Embed Size (px)
Citation preview

Linear Motion Servo Plant: AMD-1
Linear Experiment #9:Vibration Control
Active Mass Damper - One Floor(AMD-1)
All of Quanser’s systems have an inherent open architecture design.It should be noted that the following experimental setup, accompanyingfiles, and configuration are merely one of the many possible uses of this
product.
Instructor Manual

Vibration Control Laboratory – Instructor Manual
Table of Contents1. Laboratory Objectives..........................................................................................................12. Purpose of the Instructor Manual.........................................................................................13. Contents...............................................................................................................................14. References............................................................................................................................15. Laboratory Configuration....................................................................................................2
5.1. Wiring and Hardware Setup.........................................................................................25.2. Experiment Design Files..............................................................................................25.3. Matlab File Configuration: setup_lab_amd1.m...........................................................5
5.3.1. File Configuration to Reflect your Hardware Setup.............................................55.3.2. File Configuration to Reflect your Controller Implementation............................6
6. Solutions to the Pre-Lab Assignments.................................................................................86.1. Solution to Assignment #1: Proportional-Velocity (PV) Controller Design...............86.2. Solution to Assignment #2: Linear Equations Of Motion (EOM)...............................96.3. Solution to Assignment #3: State-Space Representation.............................................96.4. Solution to Assignment #4: Full-Order Observer......................................................13
7. Typical In-Lab Results.......................................................................................................147.1. Checking the Actual Controller Gains.......................................................................14
7.1.1. Checking the PV Position Controller Gains: Kp and Kv...................................147.1.2. Checking the State-Feedback Gain Vector: K....................................................157.1.3. Checking the Observer Gain Matrix: G.............................................................16
7.2. Real-Time Implementation Of The AMD-1 Switching-Mode Controller.................178. Possible Lab Extensions....................................................................................................189. Lab Report.........................................................................................................................19
Document Number: 562 ! Revision: 02 ! Page: i

Vibration Control Laboratory – Instructor Manual
1. Laboratory ObjectivesThe purpose of the AMD-1 experiment is to design and implement an observer-based state-feedback controller that dampens out the vibrations in the AMD-1 flexible structure bydriving the active mass (i.e. linear cart). Moreover, this laboratory also requires the studentto design and implement a Proportional-Velocity (PV) position controller, used for thestructure self-excitation.
2. Purpose of the Instructor ManualThe present manual is an instructor's manual which provides additional informationto the person running the Active Mass Damper – One Floor (AMD-1) - LinearExperiment #9: Vibration Control student laboratory. It comes as a complement ofReference [7]. Therefore, the instructor is assumed fully aware of the content of Reference[7] prior to starting reading this manual. The laboratory instructor is also expected to becompletely familiar with at least References [1], and [2].This document is not intended for the students as it provides solutions to the pre-labassignments and contains typical experimental results from the laboratory procedure.
3. ContentsThis document contains the following:
A list and description of all the computer files accompanying the experiment.How to customize the laboratory design files to your particular configuration.The solutions to the pre-lab assignments questions.Some typical experimental results expected from the laboratory procedure.
4. References[1] Active Mass Damper – One Floor (AMD-1) User Manual.[2] IP01 and IP02 - Linear Experiment #0: Integration with WinCon – Student Handout.[3] IP01 and IP02 User Manual.[4] Data Acquisition Card User Manual.[5] Universal Power Module User Manual.[6] WinCon User Manual.[7] Active Mass Damper – One Floor (AMD-1) - Linear Experiment #9: Vibration Control
– Student Handout.[8] IP01 and IP02 - Linear Experiment #1: PV Position Control – Student Handout.[9] IP01 and IP02 - Linear Experiment #1: PV Position Control – Instructor Manual.[10] Shake Table II Experiment Manual.
Document Number: 562 ! Revision: 02 ! Page: 1

