Embed Size (px)
Citation preview

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 0 –
Lecture 2: Introduction to GLM’s
Claudia Czado
TU Munchen

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 1 –
Overview
• Introduction to GLM’s
• Goodness of fit in GLM’s
• Testing in GLM’s
• Estimation in GLM’s

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 2 –
Introduction to GLM’s
In generalized linear models (GLM) we also have independent response variableswith covariates.
While in linear models a good scale of the response variables has to combineadditivity of the covariate effects with the normality of the errors, includingvariance homogeneity, GLM’s don’t need to satisfy these scale requirements.
GLM’s allow also to include nonnormal errors such as binomial, Poisson andGamma errors.
Regression parameters are estimated using maximum likelihood.
The standard reference on GLM’s is McCullagh and Nelder (1989).

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 3 –
Components of a GLM:Response Yi and independent variables Xi = (xi1, · · ·xip) for i = 1, · · · , n.
1. Random Component:Yi, 1 ≤ i ≤ n independent with density from the exponential family, i.e.
f(y; θ, φ) = exp{θy − b(θ)a(φ)
+ c(y, φ)}.
Here φ is a dispersion parameter and functions b(), a() and c(, ) are known.
2. Systematic Component:ηi(β) = xt
iβ = β0 + β1xi1 + · · ·+ βpxip linear predictor,β = (β0, · · · , βp) regression parameters
3. Parametric Link Component:The link function g(µi) = ηi = xt
iβ combines linear predictor with mean µi
of yi. Canonical link function if θ = η.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 4 –
LM as GLM
Yi = xtiβ + εi = µi + εi, εi ∼ N(0, σ2) iid, i = 1, .., n,
The density of Yi has exponential family form since
f(yi, µi, σ) =1√2πσ
exp{− 1
2σ2(yi − µi)2
}
= exp
yiµi − µ2i2
σ2− 1
2
[ln(2πσ2) +
y2i
σ2
] .
This implies for θi = µi and φ = σ2
b(θi) =µ2
i
2=
θ2i
2, a(φ) = σ2, c(yi, φ) = −1
2
[ln(2πφ) +
y2i
φ
]
Further we have the identity as link function, i.e. g(µi) = µi.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 5 –
Expectation and variance in GLM’s
When integration and differentiation can be exchanged, mean and variance ina GLM can be represented as
µi = E(Yi) = b′(θi)
V ar(Yi) = a(φ) · b′′(θi).
V (θ) := b′′(θ) is called the variance function of the GLM.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 6 –
GLM’s implemented in Splus
Distribution Family Link Variance
Normal/Gaussian gaussian µ 1
Binomial binomial ln( µ1−µ) µ(1−µ)
n
Poisson poisson ln(µ) µ
Gamma gamma 1µ µ2
Inverse Normal / inverse.gaussian 1µ2 µ3
GaussianQuasi quasi g(µ) V (µ)
For the binomial family the distribution of Yini
is used. ”Quasi” allows for userdefined GLM’s.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 7 –
Link functions:
ηi = xtiβ ηi = g(µi) E(Yi) = µi g − monotone ↑
Normal: µi ∈ R, ηi ∈ R.Often g(µ) = µ or for µ > 0
gα(µ) ={
µα−1α α 6= 0
log(µ) α = 0gα(µ) → log(µ), α → 0
Box-Cox - transformation
Poisson: µ > 0, g : R+ → R monotone ↑
g(µ) = log(µ)
c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 8 –
Link functions:
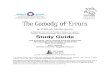
Binomial: µ ∈ [0, 1], need g : [0, 1] → R monotone ↑All cdf’s F : R→ [0, 1] monotone ↑ ⇒ g(µ) := F−1(µ)
a) F (z) = ez
1+ez Logit link (symmetric, heavy-tailed)
⇒ g(µ) := F−1(µ) = log(
µ1−µ
)Logistic regression
b) F (z) = Φ(z), Φ(z) = cdf of N(0, 1) Probit Link (symmetric)⇒ g(µ) = Φ−1(µ) Probit regression
c) F (z) = 1− exp{−exp{z}} complementary Log-log distribution⇒ g(µ) = ln(ln(1− µ)) (nonsymmetric)

