Embed Size (px)
Citation preview

Heterogeneous Agent Models
in Continuous Time, II
ECO 235: Advanced Macroeconomics
Benjamin Moll
Princeton
StanfordFebruary 12, 2014
1 / 74

Plan for Today’s Lecture
1 Numerical solution of Huggett model
2 Background: diffusion processes, HJB equations, Kolmogorovforward equations
3 “Wealth Distribution and the Business Cycle”
• Do income and wealth distribution matter for the
macroeconomy?
• better way (IMHO) of doing Krusell and Smith (1998)
2 / 74

Numerical Solution: Finite
Difference Methods
3 / 74

Finite Difference Methods
• See http://www.princeton.edu/~moll/HACTproject.htm
• Hard part: HJB equation. Easy part: KF equation.
• Explain HJB using neoclassical growth model, easily
generalized to Huggett model
ρV (k) = maxc
U(c) + V ′(k)[F (k)− δk − c]
• Functional forms
U(c) =c1−σ
1− σ, F (k) = kα
• Use finite difference method. MATLAB code HJB_NGM.m
• Approximate V (k) at I discrete points in the state space,
ki , i = 1, ..., I . Denote distance between grid points by ∆k .
• Shorthand notation
Vi = V (ki )
4 / 74

Finite Difference Approximations to V′(ki)
• Need to approximate V ′(ki ).
• Three different possibilities:
V ′(ki ) ≈Vi − Vi−1
∆k= V ′
i ,B backward difference
V ′(ki ) ≈Vi+1 − Vi
∆k= V ′
i ,F forward difference
V ′(ki ) ≈Vi+1 − Vi−1
2∆k= V ′
i ,C central difference
5 / 74

Finite Difference Approximations to V′(ki)
!
"# $ # #%$
!# !#%$
!# $
Central
Backward
Forward
6 / 74

Finite Difference Approximation
• FD approximation to HJB is
ρVi = U(ci ) + V ′i [F (ki )− δki − ci ] (∗)
where ci = (U ′)−1(V ′i ), and V ′
i is one of backward, forward,central FD approximations.
• Two complications:
1 which FD approximation to use? “Upwind scheme”
2 (∗) is extremely non-linear, need to solve iteratively:“explicit” vs. “implicit method”
7 / 74

Which FD Approximation?• Which of these you use it extremely important
• Correct way: use so-called “upwind scheme.” Rough idea:• forward difference whenever drift of state variable positive
• backward difference whenever drift of state variable negative
• In our example: define
si ,F = F (ki )−δki−(U ′)−1(V ′i ,F ), si ,B = F (ki )−δki−(U ′)−1(V ′
i ,B)
• Approximate derivative as follows
V ′i = V ′
i ,F1{si,F>0} + V ′i ,B1{si,B<0} + V ′
i 1{si,F<0<si,B}
where 1{·} is indicator function, and V ′i = U ′(F (ki )− δki ).
• Where does V ′i term come from? Answer:
• since V is concave, V ′i ,F < V ′
i ,B (see figure) ⇒ si ,F < si ,B
• if s ′i ,F < 0 < s ′i ,B , set si = 0 ⇒ V ′(ki) = U ′(F (ki )− δki ), i.e.we’re at a steady state.
• Note: importantly avoids using the points i = 0 and i = I + 18 / 74

Iterative Method
• Idea: Solve FOC for given V n, update V n+1 according to
V n+1i − V n
i
∆+ρV n
i = U(cni )+(V n)′(ki )[F (ki )−δki −cni ] (∗)
• Algorithm: Guess V 0i , i = 1, ..., I and for n = 0, 1, 2, ... follow
1 Compute (V n)′(ki ) using FD approx. on previous slide.
2 Compute cn from cni = (U ′)−1[(V n)′(ki)]
3 Find V n+1 from (∗).4 If V n+1 is close enough to V n: stop. Otherwise, go to step 1.
• See MATLAB code
http://www.princeton.edu/~moll/HACTproject/HJB_NGM.m
• Important parameter: ∆ = step size, cannot be too large
(“CFL condition”).
9 / 74