Vibration Control Laboratory – Instructor Manual
5. Laboratory Configuration
5.1. Wiring and Hardware SetupAs also mentioned in Reference [7], please refer to Reference [1] for the setup informationrequired to carry out the present control laboratory. Reference [1] provides thespecifications and a description of the main components composing your system, as well asthe wiring conventions used for the Active Mass Damper � One Floor (AMD-1) plant.
5.2. Experiment Design FilesTable 1, below, lists and describes the various computer files coming with experiment.
File Name DescriptionAMD-1_Student_561.pdf The student handout for the Active Mass Damper
– One Floor (AMD-1) - Linear Experiment #9:Vibration Position Control laboratory. It containspre-lab assignment questions, as well as in-labexperimental procedure and questions.
AMD-1_Instructor_562.pdf The instructor manual for the Active MassDamper – One Floor (AMD-1) - LinearExperiment #9: Vibration Control laboratory. Itcontains information to setup and run the lab, thesolutions to the pre-lab assignment questions, andsome typical experimental results expected fromthe experimental procedure.
AMD-1 Equations.mws Maple worksheet used to analytically derive theEquations of Motion as well as the State-Spacemodel corresponding to the experiment's systemsand controllers design equations. The WaterlooMaple's Maple 8, or later release, is required toopen, modify, and execute this file.
Document Number: 562 ! Revision: 02 ! Page: 2

Vibration Control Laboratory – Instructor Manual
File Name DescriptionAMD-1 Equations.html HTML presentation of the AMD-1 Equations.mws
file. It allows to view the content of the Maple filewithout having Maple 8 installed. Of course inthis case, no modification to the equations can bedone.
AMD1_ABCD_eqns.m Matlab file automatically generated by executingthe AMD-1 Equations.mws Maple worksheet. Itcontains a symbolic representation of the state-space matrices (A, B, C, and D) of the QuanserAMD-1 system.
quanser_tools.mws Executing this worksheet generates the quanserrepository containing the Quanser_Tools package.The two package files are named: quanser.ind andquanser.lib. The Quanser_Tools module definesgeneric procedures used in Lagrangian mechanics.It also contains data processing routines to savethe obtained state-space matrices into a Matlab-readable file.
quanser_tools.rtf Rich Text Format presentation of thequanser_tools.mws file. It allows to view thecontent of the Maple worksheet without havingMaple 8 installed. Of course in this case, nomodification to the described Maple procedurescan be done.
setup_lab_amd1.m Matlab file. It contains the configuration flagsdescribing the user's system. It is the only designfile to execute. It calls the other design files,namely: setup_amd1_parameters.m, andd_amd1.m.
setup_amd1_parameters.m Matlab file. It returns the AMD-1 modelparameters accordingly to the user-configurationset in setup_lab_amd1.m.
Document Number: 562 ! Revision: 02 ! Page: 3

Vibration Control Laboratory – Instructor Manual
File Name Descriptiond_amd1.m Matlab controller design file for the AMD-1
system. It automatically calculates the cart PVcontroller gains satisfying the designspecifications. It also designs, given a desiredpole-placement, the AMD-1's full-state observerand state-feedback law. It can also carry out somesystem analysis.
q_amd1_ZZ.mdl Simulink controller file for the AMD-1 system. Itimplements the real-time observer-based state-feedback closed loop to dampen the vibration ofthe AMD-1's flexible structure. The hardware isconnected to the 'ZZ' data acquisition board. Thename substitutions stood for by 'ZZ' are listed anddescribed in Table 2, below. This file interfaceswith an IP01-based linear cart (i.e. with apotentiometer). The real-time code can begenerated from this controller file and run withWinCon.
q_amd1_e_ZZ.mdl Same file as q_amd1_ZZ.mdl but interfacing to anIP02-based linear cart (i.e. with an encoder).
Table 1 Laboratory Design Files
The possible substitution names stood for by 'ZZ' in the controller design files described inTable 1 are listed below:
'ZZ' Substitution Name Descriptionq8 The corresponding controller file interfaces to the Quanser's Q8
board.mqp The corresponding controller file interfaces to the Quanser's
MultiQ-PCI board.mq3 The corresponding controller file interfaces to the Quanser's
MultiQ-3 board.
nie The corresponding controller file interfaces to the NationalInstruments' E-Series boards.
Table 2 'ZZ' Substitution Names
Document Number: 562 ! Revision: 02 ! Page: 4

