Embed Size (px)
DESCRIPTION
Menghitung Koefisien Pegas
Citation preview

Laporan Praktikum Kinematika dan Dinamika
BAB I
PENDAHULUAN
1.1 Tujuan Percobaan
Tujuan yang ingin dicapai pada percobaan kali ini adalah:
Untuk mengetahui harga K ( konstanta pegas )
Untuk mengetahui pengaruh viskositas fluida terhadap harga redaman
(damping sistem) C
Untuk mengetahui pengaruh variasi pegas – redaman K (lk) dan C (lc)
terhadap perilaku system (respon)
1.2 Dasar Teori
1.2.1 Persamaan Gerak – Frekuensi Natural
Sistem berisolasi yang paling sederhana terdiri dari massa dan
pegas seperti ditunjukkan dalam gambar. 1 pegas yang menunjang massa
dianggap mempunyai massa yang dapat diabaikan dan kekakuan k dalam
Newton per meter simpangan. Sistem mempunyai satu derajat kebebasan
karena geraknya digambarkan oleh koordinat tunggal x.
Bila digerakkan isolasi akan terjadi pada frekuensi natural ωn yang
merupakan milik (property) sistem. Kita sekarang mengamati beberapa
konsep dasar yang dihubungkan dengan satu derajat kebebasan.
Hukum Newton kedua adalah dasar pertama untuk meneliti gerak
sistem. Seperti ditunjukkan dalam gambar 1. perubahan bentuk pegas pada
posisi kesetimbangan statik dalam Δ, dan gaya pegas kΔ adalah sama
dengan gaya gravitasi w yang bekerja pada pegas m ;
kΔ = w.mg....................................................................................(1)
Dengan mengukur simpangan x dari posisi kesetimbangan statik,
maka gaya – gaya yang bekerja pada m adalah k (Δ + x ) dan w. Dengan x
yang dipilih positif dalam arah kebawah, semua besaran gaya, kecapatan
dan percepatan juga positif dalam arah ke bawah.
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 1

Laporan Praktikum Kinematika dan Dinamika
Gambar. 1
Sistem pegas massa dan diagram benda bebas
Sekarang hukum Newton kedua untukgerak diterapkan pada massa m.
dan karena k = w, diperoleh
...................................................................................( 2 )
Jelaslah bahwa posisi kesetimbangan statik sebagai kesetimbangan
acuan untuk x mengeliminasi w, gaya yang disebabkan gravitasi, dan gaya
pegas statik k dari persamaan gerak hingga gaya resultant pada m adalah
gaya pegas karena simpangan x saja.
Dengan mendefinisikan frekuensi pribadi angular n sebagai :
ωn² = ......................................................................................( 3 )
Persamaan ( 2 ) dapat ditulis sebagai :
+ ωn² x = 0 ........................................................................... ( 4 )
Dan dengan membandingkan persamaan = - ² x disimpulkan
bahwa gerak adalah harmonik. Persamaan (4), suatu persamaan diferensial
linier orde kedua yang homogen, mempunyai solusi umum sebagai berikut
n n t......................................................... ( 5 )
dengan A dan B adalah kedua konstanta yang perlu. Konstanta – konstanta
ini dihitung dari kondisi awal x ( 0 ) dan x ( 0 ), dan persamaan ( 5 ) dapat
ditunjukkan menjadi :
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 2

