulsive wall is still lacking, and it could not be related to mechanical properties.
Recent advances in molecular simulation has made possible a precise study of these
problems. The well established concept of entanglement in a polymer melt could be
“observed” by direct primitive path analysis of a polymer melt [12, 13]. We recently
2

developed an equilibrium method for studying the mechanical properties of a melt that
can be used to assess local viscoelastic properties [14]. Using these methods we analyze
the dynamics and the entanglement density of a polymer melt near a repulsive wall with or
without bonding sites and give a generic explanation of the melt slowdown or acceleration
at the interface as a function of molecular weight.
The systems under study are briefly described in the next section. We then discuss the
local dynamics of the melt in terms of the Rouse modes of the chains for unentangled and
weakly entangled melts. Finally, we study the structure of primitive paths in the vicinity
of the wall, in order to explain the observed dynamical behavior.
II. SYSTEM DESCRIPTION AND METHODS
A. Model
The chains are modelled by an abstract and generic, though well studied, bead spring
model - the rather common ”Lennard-Jones + FENE” model[15]. All monomers in the
system are interacting through the Lennard-Jones potential:
Ulj(r) =
{
4ε((σ/r)12 − (σ/r)6), r ≤ rc
0, r > rc
(1)
where rc = 2.5σ. Neighboring monomers in the same chain are linked by the FENE
(Finite extension non-linear elastic) potential:
UFENE(r) =k
2R0 ln(1 − (
r
R0
)2), r < R0 (2)
where R0 = 1.5σ and k = 30.0ε/σ2.
The temperature of the melt was fixed in all simulations at kBT = 1, well above the
glass transition temperature for our model. We studied systems of chain length of 10, 20,
50 and 100 beads with a total number of beads ranging from 6400 to 51200. This allows
us to investigate the crossover into the weakly entangled regime, with an entanglement
mass Ne estimated for this model in the vicinity of 50[12]. The melt was confined between
walls in the z direction with Lz > 5Rg in all cases. The interaction between the wall and
3

the beads was chosen to crudely reproduce the PE - silica interaction. The bead diameter
was mapped through the polymer C∞ ratio [16] to give σ ∼ 8A. We apply a mixing
rule using values for the PE and silica interaction intensity found in the literature [17] to
obtain a Lennard-Jones potential between the polymer and the wall of σwall = 0.6875σ
and εwall = 0.82ε. The potential is cut off at its minimum 21/6σwall so that it is purely
repulsive, as expected for the interaction between PE and an untreated silica surface. The
wall is represented either by a flat potential or by the 111 surface of an FCC lattice made
of spherical particles, supplemented by a flat repulsive potential in the second layer, that
prevents beads from escaping. For each chain length two systems were prepared: one
