Embed Size (px)
Citation preview
Linear Algebra(Aljabar Linier)
Week 2
Universitas Multimedia NusantaraSerpong, Tangerang
Dr. Ananda Kusumae-mail: [email protected]
Ph: 081338227031, 081908058069
Agenda
• Review on Vectors– Exercises
• Systems of Linear Equations– Introduction– Direct Methods
• Matrices and echelon form• Gaussian Elimination• Gauss-Jordan Elimination
– Spanning Sets and Linear Independence– Iterative Methods
• Jacobi’s• Gauss-Seidel
– Applications– Exercises
Vectors: Exercises
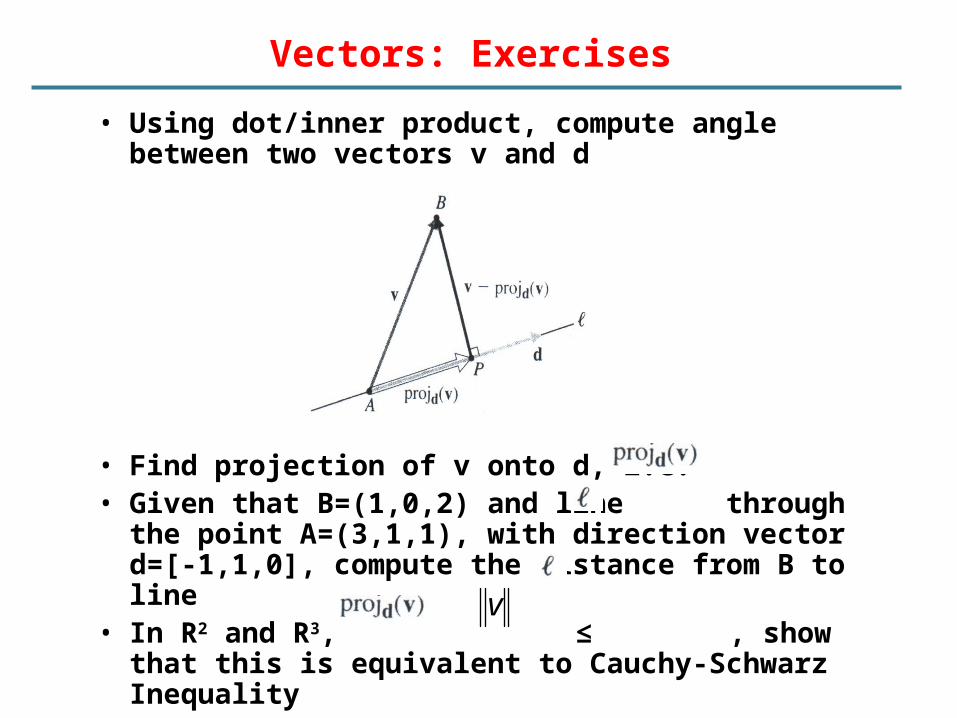
• Using dot/inner product, compute angle between two vectors v and d
• Find projection of v onto d, i.e.• Given that B=(1,0,2) and line through the point
A=(3,1,1), with direction vector d=[-1,1,0], compute the distance from B to line
• In R2 and R3, ≤ , show that this is equivalent to Cauchy-Schwarz Inequality
v

Systems of Linear Equations

Linear Equations
Recall equation of a line in R2 and a plane in R3 from last week’s lecture
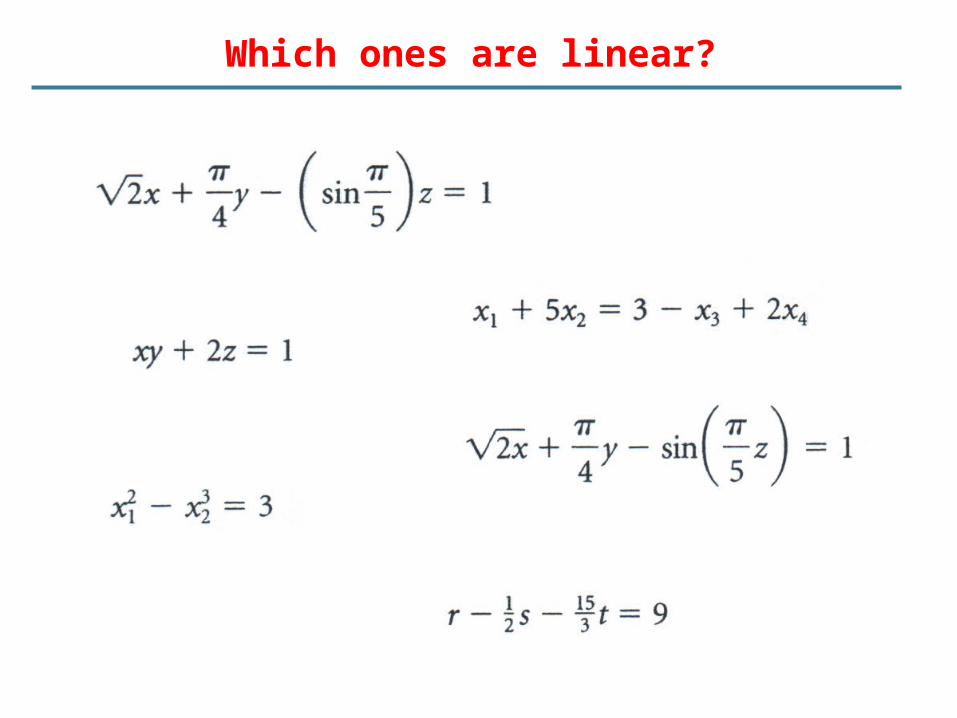
Which ones are linear?

