Embed Size (px)
Citation preview

Learning the Hidden Human Knowledge of UAV Pilots when navigatingin a cluttered environment for improving Path Planning
Ignacio Alzugaray and Alberto Sanfeliu1
Abstract— We propose in this work a new model of how thehidden human knowledge (HHK) of UAV pilots can be incor-porated in the UAVs path planning generation. We intuitivelyknow that human’s pilots barely manage or even attempt todrive the UAV through a path that is optimal attending to somecriteria as an optimal planner would suggest. Although humanpilots might get close but not reach the optimal path proposedby some planner that optimizes over time or distance, thefinal effect of this differentiation could be not only surprisinglybetter, but also desirable. In the best scenario for optimality,the path that human pilots generate would deviate from theoptimal path as much as the hidden knowledge that its perceivesis injected into the path. The aim of our work is to usereal human pilot paths to learn the hidden knowledge usingrepulsion fields and to incorporate this knowledge afterwardsin the environment obstacles as cause of the deviation fromoptimality. We present a strategy of learning this knowledgebased on attractor and repulsors, the learning method and amodified RRT* that can use this knowledge for path planning.Finally we do real-life tests and we compare the resulting pathswith and without this knowledge.
I. INTRODUCTIONRescue missions in natural disasters or accidents in in-
dustrial plants usually involve inspection tasks to evaluatethe level of damage of the injured items. While these tasksmight be hazardous for humans or their nature make themunfeasible in relatively quick time, an UAV might be sent toevaluate the losses. Although its flight may be supervised bya security pilot, it might be required to fly autonomously, inwhich case path planning algorithms become necessary.
Most of the path planners used nowadays for guidingUAVs [1] are based on RRT [2] due to their great perfor-mance in terms of computational time, low parametrizationand efficiency [3][4]. Such planners are usually based ona minimum-distance criteria so that the solution convergesto an optimal or approximately optimal minimum distancepath. Although the generated paths might effectively avoidobstacles in the environment, attempting to use such plannersfor the aforementioned tasks could be risky: if the generatedpath is such that the UAV passes very close, for example, tohigh-temperature gas line leaks, fire or any other source ofdanger, the integrity of the robot may result damaged.
Although the humans might be aware of these risks, theaforementioned path planners do not typically include thisknowledge during path generation. Instead, they generate
*This work was supported by the Spanish Ministry of Science and Inno-vation, project Rob-Int-Coop DPI2013-42458-P and AEROARMS Europeanproject H2020-ICT-2014-1-644271
1The authors are with Institut de Robotica i Informatica In-dustrial (CSIC-UPC). Llorens Artigas 4-6, 08028 Barcelona, Spain.{ialzugaray,sanfeliu}@iri.upc.edu
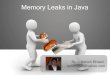
Fig. 1. In a) the blue line represents the human pilot path when guidingan UAV. The green line represents the generated RRT path without takinginto account the HHK. One of the environment object (the one with thebig red ‘R’) entails risk. The pilot is aware of it and thus deviates largelythe path in order to separate the UAV from the risk. In b) the magenta linerepresents the generated RRT path including the HHK learned by meansof the blue path in a). Additionally, the learned risk level is extrapolatedto another object in the scene, which the human knows that has the samelevel of hazardous than the first one. In consequence, the UAV automaticallyavoids passing close to that object as well.
a path by minimizing some other features, i.e. number ofnodes, number of iterations or distance to the goal.
The knowledge that a human can provide about the envi-ronment could be not only valuable, but sometimes strictlynecessary for ensuring the success of the mission and forkeeping the robot intact. This knowledge could be learnedif a human pilot, who is aware of the risks, guides the UAVto a local destination avoiding with sufficient security therisky obstacles or areas. Specifically, the risk level of eachdangerous item could be learned individually and then usethis prior knowledge to label further items in the scene thatare known to have a similar level of riskiness. See Figure 1.
In this paper we propose a method that learns the HHKwhen they perform a path by teleoperating the robot. Thelearned knowledge can the adapted and applied to a clas-sical planner in order to modify the solution such that theresulting path looks similar to a human path. The proposedmethod is in between the path planning and the learning bydemonstration method framework. This method embeds thelearned knowledge from the humans in the map in whichthe robot navigates. Using this approach, the knowledge can

be reused with independence of the chosen planner prioradaptation.