Convergence
• Do we know this converges? yes if
1 upwind scheme done correctly
2 step size ∆ not too large
• References that prove this (hard to read... but easy to cite!):
• Barles and Souganidis (1991), “Convergence of approximationschemes for fully nonlinear second order equations.”
• Oberman (2006), “Convergent Difference Schemes forDegenerate Elliptic and Parabolic Equations: Hamilton-JacobiEquations and Free Boundary Problems.”
10 / 74

Efficiency: Implicit Method
• Pretty inefficient: I need 5,990 iterations (though super fast)
• Efficiency can be improved by using an “implicit method”
V n+1i − V n
i
∆+ ρV n+1
i = U(cni )+ (V n+1i )′(ki )[F (ki )− δki − cni ]
• Each step n involves solving a linear system of the form
(
(ρ+ 1∆)I− An
)
V n+1 = U(cn) + 1∆V n
• Advantage: step size ∆ can be much larger ⇒ more stable.
• Implicit method preferable in general.
11 / 74

The Magic of Upwind Schemes• No boundary conditions are needed!
• How is that possible? Don’t we know from MAT 101 thatsolving a first order ODE requires a boundary condition?
• Answer: in effect, we used the steady state as a boundarycondition: V ′(k∗) = U ′(c∗)
V ′(ki ) = U ′(c∗), ki = k∗
V ′(ki ) =Vi+1 − Vi
∆k, ki < k∗
V ′(ki ) =Vi − Vi−1
∆k, ki > k∗
• But we did it without having to actually calculate steadystate (never use F ′(k∗) = ρ+ δ equation). Code choosessteady state by itself.
• Upwind magic much more general: works for all stochasticmodels – do not even have steady state – e.g. Huggett.
12 / 74

Deeper Reason: Unique Viscosity Solution• basically there is a sense in which the HJB equation for theneoclassical growth model has a unique solution,independent of boundary conditions
• 3 Theorems (references two slides ahead)
• Theorem 1: HJB equation has unique “viscosity solution”
• Theorem 2: viscosity solution equals value function, i.e.solution to “sequence problem.”
• Theorem 3: FD method converges to unique “viscositysolution”, upwind scheme picks “viscosity solution”
• Comments• “viscosity solution” = bazooka, not really needed, designed for
non-differentiable PDEs
• Important for our purposes: uniqueness property
• typically, viscosity solution = “nice”, concave solution.Definition ⇒ doesn’t blow up, no convex kinks
13 / 74

Deeper Reason: Unique Viscosity Solution• basically there is a sense in which the HJB equation for theneoclassical growth model has a unique solution,independent of boundary conditions
• 3 Theorems (references two slides ahead)
• Theorem 1: HJB equation has unique “nice” solution
• Theorem 2: “nice” solution equals value function, i.e.solution to “sequence problem.”
• Theorem 3: FD method converges to unique “nice”
solution, upwind scheme picks “nice” solution
• Comments• “viscosity solution” = bazooka, not really needed, designed for
non-differentiable PDEs
• Important for our purposes: uniqueness property
• typically, viscosity solution = “nice”, concave solution.Definition ⇒ doesn’t blow up, no convex kinks
14 / 74

References for Theorems
• Theorems 1 and 2 originally due to Crandall and Lions(1983), “Viscosity Solutions of Hamilton-Jacobi Equations.”
• somewhat more accessible: book by Bardi andCapuzzo-Dolcetta (1997) “Optimal Control and ViscositySolutions of Hamilton-Jacobi-Bellman Equations”
• Theorem 3 originally due to Barles and Souganidis (1991)“Convergence of approximation schemes for fully nonlinearsecond order equations.”
15 / 74