A system of linear equations
• A system of linear equations is a finite set of linear equations, each with the same variables.
• A solution of a system of linear equations is a vector that is simultaneously a solution of each equation in the system
• The solution set of a system of linear equations is the set of all solutions of the system
• A system of linear equations with real coefficients has either:

Example in R2
• Solve the following systems of linear equations

Example in R3

Homogeneous Linear Systems
• A homogeneous system cannot have no solution. It will have either a unique solution (namely the zero or trivial solution) or infinitely many solutions
• A homogenous system of m linear equations with n variables, where m < n, then the system has infinitely many solutions

Solving a system of linear equations
• Two linear systems are called equivalent if they have the same solution sets
• Example: which one is easier to solve?
• The approach to solving a system of linear equations is to transform the given system into an equivalent one that is easier to solve
– Triangular structure and use back-substitution to solve– Develop strategy for transforming a given system in an equivalent one
Example
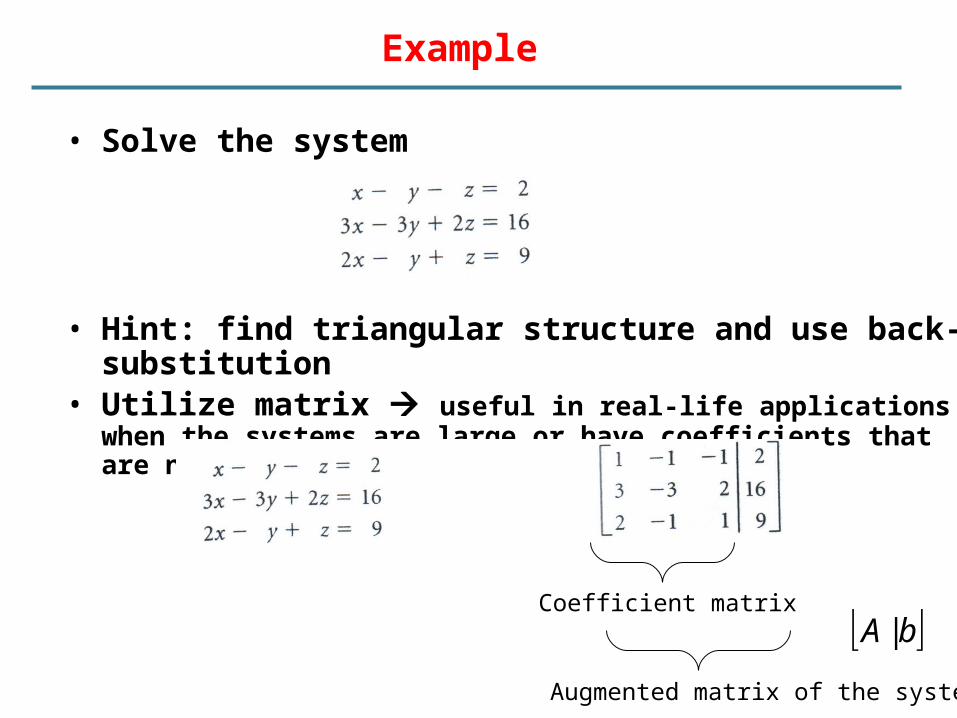
• Solve the system
• Hint: find triangular structure and use back-substitution• Utilize matrix useful in real-life applications when the systems
are large or have coefficients that are not nice
Augmented matrix of the system