The idea behind the method is that the HHK when per-forming an UAV path can be transferred to the environmentobstacles, in such a way that the obstacles are repulsionfields, represented as potential field functions, that deviatethe planned path in a human-like path (see Figure 1). Whatwe learn from the human path is the modification of therepulsion parameters to adjust the planned path to the humanone. These parameters are learned using real trajectoriesgenerated by a human pilot guiding an UAV through acluttered environment. Although we know that this is a riskyassumption, we will prove through the real life experimentsthat could be a good approximation.
In this work we are applying these ideas using a RRTplanner, which takes into account the influence of the objectsin the planned path. There exist several path planners ableto consider an explicitly given analytic function as the onethat we propose. For instance, in [5] the exploratory strengthof the RRT algorithm is combined with the flexibility of acost function defined over the configuration space such thatthe robot is able to navigate through its valleys and saddlepoints. We can easily think on our potential field function asthe cost function required by [5] and use this planner in orderto simulate the trajectories needed for our learning process.Other methods that combine RRT algorithms with potentialfields are proposed in [6][7]. In the latter, the potential fieldis used as a cost function in order to penalize those nodesgenerated by an RRT planner that are far away from thevalleys of the function.
In the following sections we first explain the generalapproach, then the obstacle representation and the repulsionfield. In section III we describe the learning algorithm,describing the identification of the relevant repulsors, theinteraction between them and the optimization procedure toobtain the best parameters. In section IV we explain theadaptation of a RRT based algorithm to take into account theinfluence of the repulsion fields. In section V we describe theexperiments using two different UAV pilots that teleoperatesthe UAVs from different starting points, but following asimilar path. Finally, in section VI, we summarize the work.
II. HHK LEARNING METHODA. General approach
The proposed method learns the HHK when the humanpilots are executing a path, using a general strategy basedon attractors and repulsors, in a similar way that is used inLearning from Demonstration [8] since a path generated bya human pilot is used as reference to learn the parameters ofa model. However, in our case we learn the HHK throughthe repulsion field related to the environment objects.
To introduce the method, we define that any path Pobtained from a path planner is guided by two elements:the attractors ✓
att
and the repulsors ✓rep
.
P = f(✓att
, ✓rep
) (1)
where the f depends strictly on the planner.
The attractor ✓att
represents the planner strategy to gen-erate a path to the goal location. The repulsors ✓
rep
usuallyrepresents the obstacles and prevents the robot to navigatein the zones where collision may happen.
The most straightforward example of this formulation isthe potential path planner where ✓
att
and ✓rep
apply anattractive and repulsive force respectively to the robot ateach point. In this case, the repulsors ✓
rep
are explicit in theobstacles and the attractor ✓
att
is the force exerted by thegoal (see also [9] in the framework of dynamical movementprimitives, DMPs, or [10] in the framework of planning in ahuman-like manner). In the classic RRT, the repulsors ✓
rep
are implicit in the obstacles to provide obstacle avoidancepaths whereas the implicit attractor ✓
att
is the force to reacha solution path toward the goal if it exists. In this paper wepresent a modified version of the RRT* [3] where the planneris partially guided by the repulsors.
The characteristics of the repulsors are modified accord-ingly by means of the learning algorithm to capture theHHK. Each of the map repulsors represents as a sourceof the repulsion field and the global repulsion field iscomputed combining the effect of the different repulsors.The navigation plan at each point of the path is guidedby the repulsion field and the robot navigates following theregions with lowest magnitude in the repulsion field, this is,the valleys.
B. Obstacle representationIn robot navigation, the map is represented by several ob-
jects which, in this work, are static obstacles. Each obstacleis defined by one or more repulsors placed in relevant partsof the obstacle such as the centroid or parts of the perimeter.
The characteristics of each repulsor reflects directly thedanger of navigating close to this location. However it canalso encode other knowledge usually considered by humanssuch as risk and uncertainty.