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 9 –
Canonical link functions
If θi = ηi ∀i holds, we call the corresponding link function canonical.
Examples:
Linear model: θi = µi = ηi ⇒ identity link canonical.
Binomial model: θi = log(
µi1−µi
)= ηi ⇒ logistic link canonical
In GLM with canonical link (n∑
i=1
xi1yi, . . . ,n∑
i=1
xipyi) is sufficient for
(β1, . . . , βp)t.
c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 10 –
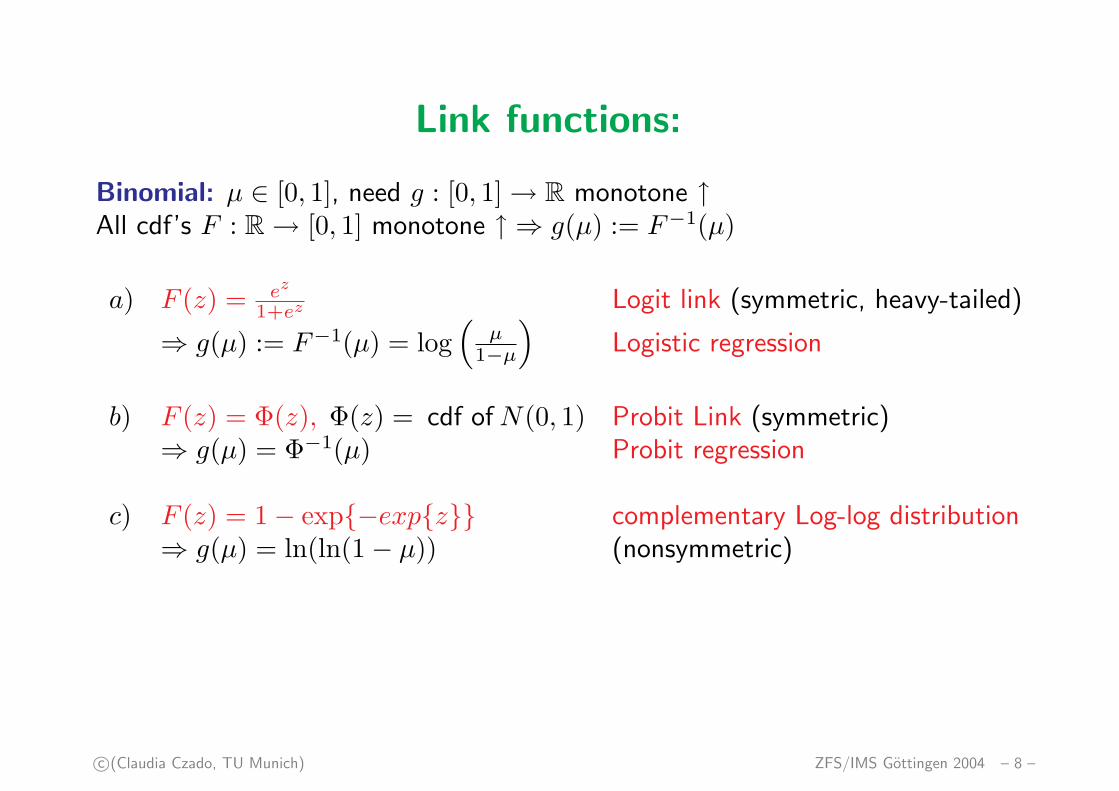
Goodness of fit in GLM: Deviance
Want to estimate Yi by µi.For n data points we can estimate n parameters.
Null model:
µi := Y ∀i, Y :=1n
n∑
i=1
Yi
one parameter → too simple.
Saturated model:µi := Yi ∀i
no error, n parameters used, no explanation of data possible.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 11 –
Loglikelihood in GLM withηi = g(µi), θi = h(µi) (i = 1, . . . , n)
l(β, φ,y) =n∑
i=1
[yiθi−b(θi)
a(φ) − c(yi, φ)]
=n∑
i=1
[yih(µi)−b(h(µi))
a(φ) − c(yi, φ)]
= l(µ, φ,y) “mean parametrization”
l(µ, φ,y) := log likelihood maximized over µ (φ known) µi := g−1(xitβ)
l(y, φ,y) := log likelihood attainable in saturated model i.e. µi = Yi ∀i
⇒ −2[l(µ, φ,y)− l(y, φ,y)]
= 2n∑
i=1
yi(θi−θi)−b(θi)+b(θi)a(φ) , where θi := h(µi), θi := h(Yi)
If a(φ) = φω ⇒
−2[l(µ, φ,y)− l(y, φ,y)] = 2ωn∑
i=1
yi(θi−θi)−b(θi)+b(θi)φ =: D(y,µ)
φ deviance