Laporan Praktikum Kinematika dan Dinamika
x = sin ωn t + x ( 0 ) cos ωn t........................................... ( 6 )
Periodik natural osilasi dibentuk dari ωn τ = 2π, atau
..................................................................................( 7 )
dan frekuensi natural adalah
...............................................................................( 8 )
Besaran – besaran ini dapat dinyatakan dalam penyimpangan statik
dengan mengamati persamaan ( 1 ), kΔ = mg. Jadi persamaan ( 8 ) dapat
dinyatakan dalam penyimpangan statik Δ sebagai :
........................................................…....................( 9 )
dan frekuensi natural sistem dengan satu derajat kebebasan ditentukan
secara unik oleh penyimpangan statik Δ.
Satuan yang digunakan dalam persamaan diatas harus konsisten.
Misalnya bila g diberikan dalam inch/s², maka Δ harus dalam inch.
Dengan menggunakan g = 9,81 m/ s², Δ harus dalam meter. Namun lebih
mudah menggunakan Δ dalam mm, Δm = Δmm x 10-3, dalam hal ini
persamaan ( 9 ) menjadi :
................................................( 10 )
1.2.2 Getaran Bebas Teredam Karena Kekentalan
Bila sistem linier dengan satu derajat kebebasan dirangsang, maka
responnya akan tergantung pada jenis rancangan dan redaman yang ada.
Bentuk persamaan geraknya pada umumnya adalah :
m + Fd + kx = F ( t ) .............................................................( 11 )
dengan F ( t ) perangsang dan Fd gaya redaman. Walaupun gambaran gaya
redaman sebenarnya sulit, dapat diasumsikan model – model redaman
ideal yang sering menghasilkan perkiraan respons yang memuaskan. Dari
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 3

Laporan Praktikum Kinematika dan Dinamika
model – model ini, gaya redaman karena kekentalan, yang sebanding
dengan kecepatan, dan dinyatakan oleh persamaan :
Fd = cx ......................................................................................( 12 )
Dengan c adalah konstanta redaman secara simbolik gaya ini
dinyatakan oleh peredam seperti pada gambar 2. Dari diagram benda bebas
persamaan geraknya dapat ditulis sebagai :
m x + cx + kx = F ( t ) ...........................................................( 13 )
Solusi persamaan diatas ada dua macam F(t) = 0, maka diperoleh
persamaan diferensial homogen yang solusinya sesuai dengan getaran
teredam bebas. Dengan F(t) 0, diperoleh solusi khusus yang disebabkan
karena rangsangan tanpa tergantung pada solusi homogen. Mula – mula
akan diperiksa persamaan homogen yang memberi pengertian tentang
peranan redaman. Dengan persamaan homogen :
m x + cx + kx = 0 ..................................................................( 14 )
maka pendekatan yang biasa adalah memisalkan solusi dengan betuk
x = est.........................................................................................( 15 )
Gambar. 2
Sistem pegas massa – redaman dan diagram benda bebas
Dengan s adalah konstanta. Dengan mensubtitusikan kedalam
persamaan diferensial, diperoleh :
yang dipenuhi untuk semua nilai t, bila :
.............................…......................................(16 )
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 4

Laporan Praktikum Kinematika dan Dinamika
Persamaan ( 16 ), Yang dikenal sebagai persamaan karakteristik,
mempunyai dua akar
......................................................( 17 )
Jadi solusi umum persamaan gerak diberikan oleh persamaan
.....................................................................( 18 )
Dengan A dan B adalah konstanta yang harus dihitung dari kondisi
awal x(0) dan x(0).
Persamaan ( 17 ) yang disubtitusikan kedalam persamaan ( 18 )
menghasilkan :
.........................( 19 )
Suku pertama adalah fungsi waktu yang meluruh
(decaying) secara eksponensial. Tetapi sifat suku – suku didalam kurung
tergantung pada nilai numeric dibawah akar yaitu apakah positif , nol atau
negatif.
Bila suku redaman ( c/2m)² lebih besar dari k/m, maka eksponen
pada persamaan diatas merupakan bilangan rill dan getaran tidak mungkin.
Keadaan ini disebut teredam ( overdamped ).
Bila suku redaman ( c/2m)² kurang dari k/m, maka eksponen
menjadi bilangan khayal, . Karena
maka suku – suku persamaan ( 19 ) dalam kurung adalah berisolasi.
Keadaan ini disebut kurang teredam ( underdamped ).
Sebagai batas gerak berisolasi dan gerak tanpa berisolasi
didefinisikan redaman kritis sebagai nilai c yang mereduksi nilai dibawah
tanda akar (radikal) menjadi nol.
Selanjutnya dilakukan pemeriksaan terhadap tiga keadaan itu
dengan lebih teliti, dengan menggunakan besaran – besaran yang dipakai
dalam praktek dan dimulai dari redaman kritis.
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 5