Let’s denote Rj
the j-th repulsor of the set M =
{R1, R2, . . . , Rn
} which represents the obstacles of the map.The influence of the repulsor R
j
is completely defined bythe tuple of parameters ⇥
Rj =
�
ARj , BRj , r0Rj ,xRj
. Theparameters A
Rj and BRj represent respectively the intensity
and the decay factor of the repulsion. The repulsion includesa safety area modeled by a ball of radius r0Rj in whichthe robot cannot navigate. This parameter is set according tothe robot size to prevent collision with the obstacles in themap during the navigation. Finally, the parameter x
Rj is theposition vector which represents the location of the repulsorin the space.
The repulsion F
Rj (x), in the location x, generated due tothe repulsor R
j
, can be modeled as a force vector with thefollowing expression:
F
Rj (x) = ARj exp
✓
�dRj (x)� r0Rj
BRj
◆
x� x
Rj
dRj (x)
(2)
where dRj (x) is the euclidean distance between the point
x and the location of the repulsor x
Rj and the last termspecifies the orientation of the force vector.

C. Repulsion fieldThe set M is composed by several repulsors which model
the influence of the obstacles in the map. The repulsion fieldis obtained by computing the influence of these repulsors.The learning of the set of HHK repulsor parameters dependson how this repulsion field is defined.
Let’s denote Mx
✓ M the subset of visible repulsorsfrom the point x, i.e. the ones that are in the direct lineof sight from x. Then the repulsion field F , evaluated inthe point x, is defined as a scalar function using F
Rj (x) =
kFRj (x)k in the following expression:
F(x) = max
Rj
FRj (x), 8R
j
2 Mx
(3)
The projections of the set of points of the valleys in therepulsion field, denoted by V
RiRj , are the ones that satisfythe following:
VRiRj =
8
<
:
x
�
�
�
�
�
�
FRi(x) = F
Rj (x)
^FRi(x) � F
Rk(x), 8Rk
2 Mx
9
=
;
(4)
All the projections of the valleys which were generateddue to the influence of the repulsor R
j
, define the repulsorborder @
Rj .
@Rj =
[
VRjRk , 8R
k
2 M, j 6= k (5)
Finally, we define ⌦
Rj as the region in which the repulsorR
j
applies the greatest repulsion force compared to all thevisible repulsors.
⌦
Rj =
�
x
�
�FRj (x) > F
Rk(x), 8Rk
2 Mx
(6)
Note that @Rj does not represent the boundary of the
region ⌦
Rj due to the discontinuities in the mathematicaldefinition of the repulsion field.
III. LEARNING ALGORITHMThe proposed method assumes that the HHK is distributed
in two parts when navigating with a robot, one included inthe path planner and the other one in the obstacles in themap. In this paper we will focus on learning the repulsorsparameters, ⇥
Rj =
�
ARj , BRj , r0Rj ,xRj
, that model theseobstacles using human pilot paths as reference. Therefore theinformation embedded in the obstacles can be reused whenplanning different new paths in the same map.
The proposed algorithm learns the parameters ⇥
Rj byfitting iteratively the valleys of the defined repulsion field intothe pilot paths. In each learning iteration the algorithm firstidentifies which repulsors have to be modified. Afterwardsthis modification is obtained by means of an optimizationproblem posed from an overconstrained system of equationsthat represents the constraints between pairs of repulsors.
In order to simplify the learning process, the algorithm islimited to learn only the parameter B
Rj (instead of BRj
and ARj at the same time) while maintaining the other
parameters equal and constant for all the repulsors. Usuallyr0Rj is a constant value related to the dimensions of therobot and x
Rj depends on the environment.
R2R1
R1
Xt
Xk
R3
R1 3 R
R2 3 R
Fig. 2. Identification of applicable repulsors.
A. Identification of applicable repulsors
The influence of the repulsors are limited to a local area.This implies that the different segments of the pilot pathcan be used to learn the parameters related to a subset ofrepulsors. The following procedure identifies which are theapplicable repulsors in each of the learning iterations.
Let’s denote P = {x1,x2, . . . ,xm
} the human pilot pathand let us define the subset P
Rj = P \⌦
Rj . Then for eachpoint x
t
2 PRj we establish a correspondence to a point in
the border xk
2 @Rj using the following two conditions.
a) Distance condition: Only the points in the nearbyof the point x
t
are considered, i.e. the points that are withina ball of radius dthresh centered in the point x
t
.