with a purely repulsive wall and one with chemisorbing sites on the wall, where grafted
chains are anchored. Silica surface treatment consists in introducing very short chain
molecules on the surface that covalently bond with some sites on the surface on one side
and with monomers on the other side. The number of bonding sites in the simulation
was calculated assuming that 4% of the silica molecules covering the surface of the wall
are active and react with the bonding molecule.[17] The surface density of active sites is
therefore 0.2σ−2. The resulting bond between a wall particle and a coarse grained bead
is thus a soft entropic spring of finite length of the order of several chemical units that is
modelled by an non-harmonic spring:
Ubond =εbond(r − r0)
2
[λ2 − (r − r0)2](3)
The spring constant was set to εbond = 32kBT = 1.5, the equilibrium distance and the
finite extension length are set to r0 = λ = 0.8σ. These parameters define a soft spring
freely fluctuating with ambient temperature that cannot extend further than 1.6σ away
from the surface. All the simulations were performed using the LAMMPS code [20].
B. System Preparation and Static Properties
At first a pure polymer melt was confined at a given pressure (around 0−0.8 depending
on the system) between two repulsive walls. Pressure is monitored by calculating the
normal force on the walls. Then, in order to obtain the system with grafted chains from
4
this initial configuration, a new bond is created between each active wall site and the
closest monomer of the melt. Only one bond per active wall site is allowed while a
monomer can be bonded to several wall atoms as it is a coarse-grained bead representing
several chemical units (1bead ∼ 6CH2). There is no preferential bonding for end or
middle monomers. The new system is now equilibrated at the same pressure as the
original system, its pressure being calculated via the force on the wall and the grafted
chains. All systems were equilibrated for 106 (N = 10) to 107 (N = 100) time steps before
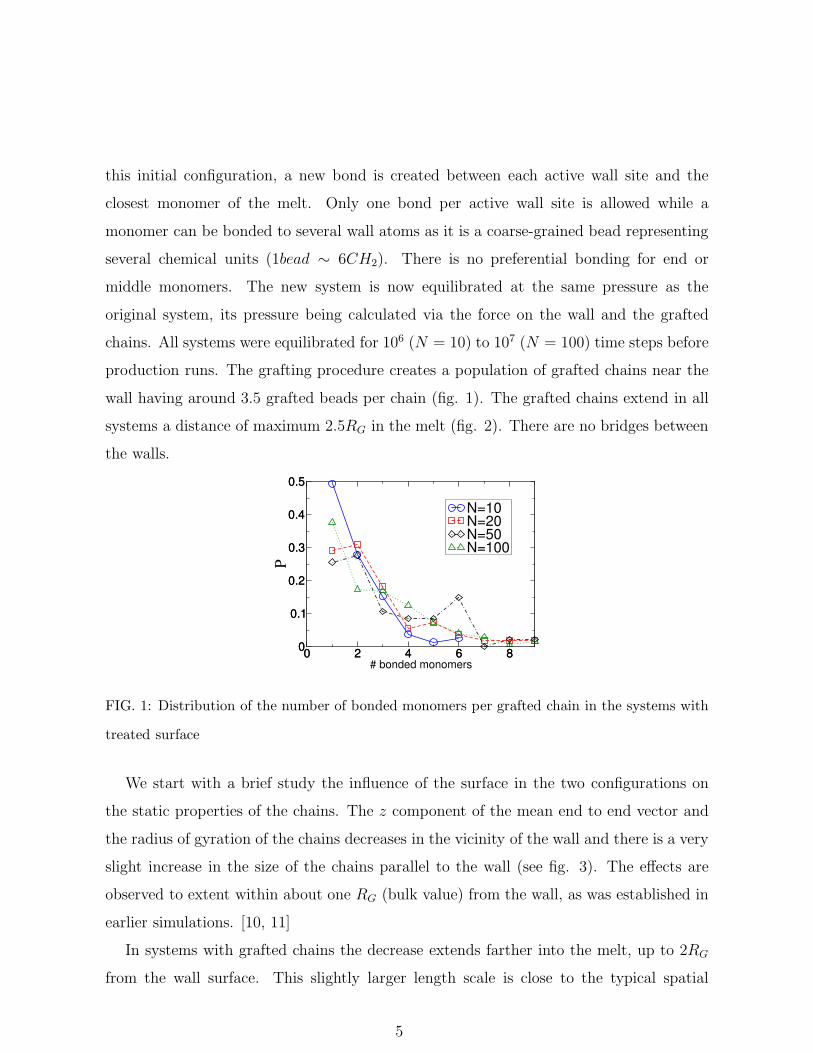
production runs. The grafting procedure creates a population of grafted chains near the
wall having around 3.5 grafted beads per chain (fig. 1). The grafted chains extend in all
systems a distance of maximum 2.5RG in the melt (fig. 2). There are no bridges between
the walls.
FIG. 1: Distribution of the number of bonded monomers per grafted chain in the systems with
treated surface
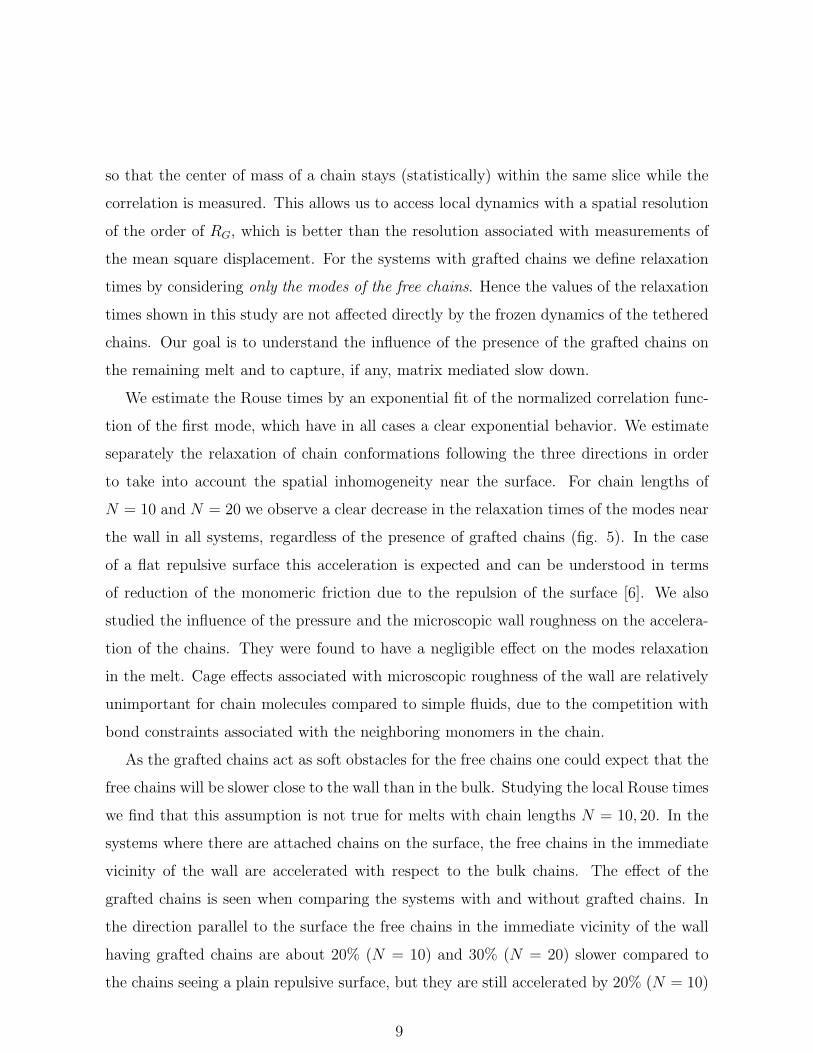
We start with a brief study the influence of the surface in the two configurations on
the static properties of the chains. The z component of the mean end to end vector and
the radius of gyration of the chains decreases in the vicinity of the wall and there is a very
slight increase in the size of the chains parallel to the wall (see fig. 3). The effects are