Laporan Praktikum Kinematika dan Dinamika
Redaman kritis, untuk redaman , radikal dalam persamaan ( 19 )
adalah :
............................( 20 )
Nilai suatu redaman biasanya dinyatakan dalam redaman kritis
oleh rasio nondimensional
......................................................................................( 21 )
yang disebut rasio redaman, dengan mengingat bahwa,
akar persamaan ( 17 ), dinyatakan dalam sehingga persamaan ( 17 )
menjadi :
............................................................( 22 )
dan ketiga keadaan redaman yang dibahas diatas sekarang tergantung pada
apakah lebih besar dari, kurang dari, atau sama dengan satu.
Gambar ( 3 ) menunjukkan persamaan ( 22 ) yang digambar pada
bidang kompleks dengan sepanjang sumbu harizontal. Bila = 0,
persamaan ( 22 ) menjadi /ωn = ± I sehingga
akar pada sumbu khayal menunjukka keadaan tanpa redaman. Untuk 0 ≤ ξ
≤ 1, persamaan (22) ditulis kembali menjadi :
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 6

Laporan Praktikum Kinematika dan Dinamika
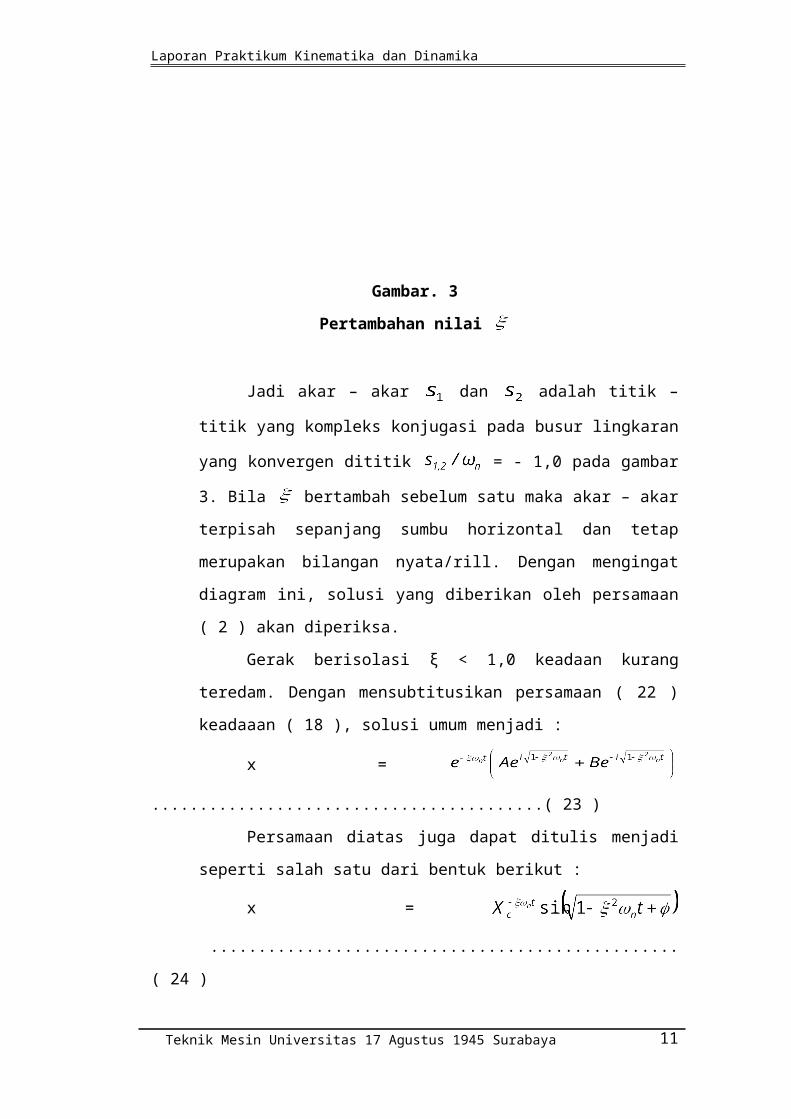
Gambar. 3
Pertambahan nilai
Jadi akar – akar dan adalah titik – titik yang kompleks
konjugasi pada busur lingkaran yang konvergen dititik = - 1,0 pada
gambar 3. Bila bertambah sebelum satu maka akar – akar terpisah
sepanjang sumbu horizontal dan tetap merupakan bilangan nyata/rill.
Dengan mengingat diagram ini, solusi yang diberikan oleh persamaan ( 2 )
akan diperiksa.
Gerak berisolasi ξ < 1,0 keadaan kurang teredam. Dengan
mensubtitusikan persamaan ( 22 ) keadaaan ( 18 ), solusi umum menjadi :
x = .........................................( 23 )
Persamaan diatas juga dapat ditulis menjadi seperti salah satu dari
bentuk berikut :
x = .................................................( 24 )
= ....................( 25 )
dengan konstanta – konstanta atau ditentukan dari kondisi
awal.
Dengan kondisi awal x ( 0 ) dan x ( 0 ), dapat ditunjukkan bahwa
persamaan ( 25 ) menjadi :
x ...( 26 )
Persamaan ini menunjukkan bahwa frekuensi getaran teredam
adalah sama dengan :
.............................................................( 27 )
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 7

