Embed Size (px)
Citation preview
Lecture 2 - Silvio Savarese 8-‐Jan-‐15
Professor Silvio Savarese Computa(onal Vision and Geometry Lab
Lecture 2 Camera Models
Lecture 2 - Silvio Savarese 10-‐Jan-‐15
• Pinhole cameras • Cameras & lenses • The geometry of pinhole cameras
Lecture 2 Camera Models
Reading: [FP] Chapter 1, “Geometric Camera Models” [HZ] Chapter 6 “Camera Models”
Some slides in this lecture are courtesy to Profs. J. Ponce, S. Seitz, F-F Li
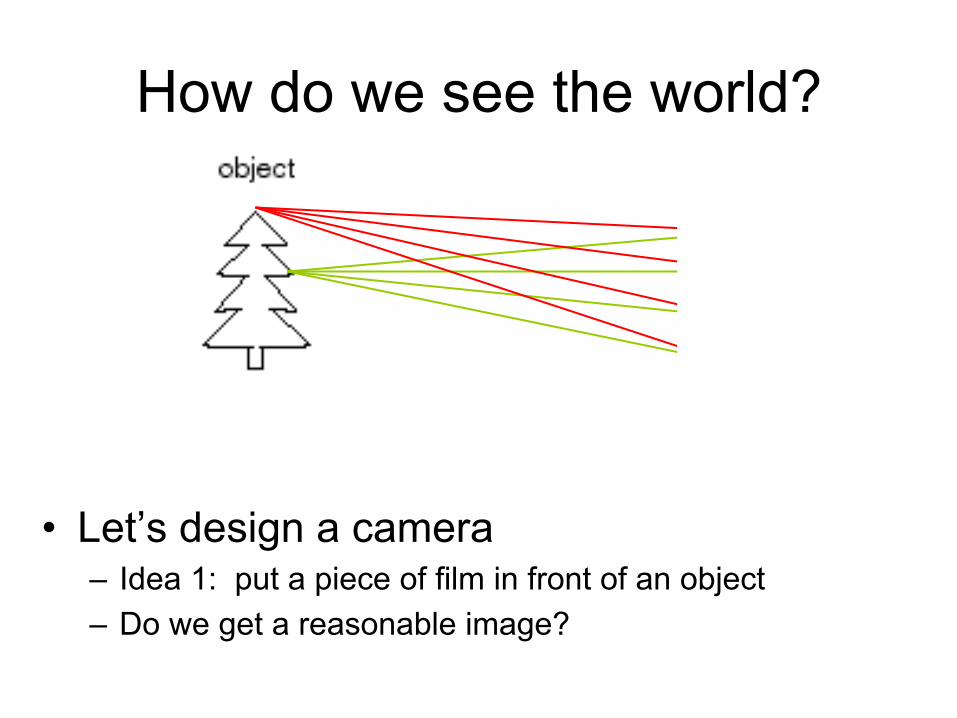
How do we see the world?
• Let’s design a camera – Idea 1: put a piece of film in front of an object – Do we get a reasonable image?
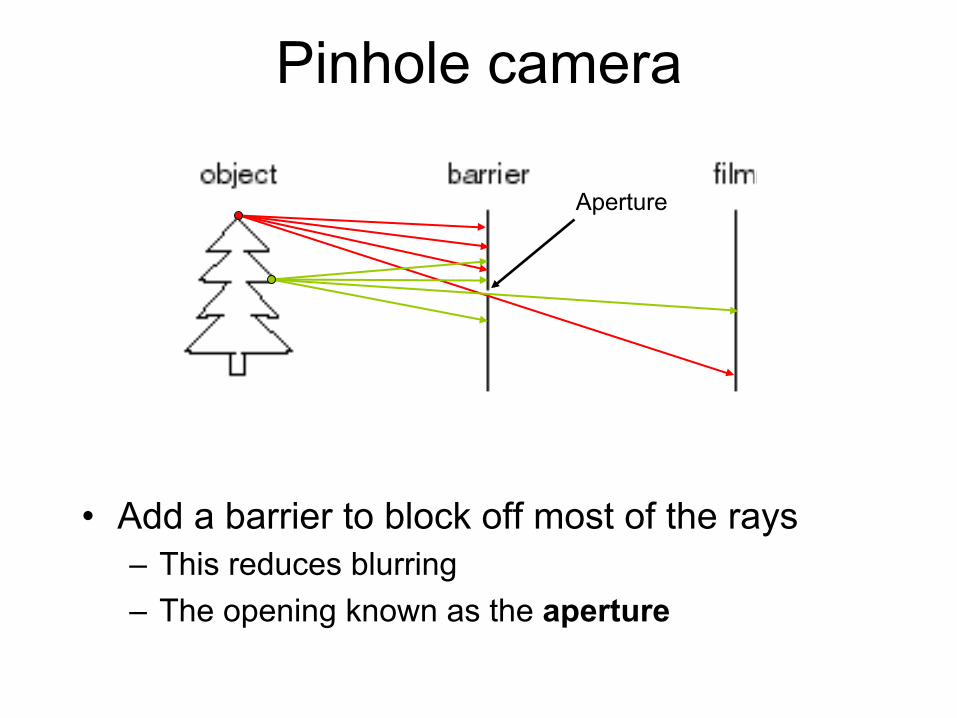
Pinhole camera
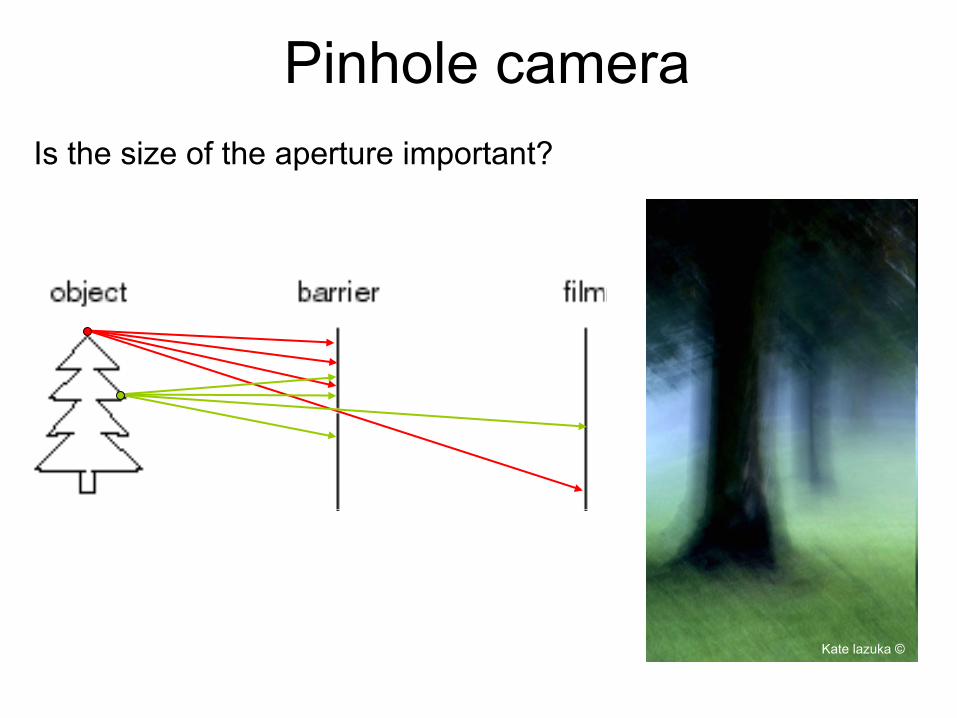
• Add a barrier to block off most of the rays – This reduces blurring – The opening known as the aperture
Aperture
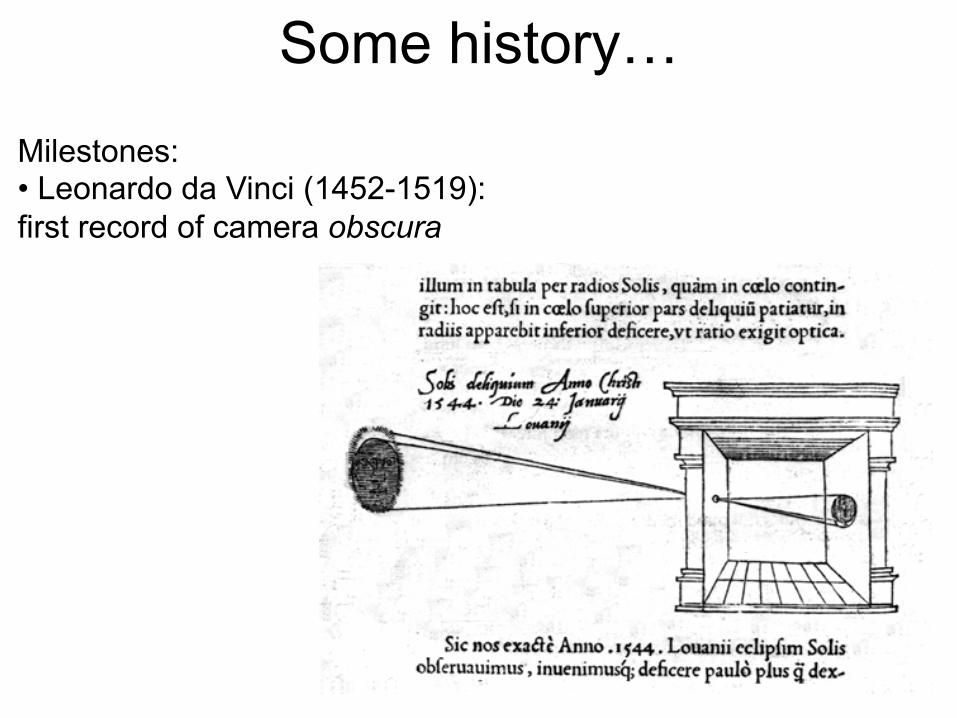
Milestones: • Leonardo da Vinci (1452-1519): first record of camera obscura
Some history…
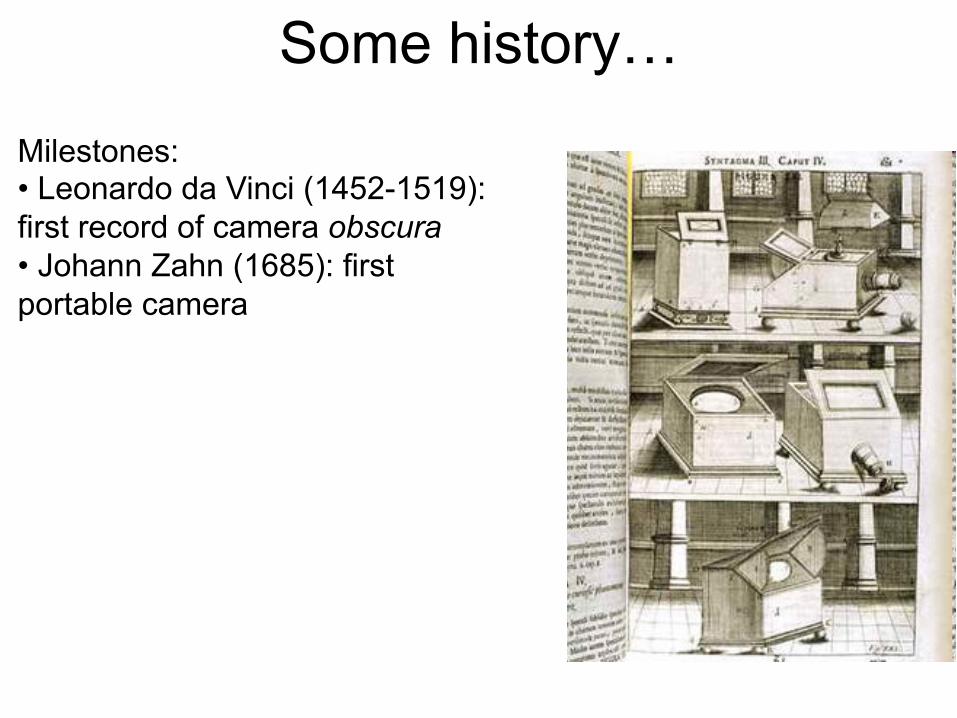
Milestones: • Leonardo da Vinci (1452-1519): first record of camera obscura • Johann Zahn (1685): first portable camera
Some history…
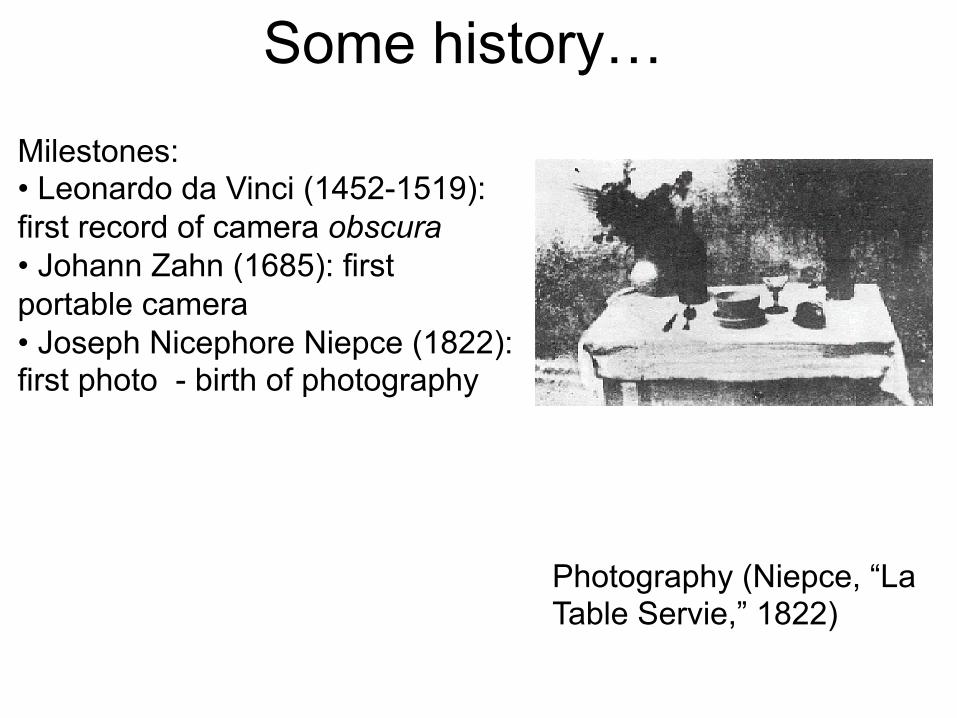
Photography (Niepce, “La Table Servie,” 1822)
Milestones: • Leonardo da Vinci (1452-1519): first record of camera obscura • Johann Zahn (1685): first portable camera • Joseph Nicephore Niepce (1822): first photo - birth of photography