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 12 –
Ex: Deviance in Linear and Binomial ModelsLinear model:
l(β, φ,y) = −n∑
i=1
12σ2(yi − µi)2 − n
2 ln(2πσ2), µi = xtiβ, φ = σ2
⇒ −2[l(µ, φ,y)− l(y, φ,y)] = 1σ2
n∑i=1
(Yi − µi)2
⇒ D(y, µ) :=n∑
i=1
(Yi − µi)2
Binomial model:Yi ∼ binomial(ni, pi) independent µi := nipi pi = MLE of pi
D(y, µ) = 2n∑
i=1
{yi ln
(yi
µi
)+ (ni − yi) ln
(ni − yi
ni − µi
)}
In binomial regression models is not {Yi, i = 1, . . . , n} a GLM, but {Yini
, i =1, . . . , n} is a GLM.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 13 –
Generalized Pearson Statistic
χ2 :=n∑
i=1
(Yi−µi)2
V (µi)
V (µi) = estimated variance function
= b′′(θi)|θi=h(µi)
Examples:Normal: Yi ∼ N(µi, σ
2) ind.
⇒ θi = µi b(µi) = µ2i2 ⇒ b′′(µi) = 1
⇒ χ2 =n∑
i=1
(Yi − µi)2 = D(y, µ).

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 14 –
Logistic Regression: Yi ∼ bin(ni, pi) ind.
pi = eθi
1+eθi⇒ µi = nipi = ni
eθi
1+eθi
b(θi) = ni ln(1 + eθi) ⇒ b′′(θi) = nieθi
(1+eθi)2
⇒ b′′(p) = nipi(1− pi) = µi(1− µin )
⇒ V (µi) = µi(1− µin ) = nipi(1− pi)
⇒ χ2 =n∑
i=1
(yi−nipi)2
nipi(1−pi).