Xt,dist =
�
x
k
2 @Rj
�
� kxk
� x
t
k dthresh
(7)
b) Alignment condition: Let nt
denotes the unitary vec-tor tangent to the segment P
Rj at the point xt
. Equivalently,n
@Rj kis defined as the tangent to the boundary @
Rj at thepoint x
k
. Then, only the points xk
such that human path andboundary direction are aligned compared with a threshold↵thresh are considered.
Xt,alig =
n
x
k
2 @Rj
�
�
�
�
�
�
n
i
· n@Rj k
�
�
�
↵thresh
o
(8)
From all the points in the border that satisfy both condi-tions, this is, X
t
= Xt,dist \ X
t,alig, the closest point to thepath point x
t
is selected (see figure 2).
x
k
= argmin
x
kx� x
t
k, x 2 Xt
(9)
If Xt
6= ;, there is a correspondence between the pointx
t
2 PRj and the point x
k
2 @Rj . Since x
k
2 VRiRj ✓
@Rj , the point x
t
has to be considered for the correction ofthe learning of the repulsors R
i
and Rj
. In case Xt
= ;no correspondence has been found and the point x
t
is notconsidered in the following steps of the learning algorithm.
B. Interaction between a pair of repulsors
Defining x
RiRj 2 TRiRj ✓ P as a point such that a
correspondence to another point xk
2 VRiRj has been found
using the previous procedure. Then the set of n points inTRiRj are respectively used to learn the parameters B
Ri andB
Rj of the repulsors Ri
and Rj
.

Let ˆdRj ,TRiRj
be the mean corrected distance from therepulsor R
j
defined as
ˆdRj ,TRiRj
=
1
n
n
X
xRiRj2TRiRj
dRj (xRiRj )� d0Rj (10)
The location of the valley projection VRiRj can be locally
modified by only using the first constraint of the definition(4), i.e. F
j
(x) = Fi
(x). The proposed method modifies onlythe decay ratio parameter B for that purpose and the otherparameters are maintained constant and equal for all therepulsors. Using the model of the repulsors expressed in (2)and the mean corrected distance, the following expressioncan be obtained:
ˆdRj ,TRiRj
BRi =
ˆdRi,TRiRj
BRj (11)
Using this expression the relation between the B param-eters of the pair of repulsors can be computed so that if itis satisfied, the resulting valley projection V
RiRj lies in thenearby of the points x
RiRj 2 TRiRj .
C. Optimization
When the method is applied to the complete pilot path,we have several expressions (11) that relate different pairsof repulsors. The simultaneous fulfillment of all these mul-tiple interconnected relations is usually impossible as theyrepresent an overconstrained system of equations. To solveit, the solution of the system can be posed as an optimizationproblem where the aim is to compute the parameter B of therepulsors.
For each relation between a pair of repulsors Ri
and Rj
an expression is defined such as
fRiRj (BRi , BRj ) = w
RiRj (ˆdRj ,TRiRj
BRi� ˆd
Ri,TRiRjB
Rj )2
(12)where w
RiRj is a weight related to the importance of therelation between the repulsors R
i
and Rj
, computed as thenumber of considered n points, when obtaining ˆd
Rj ,TRiRjin
(10).All the different relations can be stacked in the same
function
f(⇥) =
X
fRiRj (BRi , BRj ), 8R
i
, Rj
2 M (13)
with the vector of parameters ⇥ = [BR1 , BR2 , . . . , BRm ]
T .Additionally, another function is optimized in order to
maintain the values of the B parameters as low as possible.
g(⇥) =
m
X
i
B2Ri
(14)
The optimization function is defined as
J(⇥) = ↵f(⇥) + �g(⇥) (15)
where ↵ � � to prioritize the fulfillment of the definedrelations.
Since the expression J is composed by squared terms andsquared differences, it can be rearranged so that:
J(✓) = ⇥
T
Q⇥ (16)
where Q matrix is composed by diagonal and off-diagonalelements corresponding respectively to the terms multiplyingthe squared parameters and the ones multiplying the crossproduct between different parameters.