Some history…
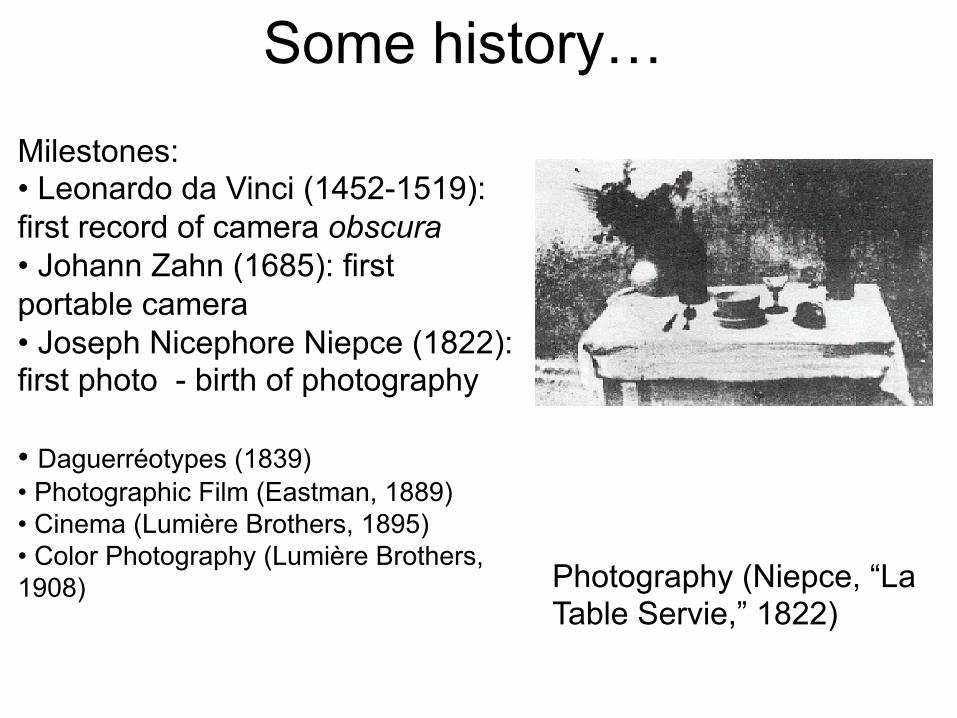
Photography (Niepce, “La Table Servie,” 1822)
Milestones: • Leonardo da Vinci (1452-1519): first record of camera obscura • Johann Zahn (1685): first portable camera • Joseph Nicephore Niepce (1822): first photo - birth of photography
• Daguerréotypes (1839) • Photographic Film (Eastman, 1889) • Cinema (Lumière Brothers, 1895) • Color Photography (Lumière Brothers, 1908)
Some history…
Let’s also not forget…
Motzu (468-376 BC)
Aristotle (384-322 BC)
Also: Plato, Euclid
Al-Kindi (c. 801–873) Ibn al-Haitham
(965-1040) Oldest existent book on geometry
in China
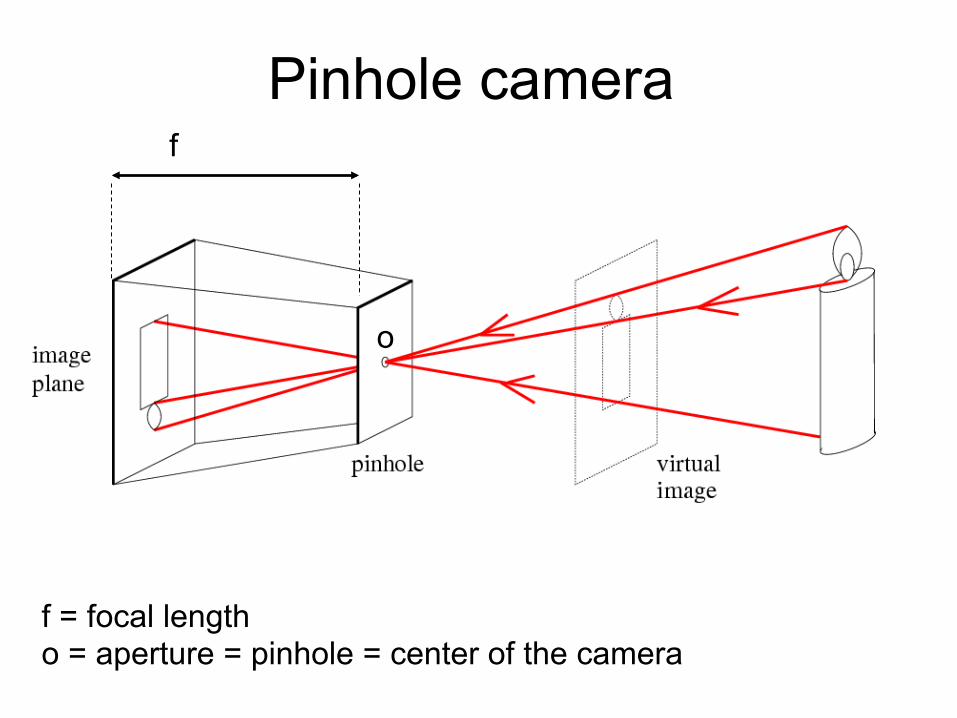
Pinhole perspective projection Pinhole camera f
f = focal length o = aperture = pinhole = center of the camera
o
⎪⎪⎩
⎪⎪⎨
⎧
=
=
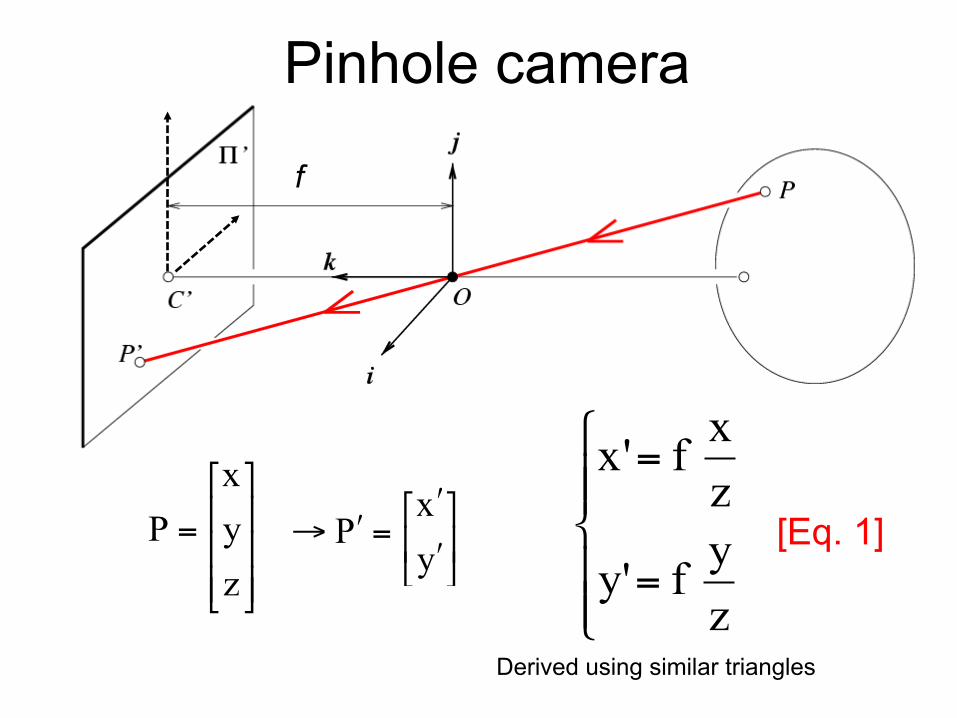
zyf'y
zxf'x
⎥⎦
⎤⎢⎣
⎡ʹ′
ʹ′=ʹ′→yx
P⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
zyx
P
Pinhole camera
Derived using similar triangles
[Eq. 1]
f
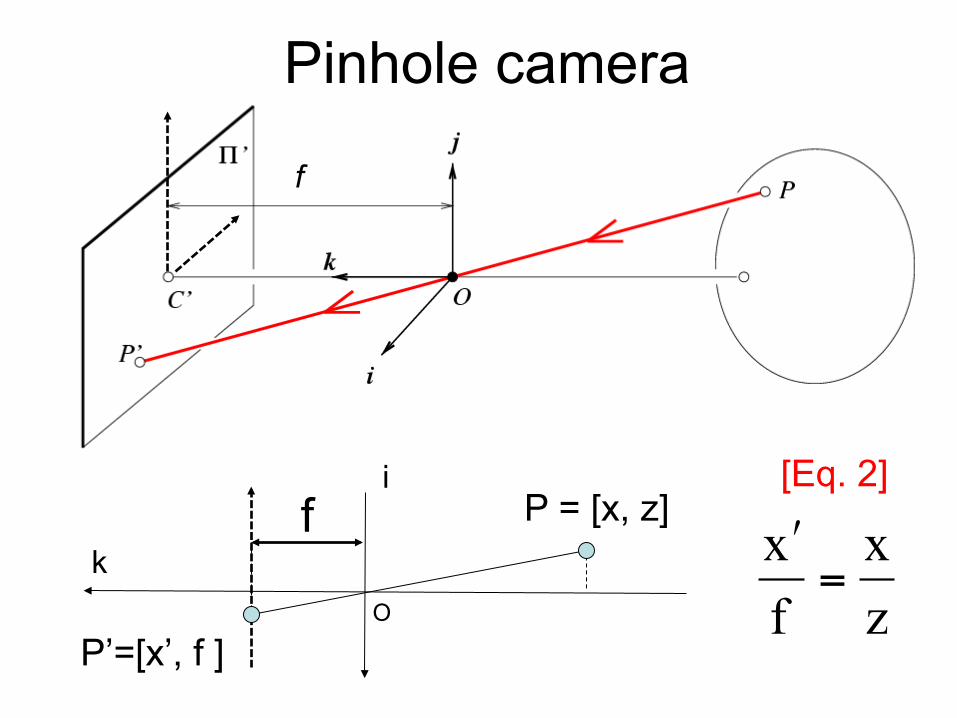
O
P = [x, z]
P’=[x’, f ]
f
zx
fx=ʹ′
i
k
Pinhole camera
[Eq. 2]
f
Kate lazuka ©
Pinhole camera Is the size of the aperture important?
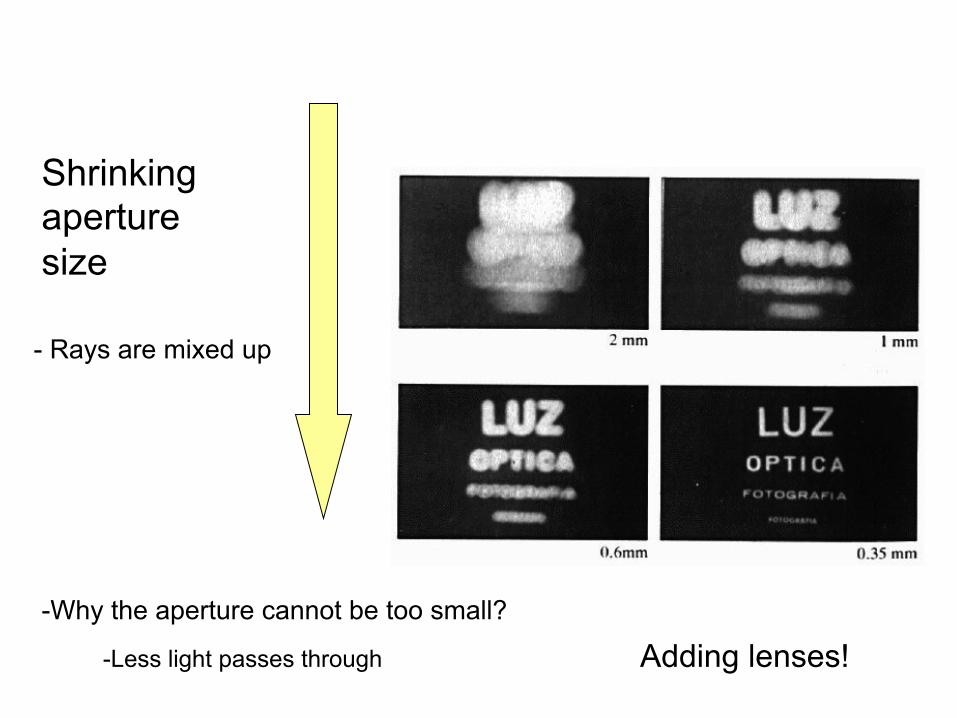
Shrinking aperture size
- Rays are mixed up
Adding lenses! - Why the aperture cannot be too small?