Deeper Reason: Unique Viscosity Solution• What do I mean by unique solution, independent of
boundary conditions?
• Consider HJB equation for V (x) on [x0, x1].
• MAT 101: given a boundary condition V (x0) = θ, say, HJBhas a unique “classical” solution V classical(x)
• Theorem 1 basically says: there is a unique θ such thatV classical(x) is “nice.”
• Related: in neoclassical growth model and many other models• drift positive at lower end of state space
• drift negative at upper end of state space
• Since HJB equation is forward-looking, it cannot possiblymatter what happens at boundaries of state space:the HJB equation “does not see the boundary condition”
• exception: models with state constraints, e.g. Huggett. Butneed boundary condition only if state constraint binds.
16 / 74

General Lesson from all this
• the MAT 101 way is not the right way to think about HJB
equations, i.e. you don’t want to think of them as ODEs
that require boundary conditions!
17 / 74

Numerical Solution of Huggett Model
http://www.princeton.edu/~moll/HACTproject.htm
18 / 74

Kolmogorov Forward Equation
• Given HJB equation, solving KF equation is a piece of cake!
• Recall: solving HJB equation using implicit scheme involvessolving linear system
(
(ρ+ 1∆)I− An
)
vn+1 = U(cn) + 1∆vn
• Key: matrix An encodes evolution of stochastic process
• Stationary distribution simply solves
ATg = 0.
• For details see section 2 ofhttp://www.princeton.edu/~moll/HACTproject/numerical_MATLAB.pdf
19 / 74

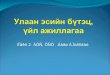
Saving and Wealth Distribution given r
Wealth, a
Savings,
si(a)
a
s1(a)
s2(a)
Wealth, a
Densities,
gi(a)
a
g1(a)
g2(a)
20 / 74

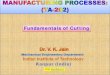
Generalization: Continuum of z-Types
0
5
10
15
20
25 0.5
1
1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Productivity, zWealth, a
Sav
ings
s(a
,z)
21 / 74

Generalization: Continuum of z-Types
22 / 74

Transition Dynamics
movie here
23 / 74

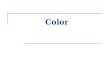
Generalization: Aiyagari, Transition
3
3.5
4
4.5
5
5.5
6
6.5
0 5 10 15 20 25 30 35 40 45 50
Capital, K(t)
Years, t
(a) Capital
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8
1.85
1.9
0 5 10 15 20 25 30 35 40 45 50
GDP, Y(t)
Years, t
(b) GDP
0.95
1
1.05
1.1
1.15
1.2
1.25
0 5 10 15 20 25 30 35 40 45 50
Wage, w(t)
Years, t
(c) Wage
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
0 5 10 15 20 25 30 35 40 45 50
Interest Rate, r(t)
Years, t
(d) Interest Rate24 / 74

Background: Diffusion Processes
25 / 74

Diffusion Processes
• A diffusion is simply a continuous-time Markov process (with
continuous sample paths, i.e. no jumps)
• Simplest possible diffusion: standard Brownian motion
(sometimes also called “Wiener process”)
• Definition: a standard Brownian motion is a stochastic
process W which satisfies
W (t +∆t)−W (t) = εt√∆t, εt ∼ N(0, 1), W (0) = 0
• Not hard to see
W (t) ∼ N(0, t)
• Continuous time analogue of a discrete time random walk:
Wt+1 = Wt + εt , εt ∼ N(0, 1)
26 / 74

Standard Brownian Motion
• Note: mean zero, E(W (t)) = 0...
• ... but blows up Var(W (t)) = t.27 / 74

Brownian Motion
• Can be generalized
x(t) = x(0) + µt + σW (t)
• Since E(W (t)) = 0 and Var(W (t)) = t
E[x(t)− x(0)] = µt, Var [x(t)− x(0)] = σ2t
• This is called a Brownian motion with drift µ and variance σ2
• Can write this in differential form as
dx(t) = µdt + σdW (t)
where dW (t) ≡ lim∆t→0 εt√∆t, with εt ∼ N(0, 1)
• This is called a stochastic differential equation
• Analogue of stochastic difference equation:
xt+1 = µt + xt + σεt , εt ∼ N(0, 1)
28 / 74