observed to extent within about one RG (bulk value) from the wall, as was established in
earlier simulations. [10, 11]
In systems with grafted chains the decrease extends farther into the melt, up to 2RG
from the wall surface. This slightly larger length scale is close to the typical spatial
5
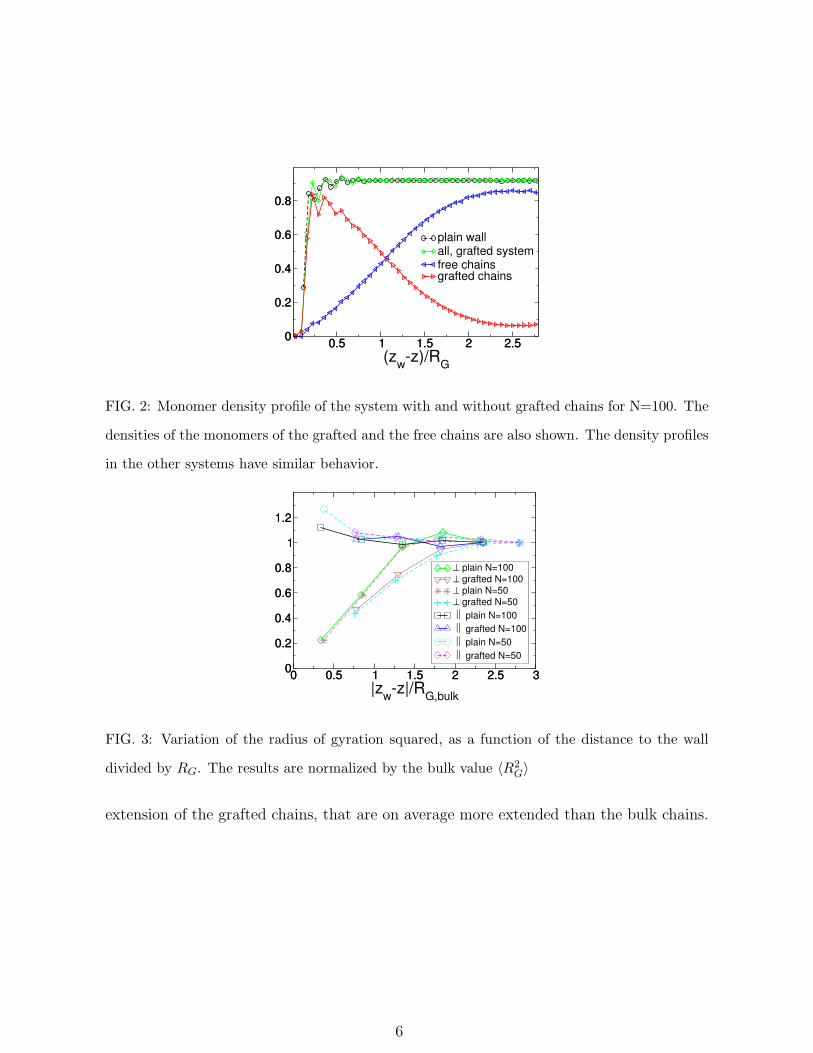
FIG. 2: Monomer density profile of the system with and without grafted chains for N=100. The
densities of the monomers of the grafted and the free chains are also shown. The density profiles
in the other systems have similar behavior.
FIG. 3: Variation of the radius of gyration squared, as a function of the distance to the wall
divided by RG. The results are normalized by the bulk value 〈R2G〉
extension of the grafted chains, that are on average more extended than the bulk chains.
6

III. LOCAL DYNAMICS AND VISCOSITY OF POLYMER CHAINS
A. Desorption and Mean Square Displacement
We can get a qualitative idea of the melt dynamics in the bulk and near the surface
by looking at the local mean square displacement of the polymer chains. We define the
bulk and surface chains mean square displacement by:
〈R2(τ)〉bulk =1
TN zch
∫
dt∑
i; −1<Zicm(t)<1
(Ri(t + τ) − Ri(t))2 (4)
〈R2(τ)〉wall =1
TN zch
∫
dt∑
i; zw−2<|Zicm(t)|<zw
(Ri(t + τ) − Ri(t))2 (5)
In the case of a plain surface we find that surface chains have increased mobility parallel
to the surface in the x and y direction compared to bulk chains and they are slowed down
perpendicular to the surface. For a wall with grafted chains the free chains in the wall
vicinity are slower in the parallel direction (fig. 4) - this is attributed to the presence of
the grafted chains acting as obstacles for motion parallel to the wall.
FIG. 4: Monomer mean square displacement in the wall vicinity for the system N = 20 with
and without grafted chains.
A more surprising result is that, in the presence of grafted chains, the free chains are
faster than the chains near a plain wall in the perpendicular direction (fig. 4). This kind
of behavior can be understood knowing the desorption mechanism from a flat surface
7

[18]. We know that, even in the case of a flat repulsive wall, surface chains having relaxed
conformations with many monomers on the surface are very slow to desorb and are thus
responsible for a slow down in dynamics near the surface. This is seen in the perpendicular
slowdown in the plain wall system. In the presence of grafted chains, there are less fully
relaxed free chains near the surface, as the corresponding conformations are achieved by
the grafted chains that do not desorb. The presence of grafted chains makes the surface
rough on a scale comparable to the polymer size, it can be argued that adsorption and
desorption on a rough surface for polymers is faster as it involves less entropy loss than
in the case of a flat wall [19]. Thus the free chains population near the surface has faster
exchange dynamics with the bulk chains.