- Less light passes through
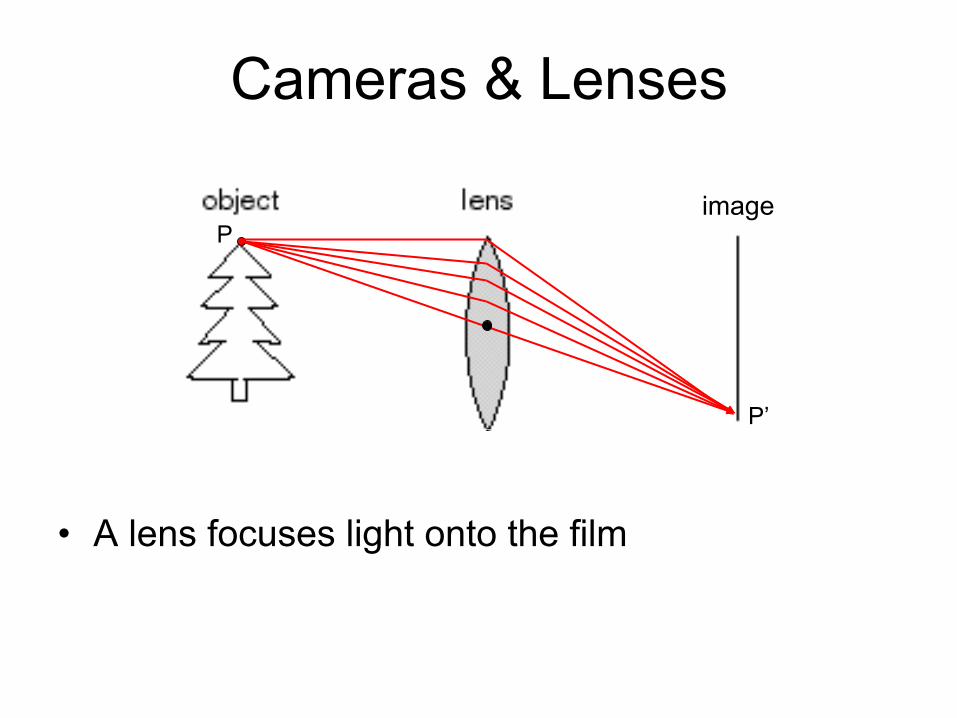
Cameras & Lenses
• A lens focuses light onto the film
image P
P’
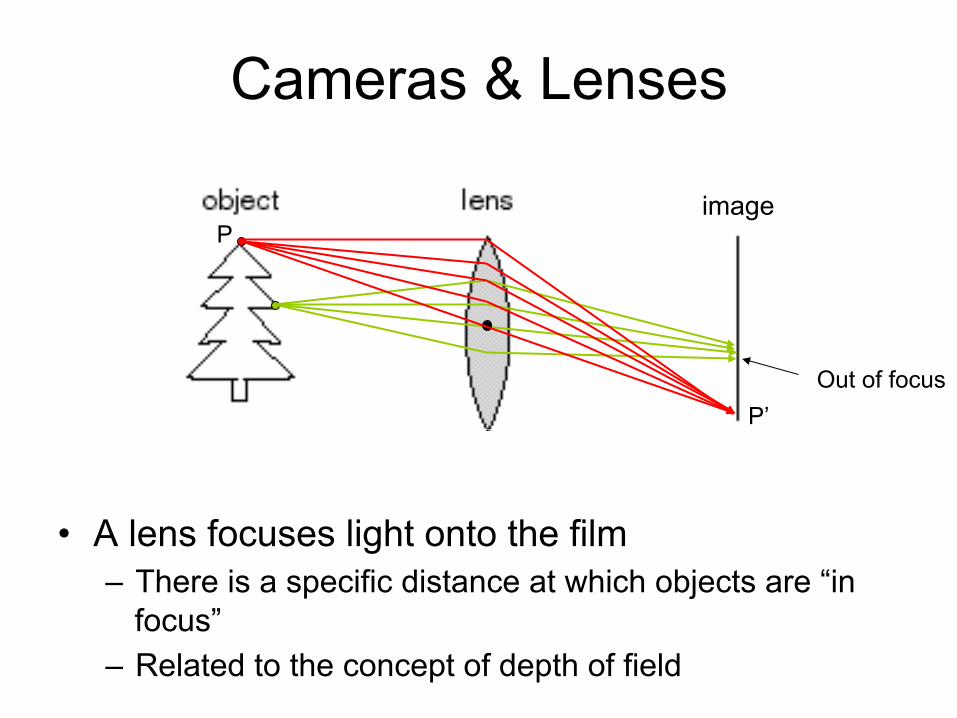
• A lens focuses light onto the film – There is a specific distance at which objects are “in
focus” – Related to the concept of depth of field
Out of focus
Cameras & Lenses
image P
P’
• A lens focuses light onto the film – There is a specific distance at which objects are “in
focus” – Related to the concept of depth of field
Cameras & Lenses
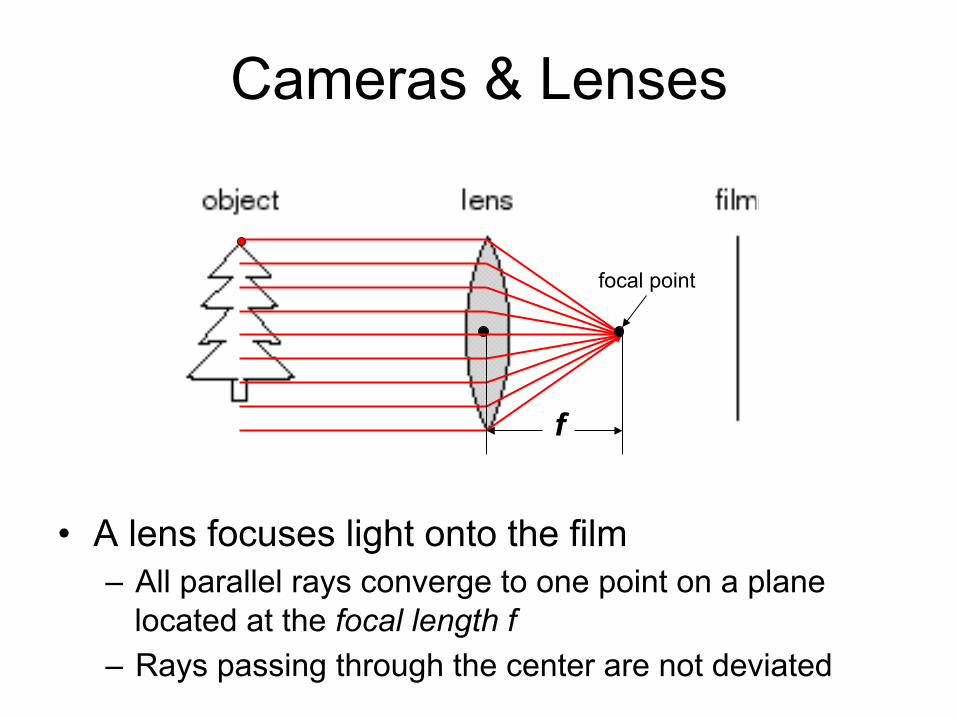
• A lens focuses light onto the film – All parallel rays converge to one point on a plane
located at the focal length f – Rays passing through the center are not deviated
focal point
f
Cameras & Lenses
f
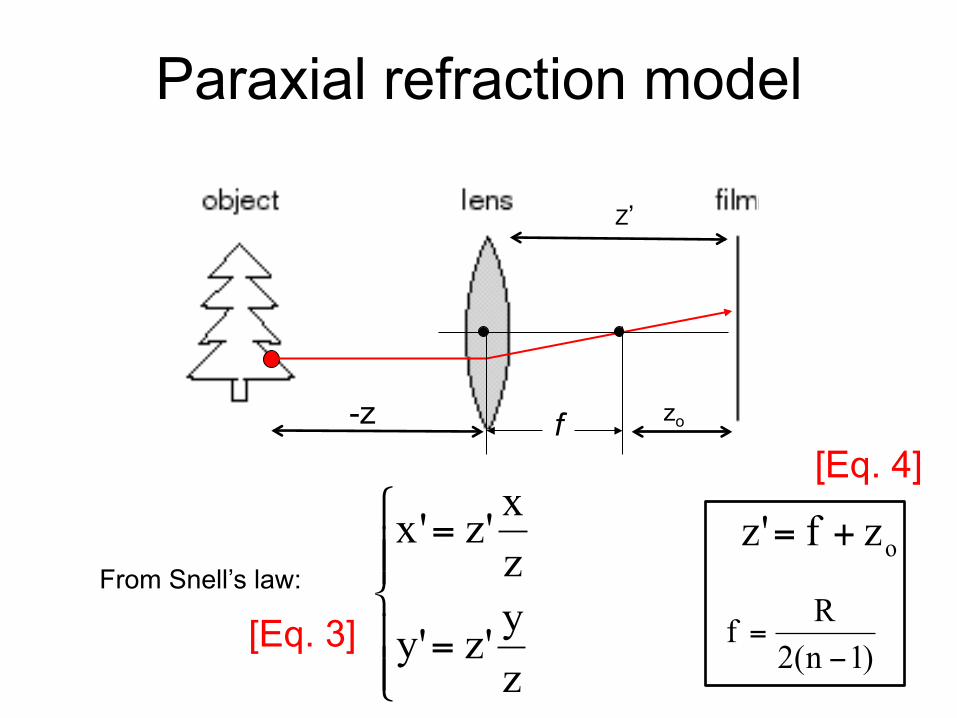
Paraxial refraction model
zy'z'y
zx'z'x
⎪⎪⎩
⎪⎪⎨
⎧
=
= ozf'z +=
)1n(2Rf −
=
zo -z
Z’
From Snell’s law:
[Eq. 3]
[Eq. 4]
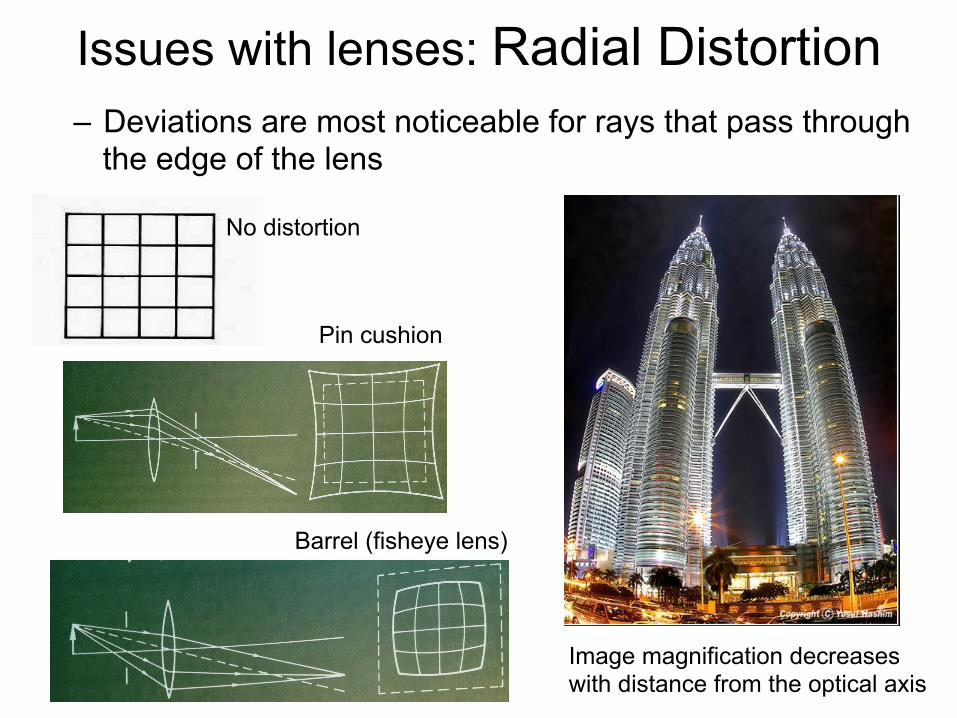
No distortion
Pin cushion
Barrel (fisheye lens)
Issues with lenses: Radial Distortion – Deviations are most noticeable for rays that pass through
the edge of the lens
Image magnification decreases with distance from the optical axis
Lecture 2 - Silvio Savarese 8-‐Jan-‐15
• Pinhole cameras • Cameras & lenses • The geometry of pinhole cameras