Coefficient matrix bA |
Example
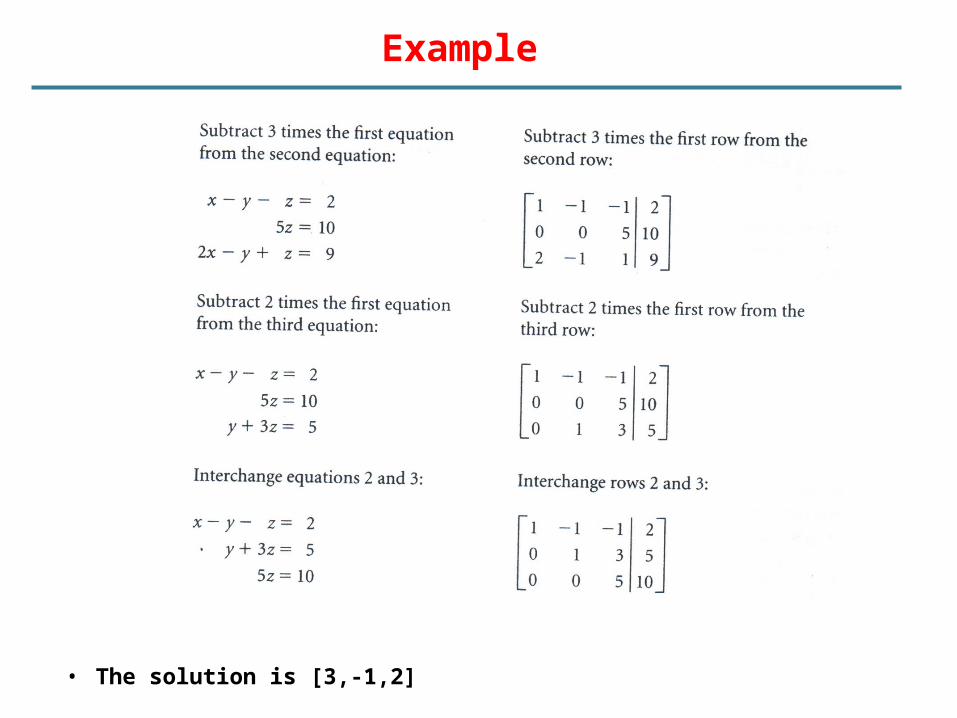
• The solution is [3,-1,2]

Direct Methods for Solving Linear Systems

Introduction
• Based on the idea of reducing the augmented matrix of the given system to a form that can then be solved by backsubtitution– Direct leads directly to the solution (if one exists) in a finite
number of steps– In solving a linear system, it will not always possible to reduce the