B. Rouse Modes
We study the local dynamics of the polymer chains by monitoring the relaxation of
the Rouse modes of the chains:
Xp(t) =1
N
N∑
n=1
rn(t) cos
(
(n − 1/2)pπ
N
)
, p = 0, . . . , N − 1 (6)
with N the chain length and rn(t) - the position of the n-th monomer in the chain at the
time t. The correlation of the p-th Rouse mode describes the relaxation of a subchain
of N/p monomers, so that the study of this single chain quantity allows to probe the
dynamics on different length scales. Being a local single chain quantity, the correlation
of the Rouse modes allows us to investigate the dynamics in different sub-volumes of a
non-homogeneous system, provided they contain a large enough number of chains. It is
also a route to calculate the local viscosity in each region, as discussed in ref. [14]. In our
confined systems, we define the local modes relaxation as a function of the z coordinate
as:
〈X(τ)X(0)〉(z) =1
TN zch
∫
dt∑
i; z−dz<Zicm(t)<z+dz
Xi(t + τ)Xi(t) (7)
It is expected that the slowest Rouse modes relaxes on a time scale smaller than the time
needed for a chain to diffuse its own size. Hence, we choose a slice width of the order of RG,
8
so that the center of mass of a chain stays (statistically) within the same slice while the
correlation is measured. This allows us to access local dynamics with a spatial resolution
of the order of RG, which is better than the resolution associated with measurements of
the mean square displacement. For the systems with grafted chains we define relaxation
times by considering only the modes of the free chains. Hence the values of the relaxation
times shown in this study are not affected directly by the frozen dynamics of the tethered
chains. Our goal is to understand the influence of the presence of the grafted chains on
the remaining melt and to capture, if any, matrix mediated slow down.
We estimate the Rouse times by an exponential fit of the normalized correlation func-
tion of the first mode, which have in all cases a clear exponential behavior. We estimate
separately the relaxation of chain conformations following the three directions in order
to take into account the spatial inhomogeneity near the surface. For chain lengths of
N = 10 and N = 20 we observe a clear decrease in the relaxation times of the modes near
the wall in all systems, regardless of the presence of grafted chains (fig. 5). In the case
of a flat repulsive surface this acceleration is expected and can be understood in terms
of reduction of the monomeric friction due to the repulsion of the surface [6]. We also
studied the influence of the pressure and the microscopic wall roughness on the accelera-
tion of the chains. They were found to have a negligible effect on the modes relaxation
in the melt. Cage effects associated with microscopic roughness of the wall are relatively
unimportant for chain molecules compared to simple fluids, due to the competition with
bond constraints associated with the neighboring monomers in the chain.
As the grafted chains act as soft obstacles for the free chains one could expect that the
free chains will be slower close to the wall than in the bulk. Studying the local Rouse times
we find that this assumption is not true for melts with chain lengths N = 10, 20. In the
systems where there are attached chains on the surface, the free chains in the immediate
vicinity of the wall are accelerated with respect to the bulk chains. The effect of the
grafted chains is seen when comparing the systems with and without grafted chains. In
the direction parallel to the surface the free chains in the immediate vicinity of the wall
having grafted chains are about 20% (N = 10) and 30% (N = 20) slower compared to
the chains seeing a plain repulsive surface, but they are still accelerated by 20% (N = 10)
9

and 10% (N = 20) compared to the bulk dynamics (see fig. 5). In the perpendicular
direction the chain conformations equilibrate in about the same time for the two types of
systems. For these systems of short chains, the slowing down due to the grafted chains
is not sufficient to overcome the acceleration due to the repulsive surface and we do not
expect reinforcement with respect to the bulk properties of the material, as discussed in
the next section.
FIG. 5: Local Rouse times normalized by the bulk value for chain lengths of 10 and 20 and for
the free chains in the systems with grafted chains (referred to as “grafted”) and for the chains
in the system without grafted chains (referred to as “plain”).
For chain lengths N > 20 we measure the modes relaxation times as the integral of
the normalized correlation function so that an exponential behavior of the latter is not
required. Although the relaxation is not strictly exponential, the resulting values are
close to those that would be obtained using an exponential fit. For chain lengths around
and above the entanglement length we observe an acceleration for the first Rouse mode
in the case of a plain wall, very similar to the case of short chains. The influence of
grafted chains, however, is much more important than for short chains. In the systems
with grafted chains of N = 50, 100, we measure a slowing down for the largest relaxation
time in the parallel direction (of around 10% for N = 50 and 40% for N = 100 within a
distance of RG from the wall) with respect to the dynamics in the middle of the film (see
fig. 6). The average relaxation times in the layer feeling the presence of the grafted chains
are larger than those for the system without grafted chains. On average, for N = 100,
10

the mean relaxation times of the first five Rouse modes are increased by ∼ 20% in the
presence of grafted chains, compared to what is observed for a plain wall (see fig. 7). In
summary, the presence of grafted chains induces a slowing down for all modes (compared
to the plain wall case), and in the case of the first mode a slowing down compared to the
bulk is also observed.
FIG. 6: Local Rouse times (first mode), normalized by the bulk value, for chain lengths of 50
and 100 and systems with and without grafted chains.
FIG. 7: Local relaxation times of the first five Rouse modes for chain length of 100 for the
systems with and without grafted chains. The system without grafted chains is systematically
the faster one.
In the z direction the conformation dynamics varies in a similar way as a function of
the distance to the surface, regardless of the presence of grafted chains.
