Embed Size (px)
Citation preview

INFORMATICA
INDUSTRIALE
Lezione 6
Prof. Christian [email protected]
Tutor: Stefano [email protected]
Lezione 5 2
Informatica Industriale
Device Structure:Peripherals
» I/O» Parallel Slave Port (PSP)» Timer» Capture/Compare/PWM (CCP)» Serial Slave Port (SSP)» Master Synchronous Serial Port (MSSP)» Addressable USART» CAN» Comparator Voltage Reference» 10-bit A/D Converter

Lezione 5 3
Informatica Industriale
PIC-USART MODULE(Universal Synchronous Asynchronous Receiver Transmitter)
• Full-duplex Asynchronous Or Half-duplex Synchronous• 9-bit Addressable mode• Double-buffered transmit and receive buffers• Separate transmit and receive interrupts• Dedicated baud rate generator
Lezione 5 4
Informatica Industriale
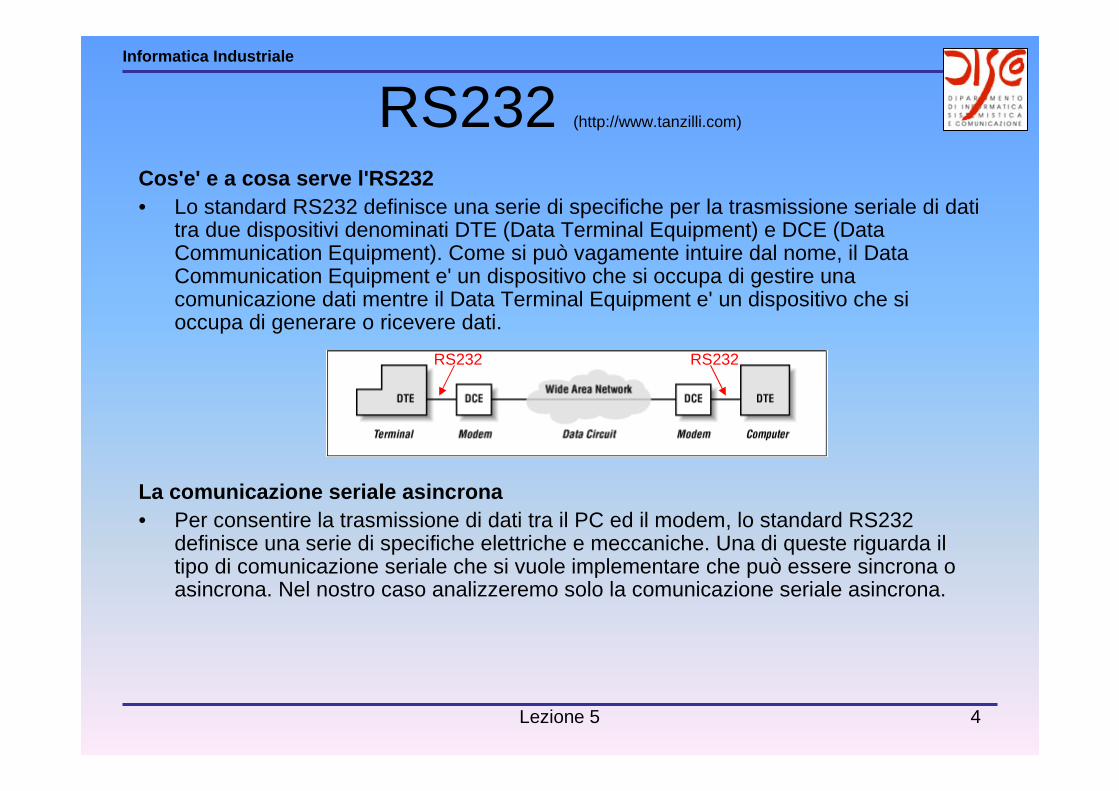
RS232 (http://www.tanzilli.com)
Cos'e' e a cosa serve l'RS232• Lo standard RS232 definisce una serie di specifiche per la trasmissione seriale di dati