Laporan Praktikum Kinematika dan Dinamika
Gambar 4.Getaran teredam < 1,0
Gerak teredam kritis = 1,0. Untuk = 1, diperoleh akar ganda
= = , dan kedua suku persamaan ( 18 ) bergabung hingga membentuk
suku tunggal
..........................................................( 28 )
yang kurang dalam jumlah konstanta yang dibutuhkan untuk memenuhiu
kondisi awal x ( 0 ) dan x (0) dapat dicari dari persamaan (26) dengan
mengambil 1.
..............................................
( 29 )
Gambar 5 menunjukkan tiga jenis respons dengan simpangan awal
x (0). Bagian – bagian yang bergerak pada banyak meter dan instrumen
adalah teredam untuk mencegah penyimpangan yang melampaui batas
osilasi.
Gambar 5.Gerak teredam kritis = 1,0
1.2.3 Penurunan Logaritmik
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 8

Laporan Praktikum Kinematika dan Dinamika
Salah satu cara untuk menentukan jumlah redaman yang ada dalam
system dengan cara mengukur laju peluruhan osilasi bebas. Makin besar
redamannya, makin besar laju peluruhannya.
Suatu getaran teredam yang dinyatakan oleh persamaan (24) yaitu :
yang ditunjukkan secara grafik pada gambar ( 6 ) disini dengan
menggunakan istilah pengurangan logaritmik ( logaritmic decrement )
yang didefinisikan sebagai logaritma natural dan rasio dua amplitudo yang
berurutan. Jadi pengurangan logaritmik menjadi :
.........( 25 )
dan nilai –nilai dari sinusnya adalah sama, bila waktu ditambah dengan
periode redaman d, mak hubungan diatas menjadi :
...............................( 26 )
Gambar.6
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 9

Laporan Praktikum Kinematika dan Dinamika
Laju peluruhan osilasi yang diukur dengan pengurangan logaritmik
dengan mensubtitusikan periode redaman d = 2 / n , maka
pengurangan logaritmik diatas menjadi :
.................................................................................( 27 )
yang merupakan persamaan yang eksak bila kecil, , dan
diperoleh persamaan pendekatan :
Gambar dibawah ini menunjukkan diagram nilai – nilai yang eksak
maupun pendekatannya sebagai fungsi
Gambar 7.
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 10
Laporan Praktikum Kinematika dan Dinamika
Pengurangan logaritmik sebagai fungsi
1.3 Langkah Percobaan
Percobaan kekakuan pegas:
Pasang pegas pada tempatnya
Ukur dan catat panjang pegas mula – mula tanpa pembebanan
Pasang beban F (buah timbangan) pada pegas, untuk harga beban N: 10 N;
12,5 N; 15 N; 17,5 N; 20 N (ambil harga g = 10 m/s2)
Catat perpindahan (displacement) pegas pada tiap perubahan beban
Percobaan redaman:
1. Siapkan peralatan, pasang ball point & kertas grafik pada tempatnya
2. Pasang pegas dan redaman dengan fluida pelumas mesran MS-40 pada
tempatnya dan ukur posisi masing – masing lc = 0,2 m dan lk = 0,4 m
3. Hidupkan motor pemutar kertas grafik
4. Berikan simpangan pada ujung poros sebesar X = 30 mm kemudian
lepaskan
5. Ukur X1 dan X2 dari grafik yang diperoleh
6. Lakukan langkah 2 dengan merubah lk = 0,6 m
7. Lakukan langkah 3,4, dan 5
8. Lakukan langkah 2 dengan merubah lc = 0,4 m dan lk = 0,6 m
9. Lakukan langkah 3,4, dan 5
10. Ulangi langkah 2 sampai dengan 9 dengan merubah fluida peredam
minyak tanah
1.4. Gambar Sederhana Alat Percobaan.
Kontruksi alat uji
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 11