11
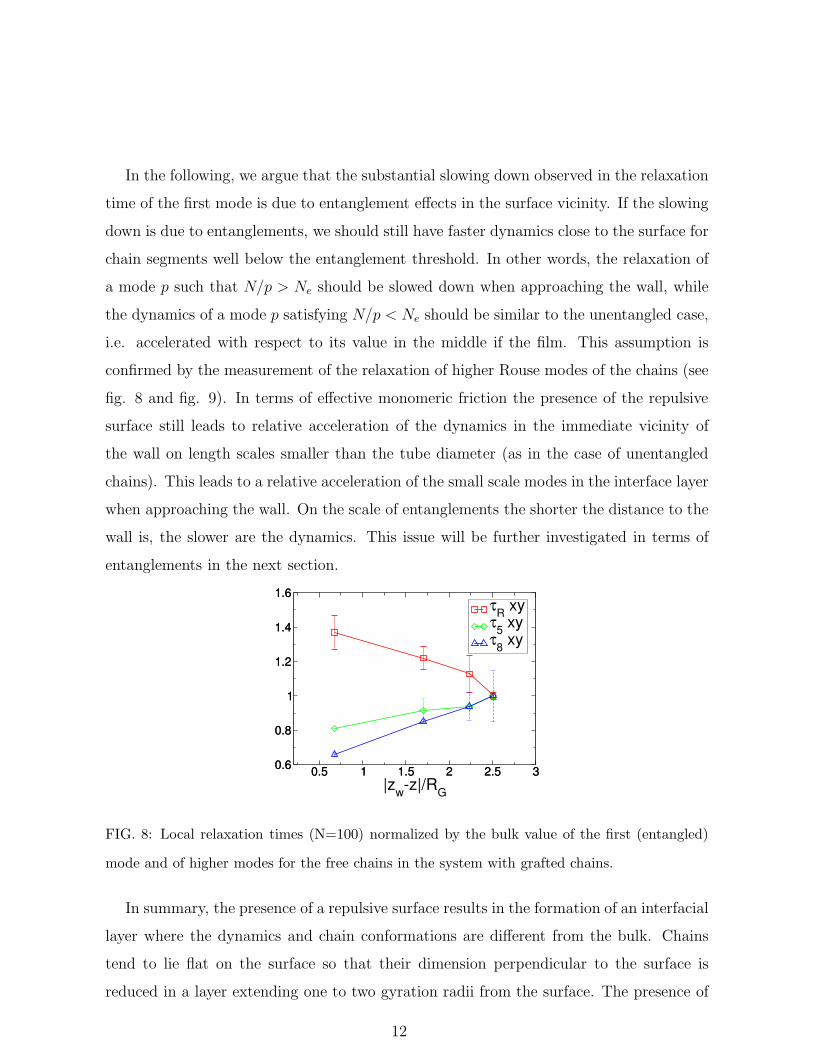
In the following, we argue that the substantial slowing down observed in the relaxation
time of the first mode is due to entanglement effects in the surface vicinity. If the slowing
down is due to entanglements, we should still have faster dynamics close to the surface for
chain segments well below the entanglement threshold. In other words, the relaxation of
a mode p such that N/p > Ne should be slowed down when approaching the wall, while
the dynamics of a mode p satisfying N/p < Ne should be similar to the unentangled case,
i.e. accelerated with respect to its value in the middle if the film. This assumption is
confirmed by the measurement of the relaxation of higher Rouse modes of the chains (see
fig. 8 and fig. 9). In terms of effective monomeric friction the presence of the repulsive
surface still leads to relative acceleration of the dynamics in the immediate vicinity of
the wall on length scales smaller than the tube diameter (as in the case of unentangled
chains). This leads to a relative acceleration of the small scale modes in the interface layer
when approaching the wall. On the scale of entanglements the shorter the distance to the
wall is, the slower are the dynamics. This issue will be further investigated in terms of
entanglements in the next section.
FIG. 8: Local relaxation times (N=100) normalized by the bulk value of the first (entangled)
mode and of higher modes for the free chains in the system with grafted chains.
In summary, the presence of a repulsive surface results in the formation of an interfacial
layer where the dynamics and chain conformations are different from the bulk. Chains
tend to lie flat on the surface so that their dimension perpendicular to the surface is
reduced in a layer extending one to two gyration radii from the surface. The presence of
12
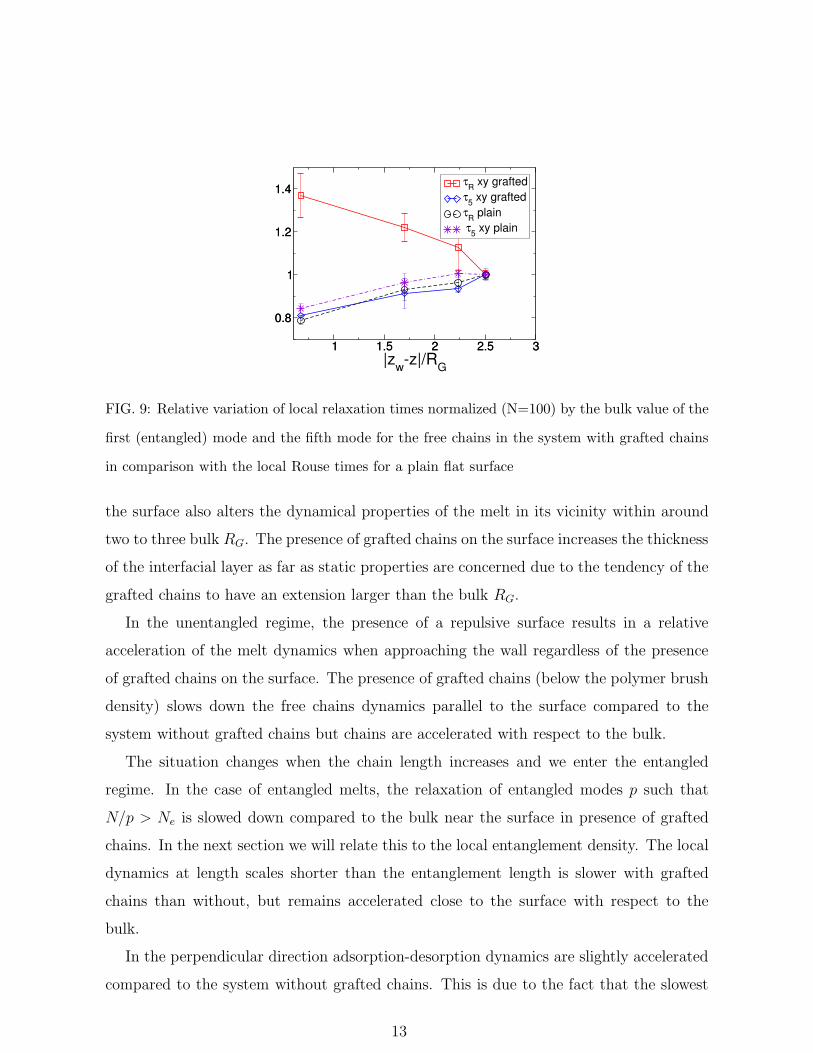
FIG. 9: Relative variation of local relaxation times normalized (N=100) by the bulk value of the
first (entangled) mode and the fifth mode for the free chains in the system with grafted chains
in comparison with the local Rouse times for a plain flat surface
the surface also alters the dynamical properties of the melt in its vicinity within around
two to three bulk RG. The presence of grafted chains on the surface increases the thickness
of the interfacial layer as far as static properties are concerned due to the tendency of the
grafted chains to have an extension larger than the bulk RG.