• Intrinsic • Extrinsic
Lecture 2 Camera Models
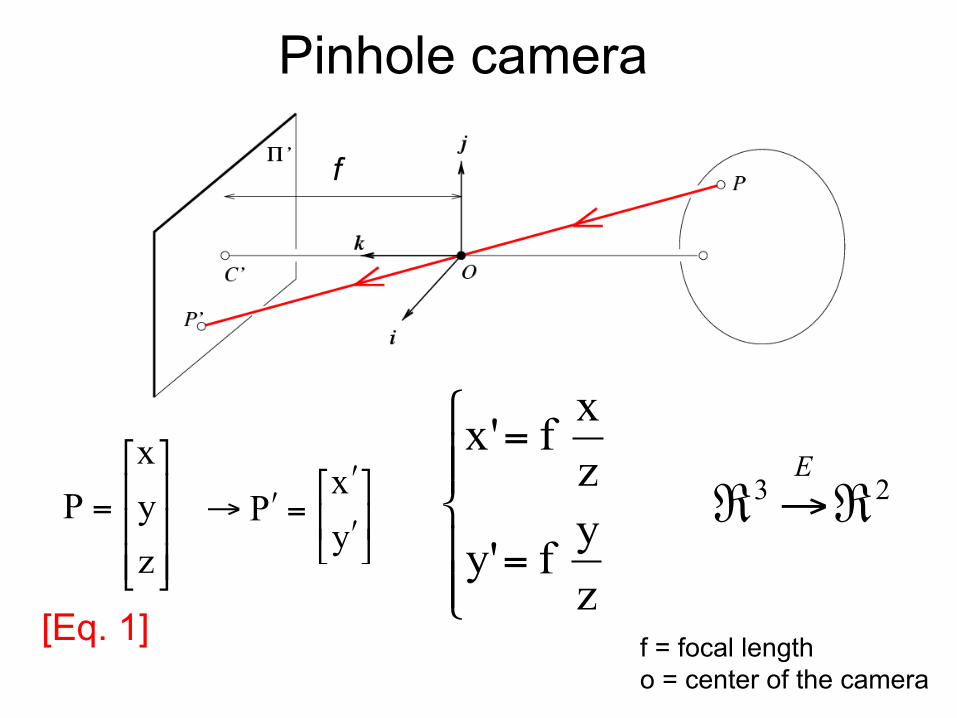
Pinhole perspective projection Pinhole camera
f = focal length o = center of the camera
23 ℜ→ℜE
⎪⎪⎩
⎪⎪⎨
⎧
=
=
zyf'y
zxf'x
⎥⎦
⎤⎢⎣
⎡ʹ′
ʹ′=ʹ′→yx
P⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
zyx
P
[Eq. 1]
f
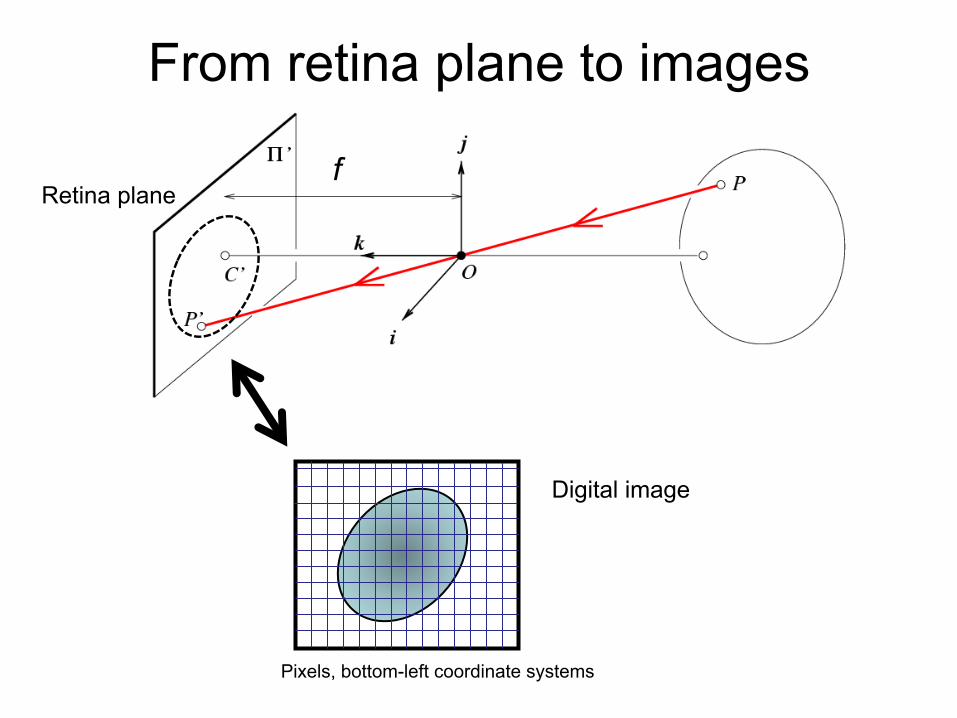
From retina plane to images
Pixels, bottom-left coordinate systems
f Retina plane
Digital image
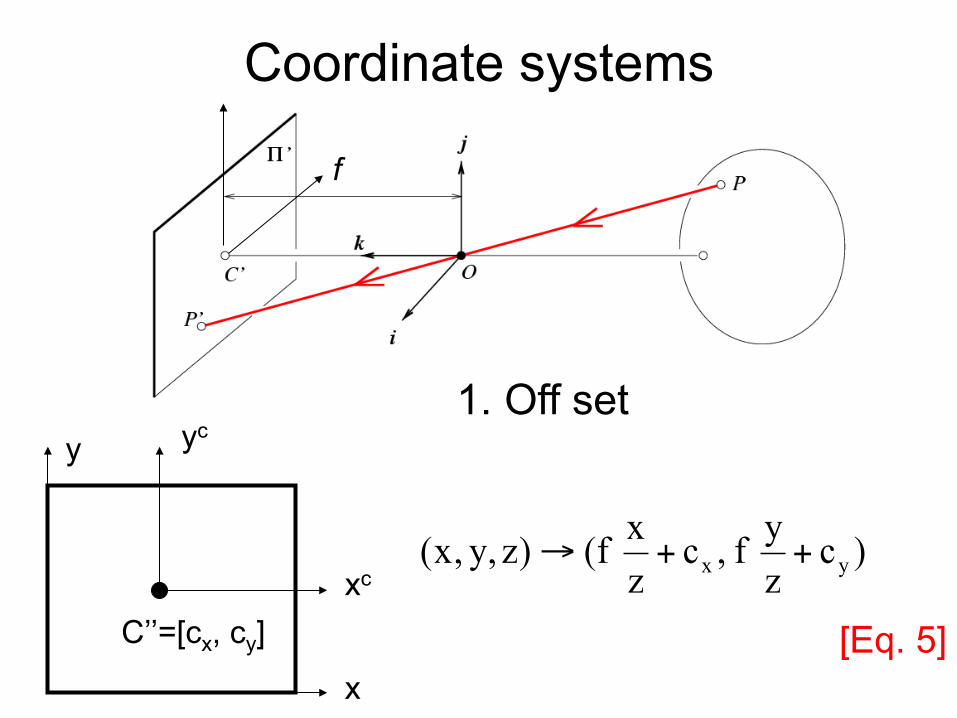
Coordinate systems
f
x
y
xc
yc
C’’=[cx, cy]
)czyf,c
zxf()z,y,x( yx ++→
1. Off set
[Eq. 5]
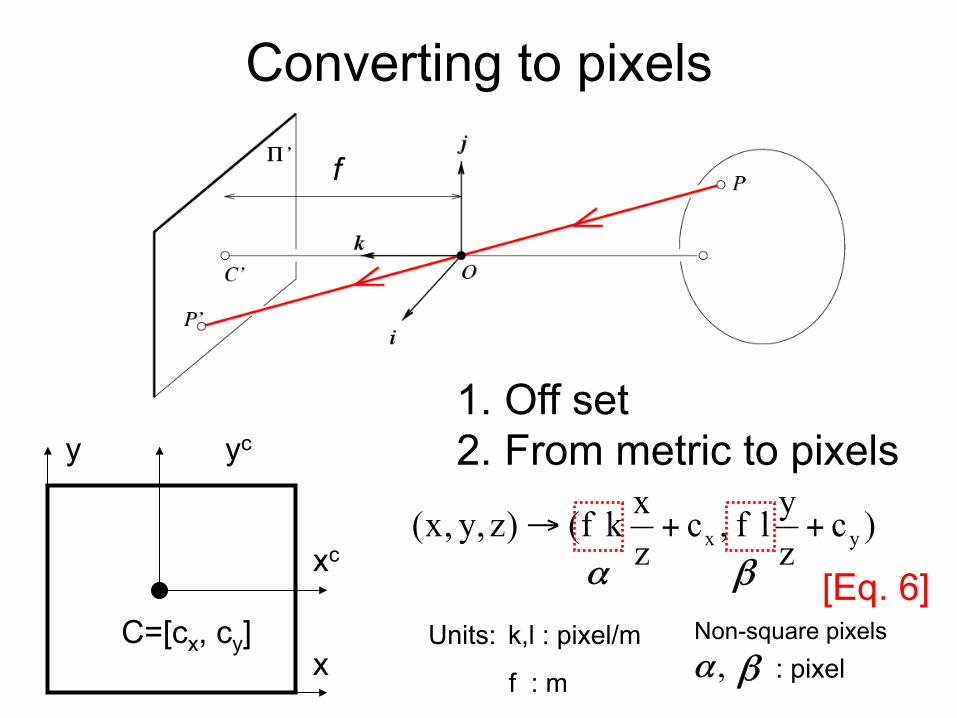
Converting to pixels
)czylf,c
zxkf()z,y,x( yx ++→
1. Off set 2. From metric to pixels
x
y
xc
yc
C=[cx, cy] Units: k,l : pixel/m
f : m : pixel
α β
,α βNon-square pixels
f
[Eq. 6]
• Is this a linear transformation?
x
y
xc
yc
C=[cx, cy]
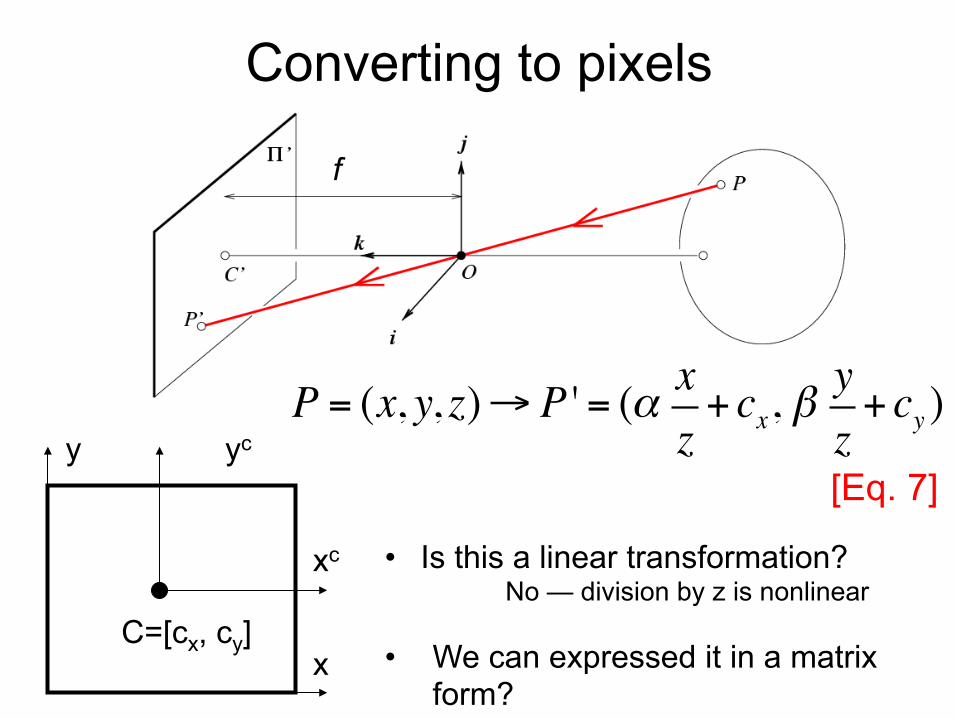
P = (x, y, z)→ P ' = (α xz+ cx, β
yz+ cy )
Converting to pixels
f
[Eq. 7]
No — division by z is nonlinear
• We can expressed it in a matrix form?
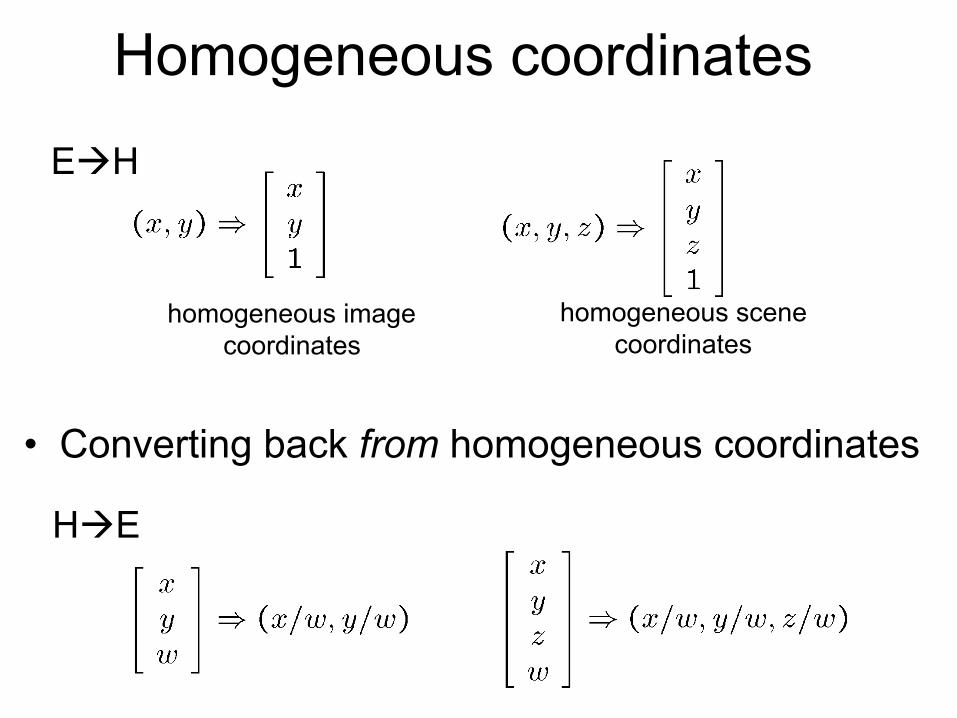
Homogeneous coordinates
homogeneous image coordinates
homogeneous scene coordinates
• Converting back from homogeneous coordinates
EàH
HàE
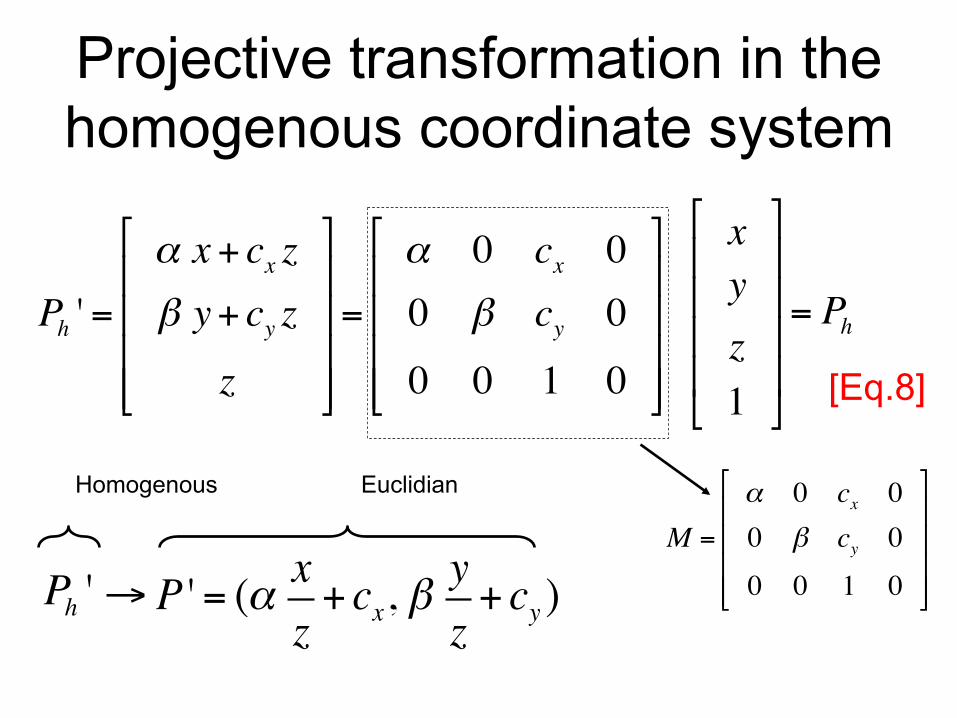
Projective transformation in the homogenous coordinate system
xyz1
!