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 15 –
Asymptotic distribution of Deviance and Pearsonstatistic
1) Normal: Y = Xβ + ε X ∈ Rn×p ε ∼ Nn(0, Inσ2)
⇒ D(y, µ) = χ2 =n∑
i=1
(Yi − µi)2 ∼ σ2χ2n−p
2) For all other GLM’s we have
D(y, µ) L→ φχ2n−p, n →∞ p = # of unknown parameters
χ2 L→ φχ2n−p, n →∞
Proof: deviance is equivalent to a likelihood ratio statistic and bχ2 to the Waldstatistic for which general asymptotic results are available (see e.g: Rao (1973))
3) For finite n one has no theoretical results whether D or χ2 is performingbetter.
c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 16 –
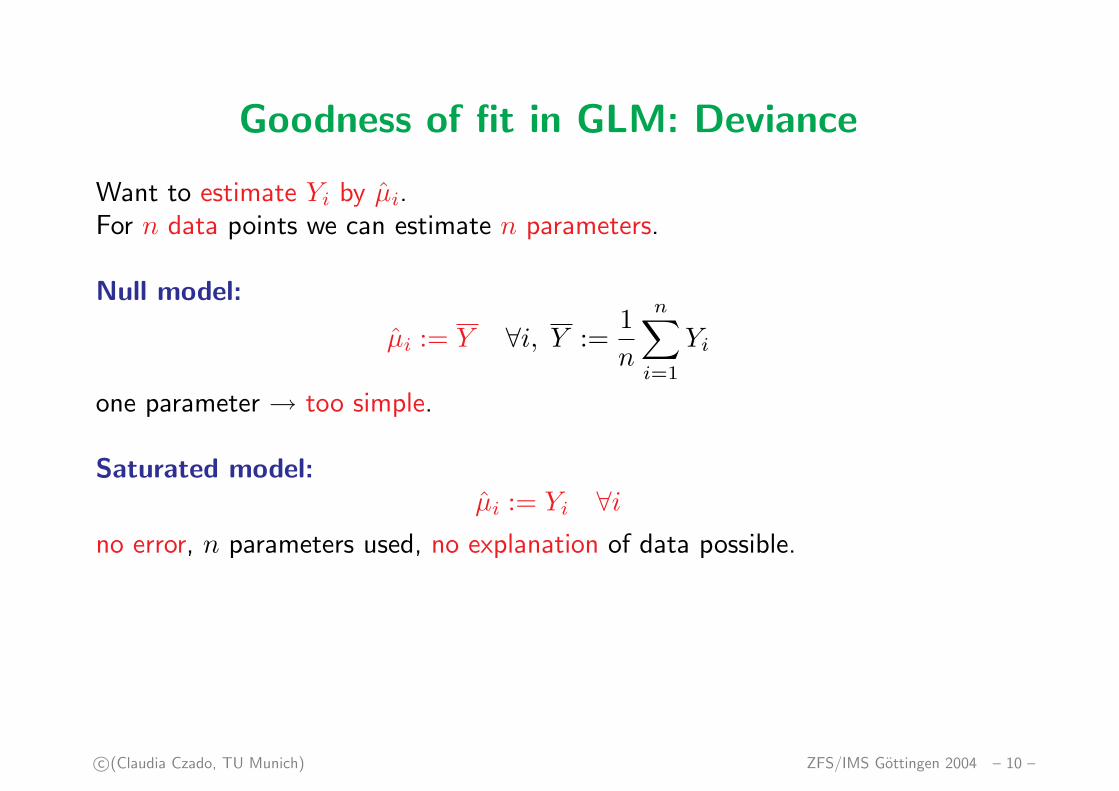
Nested linear models
Model SSE
M1 : Y = 1nβ0 + ε (null model) SSE0
M2 : Y = X1β1 + ε SSE(X1)
M3 : Y = X1β1 + X2β2 + ε (full model) SSE(X1, X2)
X ∈ Rn×p X1 ∈ Rn×p1 X2 ∈ Rn×p2 p1 + p2 = p
Recall: SSE0 =n∑
i=1
(Yi − Y )2
SSE(X1) = ||Y −X1β2
1||2 β2
1 = MLE in M2
SSE(X1, X2) = ||Y −X1β3
1 −X2β3
2||2 β3
1, β3
2 = MLE in M3

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 17 –
Analysis of devianceLet M1 ⊂ M2 ⊂ . . . ⊂ Mr a sequence of nested models with M1 = null modeland Mr = saturated model. That means that all covariates of Mi are containedin Ms for s ≥ i + 1 ∀i.
Model DevianceM1 (null model) Dev1
> Dev1 −Dev2
M2 Dev2... ... ...Mr−1 Devr−1
> Devr−1 −Devr
Mr (saturated model) Devr
-Difference Devi − Devi+1 is considered as the variation explained by Mi+1
minus the variation explained by M1, . . . , Mi. The variations explained byMi+2, . . . , Mr are disregarded.-Analysis of deviance depends on the order of covariates added to the models-Since there is no exact distribution theory, it is used as a screening method toidentify important covariates

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 18 –
Statistical hypothesis testsResidual deviance test
H0 : ηi = g(µi) ∀i H1 : not H0
Reject H0 ⇔ Dev > χ2n−q,1−α is an asymptotic α−level test
Problem: Often one is interested to use this as a goodness-of-fit test, i.e.one wants to accept H0. However the power function is unknown.
Partial deviance test
η = X1β1 + X2β2 Model F with deviance DF β1 ∈ Rp1, β2 ∈ Rp2
η = X1β1 Model R with deviance DR p1 + p2 = p
H0 : β2 = 0 H1 : β2 6= 0
Reject H0 ⇔ DR −DF > χ2p−p2=p1,1−α