Using this expression, the optimization process can beposed as a quadratic programming problem. Several opti-mizers can be applied to solve this problem in which weinclude the bound B 2 [Bmin, Bmax]. The initial value of theB parameter in the repulsors is also set according to Bmin.
The learning algorithm is proposed as an iterative proce-dure in which the repulsor field is to be gradually modified.Therefore, instead of modify the values of the B parametersaccording to the results of the proposed optimization prob-lem, the new values are obtained restricting the variation ofthe parameter value between successive iterations.
Let us define Bk)Rj
as the value of the decay ratio of therepulsor R
j
and as B⇤k)Rj
the value obtained by means of theoptimization in the iteration k. The parameter for the nextiteration is computed as follows:
Bk+1)Rj
= Bk)Rj
+max
⇣
B⇤k)Rj
�Bk)Rj
,�B⌘
(17)
where �B is a restriction in the change of the parameter Bbetween successive iterations. The �B parameter is directlyrelated to the learning rate of the algorithm. Nonetheless, itis convenient to set this parameter to a low value so that thenumber of points of the pilot path used in each iteration ofthe algorithm (see section III-A) varies gradually.
IV. RRT* ADAPTATIONThe aforementioned learning algorithm is able to learn the
parameters of the respulsors to capture the HHK. Then thisinformation can be used in any path planner as long as theinfluence of the obstacles, i.e. the repulsors, can be takeninto account. In this paper, we have adapted the RRT* [3]for this purpose.
Based on the original RRT algorithm, the RRT* definesa cost function that is used to evaluate the different nodes.The cost of a new node is computed when it is connectedto the parent node in the current tree, which includes thecost of the parent node and the cost of the connection.The possible changes in the current connections of the treeare later evaluated in the rewiring step towards probabilisticoptimality. In our approach, we include in the cost functionthe influence of the repulsors.
Let x
c
be the new sample that will be connected tothe current tree using the parent node x
p
. The cost of theparent node is specified by c(x
p
). Let’s denote c⇤(xc
,xp
)
the connection cost between the nodes x
c
and the tree nodex
p
. Then the cost of the new node x
c
is computed asc(x
c
) = c(xp
) + c⇤(xc
,xp
). The cost of the connection c⇤
is defined as follows:
c⇤(xc
,xp
) = (1� �)cd
(x
c
,xp
) + �cr
(x
c
) (18)
where cd
(x
c
,xp
) is computed as cd
(x
c
,xp
) = kxc
�x
p
k/dmax
, being dmax
the maximum distance in the con-nection used during the steering and rewiring steps of the

algorithm. The cost due to the repulsors cr
is defined asthe evaluation of repulsion field in that point with a nor-malization factor c
r
(x
c
) = F(x
c
)/(max F(x)). Lastly, theparameter � 2 [0, 1] weights the relative importance betweenthe length of the path and the influence of the repulsors.
V. EXPERIMENTSA. Environment and pilot trajectories
In order to show the proposed framework for learningthe HHK of the pilots, data from real experiments in acluttered scenario produced by the team of FADA-CATECin the EU ARCAS project [11] has been used. Two differentpilots teleoperated the UAV following the same path but fromdifferent starting points. These paths were captured using anindoor positioning system (VICON).
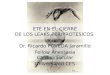
The cluttered environment can be seen in Figure 3, wherethe set of repulsors representing the obstacles of the mockupare shown. Each repulsor shows its identifier, safety areacorresponding to r0Ri (light blue) and an area of influenceproportional to B
Ri (dashed green). Linear repulsors repre-senting aligned group of obstacles have each side representedby a different repulsor so that their properties can be de-scribed independently. Each repulsor R
j
is initialized withdefault values: A
Rj = 1 [N], BRj = 0.3 [m] and r0Rj =
0.25 [m]. The navigation in the map is constrained throughfictitious barriers also represented in the figure (dashed blacklines).
The whole set of paths obtained during the experimentswere classified in two different scenarios. In the first sce-nario, represented by the experiment E1 N, the pilots simplynavigate through the map avoiding the collision with theobstacles. In the second scenario, the pilots were told to con-sider additional risk regarding the obstacles located in the topor bottom (repulsors R4 and R2 in our representation) partof the upper narrow passage represented by the experimentsE3 R and E2 R respectively. The aforementioned paths canbe visualized in Figure 3.