"
####
$
%
&&&&
= Ph
M =
α 0 cx 00 β cy 0
0 0 1 0
!
"
####
$
%
&&&&
[Eq.8]
→ P ' = (α xz+ cx, β
yz+ cy )Ph '
Homogenous Euclidian
Ph ' =α x + cx zβ y+ cy z
z
!
"
####
$
%
&&&&
=
α 0 cx 00 β cy 0
0 0 1 0
!
"
####
$
%
&&&&
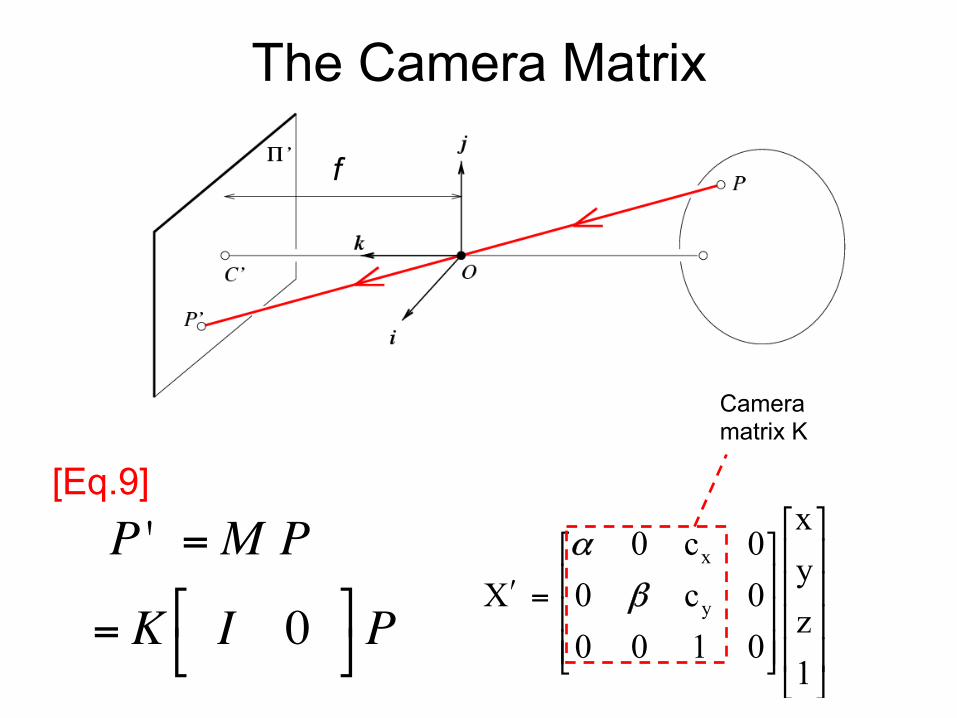
P ' =M P
= K I 0!"
#$P
The Camera Matrix
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=ʹ′
1zyx
01000c00c0
X y
x
β
α
Camera matrix K
f
[Eq.9]
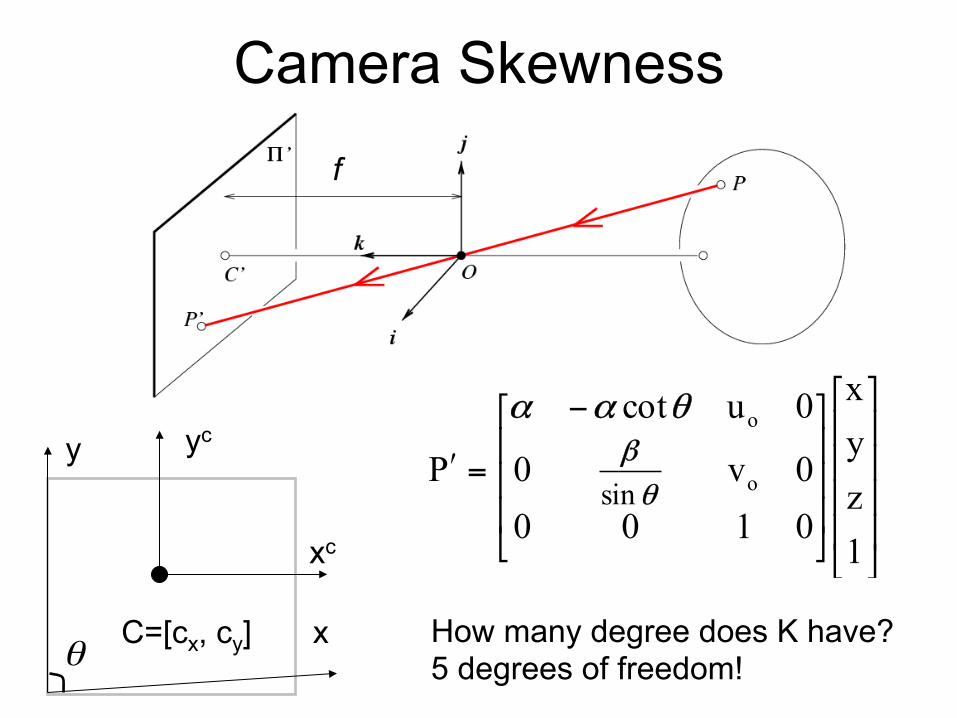
Camera Skewness
x
y
xc
yc
C=[cx, cy] θHow many degree does K have? 5 degrees of freedom!
f
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
=ʹ′
1zyx
01000v0
0ucot
P o
o
sinθβ
θαα
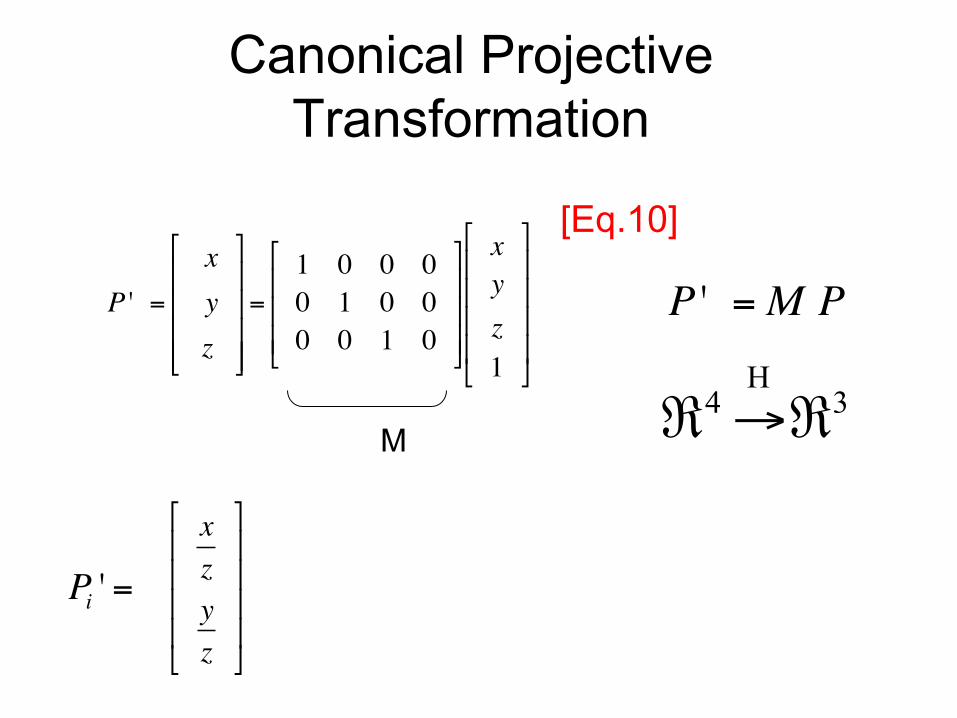
Canonical Projective Transformation
P ' =xyz
!
"
####
$
%
&&&&
=1 0 0 00 1 0 00 0 1 0
!
"
###
$
%
&&&
xyz1
!
"
####
$
%
&&&&
xzyz
!
"
####
$
%
&&&&
Pi ' =
P ' =M P
M 3
H4 ℜ→ℜ
[Eq.10]

Lecture 2 - Silvio Savarese 8-‐Jan-‐15
• Pinhole cameras • Cameras & lenses • The geometry of pinhole cameras
• Intrinsic • Extrinsic
• Other camera models
Lecture 2 Camera Models
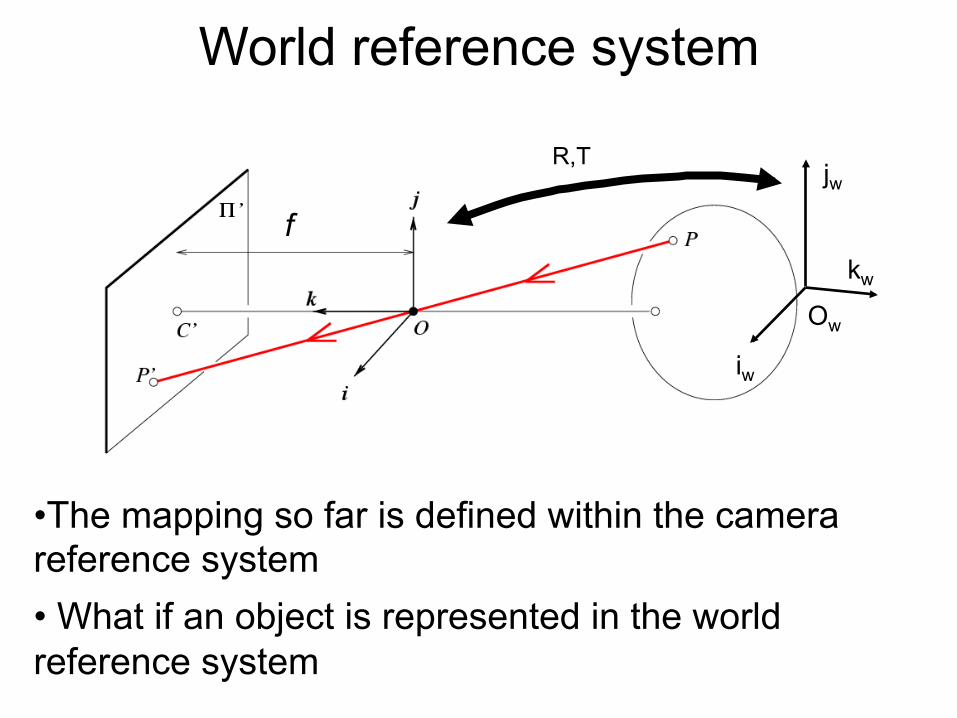
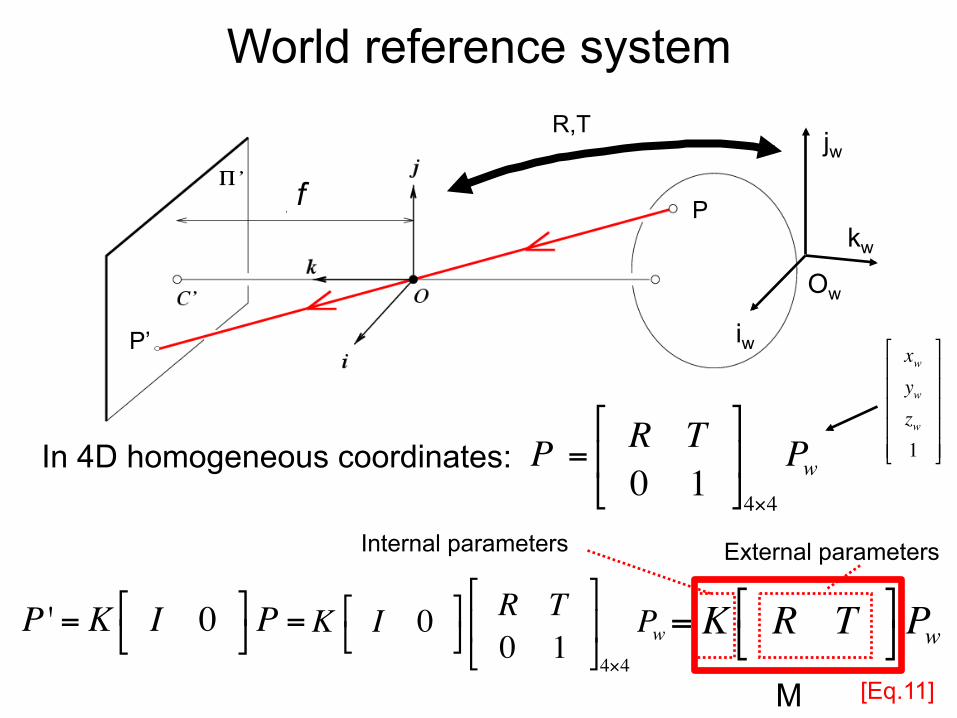
World reference system
Ow
iw
kw
jw R,T
• The mapping so far is defined within the camera reference system • What if an object is represented in the world reference system
f
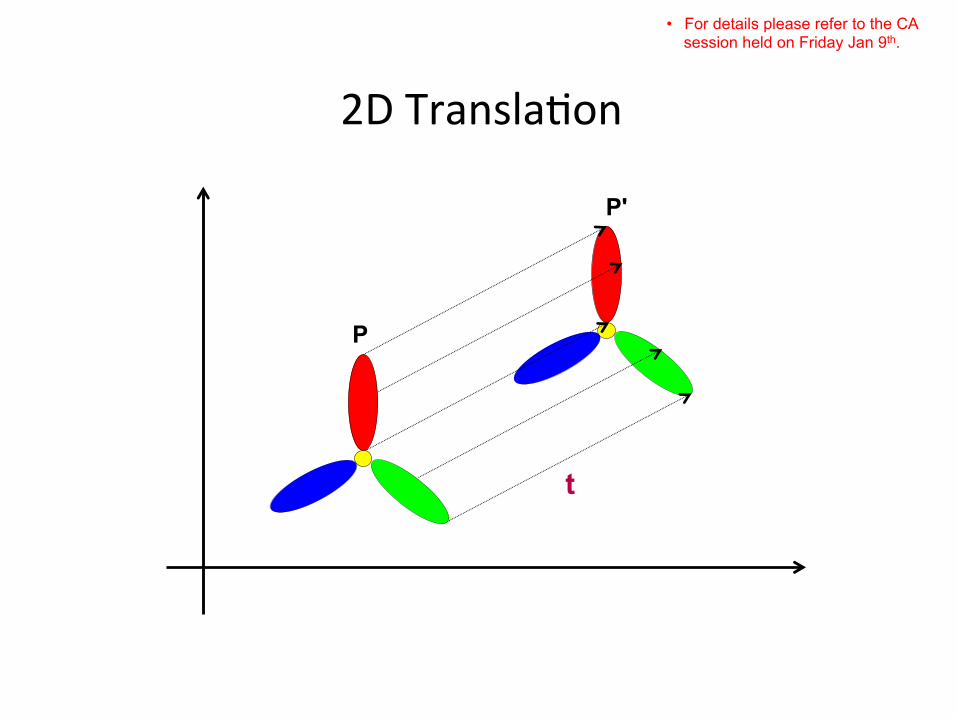
2D TranslaUon
P
P'
t
• For details please refer to the CA session held on Friday Jan 9th.
