Embed Size (px)
Citation preview

1
MECH 466Microelectromechanical Systems
University of VictoriaDept. of Mechanical Engineering
Lecture 5:Electrostatic Sensors and Actuators
© N. Dechev, University of Victoria
2
Introduction to Electrostatics
Overview of Electrostatic Actuators and Sensors
Parallel Plate Capacitors
Electrostatic Interdigitated Finger Capacitors (Comb-Drives)
Overview
© N. Dechev, University of Victoria

3
Introduction to Electrostatic Transducers
Electrostatic sensors and actuators operate on the principle of electric charge.
Electrostatics work well for micro-scale devices, since the (surface area/volume) ratio is higher for micro-devices.
The electrostatic effect is based on surface area, while mass is based on volume, and hence electrostatic force is good for microsensing and microactuation.
© N. Dechev, University of Victoria
Accelerometer [Analog Devices] DLP Micromirror Matrix [Texas Instruments]
4
Introduction to Electrostatic Transducers
For ‘sensors’, capacitive devices can be used.
- A typical capacitor is comprised of two conductive elements, physically separated from each other, using some kind of dielectric material.
- The capacitance of a capacitor may be varied by:
______________________
______________________
______________________
© N. Dechev, University of Victoria
Ad
Dielectric Material Properties
Overlap Area A, of Electrodes
Distance d, between Electrodes

5
Introduction to Electrostatic Transducers
For ‘actuators’, movable structures carrying accumulations of electric charge can be used.
There are two possible cases for using electric charge to generate force, and hence motion.
Consider two parallel plates.
© N. Dechev, University of Victoria
+ + + ++++
+ + ++++ + ++++++++++++ ++
Positive Charge
- - - - - - ------------ --
Negative Charge
+ + + ++++
+ + ++++ + ++++++++++++ ++
Positive Charge
+ + + + + + ++++++++++++ ++
Positive Charge
Attractive Force Repulsive Force
6
Electrostatic Micromotor
One of the first electrostatic actuators was a micromotor.
Consider the principle of operation:- Central rotor has one charge.- Radial stator poles have opposite charge.- Six stator phases (pair of poles) as shown below, are turned on and off in a sequence to cause the rotor to turn.
© N. Dechev, University of Victoria
(Shown above) Single Phase Driving Sequence: 1,2,3,4,5,6,1,2,3,4,5,6,...(Alternate) Dual Phase Driving Sequence [1,4], [2,5], [3,6], [1,4], [2,5], [3,6],...
1 2
3
4
12
3
4
5
5
6
6
1 2
3
4
12
3
4
5
5
6
6
1 2
3
4
12
3
4
5
5
6
6

7
Electrostatic Micromotor
© N. Dechev, University of Victoria
SEM of an early Electrostatic Motor[Mehregany, MIT]
Movie of Electrostatic Motor, (720 stator poles)[M. Basha, U of Waterloo]
8
Electrostatic Comb-Drive
Electrostatic actuators can also be used to create ‘linear motion’ using a ‘comb-drive’ that makes use of interdigitated fingers.
The principle of operation:- Central comb has one charge.- Two outer combs are sequenced with opposite charge.
© N. Dechev, University of Victoria
Generic Comb-Drive (Sensor or Actuator)[D. Freeman, MIT]
Movie of Comb-Drive Actuator[J. Levitan, MIT]

9
Electrostatic Transducers
Benefits of electrostatic devices:
- simplicity- very low power use for low frequency applications- fast response:
- speed is governed by the charge and discharge time constants, which are small for good conductors.- switch time of 21us for DMDs.
- deflection can be accurately controlled
There are also disadvantages:
- Actuators require drive voltages in the 50 - 150 Volt range.- Sensors require carefully designed circuits to measure capacitance change in presence of noise and interference.
- Static capacitance values are in the picoFarad range, while capacitance changes are in femtoFarad range.
- Large surface area is required for comb-drives to generate forces equivalent to other micro-actuators.
© N. Dechev, University of Victoria
10
Parallel Plate Electrostatic Devices
Example of a parallel plate electrostatic system, is the DMD (Digital Micromirror Device), developed by Texas Instruments.
© N. Dechev, University of Victoria
DMD Operation Schematic,[Texas Instruments]

11
Parallel Plate Electrostatic Devices
© N. Dechev, University of Victoria
DMD Operation [Texas Instruments]
DLPTM Chip
Micro-MirrorElement (Pixel)
Micro-MirrorRemoved
Micro-Mirror
Actuator
Micro-Mirror
Compliant Hinge
12
Parallel Plate Capacitors
Consider an “ideal” parallel plate capacitor:
© N. Dechev, University of Victoria
AWhere: A - Overlap area of two plates E - Electric Field d - distance between the two plates
E d
A dielectric material will occupy the space between the two plates:
The ‘Relative’ electrical permitivity is defined as:
The permitivity of the material is:
Where , is the permitivity of free space (vacuum)