29 / 74

Further Generalizations: Diffusion
Processes
• Can be generalized further (suppressing dependence of x and
W on t)
dx = µ(x)dt + σ(x)dW
where µ and σ are any non-linear etc etc functions.
• This is called a “diffusion process”
• µ(·) is called the drift and σ(·) the diffusion.
• all results can be extended to the case where they depend on
t, µ(x , t), σ(x , t) but abstract from this for now.
• The amazing thing about diffusion processes: by choosing
functions µ and σ, you can get pretty much any
stochastic process you want (except jumps)
30 / 74

Example 1: Ornstein-Uhlenbeck Process
• Brownian motion dx = µdt + σdW is not stationary (random
walk). But the following process is
dx = θ(x − x)dt + σdW
• Analogue of AR(1) process, autocorrelation e−θ ≈ 1− θ
xt+1 = θx + (1− θ)xt + σεt
• That is, we just choose
µ(x) = θ(x − x)
and we get a nice stationary process!
• This is called an “Ornstein-Uhlenbeck process”
31 / 74

Ornstein-Uhlenbeck Process
• Can show: stationary distribution is N(x , σ2/(2θ))
32 / 74

Example 2: “Moll Process”
• Design a process that stays in the interval [0, 1] and
mean-reverts around 1/2
µ(x) = θ (1/2 − x) , σ(x) = σx(1− x)
dx = θ (1/2− x) dt + σx(1 − x)dW
• Note: diffusion goes to zero at boundaries σ(0) = σ(1) = 0 &
mean-reverts ⇒ always stay in [0, 1]
33 / 74

Other Examples
• Geometric Brownian motion:
dx = µxdt + σxdW
x ∈ [0,∞), no stationary distribution:
log x(t) ∼ N((µ − σ2/2)t, σ2t).
• Feller square root process (finance: “Cox-Ingersoll-Ross”)
dx = θ(x − x)dt + σ√xdW
x ∈ [0,∞), stationary distribution is Gamma(γ, 1/β), i.e.
f∞(x) ∝ e−βxxγ−1, β = 2θx/σ2, γ = 2θx/σ2
• Other processes in Wong (1964), “The Construction of a
Class of Stationary Markoff Processes.”34 / 74

Background: HJB Equations for
Diffusion Processes
35 / 74

Stochastic Optimal Control
• Generic problem:
V (x0) = maxu(t)∞t=0
E0
∫ ∞
0e−ρth (x (t) , u (t)) dt
subject to the law of motion for the state
dx(t) = g (x (t) , u (t)) dt + σ(x(t))dW (t) and u (t) ∈ U
for t ≥ 0, x(0) = x0 given.
• Deterministic problem: special case σ(x) ≡ 0.
• In general x ∈ Rm, u ∈ R
n. For now do scalar case.
36 / 74

Stochastic HJB Equation: Scalar Case
• Claim: the HJB equation is
ρV (x) = maxu∈U
h(x , u) + V ′(x)g(x , u) +1
2V ′′(x)σ2(x)
• Here: on purpose no derivation (“cookbook”)
• In case you care, see any textbook, e.g. chapter 2 in Stokey
(2008)
37 / 74

Just for Completeness: Multivariate Case
• Let x ∈ Rm, u ∈ R
n.
• For fixed x , define the m ×m covariance matrix
σ2(x) = σ(x)σ(x)′
(this is a function σ2 : Rm → Rm × R
m)
• The HJB equation is
ρV (x) = maxu∈U
h(x , u)+
m∑
i=1
∂iV (x)gi (x , u)+1
2
m∑
i=1
m∑
j=1
σ2ij(x)∂ijV (x)
• In vector notation
ρV (x) = maxu∈U
h(x , u)+∇xV (x)·g(x , u)+ 1
2tr(
∆xV (x)σ2(x))
• ∇xV (x): gradient of V (dimension m × 1)
• ∆xV (x): Hessian of V (dimension m ×m).
38 / 74