Pegas
Laporan Praktikum Kinematika dan Dinamika
Pemodelan mekanik
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 12
lc
lk
kc

Laporan Praktikum Kinematika dan Dinamika
BAB II
ANALISA DATA HASIL PRAKTIKUM
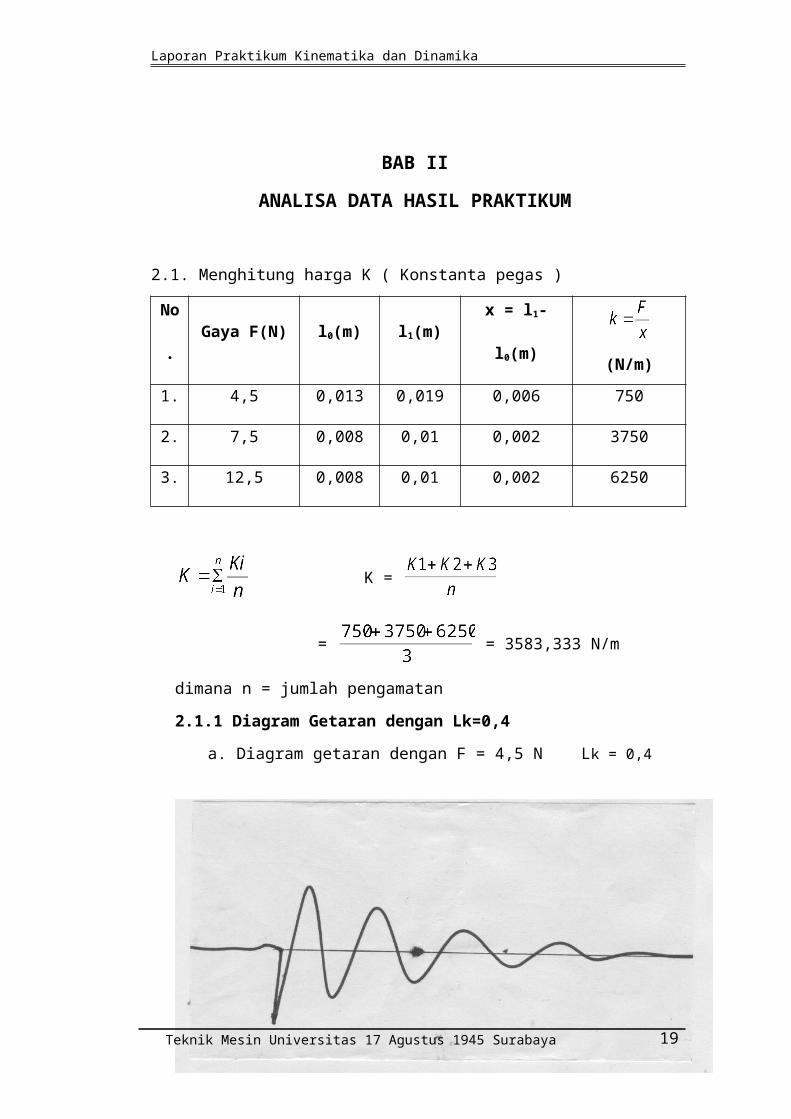
2.1. Menghitung harga K ( Konstanta pegas )
No. Gaya F(N) l0(m) l1(m) x = l1-l0(m) (N/m)
1. 4,5 0,013 0,019 0,006 750
2. 7,5 0,008 0,01 0,002 3750
3. 12,5 0,008 0,01 0,002 6250
K =
= = 3583,333 N/m
dimana n = jumlah pengamatan
2.1.1 Diagram Getaran dengan Lk=0,4
a. Diagram getaran dengan F = 4,5 N Lk = 0,4
b. Diagram getaran dengan F = 7,5 N Lk = 0,4
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 13