In the unentangled regime, the presence of a repulsive surface results in a relative
acceleration of the melt dynamics when approaching the wall regardless of the presence
of grafted chains on the surface. The presence of grafted chains (below the polymer brush
density) slows down the free chains dynamics parallel to the surface compared to the
system without grafted chains but chains are accelerated with respect to the bulk.
The situation changes when the chain length increases and we enter the entangled
regime. In the case of entangled melts, the relaxation of entangled modes p such that
N/p > Ne is slowed down compared to the bulk near the surface in presence of grafted
chains. In the next section we will relate this to the local entanglement density. The local
dynamics at length scales shorter than the entanglement length is slower with grafted
chains than without, but remains accelerated close to the surface with respect to the
bulk.
In the perpendicular direction adsorption-desorption dynamics are slightly accelerated
compared to the system without grafted chains. This is due to the fact that the slowest
13
chains in the vicinity of a flat wall tend to be those with most contacts with the wall [18].
In the grafting process, these chains are removed from the population of ”free” chains
that we consider here.
C. Local Viscosity
Next we measure the local viscosity in our systems using the method discussed in ref.
[14]. Each mode p of the chains has a contribution to the stress auto correlation function:
Gp(t) =ρkBT
N
〈Xpα(t)Xpβ(t)Xpα(0)Xpβ(0)〉(
〈X2pα〉+〈X2
pβ〉
2
)2 (8)
where α, β = x, y, z. The mode contribution to the viscosity of the mode is ηp =∫ ∞
0Gp(t)dt and the total viscosity is given by η = ηp=1 + ... + ηp=N−1. For chain lengths
of N = 10 and N = 20 the viscosity is estimated from all the Rouse modes and for chains
of N = 50 and N = 100 only the first ten modes were considered. The contribution of
the eleventh mode for N ≥ 50 was found to be less than 1% of the contribution of the
first mode. The contribution of the non polymeric stress (associated with short range
interactions between monomers rather than with chain connectivity) on very short time
scales was neglected. While this leads to an underestimate of the viscosity of the order of
20% in the unentangled regime, this contribution is negligible (< 1%) for longer chains
as discussed in [14]. The average local viscosity is shown in fig. 10. For chains of length
N = 100, the grafting induces an increase in the local viscosity in a range of around 2RG
from the wall, as could be expected from the increase in the relaxation times. A smaller
increase in a layer of RG is observed for the chains around the entanglement threshold
(N = 50). For unentangled melts, there is essentially no difference between the results
with and without grafted chains.
IV. PRIMITIVE PATH ANALYSIS
In order to interpret the slowing down in the dynamics for entangled systems in the
presence of grafted chains, we perform a local primitive path analysis following the algo-
14

FIG. 10: Local viscosity for the different systems. The values are calculated as the mean of the
three components xy, xz and yz of the viscosity and error bars indicate the dispersion around
the mean value.
rithm discussed in ref. [13]. Starting from independent initial states separated by more
than a chain relaxation time, the chain ends are kept fixed, while the intra chain pair
interactions are switched off and the bond length is reduced to zero while increasing the
bond tension to k = 100. In the systems with grafted chains the grafting bonds are
maintained, the primitive path quench is applied to all the chains and the parameters of
the primitive paths are measured for the free chains only as in the previous section. We
measure locally, as a function of the distance to the surface, the length of the primitive
paths (Lpp). If no entanglements exist between the chains the length of their primitive
paths should be equal or very close to their end-to-end distance. The presence of en-
tanglements leads to primitive paths longer than the end-to-end distance with a typical
Kuhn length app = 〈R2〉/Lpp and an average bond length bpp = Lpp/N , which are related
to the entanglement length [12]. Thus the entanglement length is given by:
Ne =app
bpp=
N〈R2〉
L2pp
(9)
and the average number of entanglements per chain is Lpp
app−1. For chain lengths of 10 and
20 the primitive path analysis shows that we are in the unentangled regime as expected
(with 0.1 entanglements per chain for N = 20). For N = 50 the melt is closer but still
under the entanglement threshold with 0.5 entanglements per chain. For a chain length
15

of 100 there are already 1.1 entanglements per chain and the system is weakly entangled.