tra due dispositivi denominati DTE (Data Terminal Equipment) e DCE (Data Communication Equipment). Come si può vagamente intuire dal nome, il Data Communication Equipment e' un dispositivo che si occupa di gestire una comunicazione dati mentre il Data Terminal Equipment e' un dispositivo che si occupa di generare o ricevere dati.
La comunicazione seriale asincrona• Per consentire la trasmissione di dati tra il PC ed il modem, lo standard RS232
definisce una serie di specifiche elettriche e meccaniche. Una di queste riguarda il tipo di comunicazione seriale che si vuole implementare che può essere sincrona o asincrona. Nel nostro caso analizzeremo solo la comunicazione seriale asincrona.
RS232 RS232
Lezione 5 5
Informatica Industriale
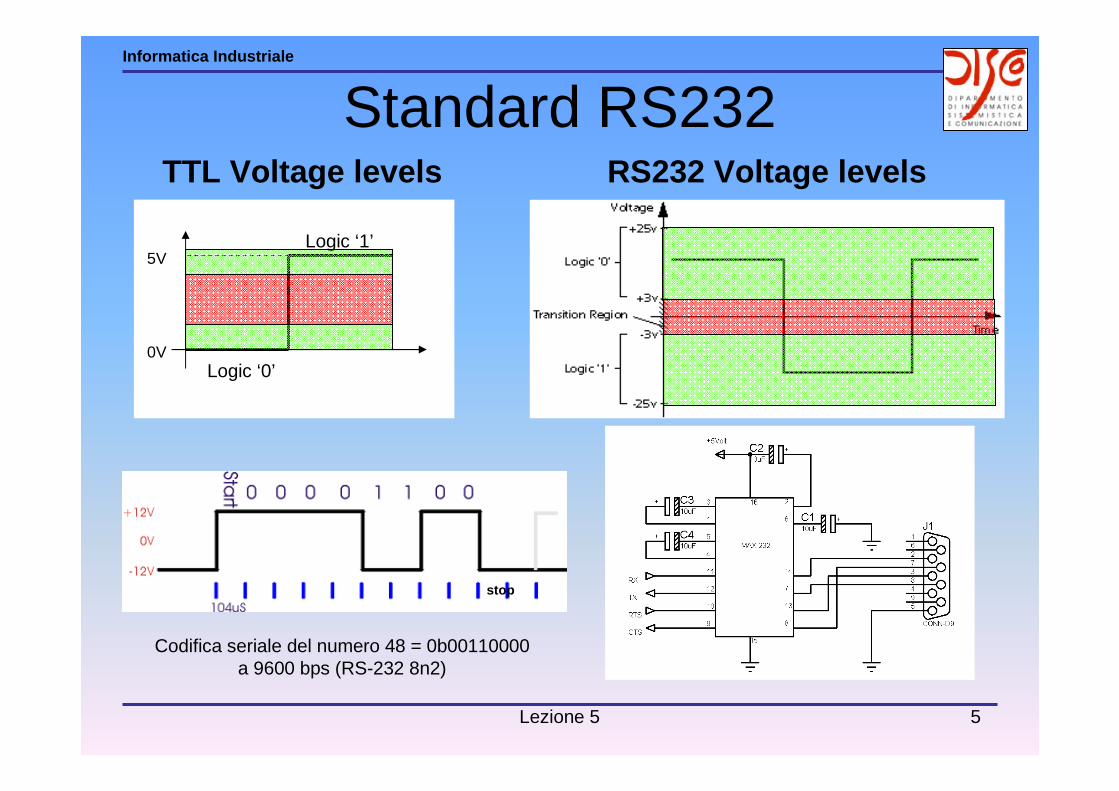
Standard RS232RS232 Voltage levelsTTL Voltage levels
5V
0VLogic ‘0’
Logic ‘1’
Codifica seriale del numero 48 = 0b00110000a 9600 bps (RS-232 8n2)
stop