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 19 –
Residuals
Pearson residuals: rPi := yi−µi√
V (µi)i = 1, . . . , n
Deviance residuals: rDi := sign(yi − µi)
√di
Dev =n∑
i=1
di di = deviance contribution of ith obs.
sign(x) ={
1 x > 0−1 x ≤ 0
- χ2 =n∑
i=1
(rPi )2, Dev =
n∑i=1
(rDi )2
- For nonnormal GLM Pearson residuals are skewed. Better to use Anscomberesiduals.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 20 –
Maximum Likelihood Estimation (MLE) in GLM’s
Loglikelihood for obs. i:
li(yi, µi, φ) =[yiθi − b(θi)]
a(φ)+ c(yi, φ)
where g(µi) = ηi µi = E(Yi) = h(θi) ηi = xtiβ β ∈ Rp
Since
∂li∂βj
= ∂li∂µi
dµidηi
∂ηi∂βj
we need
∂ηi∂βj
= xij xi = (xi1, . . . , xip)t
∂li∂µi
= ∂li∂θi
/∂µi∂θi
µi=b′(θi)= yi−b′(θi)a(φ) /b′′(θi) = yi−µi
Vi, since Vi = V ar(Yi) = a(φ) · b′′(θi)
⇒ ∂li∂βj
= ∂li∂µi
dµidηi
∂ηi∂βj
= yi−µiVi
dµidηi
xij

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 21 –
For n independent observations:
l(y, β) :=n∑
i=1
li(yi, µi, φ)
⇒ ∂l∂βj
=n∑
i=1
∂li(yi,µi,φ)∂βj
=n∑
i=1
yi−µiVi
dµidηi
xij Vi = V ar(Yi)
µi = E(Yi)
Let Wi := 1
Vi
(dηidµi
)2 =(
dµidηi
)2
/Vi since dηidµi
= 1/dµidηi
⇒ sj(β) := ∂l(y,β)∂βj
=n∑
i=1
Wi(yi − µi)dηidµi
xij = 0 j = 1, . . . , p
score equations

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 22 –
Newton Raphson Method
Want to solve f(x) =
f1(x1, . . . , xn)...
fn(x1, . . . , xn)
= 0. Let x = ξ the solution and x0
a value close to ξ. Then we have with first order Taylor expansion around x0:
0 = f(ξ) ≈ f(x0) + Df(x0)︸ ︷︷ ︸∈Rn×n
(ξ − x0)︸ ︷︷ ︸∈Rn
where
Df(x0) :=
∂f1∂x1
· · · ∂f1∂xn... . . . ...
∂fn∂x1
· · · ∂fn∂xn
x=x0⇒ ξ = x0 − [Df(x0)]−1f(x0)
Newton Raphson method is an iterative algorithm with x0 a starting value and
xi+1 = xi − [Df(xi)]−1f(xi)
There are general convergence results available.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 23 –
To solve s(β) = (s1(β), . . . , sp(β))t = 0 we need
H(β) :=
∂s1∂β1
· · · ∂s1∂βp
... . . . ...∂sp
∂β1· · · ∂sp
∂βp
=
∂2l∂β1∂β1
· · · ∂2l∂β1∂βp
... . . . ...∂2l
∂βp∂β1· · · ∂2l
∂βp∂βp
= Hessian matrix = − observed information matrix
∂2l∂βs∂βr
= ∂∂βs
[n∑
i=1
yi−µiVi
dµidηi
xir
]
=n∑
i=1
(yi − µi) ∂∂βs
[V −1
idµidηi
xir
]+
n∑i=1
V −1i
dµidηi
xir∂
∂βs(yi − µi)
Further ∂∂βs
(yi − µi) = −dµidηi
∂ηi∂βs
= −dµidηi
xis. Since ∂2l∂βs∂βr
depends on Y
in general we use E( ∂2l∂βs∂βr
) instead. Note that for canonical link we have∂2l
∂βs∂βr= E( ∂2l
∂βs∂βr).