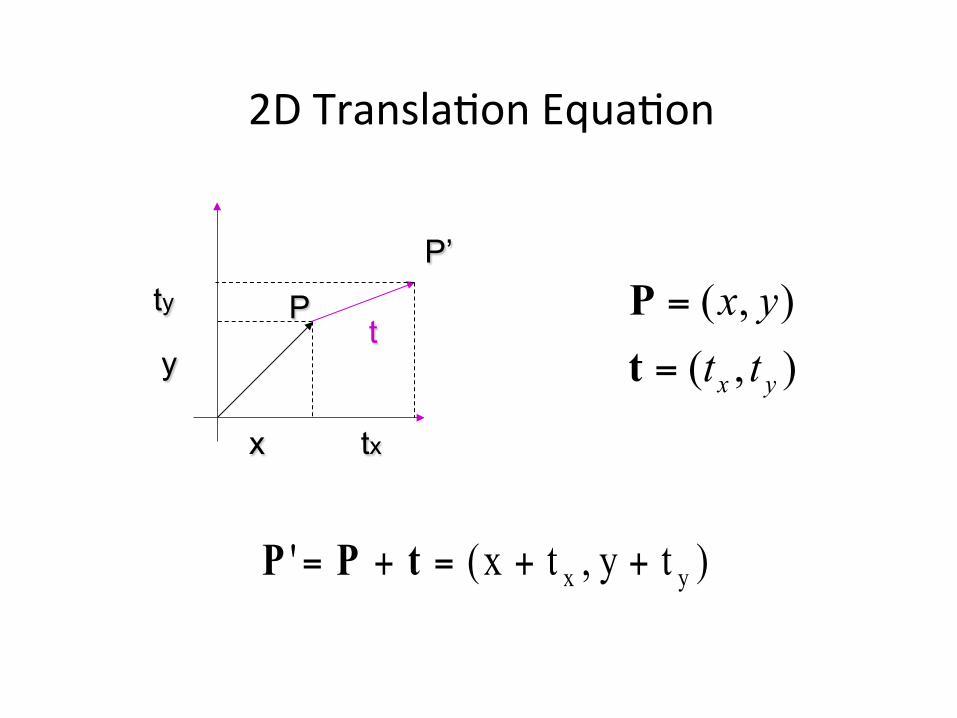
2D TranslaUon EquaUon
P
x
y
tx
ty
P’
t
)ty,tx(' yx ++=+= tPP
),(),(
yx ttyx
=
=
tP
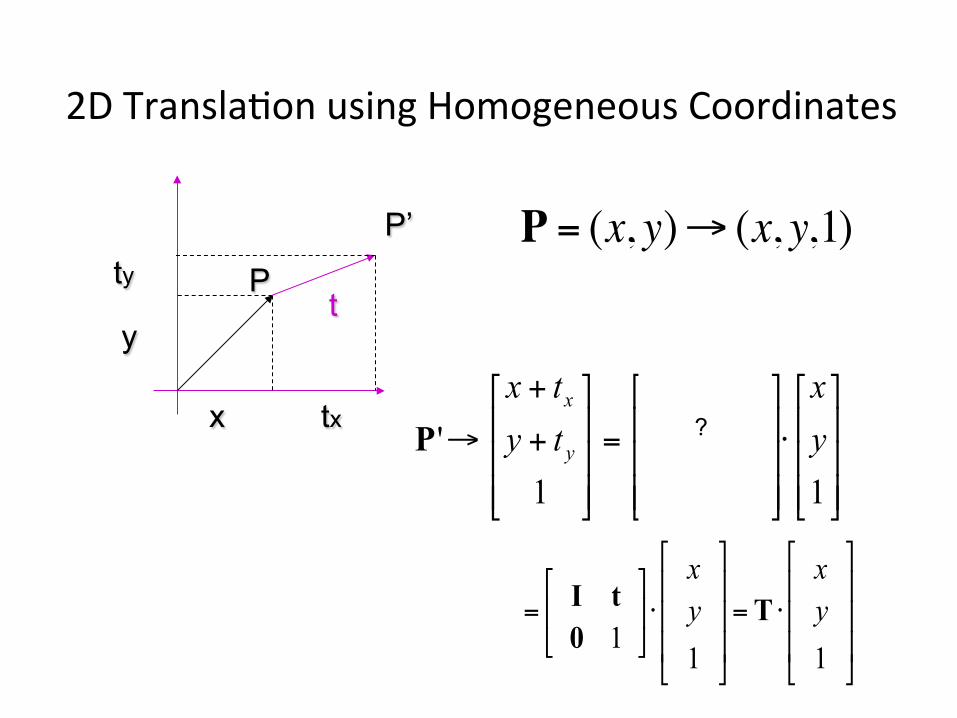
2D TranslaUon using Homogeneous Coordinates
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
+
→
11001001
1' y
xtt
tytx
y
x
y
x
P
P = (x, y)→ (x, y,1)
= I t0 1
!
"#
$
%&⋅
xy1
!
"
###
$
%
&&&=T ⋅
xy1
!
"
###
$
%
&&&
P
x
y
tx
ty
P’
t
?

Scaling
P
P'
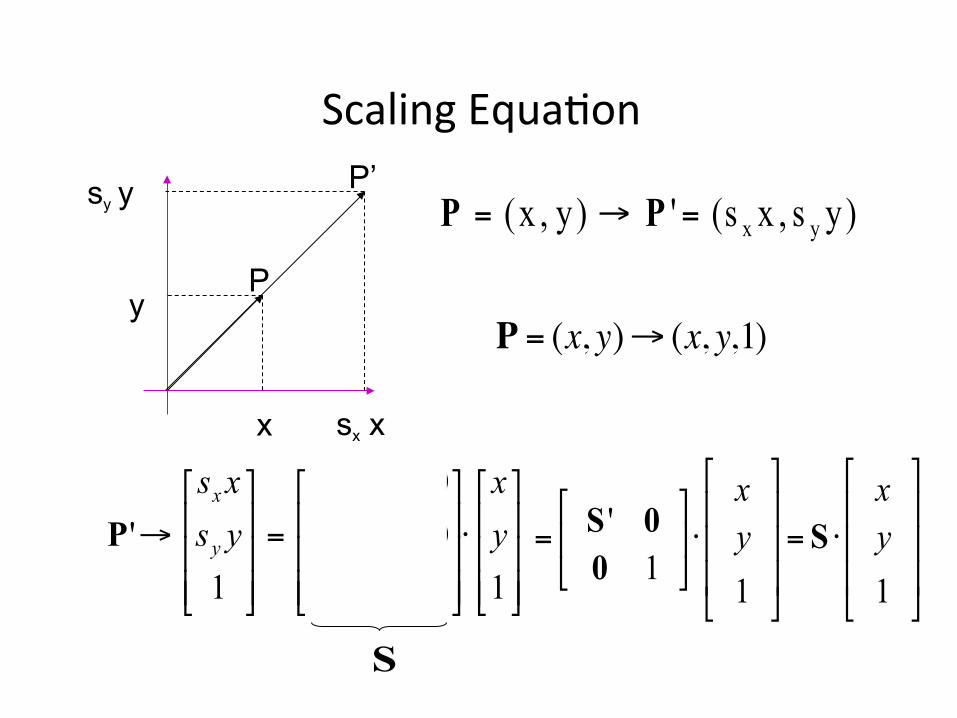
Scaling EquaUon
P
x
y
sx x
P’ sy y
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
→
11000000
1' y
xs
sysxs
y
x
y
x
P
P = (x, y)→ (x, y,1)
S
= S ' 00 1
!
"#
$
%&⋅
xy1
!
"
###
$
%
&&&= S ⋅
xy1
!
"
###
$
%
&&&
)ys,xs(')y,x( yx=→= PP
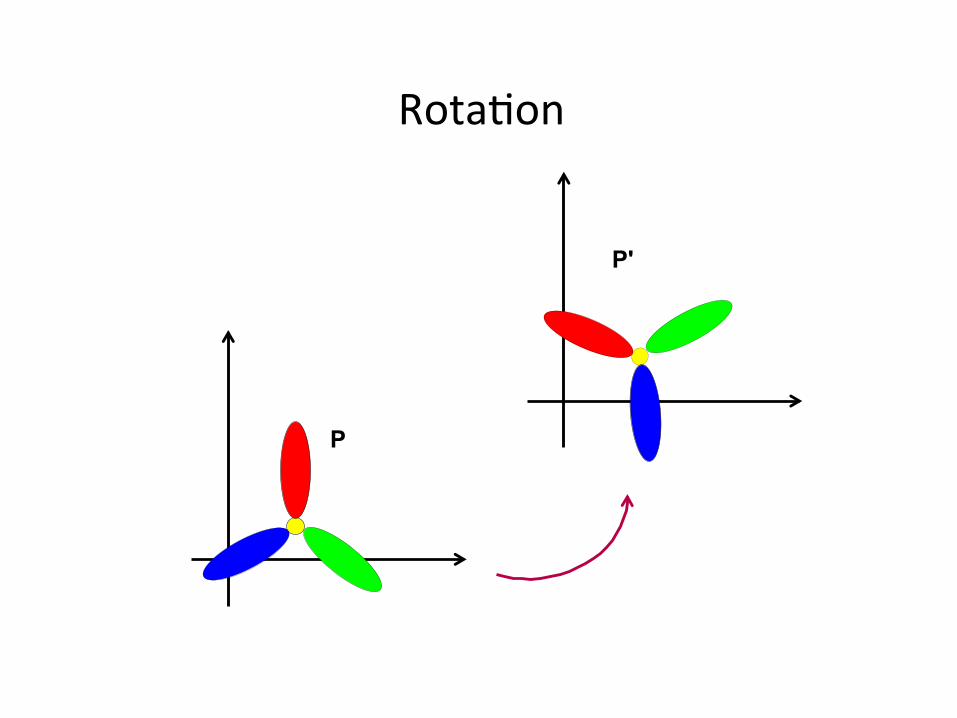
RotaUon
P
P'

RotaUon EquaUons • Counter-‐clockwise rotaUon by an angle 𝜃
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −=⎥
⎦
⎤⎢⎣
⎡
yx
yx
θθ
θθ
cossinsincos
''P
x
y’ P’
θ
x’ y PRP' =
' cos sinx x yθ θ= −
' cos siny y xθ θ= +
How many degrees of freedom? 1 P '→cosθ −sinθ 0sinθ cosθ 00 0 1
#
$
%%%
&
'
(((
xy1
#
$
%%%
&
'
(((
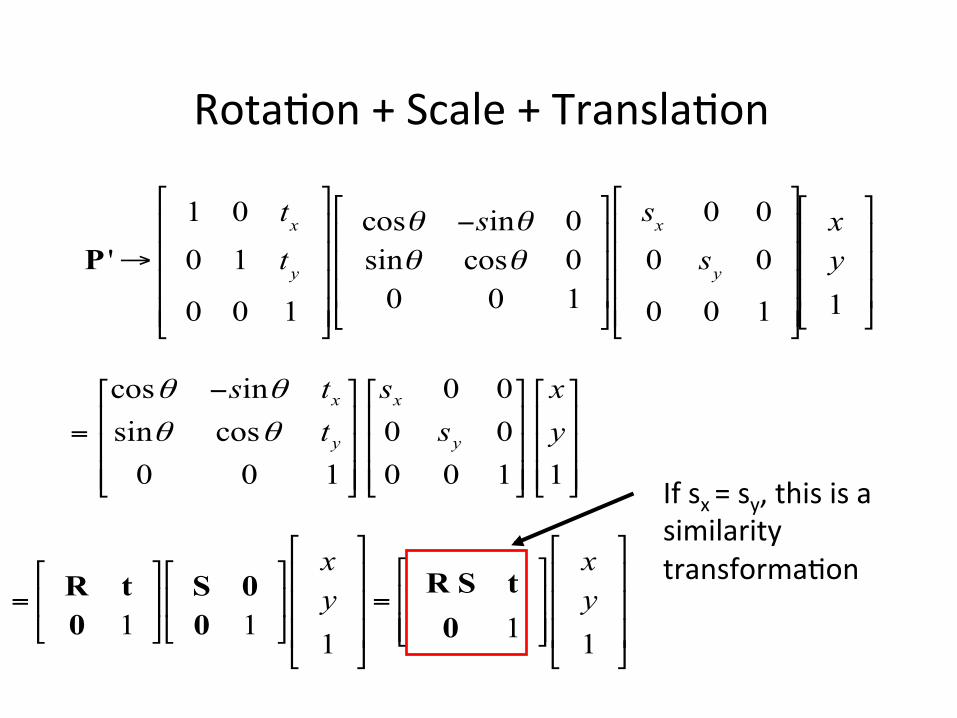
RotaUon + Scale + TranslaUon
P '→
1 0 tx0 1 ty0 0 1
"
#
$$$$
%
&
''''
cosθ −sinθ 0sinθ cosθ 00 0 1
"
#
$$$
%
&
'''
sx 0 0
0 sy 0
0 0 1
"
#
$$$$
%
&
''''
xy1
"
#
$$$
%
&
'''
cos in 0 0sin cos 0 00 0 1 0 0 1 1
x x
y y
s t s xt s y
θ θθ θ
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
= R t0 1
!