Lezione 5 6
Informatica Industriale
USART Block Diagram

Lezione 5 7
Informatica Industriale
UART Tx Setup
CSRC Clock Source Selection (synch mode only)1 = Master mode, clock generated by internal BRG0 = Slave mode, clock derived from external
TX9 9-bit / 8-bit Mode Transmission Selection1 = 9-bit Transmission Format0 = 8-bit Transmission Format
TXEN Transmit Enable (overridden by SREN/CREN in SYNC m ode)1 = Transmitter Enabled0 = Transmitter Disabled
SYNC Synchronous / Asynchronous Selection1 = Synchronous Mode0 = Asynchronous Mode
BRGH High / Low Baud Rate Selection1 = High Speed Baud Rate, FOSC / 160 = Low Speed Baud Rate, FOSC / 64
TRMT Transmit Shift Register Status1 = Transmit Shift Register Empty0 = Transmit Shift Register Full
TX9D 9th Bit of Transmit Data (valid only in 9-bit mod e)Written before TXREG, used for parity or address/data

Lezione 5 8
Informatica Industriale
UART Rx Setup
SPEN Serial Port Enable1 = Serial Port Enabled, Uses RX and TX as serial port pins0 = Serial Pore Disabled, RX and TX general purpose I/Os
RX9 9-bit / 8-bit Mode Reception Selection1 = 9-bit Reception Format0 = 8-bit Reception Format
SREN Single Receive Enable (Synchronous Mode Only)1 = Enable a Single Receive0 = Disable Single Receive, cleared when reception completed
CREN Continuous Receive Enable1 = Enables Receiver; Continuous Reception in Synch mode, overriding SREN0 = Disables Receiver in Asynchronous Mode, SREN controls Synch mode
ADDEN Address Detect Enable1 = Enables 9-bit Address Detection, Interrupt and load RCREG when bit 9 is ‘1’0 = Disables Address Detection, all bytes received
FERR Framing Error1 = Framing Error Occurred in this byte, clear by read RCREG + receive next byte0 = No Framing Error
OERR Overrun Error1 = Overrun Error, cleared by clearing CREN0 = No Overrun Error
RX9D 9th Bit of Received Data (valid only in 9-bit mod e)Read before TXREG, used for parity or address/data

Lezione 5 9
Informatica Industriale
Baud Rate Generator

Lezione 5 10
Informatica Industriale
Esempio Usart TX
void putchar(value){
while (PIR1bits.TXIF == 0);// Wait for empty FIFOTXREG = value;
}

Lezione 5 11
Informatica Industriale
MCC18 USART

Lezione 5 12
Informatica Industriale
PIC MSSP MODULE(MASTER SYNCHRONOUS SERIAL PORT)
SPI

Lezione 5 13
Informatica Industriale
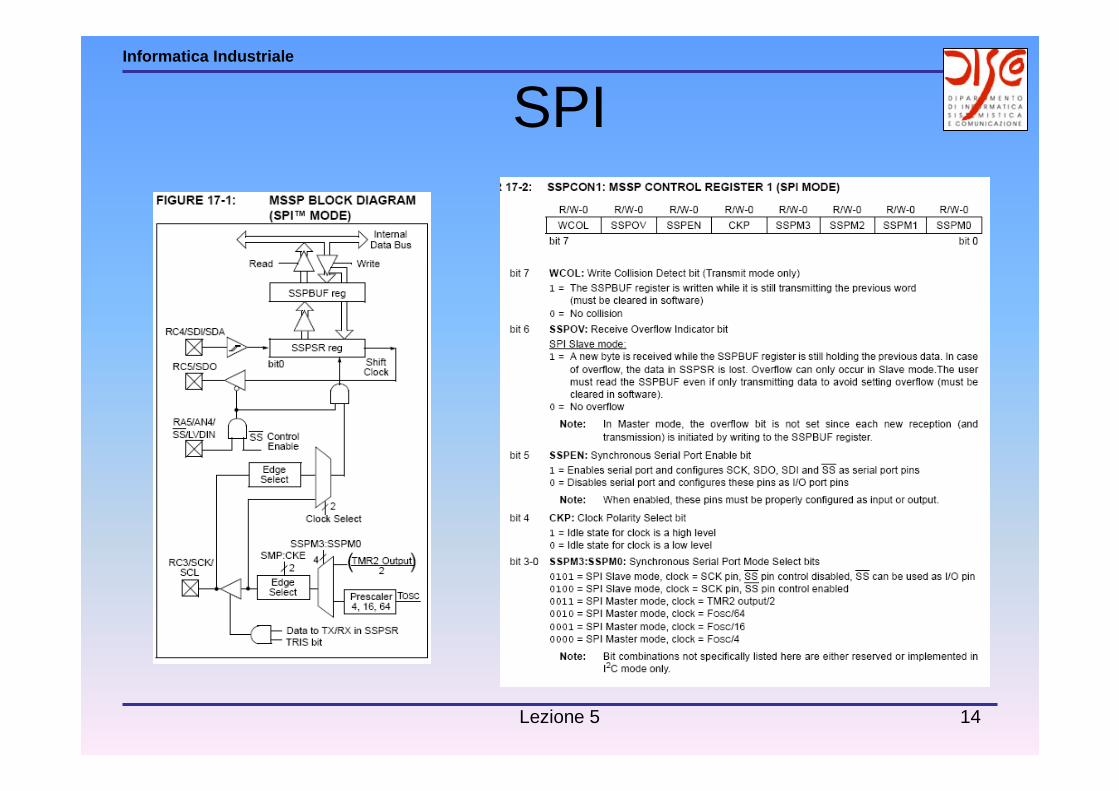
SPI
Lezione 5 14
Informatica Industriale
SPI