HJB Equation: Endogenous and
Exogenous State
• Lots of problems have the form x = (x1, x2)
• x1: endogenous state
• x2: exogenous state
dx1 = g(x1, x2, u)dt
dx2 = µ(x2)dt + σ(x2)dW
• Special case with
g(x) =
[
g(x1, x2, u)
µ(x2)
]
, σ(x) =
[
0
σ(x2)
]
• Claim: the HJB equation is
ρV (x1, x2) =maxu∈U
h(x1, x2, u) + ∂1V (x1, x2)g(x1, x2, u)
+∂2V (x1, x2)µ(x2) +1
2∂22V (x1, x2)σ
2(x2)39 / 74

Example 1: Real Business Cycle Model
V (k0,A0) = maxc(t)∞t=0
E0
∫ ∞
0e−ρtU(c(t))dt
subject to
dk = [AF (k)− δk − c]dt
dA = µ(A)dt + σ(A)dW
for t ≥ 0, k(0) = k0, A(0) = A0 given.
• Here: x1 = k , x2 = A, u = c
• h(x , u) = U(u)
• g(x , u) = F (x)− δx − u
40 / 74

Example 1: Real Business Cycle Model
• HJB equation is
ρV (k ,A) =maxc
U(c) + ∂kV (k ,A)[AF (k)− δk − c]
+ ∂AV (k ,A)µ(A) +1
2∂AAV (k ,A)σ2(A)
41 / 74

Example 2: Huggett Model
V (a0, z0) = maxc(t)∞t=0
E0
∫ ∞
0e−ρtU(c(t))dt s.t.
da = [z + ra − c]dt
dz = µ(z)dt + σ(z)dW
a ≥ a
for t ≥ 0, a(0) = a0, z(0) = z0 given.
• Here: x1 = k , x2 = z , u = c
• h(x , u) = U(u)
• g(x , u) = x2 + rx1 − u
42 / 74

Example 2: Huggett Model
• HJB equation is
ρV (a, z) =maxc
U(c) + ∂aV (a, z)[z + ra − c]
+ ∂zV (a, z)µ(z) +1
2∂zzV (a, z)σ2(z)
43 / 74

Example 2: Huggett Model
• Special Case 1: z is a geometric Brownian motion
dz = µzdt + σzdW
ρV (a, z) =maxc
U(c) + ∂aV (a, z)[z + ra − c]
+ ∂zV (a, z)µz +1
2∂zzV (a, z)σ2z2
• Special Case 2: z is a Feller square root process
dz = θ(z − z)dt + σ√zdW
ρV (a, z) =maxc
U(c) + ∂aV (a, z)[z + ra − c]
+ ∂zV (a, z)θ(z − z) +1
2∂zzV (a, z)σ2z
44 / 74

Background: Kolmogorov Forward
Equations
45 / 74

Kolmogorov Forward Equations
• Let x be a scalar diffusion
dx = µ(x)dt + σ(x)dW , x(0) = x0
• Suppose we’re interested in the evolution of the distribution
of x , f (x , t), and in particular in the limit limt→∞ f (x , t).
• Natural thing to care about especially in heterogenous agent
models
• Example 1: x = wealth
• µ(x) determined by saving behavior and return to investments
• σ(x) by return risk.
• microfound later
• Example 2: x = city size (Gabaix and others)
46 / 74