B. Learning of the parameters
The proposed learning algorithm is applied to each one ofthe pilot paths up to 25 iterations. During the identificationof applicable repulsors, the thresholds d
thresh
= 1.5 [m] and↵thresh
= 0.9 were used in (7)-(8). The weights in of theoptimization function (15) were set to ↵ = 10 and � = 1
with the constraints Bmin = 0.3 [m] and Bmax = 1.75 [m].Additionally, the maximum variation of the decay ratiobetween iterations in (17) was limited to �B = 0.1 [m].
Since each experiment contains several paths, the mean ofthe learned parameters was used. In experiment E1 N sincethere were six different paths, only three of them were usedin the learning of the parameters while the others were leftfor validation. On the other hand, due to the small numberof paths in experiments E2 R and E3 R, all paths were usedfor learning of the parameters and also for validation of theresults.
The mean of the parameters BRi and the maximum
difference �BRi to the individual values obtained from
each path is collected in Table I. We can observe how thelearning algorithm captures the risk in each experiment. InE1 N the learned parameters have similar values and closeto the minimum Bmin, since they capture the HHK of pathsin which the obstacles are equally avoided. In E2 R andE3 R the algorithm successfully captures the HHK regardingthe risk related respectively to the repulsors R2 and R4
(highlighted in Table I). Note that when the HHK is learned,not only is the risk captured in the repulsors but also othernavigation features of the expert pilot are obtained as well.These other features include, for instance, the decision ofearly positioning before entering in the lower narrow passagecaptured in the repulsor R3 of E3 R.
Experiment E1 N E2 R E3 R
Ri BRi �BRi BRi �BRi BRi �BRi
R1 0.30 0.00 0.30 0.00 0.55 0.06R2 0.39 0.09 0.87 0.02 0.30 0.00R3 0.35 0.08 0.41 0.01 0.59 0.01R4 0.47 0.08 0.31 0.01 0.79 0.05R5 0.54 0.16 0.36 0.01 0.36 0.00R6 0.30 0.00 0.40 0.01 0.39 0.01R7 0.43 0.17 0.37 0.03 0.39 0.05R8 0.30 0.00 0.30 0.00 0.30 0.00R9 0.32 0.05 0.37 0.02 0.31 0.00R10 0.34 0.05 0.30 0.00 0.30 0.00R11 0.30 0.01 0.30 0.00 0.31 0.01
TABLE ILEARNED PARAMETERS.
C. Validation of the results
To validate the results, the repulsors with the learnedparameters were applied to the adapted RRT* (we adaptedthe implementation of [12]). In this case, the weight used inthe cost function (18) was set to � = 0.85.
We evaluated the resulting path through the area errorcomputed as the mean of the area enclosed between the gen-erated path and all the paths of the pilots in the experiment.This area error is also subdivided into different subareas (1,2 and 3), where subarea 1 includes the lower narrow passage;2 includes the transition between the bottom and upper part;and 3 includes the upper narrow passage. In Table II wecompare the area error of our modified RRT* considering thelearning HHK in the repulsors, with the RRT* consideringonly the euclidean distance in the cost function.
Experiment E1 N E2 R E3 R
Area [m2] Ours Eucl. Ours Eucl. Ours Eucl.Area 1 1.27 1.85 1.05 2.24 0.75 1.4Area 2 2.43 5.56 3.64 9.42 1.64 5.08Area 3 1.90 4.83 1.32 9.54 6.34 10.35
Area total 5.60 12.23 6.01 21.19 8.72 16.82
TABLE IIEVALUATION OF THE RESULTING TRAJECTORIES.
In Figure 3 we can visualize the resemblance of theresulting path in our approach to the pilot paths. Note that

in all the experiments our approach outperforms the RRT*which only considers the euclidean distance.
In E1 N and E2 R, the error is mainly located in Area 2.In this area, the pilot has a vast space without obstacles andtherefore he can navigate freely. Since our approach relies oncapturing the HHK in the map, i.e. the repulsors, this part ofthe navigation cannot be completely characterized. A similarsituation occurs in Area 3 in E3 R as the pilot chooses tokeep a large security distance from the risky obstacles. Ourapproach performs better in cluttered scenarios where theHHK is captured into several obstacles in the map.