Vibration Control Laboratory – Instructor Manual
All the calculations and equations derived in Reference [7] (i.e. the student handout for thislab) and the present manual (i.e. the instructor manual) are entirely carried out in the Mapleworksheet called AMD-1 Equations.mws and provided with this laboratory. Using Maple 8,the worksheet equations can be edited and re-calculated by executing the worksheet.
5.3. Matlab File Configuration: setup_lab_amd1.mPrior to the starting the laboratory with the students, the Matlab filesetup_lab_amd1.m should be manually edited (i.e. configured) to reflect your actual ex-perimental equipment and setup that you have, and the controller design that youwish to implement.
The Matlab script setup_lab_amd1.m initializes all the Matlab workspace variables andsystem parameters required by the Simulink diagrams and for further analysis.Open setup_lab_amd1.m in order to edit it.
5.3.1. File Configuration to Reflect your Hardware SetupIn the setup_lab_amd1.m file, there is a section that must be set according to your labequipment and its hardware configuration. This section is reproduced below:
% ############### USER-DEFINED AMD-1 CONFIGURATION ###############% Type of motorized cart: set to 'IP01', 'IP02'%CART_TYPE = 'IP01';CART_TYPE = 'IP02';% Type of Cart Load: set to 'NO_WEIGHT', 'ONE_WEIGHT', 'TWO_WEIGHT'%CART_LOAD_TYPE = 'NO_WEIGHT';%CART_LOAD_TYPE = 'ONE_WEIGHT';CART_LOAD_TYPE = 'TWO_WEIGHT';% Turn on or off the safety watchdog on the cart position: set it to 1 , or 0 XC_LIM_ENABLE = 1; % safety watchdog turned ON%XC_LIM_ENABLE = 0; % safety watchdog turned OFF% Safety Limits on the cart displacement (m)XC_MAX = 0.08; % cart displacement maximum safety positionXC_MIN = - XC_MAX; % cart displacement minimum safety position% Cable Gain used: set to 1K_CABLE = 1;% Universal Power Module (UPM) Type: set to 'UPM_1503', 'UPM_2405', or 'UPM_1503x2'UPM_TYPE = 'UPM_1503';%UPM_TYPE = 'UPM_2405';%UPM_TYPE = 'UPM_1503x2';% Digital-to-Analog Maximum Voltage (V); for MultiQ cards set to 10
Document Number: 562 ! Revision: 02 ! Page: 5

Vibration Control Laboratory – Instructor Manual
VMAX_DAC = 10;% ############### END OF USER-DEFINED AMD-1 CONFIGURATION ###############
The settings seen above are the default configuration parameters of this experiment. It is upto you, the instructor, to ensure that these settings match the configuration of your actualexperimental setup, as you present it to your students. If you are unsure about yourconfiguration, please refer to References [1], [3], [4], and [5].
Additionally, the two flags XC_MAX and XC_MIN set the safety limits (in meters) of thelinear cart maximum and minimum, respectively, displacements allowed. To enable thissafety watchdog, make sure that the flag XC_LIM_ENABLE is set to 1 (or to 0 to disable it).This utility causes the real-time controller to stop if the cart position exceeds the alloweddisplacement. In case of a design error or an unstable controller, the use of this functionshould prevent your linear cart from running into one of the track's ends and/or creating anydamage.
5.3.2. File Configuration to Reflect your Controller ImplementationFurther in the Matlab script setup_lab_amd1.m, there is a section where the controllerdesign is defined by the user, i.e. the instructor. This section is reproduced below:
% ############### USER-DEFINED CONTROLLER DESIGN ###############% Type of Controller: set it to 'AUTO', 'MANUAL' CONTROLLER_TYPE = 'AUTO'; % PV + observer + state-feedback controller design: automatic mode%CONTROLLER_TYPE = 'MANUAL'; % controller design: manual mode% PV Controller Design SpecificationsPO = 10; % spec #1: maximum of percent overshoottp = 0.15; % spec #2: time of first peak (s)% pole-placement specificationsif ( strcmp ( CART_TYPE, 'IP02') & strcmp( CART_LOAD_TYPE, 'TWO_WEIGHT' ) ) % desired state-feedback controller poles P = [ -6 + 15i, -6 - 15i, -8, -16 ]; % desired full-order observer poles OP = [ -20, -25, -30, -35 ];else error( 'Error: Design the observer and state-feedback controller for your configuration.' )end% initial state variables (at t=0)X0 = [ 0; 0; 0; 0 ];% Specifications of a second-order low-pass filter if strcmp( CART_TYPE, 'IP01' ) % Cart Potentiometer Sensitivity global K_PC % Specifications of a second-order low-pass filter wcf = 2 * pi * 20; % filter cutting frequency
Document Number: 562 ! Revision: 02 ! Page: 6