Kolmogorov Forward Equations
• Fact: Given an initial distribution f (x , 0) = f0(x), f (x , t)
satisfies the PDE
∂t f (x , t) = −∂x [µ(x)f (x , t)] +1
2∂xx [σ
2(x)f (x , t)]
• This PDE is called the “Kolmogorov Forward Equation”
• Note: in math this often called “Fokker-Planck Equation”
• Can be extended to case where x is a vector as well.
• Corollary: if a stationary distribution, limt→∞ f (x , t) = f (x)
exists, it satisfies the ODE
0 = − d
dx[µ(x)f (x)] +
1
2
d2
dx2[σ2(x)f (x)]
47 / 74

Just for Completeness: Multivariate Case
• Let x ∈ Rm.
• As before, define the m ×m covariance matrix
σ2(x) = σ(x)σ(x)′
• The Kolmogorov Forward Equation is
∂t f (x , t) = −m∑
i=1
∂i [µi(x)f (x , t)] +1
2
m∑
i=1
m∑
j=1
∂ij [σ2ij (x)f (x , t)]
48 / 74

Application: Stationary Distribution of
Huggett Model
• Recall Huggett model
ρV (a, z) =maxc
U(c) + ∂aV (a, z)[z + ra − c]
+ ∂zV (a, z)µ(z) +1
2∂zzV (a, z)σ2(z)
• Denote the optimal saving policy function by
s(a, z) = z + ra − c
• Then g(a, z , t) solves
∂tg(a, z , t) =− ∂a[s(a, z)g(a, z , t)]
− ∂z [µ(z)g(a, z , t)] +1
2∂zz [σ
2(z)g(a, z , t)]
49 / 74

Wealth Distribution and the
Business Cycle
50 / 74

What We Do
1 Do income and wealth distribution matter for themacroeconomy?
2 Do macroeconomic aggregates in heterogeneous agent
models with frictions behave like those in frictionlessrepresentative agent models?
Ask these questions in an economy in which
• heterogeneous producers
• face collateral constraints
• and fixed costs in production
51 / 74

Setup
• Continuum of entrepreneurs, heterogeneous in wealth a andproductivity z
• Continuum of productivity types, diffusion process
• For now: no workers, occupational choice etc
• Entrepreneurial preferences
E0
∫ ∞
0e−ρtu(ct)dt
52 / 74

Technologies
• Two technologies: productive and unproductive
y = fu(z ,A, k) = zAf (k),
y = fp(z ,A, k) =
{
zABf (k − κ), k ≥ κ
0, k < κ,
• B > 1, but fixed cost κ > 0
• f strictly increasing and concave, but fp non-convex
• Sources of uncertainty:
• z : idiosyncratic shock, diffusion process
• A: aggregate shock, two-state Poisson process
53 / 74

Setup
• Collateral constraints
k ≤ λa, λ ≥ 1.
• Profit maximization:
Π(a, z ,A; r) = max{Πu(a, z ,A; r),Πp(a, z ,A; r)}
Πj(a, z ,A; r) = maxk≤λa
fj(z ,A, k)− (r + δ)k , j = p, u.
• Entrepreneurs solve
max{ct}
E0
∫ ∞
0e−ρtu(ct)dt s.t.
dat = [Π(at , zt ,At ; rt) + rtat − ct ]dt
54 / 74

Plan
1 model without aggregate shocks, At = 1
2 model with aggregate shocks, At ∈ {Aℓ,Ah}, Poisson
55 / 74

Without Aggregate Shocks
• Capital market clearing:∫
[ku(a, z ;r(t))1{Πu>Πp} + kp(a, z ; r(t))1{Πu<Πp}]g(a, z , t)dadz
=
∫
ag(a, z , t)dadz
(EQ)
ρv(a, z , t) =maxc
u(c) + ∂av(a, z , t)[Π(a, z ; r(t)) + r(t)a − c] (HJB)
+ ∂zv(a, z , t)µ(z) +1
2∂zzv(a, z , t)σ
2(z) + ∂tv(a, z , t)
∂tg(a, z , t) =− ∂a[s(a, z , t)g(a, z , t)]− ∂z [µ(z)g(a, z , t)] (KFE)
+1
2∂zz [σ
2(z)g(a, z , t)],
s(a, z , t) = Π(a, z ; r(t)) + r(t)a − c(a, z , t)
Given initial condition g0(a, z), the two PDEs (HJB) and (KFE)together with (EQ) fully characterize equilibrium.
56 / 74