Laporan Praktikum Kinematika dan Dinamika
c. Diagram getaran dengan F = 12,5 N Lk = 0,4
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 14

Laporan Praktikum Kinematika dan Dinamika
2.2 Menghitung Harga C (koefisien peredaman) untuk tiap–tiap fluida
redaman
a) Fluida peredam SAE MS 20W-50 lc = 0,1 ; Lk = 0,4
Data :
Lc = 0,1 m
Lk = 0,4 m
X = 0,024 m
X = 0,019 mm
M = 0,75 kg
δ = ln
= ln
= 0,234
ξ =
=
= 0,077
ωn =
=
= 712,3
C = 2m.ωn.ξ
= (2).(0,75).(712,2).(0,077)
= 82,3 N.s/m
K = 3583,333 N/m
b) Fluida peredam SAE MS 20W-50 lc = 0,1 ; Lk = 0,5
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 15

Laporan Praktikum Kinematika dan Dinamika
Data :
Lc = 0,1 m
Lk = 0,5 m
X = 0,01 m
X = 0,08 mm
M = 0,75 kg
δ = ln
= ln
= 0,223
ξ =
=
= 0,075
ωn =
=
= 1197,2
C = 2m.ωn.ξ
= ( 2 ).(0,75).(1197,2).(0,075)
= 134,6 N.s/m
K = 3583,333 N/m
c) Fluida peredam SAE MS 20W-50 lc =0,1 ; Lk = 0,6
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 16

Laporan Praktikum Kinematika dan Dinamika
Data :
Lc = 0,1 m
Lk = 0,6 m
X = 0,004 m
X = 0,003 mm
M = 0,75 kg
δ = ln
= ln
= 0,288
ξ =
=
= 0,085
ωn =
=
= 1409,3
C = 2m.ωn.ξ
= (2).(0,75).(1409,3).(0,085)
= 179,7 N.s/m
K = 3583,333 N/m
d) Fluida peredam minyak goreng lc = 0,1 ; Lk = 0,4
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 17

Laporan Praktikum Kinematika dan Dinamika
Data :
Lc = 0,1 m
Lk = 0,4 m
X = 0,019 m
X = 0,017 mm
M = 0,75 kg
δ = ln
= ln
= 0,111
ξ =
=
= 0,053
ωn =
=
= 770,4
C = 2m.ωn.ξ
= ( 2 ).(0,75).(770,4).(0,053)
= 61,2 N.s/m
K = 3583,333 N/m
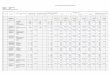
2.3 Tabel Data dan Hasil Perhitungan Pengamatan Redaman (damping)
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 18
Laporan Praktikum Kinematika dan Dinamika
No
Fluida
peredam
SAE
Lc
(m)
Lk
(m)
X
(m)
X
(m)
= ln = n =
( I /dt )
C = 2m.
n. K
(N/m)
1MS
20W-500,1 0,4 0,024 0,019 0,234 0,077 712,3 82,3 3583,333
MS
20W-500,2 0,4 0,017 0,011 0,435 0,105 712,3 112,2 3583,333
MS
20W-500,3 0,4 0,01 0,004 0,916 0,152 712,3 162,4 3583,333
2MS
20W-500,1 0,5 0,01 0,008 0,223 0,075 1197,2 134,6 3583,333
MS
20W-500,2 0,5 0,006 0,004 0,405 0,101 1197,2 181,4 3583,333
MS
20W-500,3 0,5 0,006 0,003 0,693 0,132 1197,2 237,1 3583,333
3MS
20W-500,1 0,6 0,004 0,003 0,288 0,085 1409,3 179,7 3583,333
MS
20W-500,2 0,6 0,008 0,006 0,288 0,085 1409,3 179,7 3583,333
MS
20W-500,3 0,6 0,007 0,004 0,560 0,119 1409,3 251,6 3583,333
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 19

