Embed Size (px)
Citation preview

Politechnika Łódzka
Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki
mgr inż. Bartosz Dominikowski
Streszczenie pracy doktorskiej pt.:
Korekcja właściwości metrologicznych trakcyjnych
liczników energii elektrycznej
Praca doktorska
wykonana pod kierunkiem
dr. hab. Krzysztofa Pacholskiego, prof. PŁ
Łódź 2015

1
SPIS TREŚCI
Wykaz najważniejszych oznaczeń i akronimów: ..................................................................................... 2
1. Wstęp .................................................................................................................................................. 3
2. Cele i tezy rozprawy............................................................................................................................. 5
3. Korekcja błędu przetworników mocy czynnej ..................................................................................... 7
3.1. Wpływ korekcji wzmocnienia na właściwości metrologiczne pokładowego licznika trakcyjnego
........................................................................................................................................................... 14
4. Układy korekcyjne wspomagane sterownikiem rozmytym .............................................................. 18
5. Posumowanie i uwagi końcowe ........................................................................................................ 27
Bibliografia: ........................................................................................................................................... 29

2
Wykaz najważniejszych oznaczeń i akronimów:
||X|| - wartość skuteczna sygnału X
A – wzmocnienie wzmacniacz operacyjnego
AV - wzmocnienie ustawione za pomocą wzmacniacza VVA
di/dt -szybkość zmian sygnału
g - wzmocnienie wyznaczone przez μP w układzie korekcji wzmocnienia toru pomiarowego
Ip - prąd pierwotny przetwornika prądowego
ks - współczynnik szczytu
ksI - współczynnik szczytu mierzonego prądu
ksU - współczynnik szczytu mierzonego napięcia
N - cyfrowy sygnał wyjściowy w postaci słowa bitowego
s - poślizg prędkości obrotowej silnika
S - szybkość narastania sygnału
Vi - wejściowe napięcie przetwornika napięciowego
Vin - wejściowe napięcie wzmacniacza PGA
Vout - wyjściowe napięcie mnożnika pracującego w układzie korekcji wzmocnienia toru pomiarowego
xmI - względna wartość amplitudy prądu odniesiona do wartości nominalnej
xmU - względna wartość amplitudy napięcia odniesiona do wartości nominalnej
δ A/C - błąd rozdzielczości przetwornika A/C
εCMF -klasa dokładności przetwornika prądowego,
εECF -klasa dokładności licznika
εEMF - całkowity błąd licznika
εVMF- klasa dokładności przetwornika napięciowego,
λ - współczynnik mocy
FB – (ang. Feedback) – sprzężenie zwrotne
FS – (ang. full scale) – peny zakres pomiarowy
MCU – (ang. microcontroller) - mikrokontroler
MULT – (ang. multiplier) – monolityczny mnożnik
PGA – (ang. Programmable Gain Amplifier) – wzmacniacz o programowalnym cyfrowo wzmocnieniu
VVA – (ang. Voltage Variable Attenuator) - wzmacniacze ze wzmocnieniem sterowanym napięciem
WO – scalony wzmacniacz operacyjny
FLC – (ang. fuzzy logic controller) – sterownik rozmyty
BLDC –(ang. BrushLess Direct-Current motor) - bez szczotkowy silnik prądu stałego