Vibration Control Laboratory – Instructor Manual
zetaf = 0.9; % filter damping ratioelseif strcmp( CART_TYPE, 'IP02' ) % Cart Encoder Resolution global K_EC % Specifications of a second-order low-pass filter wcf = 2 * pi * 50; % filter cutting frequency zetaf = 0.9; % filter damping ratioelse error( 'Error: Set the type of motorized cart.' )end% Floor-1 Accelerometer Sensitivity (m/s^2/V)global K_ACC% ############### END OF USER-DEFINED CONTROLLER DESIGN ###############
In this section, setting the CONTROLLER_TYPE flag to 'AUTO' will first automaticallytrigger the calculations of the two PV controller gains Kp and Kv by calling the controllerdesign file d_amd1.m. These two controller gains are determined in order to meet the PVcontroller design specifications set by the user in the section printed above. You may changethese time specifications (i.e. zeta, and tp). The Matlab controller design file d_amd1.m willthen use pole placement to calculate the system's observer gain matrix, G, as well as thestate-feedback gain vector, K. G and K are determined accordingly to the pole locations setby the user in the section printed above. The user may also change these specifications.
When set to 'MANUAL', the CONTROLLER_TYPE flag does not set any controller gainsand it lets the students carry out the calculations themselves and manually enter the gainvalues in the Matlab workspace.
It is suggested that the instructor first run the setup_lab_amd1.m script in the 'AUTO' modein order to know the proper controller gains meeting the pre-defined design requirements.The instructor may then have the students run this script file in the 'MANUAL' mode, sinceit is part of the lab procedure to manually calculate the gains needed to achieve the closed-loop system requirements.
Document Number: 562 ! Revision: 02 ! Page: 7

Vibration Control Laboratory – Instructor Manual
6. Solutions to the Pre-LabAssignmentsThe students are required to include the solutions to the pre-lab assignments in theirlab report.
6.1. Solution to Assignment #1: Proportional-Velocity (PV)Controller DesignThe solutions to the questions of Assignment #1 are as follows:
1. The derivation of the open-loop transfer function of your linear cart system frommechanical and electrical first principals is provided in Appendix B of Reference [8]. Itis reminded below:
= ( )Gc srmp ηg Kg ηm Kt
( ) + + ( ) + Rm Mc rmp2
Rm ηg Kg2
Jm s ηg Kg2
ηm Kt Km Beq Rm rmp2
s[1]
2. As derived in Reference [9], the two PV controller's gains, Kp and Kv, as functions of thesecond-order system's characteristic parameters ωnc and ζc can be expressed as shownbelow:
= Kp
ωnc2
Rm ( ) + Mc rmp2
ηg Kg2
Jm
rmp ηg Kg ηm Kt
[2]
and:
= Kv
+ − − 2 ζ c ωnc Rm Mc rmp2
2 ζc ωnc Rm ηg Kg2
Jm ηg Kg2
ηm Kt Km Beq Rm rmp2
rmp ηg Kg ηm Kt
[3]
3. From the two Hint formulae [7] and [8] of Reference [7], ωnc and ζc can be expressed asfunctions of the two PV design specifications previously defined, PO and tp, as shownbelow:
= ζ c
ln PO
100
+
ln PO
100
2
π2and = ωnc
π
tp − 1 ζ c2 [4]
Document Number: 562 ! Revision: 02 ! Page: 8