Dynamics of Wealth Distribution
movie here
57 / 74

Dynamics of Wealth Distribution
Productivity,z
Density,g(a,z,t)
Wealth,a
58 / 74

With Aggregate Shocks
• At ∈ {Aℓ,Ah}, Poisson with intensities φℓ, φh
• As in discrete time: necessary to include entire wealthdistribution as state variable
• Aggregate state: (Ai , g), i = ℓ, h
• Optimal saving policy function: si (a, z , g), i = ℓ, h
• Interest rate ri (g), i = ℓ, h
• Capital demands: ki ,u(a, z , g ; r) and ki ,p(a, z , g ; r), i = ℓ, h
• Equilibrium interest rate ri(g) solves∫
[ki ,u(a, z , g ;ri (g))1{Πu>Πp} + ki ,p(a, z , g ; ri (g))1{Πu<Πp}]g(a, z)dadz
=
∫
ag(a, z)dadz , i = ℓ, h
59 / 74

Entrepreneurs’ Problem
• Useful to write law of motion of distribution as
∂tg(a, z , t) = T [g(·, t), si (·, t)](a, z)
where T is the “Kolmogorov Forward operator”
T [g , si ](a, z) =− ∂a[si(a, z , g)g(a, z)]
− ∂z [µ(z)g(a, z)] +1
2∂zz [σ
2(z)g(a, z)]
60 / 74

Monster Bellman
• Entrepreneurs problem: recursive formulation
ρVi (a, z , g) = maxc
u(c) + ∂aVi (a, z , g)[Πi(a, z , g) + ri (g)a− c]
+ ∂zVi (a, z , g)µ(z) +1
2∂zzVi (a, z , g)σ
2(z)
+ φi [Vj(a, z , g)− Vi (a, z , g)]
+
∫
δVi (a, z , g)
δg(a, z)T [g , si ](a, z)dadz .
• δVi/δg(a, z): functional derivative of Vi wrt to g at (a, z).
• Saving policy function
si(a, z , g) = Πi (a, z , g) + ri (g)a − ci (a, z , g)
= Πi (a, z , g) + ri (g)a − (u′)−1(∂aVi(a, z , g)).
• Recursive equilibrium: solution to these two equations.
61 / 74

Approximation Method: Basic Idea
1 use discrete time approximation to A process
2 consider only finitely many shocks
3 keep track of all possible histories
4 between shocks: same (HJB) and (KFE) as without shocks,one system for each history
5 then piece them together in correct way
• Example:• 5 shocks at times t = 5, 10, 15, 20, 25
• 25 = 32 histories
62 / 74

Histories with 8 Shocks every 20 Periods
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
0 20 40 60 80 100 120 140 160 180 200
• Obvious problem: blows up on you, e.g. 28 = 256.
• Working on: using this approximation as input into fancierapproximation scheme
• but the economics seems robust to me, will bet anyone whothinks that things will change a lot
63 / 74

Approximation Method: Details
• N shocks hit at times tn = ∆n, n = 0, 1, 2, ...,N
• Approximate Poisson process
Pr(An+1 = Ai |An = Ai) = 1− e−φi∆
Pr(An+1 = Aj |An = Ai) = e−φi∆
converges to Poisson as ∆ → 0 and N → ∞.
• Denote histories by An = (A0, ..., An) where An ∈ {Aℓ,Ah}
• Keep track of all
v(a, z , t, An) and g(a, z , t, An)
64 / 74