As expected in the unentangled case (fig. 11), the behavior in terms of primitive paths
of the free chains in the system with and without grafted chains is identical. There is
a slight decrease of the primitive path length close to the surface that is related to the
decrease in the dimensions of chains lying flat on the surface. A noticeable difference is
seen in the entangled case where the ratio Lpp/Ree becomes larger for the free chains near
the surface bearing tethered chains, while it decreases with respect to the bulk value for
the plain wall system.
FIG. 11: Local ratio of the primitive path length to the end-to-end chain distance in the different
systems.
Measuring separately the primitive path length and the end-to-end distance in the
systems of N = 100 (see fig. 12) we see that in the presence of grafted chains on the
surface the length of the primitive paths of the free chains remains essentially constant
throughout the boundary layer, while it is decreased in the presence of a plain wall. A the
same time there is a slightly more pronounced decrease in the end-to-end distance for the
system with grafted chains as discussed previously (fig. 3, 12). The grafted chains, being
on average more extended than the free chains provide more entanglements in the plane
parallel to the wall for the chains close to the interface, thus keeping their path length
constant regardless of the fact that the perpendicular size of the chains diminishes leading
to less interpenetration in the z direction. In the case of a plain surface the decrease in
the chains RG results in less interpenetration diminishing the primitive paths.
16

FIG. 12: Local primitive path length and end-to-end distance for N = 100.
FIG. 13: Local entanglement length for the two systems of N = 100. Ne(z) was calculated from
the simulation data using equation 9
These effects can be interpreted in terms of local reduction of the entanglement length
(or, equivalently increase in the entanglement density) as shown in fig. 13. The bulk
entanglement length found (around Ne = 50) is in qualitative agreement with the result of
reference [12]. In a region that extends about one RG from the surface, there is a depletion
of entanglements for a plain repulsive wall, as qualitatively predicted in reference [8]. This
effect was associated with smaller chain size in the z direction. It can be also understood
knowing that chains in the immediate vicinity of the wall only have neighboring chains
on one side and no chains to entangle with on the other side, so they have a smaller total
number of entanglements. The difference in entanglement density explains the slowing
down in the dynamics of the entangled modes. Moreover, a quantitative prediction can
17
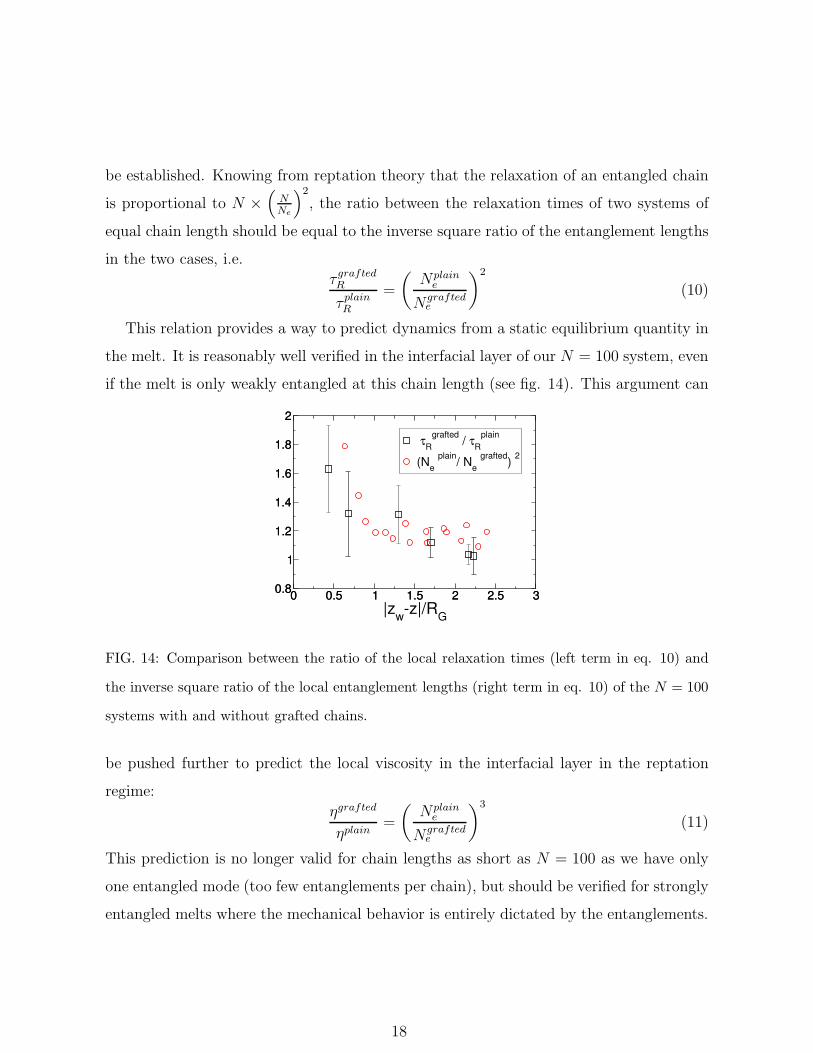
be established. Knowing from reptation theory that the relaxation of an entangled chain
is proportional to N ×(
NNe
)2
, the ratio between the relaxation times of two systems of
equal chain length should be equal to the inverse square ratio of the entanglement lengths
in the two cases, i.e.