VI. CONCLUSIONSIn this paper we have introduced a novel approach to
capture the HHK of human expert pilots using paths of UAVsfrom real life experiments. This HHK has been successfullycaptured in the map representation of the environment usingrepulsors. In the experiments we have also shown how toadapt an RRT* algorithm to include this new informationin the path planning and obtain human-like trajectories. Thenew model has some constraints. It can only be applied togeometric trajectories, not to dynamic ones where velocityand acceleration are taken into account. Moreover the HHKcan only be transferred to physical repulsors, but not towhirlwind or other repulsors that may exist. Future workwill include these issues and the possibility of discoveringnon physical repulsors using this model.
REFERENCES
[1] C. Goerzen, Z. Kong, and B. Mettler, “A survey of motion planningalgorithms from the perspective of autonomous uav guidance,” Journalof Intelligent Robotic Systems, vol. 57, no. 1-4, p. 65100, 2010.
[2] S. LaValle, “Rapidly-exploring random trees: A new tool for pathplanning,” Computer Science Dept., Iowa State University, technicalreport TR 98-11, Tech. Rep., 1998.
[3] E. F. S. Karaman, “Sampling-based algorithms for optimal motionplanning,” The International Journal of Robotics Research, Vol.30, 7,pp.846-894, 2011.
[4] A. Boeuf, J. Cortes, R. Alami, and T. Simeon, “Planning agilemotions for quadrotors in constrained environments,” in IEEE/RSJInternational Conference on Intelligent Robots and Systems, 2014.
[5] L. Jaillet, J. Cortes, and T. Simeon, “Sampling-based path planningon configuration-space costmaps,” Robotics, IEEE Transactions on,vol. 26, no. 4, pp. 635–646, 2010.
[6] O. Khatib, “Real-time obstacle avoidance for manipulators and fastmobile robots,” International Journal of Robotics Research, vol.5,pp.90, 1986.
[7] H. A. M. Svenstrup, T. Bak, “Trajectory planning for robots indynamic human environments,” in Proceedings of the IEEE/RSJ Inter-national Conference on Intelligent Robots and Systems (IROS 2010),pp.4293-4298, 2010.
[8] S. Schaal, “Learning from demonstration,” Advances in neural infor-mation processing systems, pp. 1040–1046, 1997.
[9] ——, “Dynamic movement primitives-a framework for motor controlin humans and humanoid robotics,” in Adaptive Motion of Animalsand Machines. Springer, 2006, pp. 261–280.
[10] G. Ferrer and A. Sanfeliu, “Proactive kinodynamic planning using theextended social force model and human motion prediction in urbanenvironments,” in IEEE/RSJ International Conference on IntelligentRobots and Systems (IROS), pp.1730-1735, 2014.
[11] ARCAS, “Aerial robotics cooperative assembly system,” urlhttp://www.arcas-project.eu, 2013-2016.
[12] O. Adiyatov and H. Varol, “Rapidly-exploring random tree basedmemory efficient motion planning,” in Mechatronics and Automation(ICMA), 2013 IEEE International Conference on, 2013, pp. 354–359.
2 4 6 8 10 120
2
4
6
8
10
x [m]
y [m
]
Area 2 Area 1
Area 3
1
2
3
45
67
89
10
11
(a) E1 N
2 4 6 8 10 120
2
4
6
8
10
x [m]
y [m
]
Area 2 Area 1
Area 3
1
2
3
45
67
89
10
11
(b) E2 R
2 4 6 8 10 120
2
4
6
8
10
x [m]
y [m
]
Area 2 Area 1
Area 3
1
2
3
45
67
89
10
11
(c) E3 R
Fig. 3. Navigating in an environment: without risk (top), with risk onthe top and bottom of the upper narrow passage (middle and bottomrespectively). Pilot paths used for learning of the parameters (cyan), pathsused for validation (blue), RRT* using learned parameters of the repulsors(red), RRT* using euclidean distance (green). The initial and final positionare represented by boxes (yellow and magenta respectively).