Approximation Method: DetailsBetween shocks: for all histories An
ρv(a, z , t, An) =maxc
u(c) + ∂av(a, z , t, An)[Π(a, z , t, An) + r(t, An)a− c]
+ ∂zv(a, z , t, An)µ(z) +
1
2∂zzv(a, z , t, A
n)σ2(z) + ∂tv(a, z , t, A
∂tg(a, z , t, An) =− ∂a[s(a, z , t, A
n)g(a, z , t, An)]
− ∂z [µ(z)g(a, z , t, An)] +
1
2∂zz [σ
2(z)g(a, z , t, An)]
Boundary conditions: at all times when shocks hit tn:
v(
a, z , tn+1, An)
=∑
An+1=Aℓ,Ah
Pr(An+1|An)v(
a, z , tn+1, An+1
)
g(
a, z , tn+1, An+1
)
= g(
a, z , tn+1, An)
, all An.
Note: uses
1 people forward-looking, form expectations over all branches2 continuity of g with respect to t (state variable)
65 / 74

The Experiments
• Experiment 1: comparison to rep. agent model
• two economies: economy with frictions and rep. agent
• at t = 0, both in steady state (corresponding to no A shocks)
• at t = 10, hit with A shock, compare impulse responses
• Experiment 2: effect of wealth distribution
• two economies with frictions: one more unequal than the other
• at t = 0, both in steady state (corresponding to no A shocks)
• at t = 10, hit with A shock, compare impulse responses
66 / 74

The Corresponding Representative Agent
• RBC model with utility function u(c) and followingaggregate production function
F (K ,A) = max{k(z)}
∫
max{fu(z ,A, k(z)), fp(z ,A, k(z))}ψ(z)dz s.t.
∫
k(z)ψ(z)dz ≤ K
where ψ(z) is the stationary distribution of the z-process.
• Solution:
F (K ,A) = maxz
AZ (z)(K − κ(1−Ψ(z)))α
Z (z) ≡(∫ z
0z
11−αψ(z)dz + B
11−α
∫ ∞
z
z1
1−αψ(z)dz
)1−α
67 / 74

Parameterization
• Functional forms
u(c) =c1−γ
1− γ, f (k) = kα
• Productivity process: Ornstein-Uhlenbeck
d log zt = −ν log zt + σdWt
but reflected at z , z ≥ 0.
• Parameter values
B = 1.8, α = 0.6, δ = 0.05, κ = 6, λ = 2,
ρ = 0.05, γ = 2, ν = 0.2, σz = 0.1
Ah = 1, Aℓ = 0.95
a = 0, a = 30, z = 0.6, z = 1.4, T = 100
68 / 74

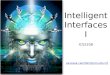
Frictions ⇒ much Slower Recovery
0 10 20 30 400.94
0.95
0.96
0.97
0.98
0.99
1
1.01
Years
(a) Productivity, At
0 10 20 30 400.93
0.94
0.95
0.96
0.97
0.98
0.99
1
Years
(b) Capital Stock, K t
0 10 20 30 400.92
0.94
0.96
0.98
1
1.02
Years
(c) GDP, Y t
0 10 20 30 40
0.04
0.045
0.05
0.055
Years
(d) Interest Rate , r t
Frictionlesswith Frictions
Frictionlesswith Frictions
Frictionlesswith Frictions
Frictionlesswith Frictions
Note: GDP and interest rate computations currently imprecise69 / 74

Dynamics of Wealth Distribution
movie here
70 / 74

Wealth Distribution at Peak
Productivity,z
Density,g(a,z,t)
Year = 10
Wealth,a
71 / 74

Wealth Distribution at Trough
Productivity,z
Density,g(a,z,t)
Year = 20
Wealth,a
72 / 74

Wealth Distribution 10 Years after Trough
Productivity,z
Density,g(a,z,t)
Year = 30
Wealth,a
73 / 74

Next Steps
• Redistributive policies?
• Add workers, occupational choice
• Fancier approximation• computations suggest: densities live in relatively
low-dimensional space
• project densities on that space
• use as state variable in value function
• What else?
74 / 74