3
1. Wstęp
Napędy stosowane w szynowych pojazdach trakcyjnych sterowane są za pomocą
grupy przekształtników energoelektronicznych obciążonych asynchronicznymi lub
bezszczotkowymi silnikami prądu stałego (ang. BLDC). W następstwie zastosowania
półprzewodnikowych układów mocy, sterujących pracą tych silników w obwodzie
zasilającym, jednostkę napędową zastosowania trakcyjnego (EZT) o szybkości zmian
wartości skutecznej nieprzekraczającej 420 A/ s.
Ze względu na profil jazdy zespołu trakcyjnego (EZT) na trasie przewozowej,
dochodzi do częstej zmiany wartości skutecznej mierzonego prądu obciążenia w szerokim
zakresie pomiarowym o wartości maksymalnej podczas rozruchu.
Nowoczesne rozwiązania pojawiające się na rynku elektronicznym, to przede
wszystkim liczniki energii elektrycznej o dużym stopniu integracji, pozwalające na pomiar
składowej stałej lub podstawowej harmonicznej, z niewielkim udziałem wyższych
składowych odkształconych, wejściowego sygnału sinusoidalnie zmiennego [23]. Problemem
w tych scalonych licznikach energii elektrycznej jest brak możliwości płynnej regulacji
wzmocnienia wzmacniacza operacyjnego, w wejściowym kanale pomiarowym. Wzmocnienie
to jest ustalane programowo lub ręcznie, przez podanie stanu wysokiego lub niskiego, na
odpowiednie końcówki uwydatnione, jako piny układu scalonego.
Wymienione liczniki scalone są przydatne metrologicznie przy pomiarach sygnałów
stałoprądowych DC lub sinusoidalnie zmiennych AC, dla których zachowują swoją klasę
dokładności. Stała wartość współczynnika przetwarzania toru prądowego lub zmienna
z dużym krokiem wpływa na powstawanie błędów pomiarowych rzeczywistych przebiegów
całkowitego prądu mierzonego. W szwajcarskim liczniku firmy LEM przetworniki prądu
i napięcia podłączone są w sposób bezpośredni do modulatorów analogowo-cyfrowych.
W układach tych nie ma możliwości korekcji wzmocnienia sygnału bez ingerencji w strukturę
obwodów elektronicznych. Układ mierzący pobraną energię, zaprojektowany przez spółkę
Elester - PKP sp. z o.o. jest wyposażony w analogowy kondycjoner sygnału. Przydatność
pomiarowa tego układu, obciążonego silnikami trakcyjnymi jest niewielka, dla
odkształconego przez falownik energoelektroniczny, szybkozmiennego sygnału prądowego.
Scalone przetworniki przetwarzające moc czynną na częstotliwość firmy Analog Devices
z rodziny podzespołów ADE 775*, mają wejściowe wzmacniacze o programowalnym
wzmocnieniu PGA, regulowane cyfrowo przez podanie zewnętrznego sygnału na

4
odpowiednie piny [23]. Przy tak skonstruowanych kondycjonujących analogowych torach
prądowych, właściwości metrologiczne przetwarzania rzeczywistych sygnałów trakcyjnych,
ulegają pogorszeniu.
Poprawę właściwości metrologicznych licznika można uzyskać, poprzez zastosowanie
układów korekcji błędów przetworników pomiarowych, z wykorzystaniem metod sztucznej
inteligencji. Literatura przedstawia metodę adaptacji parametrów układu pomiarowego, do
parametrów przetwarzanych sygnałów, przy użyciu wzmacniacza programowalnego [6].
Bazuje ona na takim wzmocnieniu sygnału w części analogowej, aby można było
wykorzystać pełny zakres przetwornika A/C. W niniejszej pracy poruszane są zagadnienia,
skorelowane z układami o strukturze zamkniętej ze sprzężeniem zwrotnym, obejmującym
część prądowego toru pomiarowego. Jest to modyfikacja wyżej wspomnianej metody. Celem
wprowadzenia zmian w sposobie przetwarzania sygnału podzespołu pomiarowego jest
przystosowanie go do pracy w warunkach eksploatacji. Minimalizację błędów przetworników
pomiarowych, uzyskuje się poprzez zastosowanie programowalnych procedur korekcyjnych,
zaimplementowanych w systemie mikroprocesorowym. Rozprawa ta podejmuje problem
wykorzystania inteligentnej procedury adaptacyjnej, przy użyciu wzmacniacza ze sterowanym
wzmocnieniem. Metoda ta polepsza właściwości metrologiczne całego licznika, gdy sygnał
prądowy wejściowy ma małą amplitudę, z silnym odkształceniem. Minimalizacji błędu
licznika dokonuje się za pomocą odpowiedniej korekcji wzmocnienia sygnału, do poziomu
nominalnego napięcia przetwornika analogowo-cyfrowego. Wykorzystanie zakresu
analogowego wiąże się z podaniem na wejściu A/C, takiej wartości mierzonej, aby na wyjściu
uzyskać odpowiedź w całym przedziale.
Rozprawa doktorska podejmuje problem korekcji błędu licznika, przez dopasowanie
stałej przetwarzania, zależnej od parametrów opisujących sygnał wejściowy przetwornika
analogowo-cyfrowego. W celu adaptacji wzmocnienia do wartości skutecznej trakcyjnego
prądu obciążenia oraz szybkości jego zmiany, spożytkowane zostały modele sztucznej
inteligencji [16, 17, 18, 19, 20, 21, 22, 23]. Wejściowy pomiarowy wzmacniacz operacyjny
wykorzystuje automatycznie, regulowane wzmocnienie przez zastosowanie odpowiedniej
pętli sprzężenia zwrotnego. Ze względu na duże zmiany wartości skutecznej mierzonego
prądu, wspomaganie korekcji wzmocnienia, zostało zastosowane jedynie w wejściowym
prądowym kanale analogowym licznika.