13
Parallel Plate Capacitors
The capacitance between two plates is defined as:
© N. Dechev, University of Victoria
Stored Charge Electrostatic Potential=
A
E d
The electric energy stored in the capacitor is:
14
Parallel Plate Capacitors
To obtain an expression for capacitance for the parallel pales, we can use Gauss’s Law, where the electric field:
This can be substituted into the capacitance equation to obtain:
© N. Dechev, University of Victoria

15
By measuring C accurately, we can sense changes in A (area), Permittivity, or d (distance between plates).
For example, Permittivity of a material can be influenced by:- Humidity- Chemical reactions - Temperature
Also, changes in the overlap of the two plates, or changes in the distance between the plates, can be made by:
- Static pressure- Acceleration- Other physical phenomena
© N. Dechev, University of Victoria
Parallel Plate Capacitors
16
The force due to electrostatic attraction or repulsion between the plates is important to determine, and is defined by:
© N. Dechev, University of Victoria
Parallel Plate Capacitors
If the plates move along the axis normal to their surface, the variable of displacement is d. Therefore:
Solving:

17
Example of force between two plates. (Example 4.1)
© N. Dechev, University of Victoria
Parallel Plate Capacitors
See Class Notes
Diagram of Comb-Drive:
18
Interdigitated Finger Capacitors
© N. Dechev, University of Victoria
Lo
tLc
wt xoOne Side of Comb
Other Side of Comb

Modeling of Comb-Drives
19
Interdigitated Finger Capacitors
© N. Dechev, University of Victoria
One Comb is Anchored
Km
Mechanical ConnectionBetween Combs
CCf
Where: C - Normal Capacitance Between Beams Cf - Fringe Capacitance (Highly Non-linear)
A mechanical spring constant, Km, represents the stiffness of the compliant mechanism between the two combs
The two types of capacitance, C, and Cf, both have substantial contributions to the overall capacitance of the device.
20
The total capacitance of the system is given by:
For the previous diagram:
There are two main types of Comb-Drives:
- Transverse
- Longitudinal
© N. Dechev, University of Victoria
Interdigitated Finger Capacitors

21
The design of the flexure mechanism will determine the system stiffness and hence axis of motion
© N. Dechev, University of Victoria
Transverse Comb-Drive
High StiffnessKm (y-axis)
Km (x-axis)Low Stiffness
AnchorPoints
FlexibleBeams
(a)
DeflectedBeams
(b)
δx
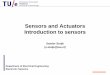
22
When the upper comb is deflected to the right, the capacitance will change between the fingers as follows:
© N. Dechev, University of Victoria
Transverse Comb-Drive
x
y
Lo
xxo
relative motion
Csr
Csl
Capacitance ofleft side:
Capacitance ofright side:

23
The total capacitance is defined as:
Note: under equilibrium conditions, the net change in capacitance will be zero.
© N. Dechev, University of Victoria
Transverse Comb-Drive
However, during motion, the rate of capacitance change can be measured, termed the displacement sensitivity, Sx:
If the comb-drive is used as an actuator, the force can be represented as:
24
The capacity change associated with a single finger is:
Note: under equilibrium conditions, the net change in capacitance will be a finite amount.
© N. Dechev, University of Victoria
Longitudinal Comb-Drive
x
y
Lo
+y
yo

25
The displacement sensitivity in the longitudinal direction, Sy, is defined as:
If the longitudinal comb-drive is used as an actuator, the force can be represented as:
Note: The solution to these equations is not trivial.
© N. Dechev, University of Victoria
Longitudinal Comb-Drive
26
To compute values such as force, displacement sensitivity, and other parameters, numerical methods are required.
The contribution from ‘fringe capacitance’ is substantial, and cannot be ignored.
However, ‘fringe capacitance’ is highly non-linear and changes with different initial conditions and boundary conditions.
© N. Dechev, University of Victoria
Computation of Comb-Drive Values
Electric Field Plot[C. Liu]

27
Electromagnetic FEA (finite element analysis) is often used to compute the electric fields and intensities, and subsequently to determine capacitance, force and other parameters.
© N. Dechev, University of Victoria
Computation of Comb-Drive Values
Electric Field Isolines[ANSYS]
Read Case 4.9 in Textbook. Example of how comb-drives are used for linear actuation of a Gear Rack, via a Pinion Gear.
28© N. Dechev, University of Victoria
Linear Actuators based on Comb-Drives
Rotational Comb-Drives
Linear Actuator[Sandia National Laboratories]
Rotational Comb-Drive[ALGOR FEMPRO]