coeffient matrix to triangular form, but we can always achieve a staircase pattern in the nonzero entries of the final matrix
Row Reduction: Convert a matrix to echelon form
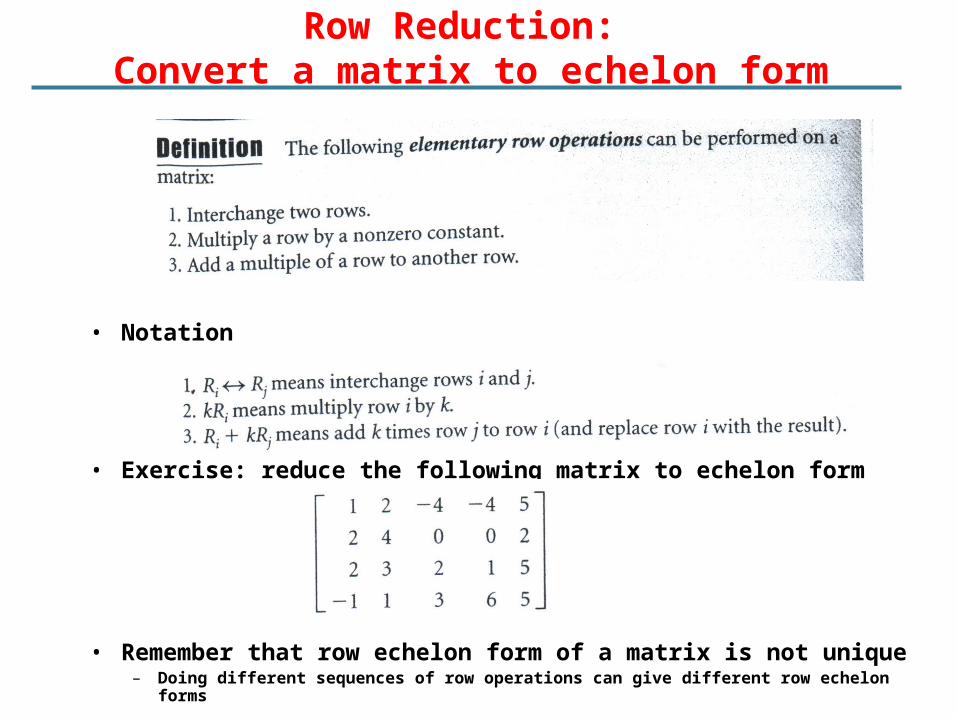
• Notation
• Exercise: reduce the following matrix to echelon form
• Remember that row echelon form of a matrix is not unique– Doing different sequences of row operations can give different row echelon forms
Row Equivalent
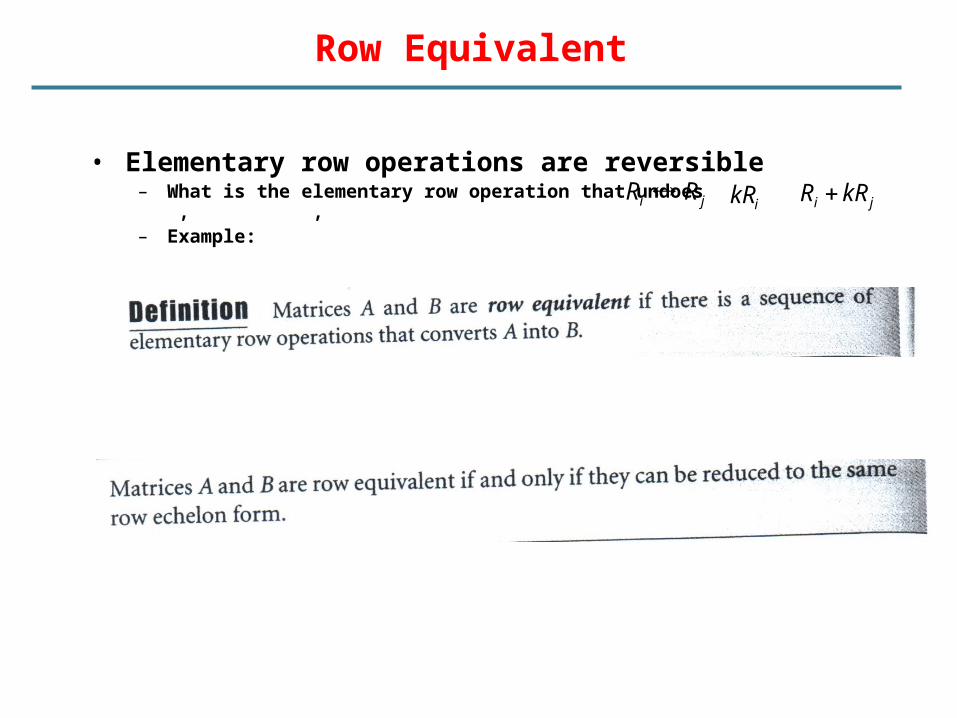
• Elementary row operations are reversible– What is the elementary row operation that undoes , ,– Example:
ji RR ikR ji kRR
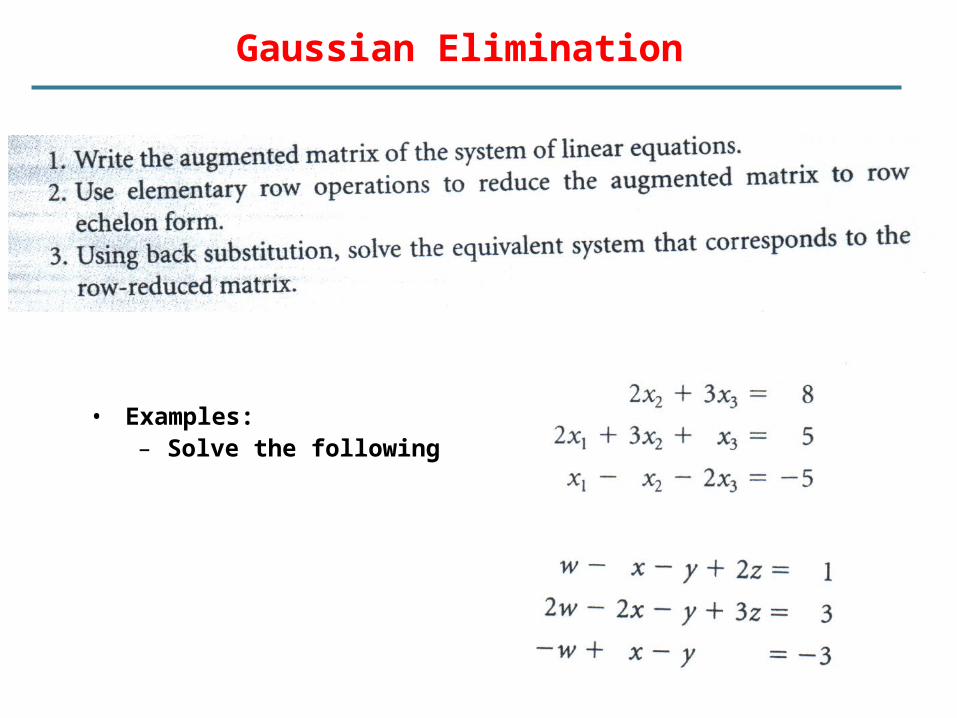
Gaussian Elimination
• Examples:– Solve the following
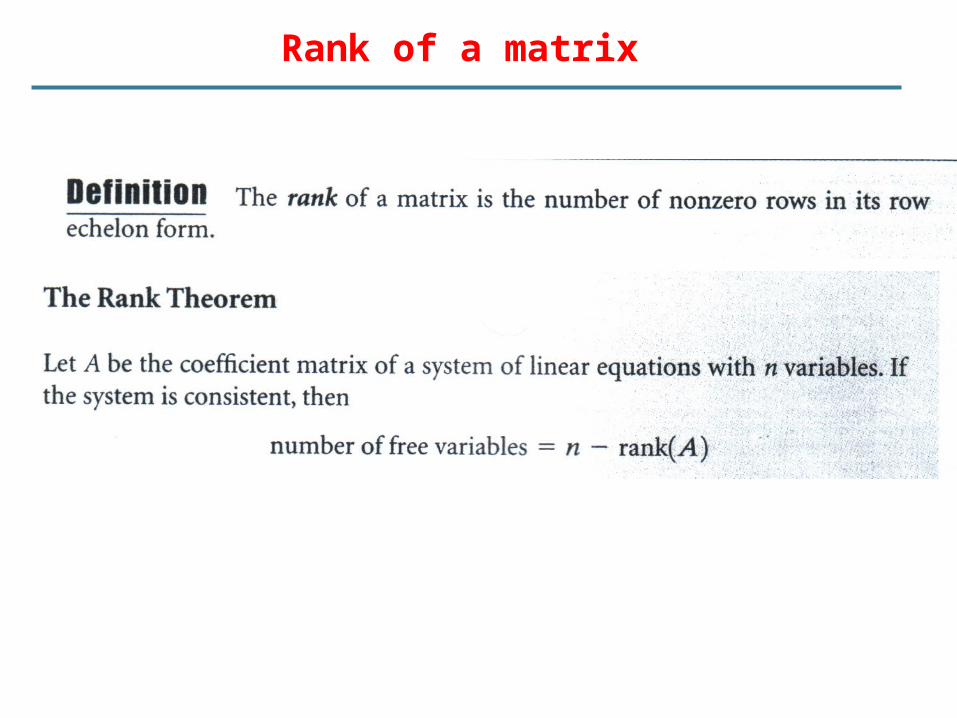
Rank of a matrix
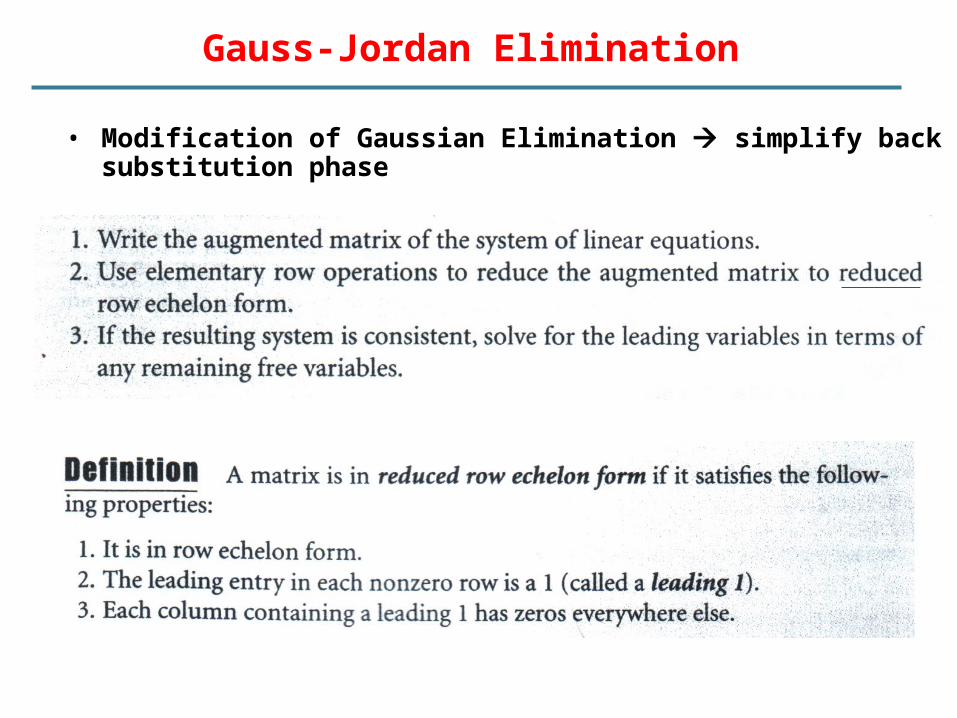
Gauss-Jordan Elimination
• Modification of Gaussian Elimination simplify back substitution phase
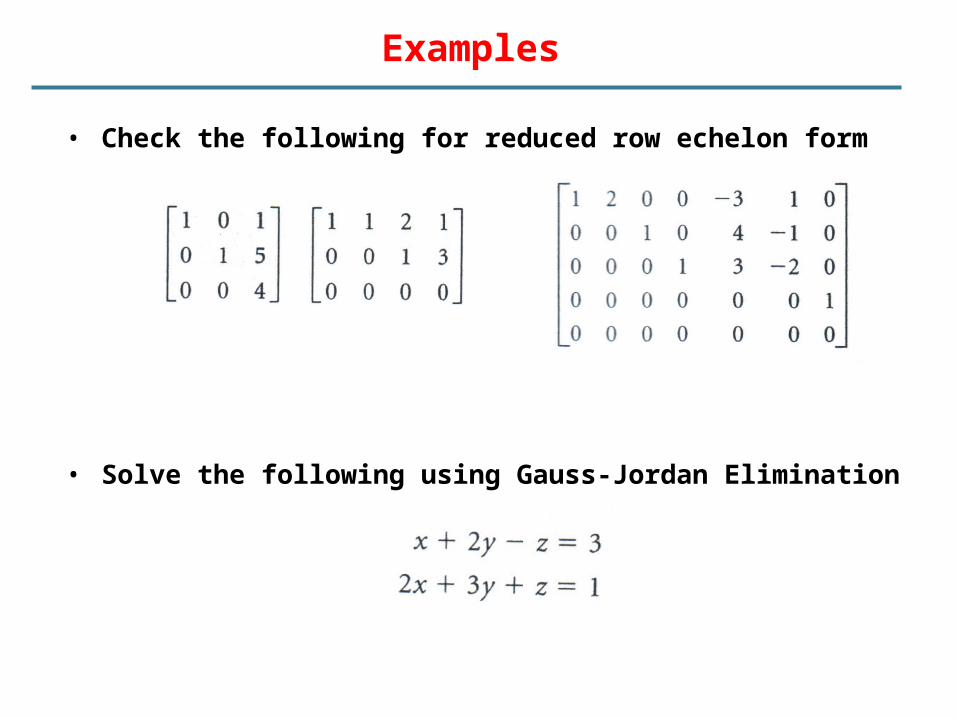
Examples
• Check the following for reduced row echelon form
• Solve the following using Gauss-Jordan Elimination