τ graftedR
τplainR
=
(
Nplaine
Ngraftede
)2
(10)
This relation provides a way to predict dynamics from a static equilibrium quantity in
the melt. It is reasonably well verified in the interfacial layer of our N = 100 system, even
if the melt is only weakly entangled at this chain length (see fig. 14). This argument can
FIG. 14: Comparison between the ratio of the local relaxation times (left term in eq. 10) and
the inverse square ratio of the local entanglement lengths (right term in eq. 10) of the N = 100
systems with and without grafted chains.
be pushed further to predict the local viscosity in the interfacial layer in the reptation
regime:
ηgrafted
ηplain=
(
Nplaine
Ngraftede
)3
(11)
This prediction is no longer valid for chain lengths as short as N = 100 as we have only
one entangled mode (too few entanglements per chain), but should be verified for strongly
entangled melts where the mechanical behavior is entirely dictated by the entanglements.
18
V. DISCUSSION AND CONCLUSIONS
We presented here a study of the dynamic and static behavior for a polymer melt
at the interface with a repulsive wall and a repulsive wall subject to surface treatment
creating about 20% of chemisorbing sites on the surface. We find that the modifications
in the dynamics due to the surface treatment depends on the level of entanglement of the
melt. In the case of unentangled melts, the dynamics is accelerated compared to the bulk
due to the repulsive surface. The grafted chains locally slow down the dynamics in the
surface plane compared to systems without grafted chains, but the relaxation times are
smaller than in the bulk and there is a local decrease in the viscosity as in the case of a
plain repulsive wall. In the case of weakly entangled melts, the presence of the repulsive
surface induces a decrease (∼ 30− 40%) in the entanglement density in a range of about
RG from the surface. The presence of the grafted chains prevents this depletion of the
entanglements and further reduces the entanglement length in the interfacial layer, in part
due to the smaller chain dimensions. This leads to slower dynamics in the interfacial layer
and a local increase of the relaxation times of the entangled modes near the surface. The
behavior of the relaxation times can be predicted by measuring the local entanglement
length, following the expression given by reptation theory.
Our results are obtained for chains that are only slightly above the entanglement
threshold. We expect however that these conclusions would hold for more entangled melts.
For longer chains the extension of the region where entanglement effects are enhanced by
the grafting will be larger. It is likely that the motion of the chains perpendicular to the
interface will be slowed down as well within this region, as entanglements will also hinder
this type of motion.
We note that the explanation of reinforcement by local variation of the entanglement
length we proposed here is also relevant in a wider range of systems. We considered
a surface with a certain number of infinitely attractive sites, but similar effects can be
expected for a surface with some attractive sites or a globally attractive surface. Thus
the slowdown mediated by the adsorbed, slowest chains plays an important role in the
mechanical properties of nanocomposite polymer based materials.
19
Finally we would like to thank Pr. Ralf Everaers for fruitful discussions concerning the
primitive path analysis and the Region Rhone-Alpes for a grant of computer time on the
CCRT-CEA calculator.
[1] Payne, A.R. J. Appl. Pol. Sci. 1962, 6, 57.
[2] For a recent review see: Oberdisse J. Soft Matter 2006, 2, 29.
[3] Sternstein, S. S.; Zhu, A.-J.; Macromolecules 2002, 35, 7262.
[4] Dalmas F, Chazeau L, Gauthier C, Cavaille JY, Dendievel R.; Polymer 2006, 47 (8),
2802-2812.
[5] Berriot J, Montes H, Lequeux F, Long D, Sotta P Europhys. Lett. 2003, 64, 50.
[6] Baschnagel, J.; Varnik, F.; J. Phys.: Condens. Matter 2005, 17, 851.
[7] Itagaki, H.; Nishimura, Y.; Sagisaka, E.; Grohens, Y.; Langmuir 2006, 22, 742.
[8] Brown, H. R.; Russell, T. P.; Macromolecules 1996, 29, 798.
[9] Oslanec, R.; Brown, H. R.; Macromolecules 2003, 36, 5839.
[10] Wang, J.-S.; Binder, K.; J. Phys. France 1991, 1, 1583.
[11] Kumar, S. K.; Vacatello, M.; Yoon, D. Y.; Macromolecules 1990, 23, 2189.
[12] Everaers, R.; Sukumaran, S. K.; Grest, G. S.; Svaneborg, C.; Sivasubremanian, A.; Kremer,
K.; Science 2004, 203, 823.
[13] Sukumaran, S. K.; Grest, G. S.; Kremer, K.; Everaers, R.; J. Poly. Sci 2005, 43, 917.
[14] Vladkov, M.; Barrat, J.-L.; Macromol. Th. Simu. 2006, 15, 252.
[15] K. Kremer, G. S. Grest,J. Chem. Phys. 1990, 92, 5057.
[16] Flory, P. J.; Statistical Mechanics of Chain Molecules, Interscience, Ney York, 1969.
[17] Nath, S. K.; Frischknecht, A. L.; Curro, J. G.; McCoy, J. D.; Macromolecules 2005, 38,
8562.
[18] Smith, K. A.; Vladkov, M.; Barrat, J.-L.; Macromolecules 2005, 38, 571.
[19] Huber G.; Vilgis, T. A.; Eur. Phys. J. B 1998, 3, 217.
[20] S. J. Plimpton, J. Comp. Phys. 1995, 117, 1. LAMMPS web site:
www.cs.sandia.gov/∼sjplimp/lammps.html
20

















![Polymer Blends Containing Polyaniline Melt-Processed ...meitalz/Articles/C10.pdfOnly a few studies concerning melt processing have been reported [1±8]. Shacklette et al. [1] reported](https://img.dokumen.tips/doc/110x75/5f813e5949af2f4fcc219e76/polymer-blends-containing-polyaniline-melt-processed-meitalzarticlesc10pdf.jpg)