Lezione 5 15
Informatica Industriale
MCC18 SPI
Lezione 5 16
Informatica Industriale
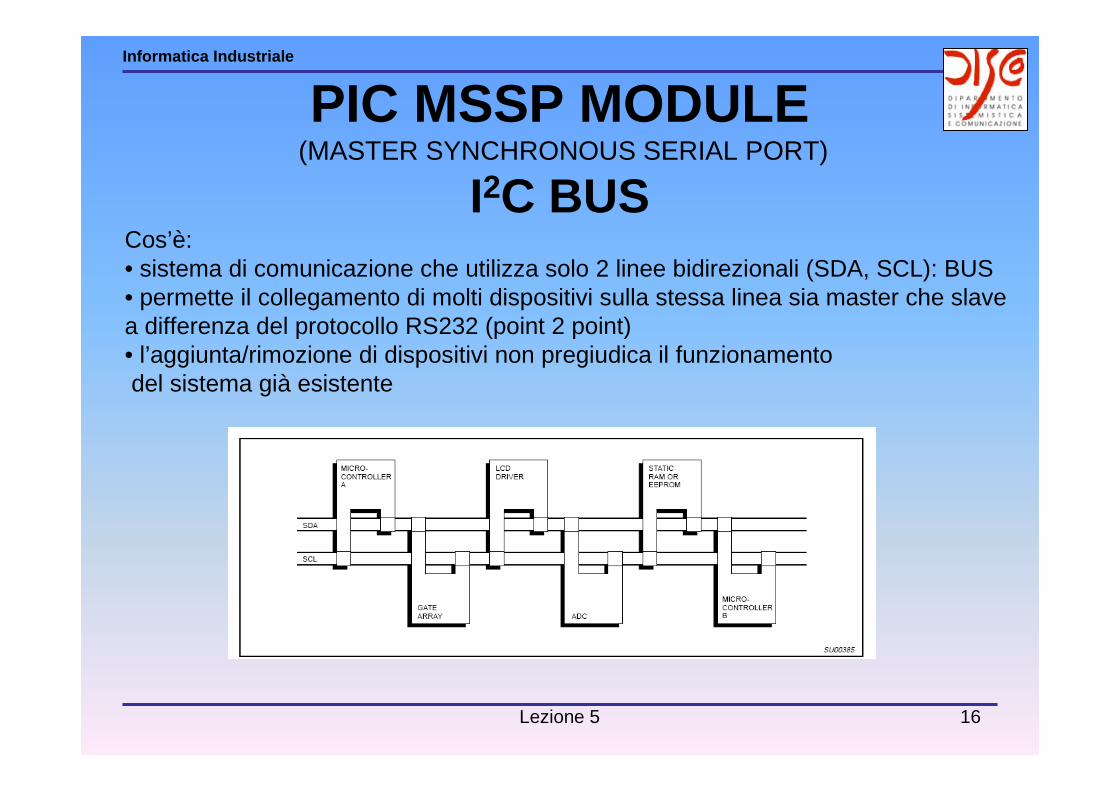
PIC MSSP MODULE(MASTER SYNCHRONOUS SERIAL PORT)
I2C BUSCos’è:• sistema di comunicazione che utilizza solo 2 linee bidirezionali (SDA, SCL): BUS• permette il collegamento di molti dispositivi sulla stessa linea sia master che slave a differenza del protocollo RS232 (point 2 point) • l’aggiunta/rimozione di dispositivi non pregiudica il funzionamentodel sistema già esistente