Spanning Setsand Linear Independence
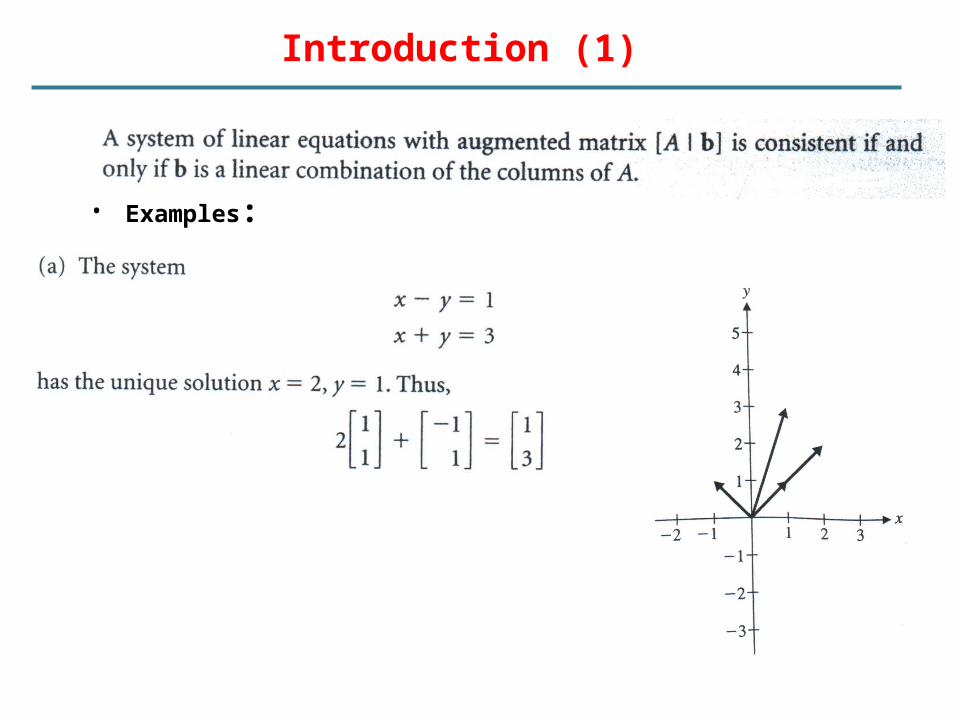
Introduction (1)
• Examples:

Introduction (2)
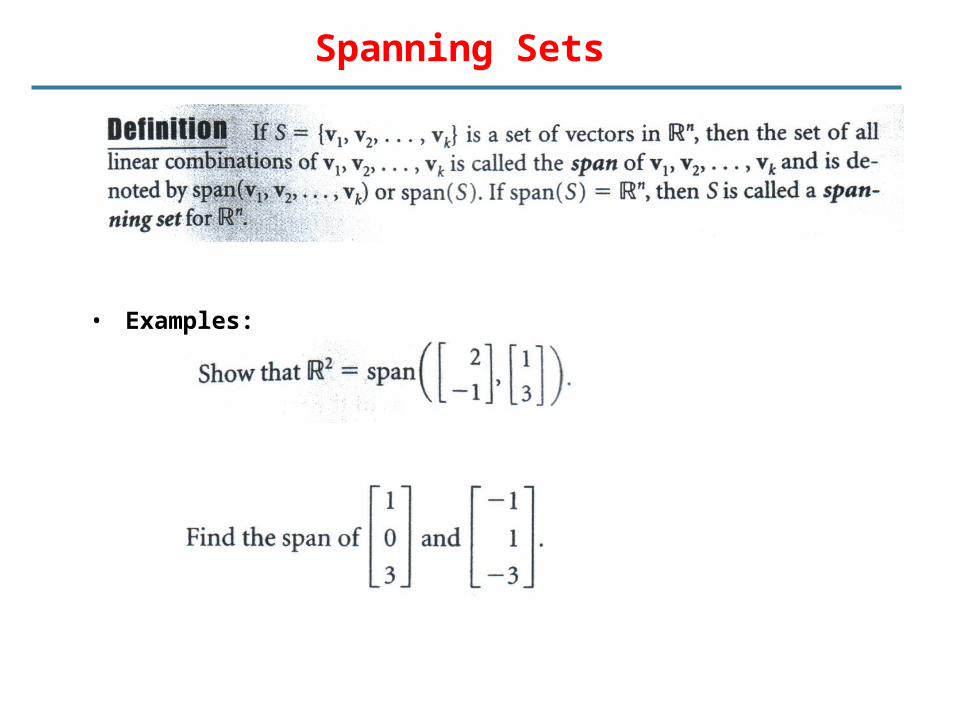
Spanning Sets
• Examples:
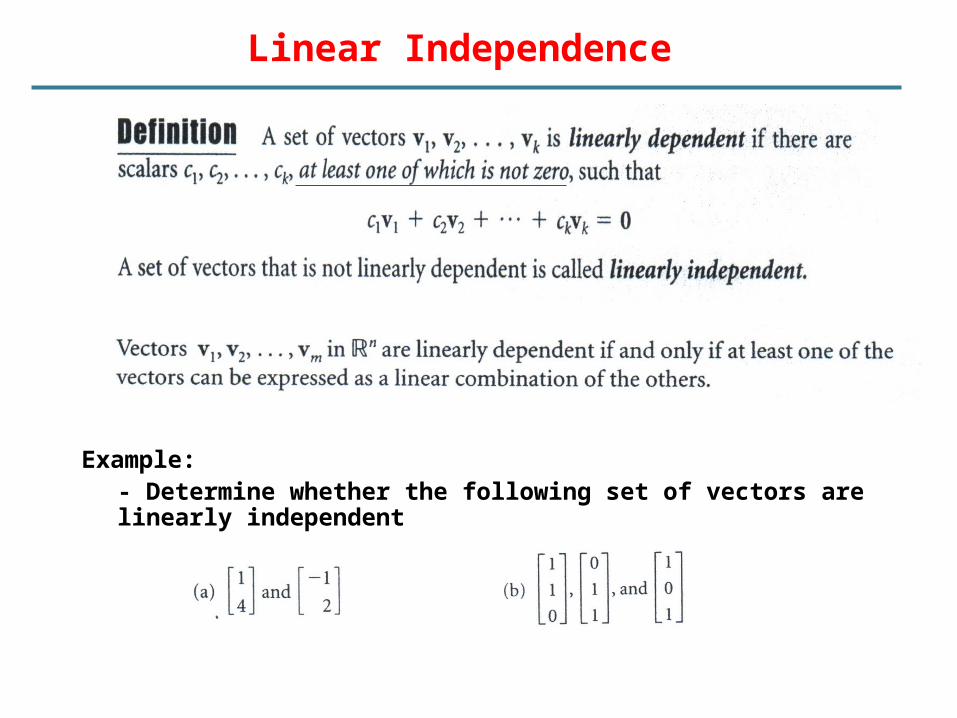
Linear Independence
Example:- Determine whether the following set of vectors are linearly independent
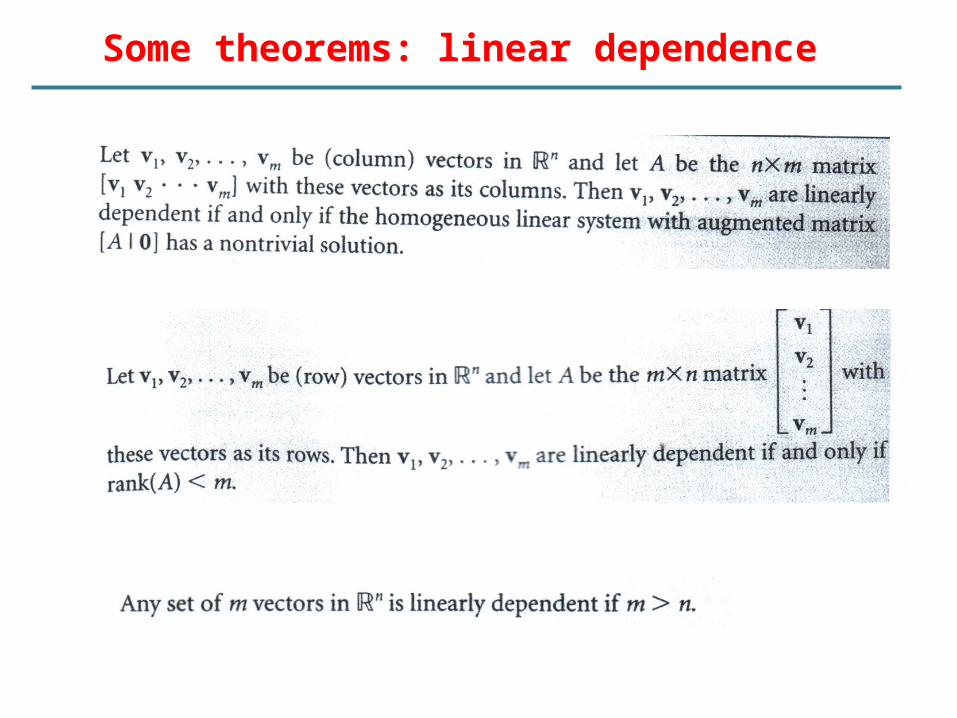
Some theorems: linear dependence
The End
To be continued next week
Thank you for your attention!





