"#
$
%& S 00 1
!
"#
$
%&xy1
!
"
###
$
%
&&&= R S t
0 1
!
"##
$
%&&
xy1
!
"
###
$
%
&&&
If sx = sy, this is a similarity transformaUon
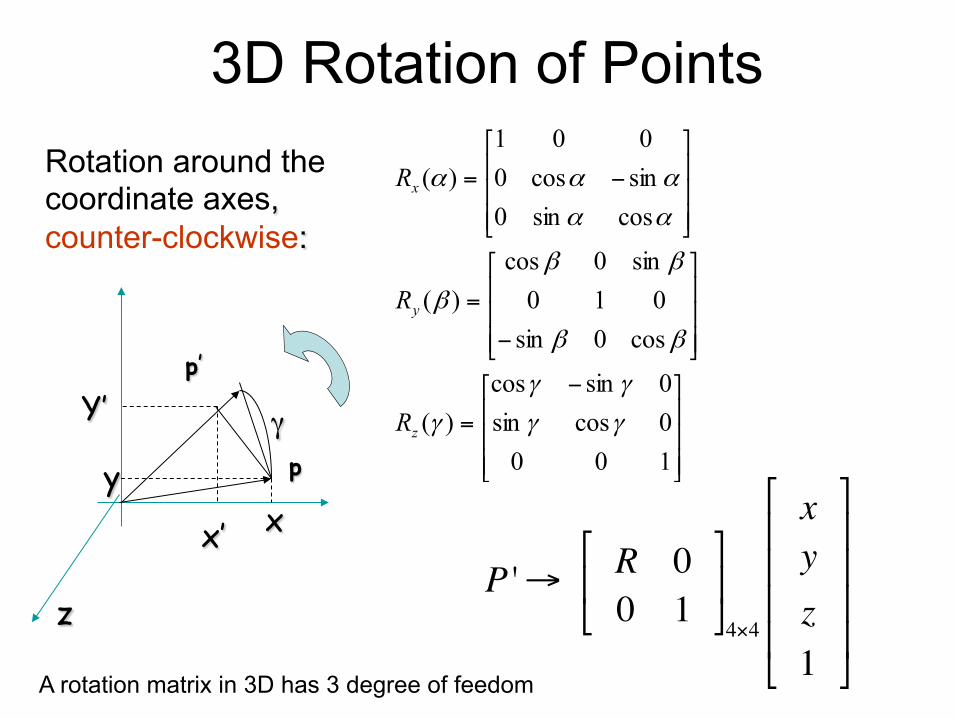
3D Rotation of Points Rotation around the coordinate axes, counter-clockwise:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
1000cossin0sincos
)(
cos0sin010
sin0cos)(
cossin0sincos0001
)(
γγ
γγ
γ
ββ
ββ
β
αα
ααα
z
y
x
R
R
R
p
x
Y’ p’
γ
x’
y
z P '→ R 0
0 1
"
#$
%
&'4×4
xyz1
"
#
$$$$
%
&
''''
A rotation matrix in 3D has 3 degree of feedom
= K R T!"
#$Pw
World reference system
Ow
iw
kw
jw R,T
P = R T0 1
!
"#
$
%&4×4
PwIn 4D homogeneous coordinates:
Internal parameters External parameters
P ' = K I 0!"
#$P =K I 0!
"#$
R T0 1
!
"%
#
$&4×4
Pw
M
P
P’
f
xwywzw1
!
"
#####
$
%
&&&&&
[Eq.11]
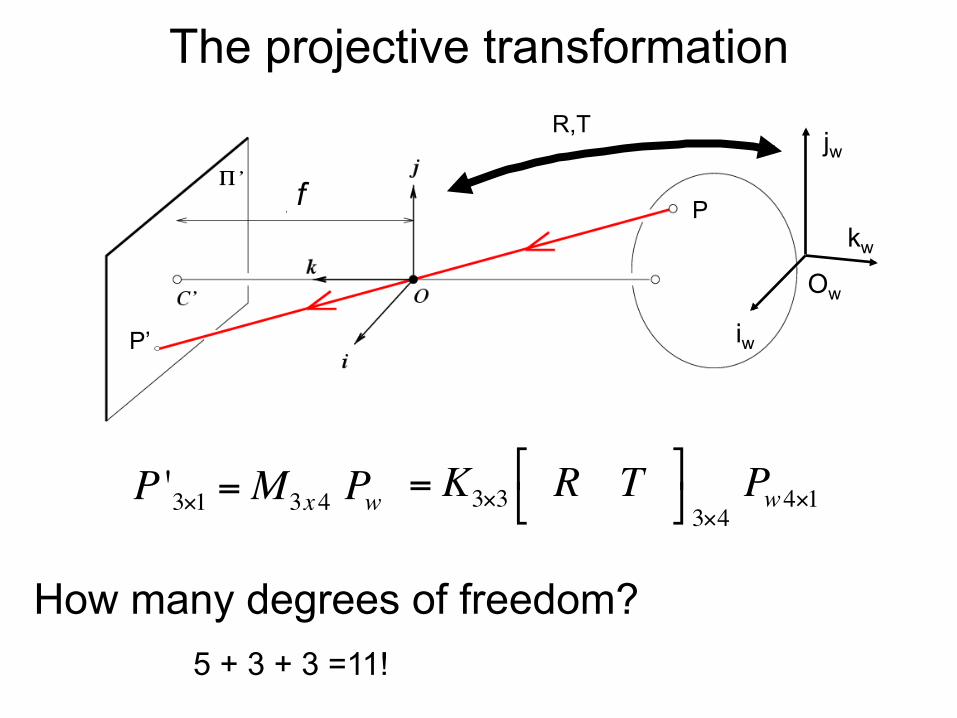
P '3×1 =M3x4 Pw = K3×3 R T"#
$% 3×4
Pw4×1
The projective transformation
Ow
iw
kw
jw R,T
How many degrees of freedom? 5 + 3 + 3 =11!
P
P’
f
The projective transformation
Ow
iw
kw
jw R,T
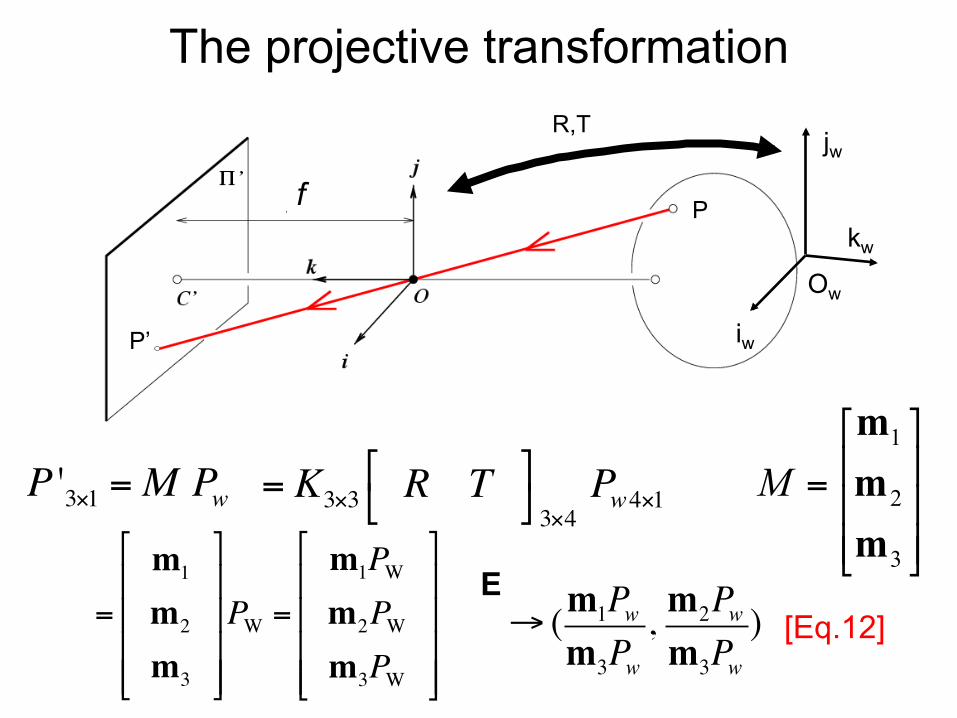
P '3×1 =M Pw = K3×3 R T"#
$% 3×4
Pw4×1⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
3
2
1
mmm
M
=
m1
m2
m3
!
"
####
$
%
&&&&
PW =m1PWm2PWm3PW
!