Laporan Praktikum Kinematika dan Dinamika
4Minyak
Goreng0,1 0,4 0,019 0,017 0,111 0,053 770,4 61,2 3583,333
Minyak
Goreng0,2 0,4 0,012 0,008 0,405 0,101 770,4 116,7 3583,333
Minyak
Goreng0,3 0,4 0,007 0,004 0,560 0,119 770,4 137,5 3583,333
2.4 Gambar Grafik Getaran
a. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,1 Lk=0,4
b. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,2 Lk=0,4
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 20

Laporan Praktikum Kinematika dan Dinamika
c. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,3 Lk=0,4
d. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,1 Lk=0,5
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 21

Laporan Praktikum Kinematika dan Dinamika
e. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,2 Lk=0,5
f. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,3 Lk=0,5
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 22

Laporan Praktikum Kinematika dan Dinamika
g. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,1 Lk=0,6
h. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,2 Lk=0,6
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 23

Laporan Praktikum Kinematika dan Dinamika
i. Grafik getaran dengan peredam Mesran SAE 20W-50 lc=0,3 Lk=0,6
j. Grafik getaran dengan peredam minyak goreng lc=0,1 Lk=0,4
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 24

Laporan Praktikum Kinematika dan Dinamika
k. Grafik getaran dengan peredam minyak goreng lc=0,2 Lk=0,4
l. Grafik getaran dengan peredam minyak goreng lc=0,3 Lk=0,4
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 25

Laporan Praktikum Kinematika dan Dinamika
Analisa grafik tanpa redaman :
Semakin berat beban yang diberikan pada lengan maka grafikyang
dihasilkan akan semakin pendek ( displacemen ) karena pengaruh beban.
Bila nilai kostanta pegas semakin tinggi maka grafik akan semakin pendek
( displacemen ) karena gaya dari beban banyak diredam oleh pegas.
Analisa grafik dengan redaman :
Semakin panjang letak pegas maka jumlah grafik yang dihasilkansemakin
sedikit.
Semakin tinggi nilai kekentalan redaman maka jumlah garfik yang
dihasilkan semakin sedikit.
Semakin panjang letak redaman ( jarak redaman dan pegas semakin
pendek ) maka nilai redaman semakin tinggi dan ini mempengaruhi grafik yang
dihasilkan semakin pendek ( displacemen ).
BAB III
KESIMPULAN
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 26

Laporan Praktikum Kinematika dan Dinamika
Dari analisa dapat disimpulkan ada 4 Faktor penting yang mempengaruhi
momen getar:
1. Fluida
Semakin kental suatu Fluida semakin baik pula dalam meredam
suatu getaran, dan semakin cair suatu Fluida semakin kurang dalam
mengatasi suatu getaran.
2. Jarak selisih antara redaman ( Lc ) dangan Pegas ( Lk )
Semakin jarak kecil selisih antara redaman ( Lc ) dengan pegas ( Lk )
semakin bagus pula dalam mengatasi getaran dan semakin jauh jarak slisih
redaman ( Lc) dan pegas ( Lk ) semakin jelek dalam mengatasi redaman.
3. Jarak redaman ( Lc ) ke simpangan
Semakin dekat redaman ( Lc ) ke beban semakin baik dalam
mengatasi getaran, begitu pula sebaliknya apabila redaman ( Lc ) yang
mempunyai jarak yang jauh dari beban, semakin jelek dalam mengatasi
redaman.
4. Jarak pegas ( Lk ) ke simpangan
Semakin pegas dekat dengan beban maka getarannya semakin naik,
begitu pula sebaliknya apabila pegas ditempatkan jauh dari beban maka
getarannya lebih pelan dibandingkan dengan pegas yang dekat dengan
beban.
Dari hasil kesimpulan diatas, dapat dipilih peredam yang paling baik dalam
mengatasi getaran diantara 6 gambar tersebut adalah gambar 3 pada Fluida MS 40
dimana untuk Fluida yang baik jarak Lc dan Lk yang dekat akan Sangat baik
untuk mengatasi redaman Lc: 0,4 m dan Lk : 0,6 m, nilai lenjutan kecil yaitu X1:
15,5 mm dan X2: 6 mm akan sangat aman mengatasi statu redaman.
Teknik Mesin Universitas 17 Agustus 1945 Surabaya 27