Lezione 5 17
Informatica Industriale
I2C BUS

Lezione 5 18
Informatica Industriale
I2C BUS5.0 BIT TRANSFERDue to the variety of different technology devices(CMOS, NMOS,bipolar) which can be connected to the I2C-bus, the levels of the logical ‘0’ (LOW) and ‘1’(HIGH) are not fixed and depend on theassociated level of VDD (see Section 15.0 for ElectricalSpecifications). One clock pulse is generated for eachdata bit transferred.5.1 Data validityThe data on the SDA line must be stable during the HIGH period of the clock. The HIGH or LOW state of the data line can only change when the clock signal on the SCL line is LOW (see Figure 5).
Lezione 5 19
Informatica Industriale
I2C BUS
5.2 START and STOP conditionsWithin the procedure of the I2C-bus, unique situations arise whichare defined as START and STOP conditions (see Figure 6).A HIGH to LOW transition on the SDA line while SCL is HIGH is onesuch unique case. This situation indicates a START condition.A LOW to HIGH transition on the SDA line while SCL is HIGHdefines a STOP condition.START and STOP conditions are always generated by the master.The bus is considered to be busy after the START condition. Thebus is considered to be free again a certain time after the STOPcondition. This bus free situation is specified in Section 15.0.Detection of START and STOP conditions by devices connected tothe bus is easy if they incorporate the necessary interfacinghardware. However, microcontrollers with no such interface have tosample the SDA line at least twice per clock period in order to sensethe transition.

Lezione 5 20
Informatica Industriale
I2C BUS6.2 AcknowledgeData transfer with acknowledge is obligatory. Theacknowledge-related clock pulse is generated by the master. The transmitter releases the SDA line (HIGH) during the acknowledge clock pulse.
The receiver must pull down the SDA line during the acknowledge clock pulse so that it remains stable LOW during the HIGH period of this clock pulse .

Lezione 5 21
Informatica Industriale
PIC I2C BUS

Lezione 5 22
Informatica Industriale
PIC I2C BUS
Lezione 5 23
Informatica Industriale
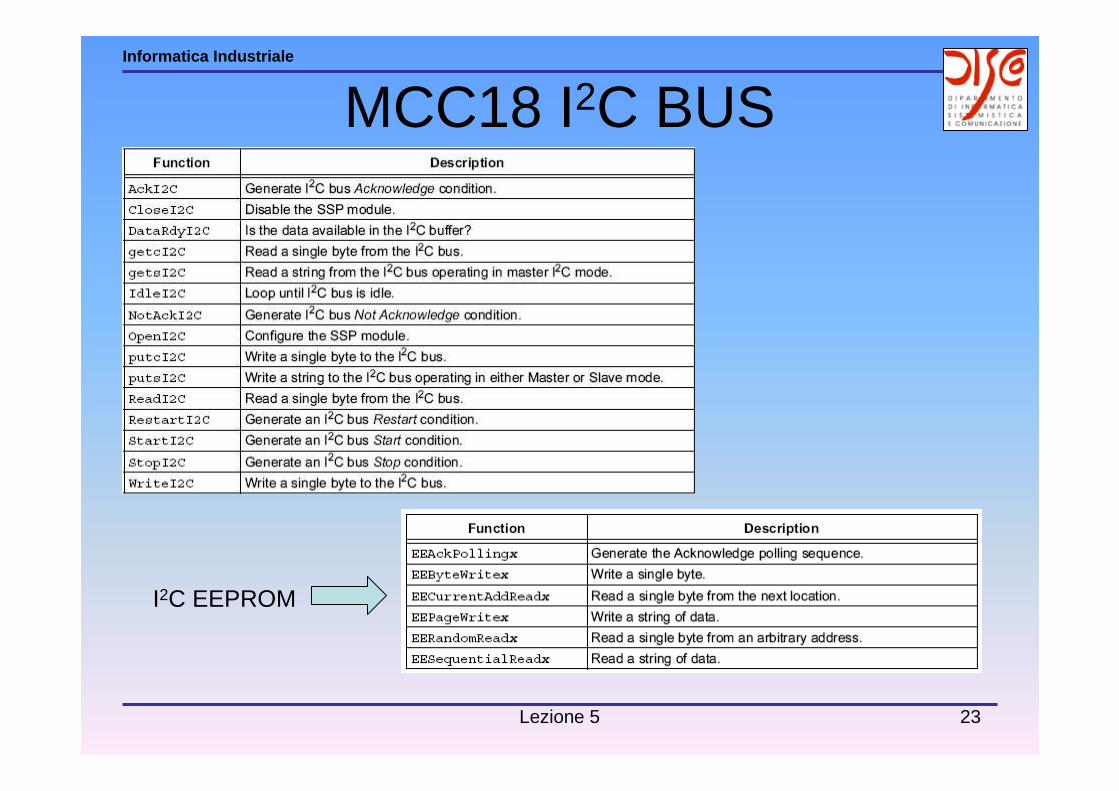
MCC18 I2C BUS
I2C EEPROM