Vibration Control Laboratory – Instructor Manual
4. The values of ωnc and ζc corresponding to the desired PV design specifications defined inReference [7] are shown below:
= ζ c 0.59 and = ωnc 26.0
rads [5]
As a consequence, the numerical values of Kp and Kv satisfying the desired timerequirements of the closed-loop PV-plus-cart system result to be such as:
= Kp 305.9
Vm and = Kv 7.7
V sm [6]
6.2. Solution to Assignment #2: Linear Equations OfMotion (EOM)The derivation from mechanical principals of the linear Equations Of Motion (EOM) ofyour AMD-1 system is provided in Appendix B of the student handout for this laboratory,i.e. Reference [7]. It is to be noted that the modelling developed in Appendix B uses theenergy-based Lagrangian approach. The two Lagrangian coordinates are chosen to be xc andxf. Also, the input to the system is set to be Fc, the linear force applied by the motorized cart.
Nevertheless, it is left up to you, the instructor, to decide whether to provide the studentswith that Appendix or to have them derive the system's EOM on their own, following themethod of your choice. In the latter case of course, the instructor, i.e. you, should not giveAppendix B as part of the laboratory Student Handout.
6.3. Solution to Assignment #3: State-SpaceRepresentationThe solutions to the questions of Assignment #3 are as follows:
1. According to the system's state-space representation defined by Equations [13], [14],[15], and [16] of Reference [7] and according to the two linear EOM expressed inEquations [B.13] and [B.14] of Reference [7], the state-space matrices A, B, C, and Dresult to be as follows:
Document Number: 562 ! Revision: 02 ! Page: 9

Vibration Control Laboratory – Instructor Manual
= A
0 0 1 00 0 0 1
0rmp
2 Mc Kf
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
−rmp
2 Beq ( ) + Mc Mf
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
0
0 −Kf ( ) + Mc rmp
2 Jm Kg2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
Mc Beq rmp2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
0
[7]
and:
= B
00
rmp2 ( ) + Mc Mf
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
−Mc rmp
2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
[8]
and:
= C
1 0 0 0
0 −Kf ( ) + Mc rmp
2 Jm Kg2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
Mc Beq rmp2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
0 [9]
and:
= D
0
−Mc rmp
2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
[10]
As a remark if both Beq and Jm are neglected, the state-space matrices A, B, C, and Dresult from the two linear EOM expressed in Equations [B.15] and [B.16] of Reference[7], as shown below:
Document Number: 562 ! Revision: 02 ! Page: 10

Vibration Control Laboratory – Instructor Manual
= A
0 0 1 00 0 0 1
0Kf
Mf0 0
0 −Kf
Mf0 0
and = B
00 + Mc Mf
Mc Mf
−1Mf
[11]
and:
= C
1 0 0 0
0 −Kf
Mf0 0 and = D
0
−1Mf
[12]
2. Taking into account Equations [17] and [18] of Reference [7], the system's state-spacematrices found in question 1 for a force input can be converted to voltage input. They canthen be written as shown below:
A = [ , , , ]0 0 1 0[ , , , ]0 0 0 1
0rmp
2 Mc Kf
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
, ,
− + + + Mc ηg Kg
2ηm Kt Km Mc Beq Rm rmp
2Mf ηg Kg
2ηm Kt Km Mf Beq Rm rmp
2
Rm ( ) + + Mc rmp2
Mf Jm Kg2
Mc Jm Kg2
Mf
0,
, , ,
0 −
Kf ( ) + Mc rmp2 Jm Kg
2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
Mc ( ) + ηg Kg2
ηm Kt Km Beq Rm rmp2
Rm ( ) + + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
0
[13]
and:
= B
00
ηg Kg ηm Kt rmp ( ) + Mc Mf
Rm ( ) + + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
−Mc ηg Kg ηm Kt rmp
Rm ( ) + + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
[14]
and:
Document Number: 562 ! Revision: 02 ! Page: 11