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 24 –
Expected information matrix
A(β) :=[−E( ∂2l
∂βs∂βr)]
s,r=1,...,pis called the expected information matrix
One can show that
−E ∂2l∂βs∂βr
= E ∂l∂βs
∂l∂βr
Es(β)=0⇒ A(β) = cov s(β)
The both expressions are used as definition for the expected information matrixin the literature.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 25 –
Fisher scoring method
E( ∂2l∂βs∂βr
) = E (· · · )︸ ︷︷ ︸=0
+E
−
n∑i=1
V −1i
(dµi
dηi
)2
︸ ︷︷ ︸Wi
xis xir
= −n∑
i=1
Wi xis xir
⇒ A(β) :=[−E( ∂2l
∂βs∂βr)]
s,r=1,...,p= +XtWX ∈ Rp×p,
where W = diag(W1, . . . , Wn) ∈ Rn×n and X ∈ Rn×p.
Fisher scoring method: let βr the current estimation to the solution ofs(β) = 0, the new estimation value is given by
βr+1 = βr + A−1(βr)s(βr)

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 26 –
Fisher scoring as iterative weighted least squares
Since A(βr)βr+1
︸ ︷︷ ︸∈Rp
= A(βr)βr + s(βr)
⇒ (A(βr)βr+1)j =p∑
s=1Ajs(βr)βr
s + sj(βr) g(µri ) = ηr
i = xtiβ
r
=p∑
s=1
n∑i=1
W ri xijxisβ
rs +
n∑i=1
W ri (yi − µr
i )dηr
idµr
ixij
=n∑
i=1
W ri xij [
p∑s=1
xisbrs
︸ ︷︷ ︸ηr
i
+(yi − µri )
dηri
dµri]
Define the adjusted dependent variable
Zri := ηr
i + (yi − µri )
dηri
dµri⇒
(A(βr)βr+1)j =n∑
i=1
W ri xijZ
ri

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 27 –
On the other side we have
(A(βr)βr+1)j =p∑
s=1Ajs(βr)βr+1
s =p∑
s=1
n∑i=1
W ri xijxisβ
r+1s
=n∑
i=1
W ri xij
p∑s=1
xisbr+1s
︸ ︷︷ ︸ηr+1
i
Therefore we have
n∑
i=1
W ri xijZ
ri =
n∑
i=1
W ri xijη
r+1i ∀j = 1, . . . , p
or in matrix form: XtW rZr = XtW rXβr+1.
These equations correspond to the normal equations of a weighted leastsquares estimation with response Zr
i , covariates x1, . . . ,xp and weights (W ri )−1.
Therefore we speak of the IWLS (iterated weighted least square).

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 28 –
IWLS algorithm
Step 1: Let βr the current estimate of β, determine
- ηri := xi
tβr i = 1, . . . , n (current linear predictors)- µr
i := g−1(ηri ) (current fitted means)
- θri := h−1(µr
i )- V r
i := a(φ) · b′′(θi)|θi=θri
- Zri := ηr
i + (yi − µri )
(dηidµi|ηi=ηr
i
)(adjusted dependent variable)
- W ri :=
[V r
i
(dηidµi|ηi=ηr
i
)2]−1
Step 2: Regress Zri on xi1, . . . , xip with weights (W r
i )−1 to obtain new estimateβr+1 and continue with step 1 until ||βr − βr+1|| sufficiently small.

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 29 –
Remarks1) Zr
i is the linearized form of the link function at yi, since
g(yi) ≈ g(µri )︸ ︷︷ ︸
ηri
+(yi − µri ) g′(µr
i )︸ ︷︷ ︸dηr
idµr
i⇒ Zri ≈ g(yi) up to the first order
2) V ar(Zri ) ≈ V ar(Yi − µr
i )︸ ︷︷ ︸Vi
·(
dηri
dµri
)2
= (W ri )−1
if ηri , µ
ri are considered fixed and known.
3) Often one can use the data as starting values, i.e.
µ0i = yi ⇒ η0
i = g(µ0i )
If Yi = 0 in the binomial case one needs to change the start values to avoidlog(0).

c©(Claudia Czado, TU Munich) ZFS/IMS Gottingen 2004 – 30 –
References
McCullagh, P. and J. Nelder (1989). Generalized linear models. Chapman &Hall.
Rao, C. (1973). Linear Statistical Inference and Its Applications, 2nd Ed.New York: Wiley.