"
####
$
%
&&&&
→ (m1Pwm3Pw
, m2Pwm3Pw
)E
P
P’
f
[Eq.12]
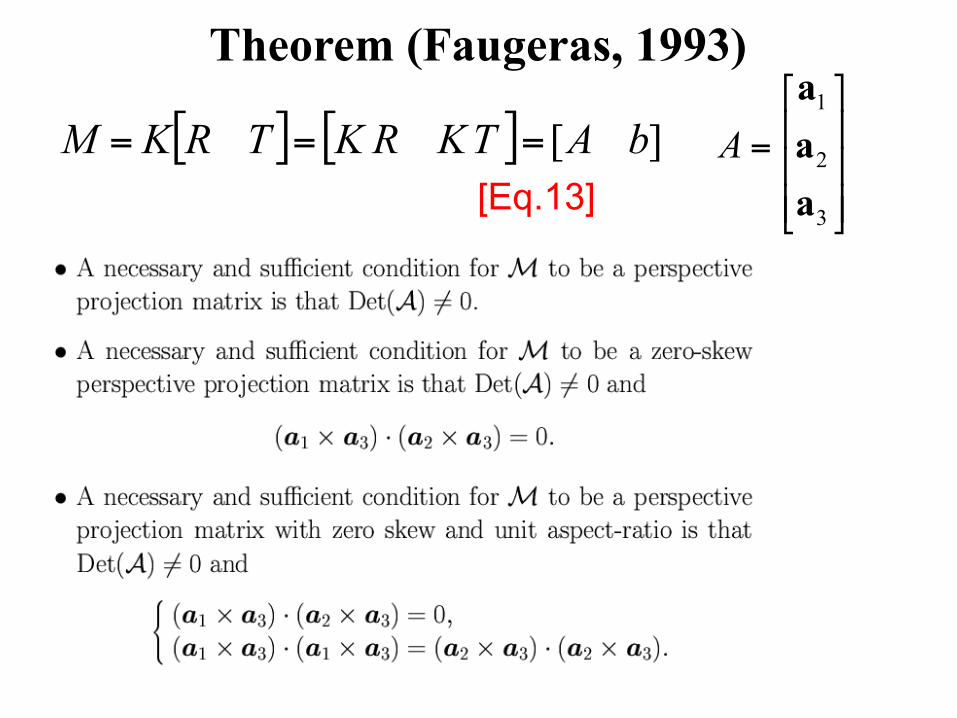
Theorem (Faugeras, 1993)
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
3
2
1
aaa
A[ ] [ ] ][ bATKRKTRKM ===[Eq.13]
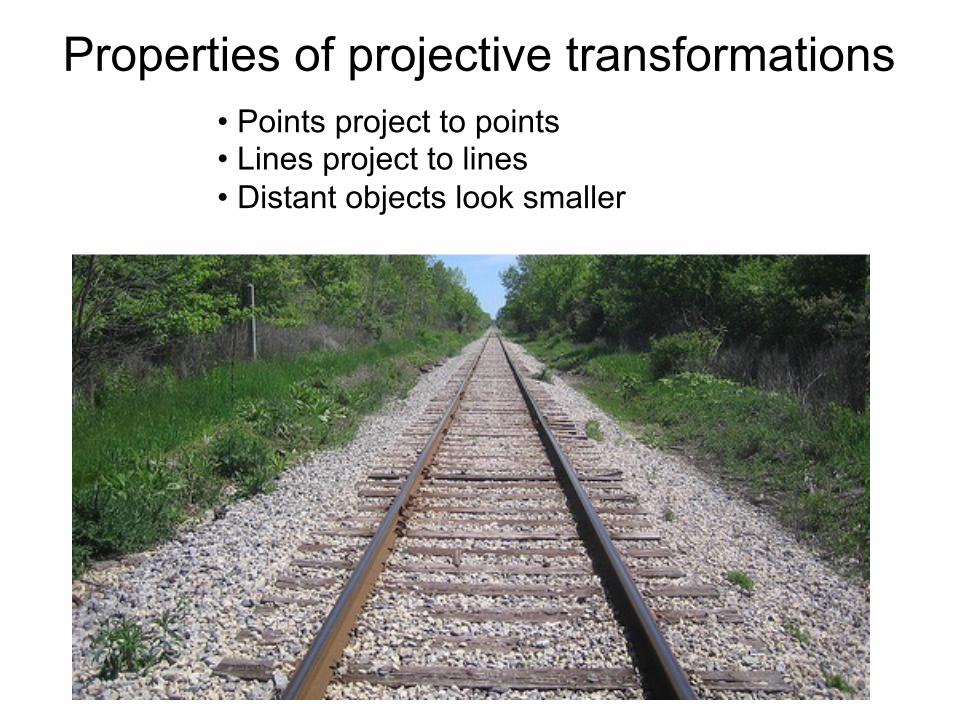
Properties of projective transformations • Points project to points • Lines project to lines • Distant objects look smaller
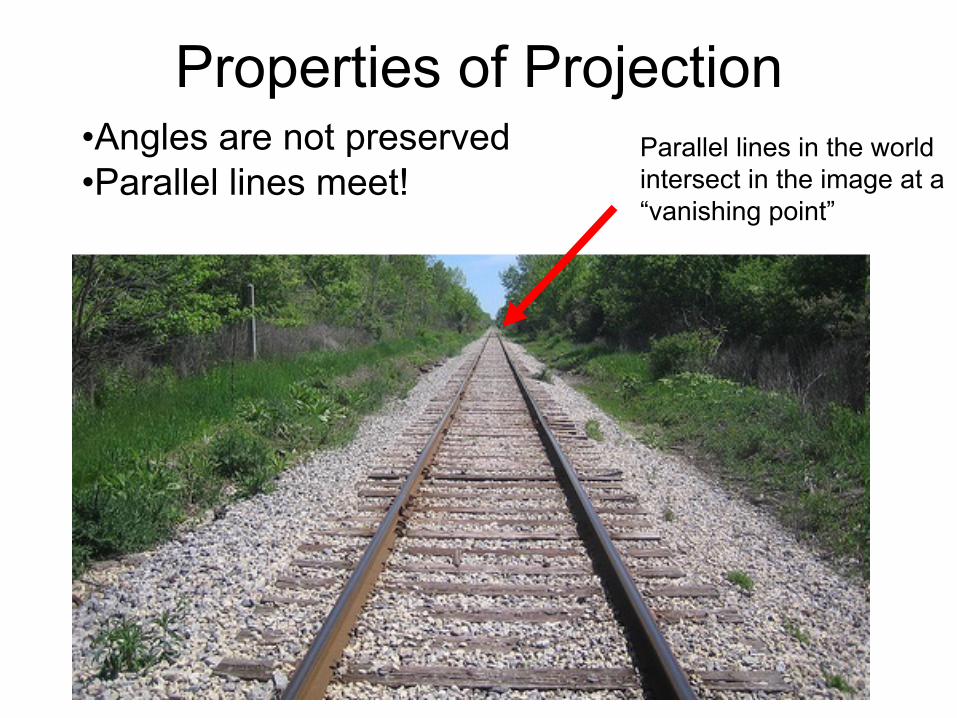
Properties of Projection
• Angles are not preserved • Parallel lines meet!
Parallel lines in the world intersect in the image at a “vanishing point”
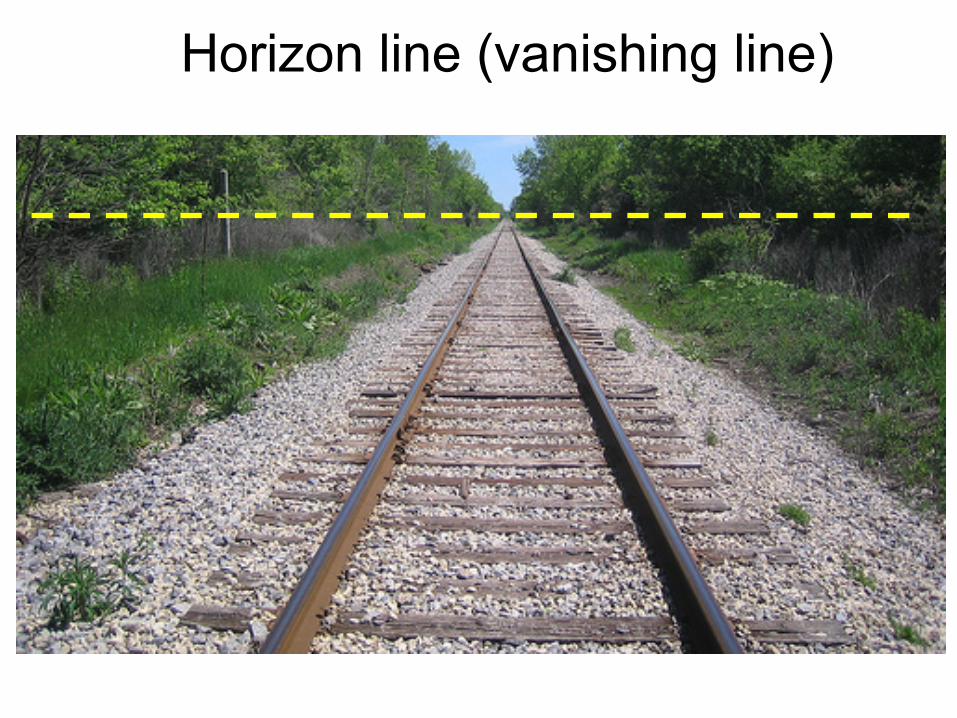
Horizon line (vanishing line)
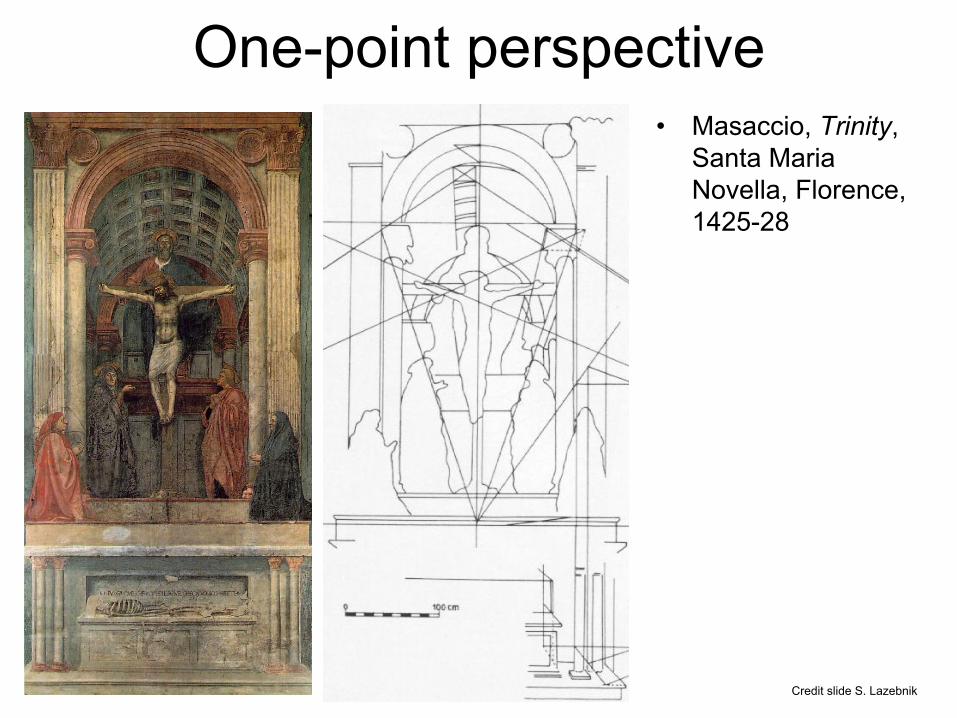
One-point perspective • Masaccio, Trinity,
Santa Maria Novella, Florence, 1425-28
Credit slide S. Lazebnik
Next lecture
• How to calibrate a camera?
Supplemental material
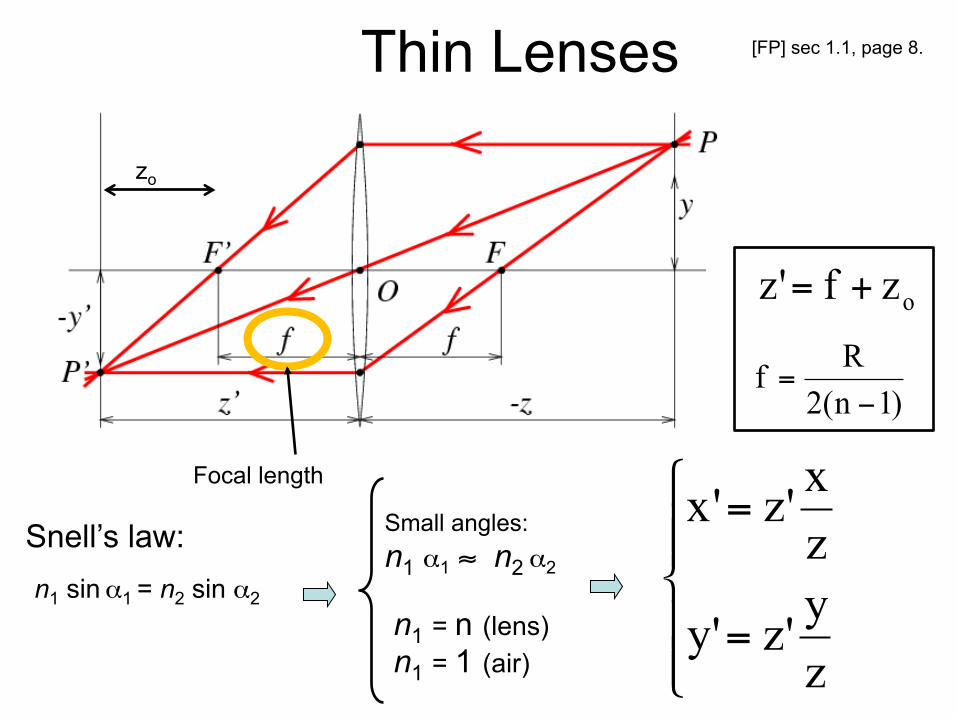
Thin Lenses
Snell’s law:
n1 sin α1 = n2 sin α2
Small angles: n1 α1 ≈ n2 α2
n1 = n (lens) n1 = 1 (air)
zo
zy'z'y
zx'z'x
⎪⎪⎩
⎪⎪⎨
⎧
=
=
ozf'z +=
)1n(2Rf −
=
Focal length
[FP] sec 1.1, page 8.
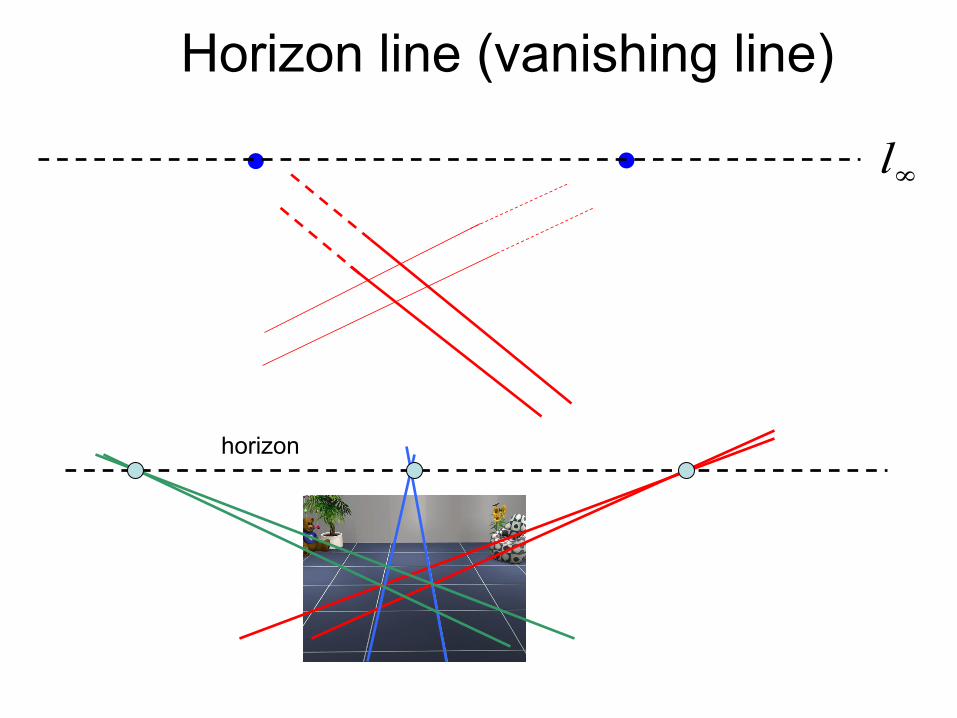
Horizon line (vanishing line)
horizon
∞l










![Lecture 8 Active stereo& - Stanford UniversitySilvio Savarese Lecture 7 - 12-Feb-18 Lecture 8 Active stereo& Volumetric stereo Reading: [Szelisky] Chapter 11 “Multi-view stereo”](https://img.dokumen.tips/doc/110x75/5f0f7f2f7e708231d444745e/lecture-8-active-stereo-stanford-university-silvio-savarese-lecture-7-12-feb-18.jpg)


