Vibration Control Laboratory – Instructor Manual
= C
1 0 0 0
0 −Kf ( ) + Mc rmp
2Jm Kg
2
+ + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
Mc ( ) + ηg Kg2
ηm Kt Km Beq Rm rmp2
Rm ( ) + + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
0 [15]
and:
= D
0
−Mc ηg Kg ηm Kt rmp
Rm ( ) + + Mc rmp2 Mf Jm Kg
2 Mc Jm Kg2 Mf
[16]
3. As a result of the default system configuration provided in the question and of thecorresponding model parameter values given in Reference [1], the system's state-spacematrices are evaluated to be such as:
= A
0 0 1 00 0 0 10 278.9 -18.7 00 -336.1 6.0 0
and = B
00
3.0-1.0
[17]
and:
= C
1.0 0 0 00 -336.1 6.0 0 and = D
0-1.0 [18]
Note:The evaluation of the state-space matrices for your particular system may differ fromEquations [17] and [18] depending on the actual AMD-1 configuration that you areusing.For proper numerical evaluation, the instructor, i.e. you, should provide the students withinformation regarding the system configuration that is going to be used in the in-labsession. Particularly, the number of load masses (if any) attached on top of the linear cartshould be specified to the students so that they can properly determine the modelparameter values corresponding to the actual in-lab.
4. Since the system's state-space matrix A is a 4-by-4 matrix, there should be four open-looppoles. Calculating the four eigenvalues of A, as evaluated in Equation [17] above, resultsin the following open-loop pole locations:
, , ,-15.8 − + 1.4 17.0 j − − 1.4 17.0 j 0 [19]All the poles shown in Equation [19] lie in the Left-Hand-Plane (LHP). Therefore theopen-loop system is stable. It can clearly be seen that the open-loop system has one poleat the origin of the s-plane. Consequently, the system is of type one. As seen in Equation[1], the two real poles can be attributed to the linear cart positioning system. The two
Document Number: 562 ! Revision: 02 ! Page: 12

Vibration Control Laboratory – Instructor Manual
complex and conjugate poles can be attributed to the floor deflection of the flexiblestructure. The pair of complex poles is very lightly damped, with a damping ratio ofapproximately 0.08. Therefore, one can expect the structure's open-loop response to behighly underdamped and oscillatory. A feedback controller is required to dampen thevibration.
6.4. Solution to Assignment #4: Full-Order ObserverThe solution to the question of Assignment #4 is as follows:
The observability matrix defined by Equation [24] of Reference [7] is can be calculated asfollows:
= Wo
1 0 0 00 -336 6 00 0 1 00 1669 -112 -3360 279 -19 00 81747 78 16690 -5212 349 2790 -538938 8520 81747
[20]
It is determined that Wo has a rank of 4, which is full rank. Therefore, the AMD-1 system isobservable and a state observer can be designed.
Document Number: 562 ! Revision: 02 ! Page: 13

Vibration Control Laboratory – Instructor Manual
7. Typical In-Lab Results
7.1. Checking the Actual Controller GainsThe solutions of this first in-lab section are contained in the d_amd1.m design file. Theinstructor, i.e. you, can call the d_amd1.m file from the setup_lab_amd1.m Matlab script bysetting the CONTROLLER_TYPE flag to 'AUTO'. This automatically calculates and returnsto the Matlab workspace the appropriate gain values meeting the design requirements forboth controllers.
CAUTION:For safety reasons, the different controller gain values, as determined by the students,must be checked by the instructor (i.e. yourself) before they start the real-timecontroller.
7.1.1. Checking the PV Position Controller Gains: Kp and Kv
Both PV controller gains, Kp and Kv, meeting the design specifications have been calculatedin pre-lab Assignment #1 and are expressed by Equation [6].
Setting the flag SYS_ANALYSIS to 'YES' in the controller design file d_amd1.m produces,for example, a plot of the simulated cart position response to a unit step input, asrepresented in Figure 1, below.
Figure 1 Simulated Unit Step Response: Cart-Plus-PV Controller
Document Number: 562 ! Revision: 02 ! Page: 14

Vibration Control Laboratory – Instructor Manual
It can be observed that the response plotted in Figure 1 and corresponding to the PVcontroller gains expressed in Equation [6], is in complete agreement with the chosen timespecifications (i.e. PO = 10 % and tp = 0.15 s). However, this simulation is for an idealsystem and does not take into account the actual system's nonlinearity, like, for example, thepower amplifier saturation.
7.1.2. Checking the State-Feedback Gain Vector: KIt is reminded that an observer-based state-feedback controller can be completely describedby the following relationship combining both state and error equations:
=
∂∂t X
∂∂t Xe
− A B K B K0 − A G C
XXe
[21]
The desired closed-loop poles locations defined in Equation [3] of Reference [7] are due tothe closed-loop state-feedback design. They correspond to the eigenvalues of the statematrix (A-BK).
It results that the state-feedback gain vector, K, can be calculated by using the followingMatlab command line:
>> P = [ -6 + 15i, -6 - 15i, -8, -16 ];>> K = place( A, B, P )K = 45.0945 -213.8050 4.3052 -4.5640
where P is a Matlab vector containing the desired pole locations, as characterized byEquation [3] of Reference [7].
Therefore, the state-feedback gain vector K satisfying the design requirements can beexpressed as follows:
= K [ ], , ,45.1 -213.8 4.3 -4.6 [22]
The resulting closed-loop poles can be checked with Matlab by using the followingcommand line:
>> eig(A-B*K)ans = -16.0000
Document Number: 562 ! Revision: 02 ! Page: 15

Vibration Control Laboratory – Instructor Manual
-8.0000 -6.0000 +15.0000i -6.0000 -15.0000i
7.1.3. Checking the Observer Gain Matrix: GThe desired closed-loop poles locations defined in Equation [4] of Reference [7] are due tothe observer error system. They correspond to the eigenvalues of the state matrix (A-GC).
It results that the observer gain matrix, G, can be calculated by using the following Matlabcommand line:
>> OP = [ -20, -25, -30, -35 ];>> G = place( A', C', OP )'G = 36.6829 0.0036 -4.7604 -0.1765 107.6736 -0.7844 -243.1164 -1.5950
where OP is a Matlab vector containing the desired pole locations, as characterized byEquation [4] of Reference [7].
Therefore, the observer gain matrix G satisfying the design requirements can be expressedas follows:
= G
36.7 0-4.8 -0.2
107.7 -0.8-243.1 -1.6
[23]
The resulting closed-loop poles can be checked with Matlab by using the followingcommand line:
>> eig( A - G * C )ans = -35.0000 -20.0000 -30.0000 -25.0000
Document Number: 562 ! Revision: 02 ! Page: 16

Vibration Control Laboratory – Instructor Manual
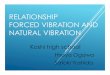
7.2. Real-Time Implementation Of The AMD-1 Switching-Mode ControllerThe AMD-1 floor estimated displacement, xf, (from the full-order state observer) is plottedin the xf (mm) Scope and is represented in Figure 2, below. This set of data comes from thesame experimental run as the data presented in Figures 10 and 11 of Reference [7].
Figure 2 AMD-1 Floor Estimated Displacement: xf (mm)
Using Figure [10] of Reference [7] and Figure 2 above, it can be measured that the timerequired by the AMD control system to reduce the floor deflection amplitude to less than1.5 mm is actually less than 1.0 second, which is in perfect agreement with our designspecifications. This result can be compared with the natural behaviour of the flexible struc-ture (i.e. AMD off), as illustrated by the first 10 seconds of data in Figure 2. In its naturalbehaviour, it can be seen that the floor oscillation amplitude becomes less than 2 mm inabout 9 seconds. A significant vibration reduction is therefore observed.
Also corresponding to the same experimental run as the data presented in Figures 10 and 11of Reference [7] is the actual commanded motor voltage. This is illustrated in Figure 3,below. In agreement with the principles of a linear closed-loop control system, it can be
Document Number: 562 ! Revision: 02 ! Page: 17

Vibration Control Laboratory – Instructor Manual
seen in Figure 3 that the command voltage input never goes into saturation.
Figure 3 AMD-1 Cart Actual Command Voltage: Vm (V)
8. Possible Lab ExtensionsOnce a working AMD controller has been developed, one can investigate and assess inmore details the system's disturbance rejection. This is the regulation problem. Differentkinds of excitation disturbances can be tried, from an external manual tap/push applied tothe structure to diverse types repeatable self-excitations (like the one implemented in thislaboratory). Furthermore, the AMD-1 "ground" floor can also be excited. This is achieved,for example, by mounting the AMD-1 plant on top of a shake table apparatus, as describedin Reference [10]. This setup allows for several types of base excitations to be generated.
Furthermore, the ability to vary parameters (e.g. cart weight) and the hardware configurationis also available should you wish to change the dynamics of your AMD-1 plant. You can re-fer to Reference [1] for some of the other possible hardware configurations. For instance,additional floor(s) and linear cart(s) can be added to increase the system's number of vibra-tion modes and degrees of freedom.
Document Number: 562 ! Revision: 02 ! Page: 18

Vibration Control Laboratory – Instructor Manual
9. Lab ReportInstructions regarding the students' lab report together with its corresponding markingscheme are left up to the instructor�s discretion.
Document Number: 562 ! Revision: 02 ! Page: 19