5
2. Cele i tezy rozprawy
Do niedawna elektrowozy napędzane były za pomocą silników elektrycznych prądu
stałego. Współczesne napędy trakcyjne wykorzystują silniki prądu przemiennego zasilane za
pośrednictwem przekształtników energoelektronicznych. Wykorzystanie tych
przekształtników jest przyczyną odkształcenia prądu zasilającego jednostkę napędową. Przy
ocenie dokładności liczników nie są również uwzględniane dynamiczne zmiany wartości
chwilowej tego prądu, występujące podczas ruszania oraz hamowania zestawu trakcyjnego.
Dlatego w celu zwiększenia dokładności pomiaru energii elektrycznej pobieranej
przez tabor elektryczny, należy korygować stałą przetwarzania toru prądowego liczników
stosowanych do rozliczeń tak, aby wykorzystany był cały jego zakres przetwarzania.
Występowanie tych odkształceń nie jest również uwzględniane w trakcie kalibracji i oceny
dokładności liczników trakcyjnych. Analiza różnych metod korekcji błędu pomiaru mocy
i energii elektrycznej za pomocą liczników użytkowanych obecnie w trakcji elektrycznej,
pozwoliła na sformułowanie następujących tez pracy:
1 Najskuteczniejszym sposobem korekcji błędów trakcyjnych liczników energii
elektrycznej instalowanych na pokładzie elektrowozów jest realizowana w sposób
ciągły modyfikacja stałej przetwarzania toru prądowego tych liczników, niezależnie
od wartości chwilowej prądu zasilającego jednostkę napędową.
2 Do wyznaczenia wartości stałej przetwarzania toru prądowego licznika wykorzystać
można sterownik rozmyty, którego sygnałami wejściowymi są wartość chwilowa
i szybkość zmian prądu zasilającego jednostkę napędową zestawu trakcyjnego oraz
informacja o wartości poślizgu indukcyjnego silnika napędowego elektrowozu.
Wykazanie słuszności przedstawionych w pracy tez wymagało:
1. Przeprowadzenia studium literaturowego dotyczącego:
przebiegu napięcia i prądu linii trakcyjnej,
budowy i działania trakcyjnych liczników energii elektrycznej,
budowy i działania kondycjonerów sygnałów,
metod korekcji błędów przetworników pomiarowych wielkości elektrycznych.
2. Analizy przebiegu prądu zasilającego trakcyjną jednostkę napędową.

6
3. Opracowania modelu falownika za pośrednictwem, którego zasilane są indukcyjne
silniki napędowe elektrowozu.
4. Wyboru struktury sterownika rozmytego oraz jego sygnałów wejściowych
przydatnego do wyznaczania stałej przetwarzania toru prądowego trakcyjnego licznika
energii elektrycznej.
5. Badań symulacyjnych weryfikujących poprawność zaproponowanej w pracy metody
korekcji błędu przetwarzania licznika trakcyjnego.

7
3. Korekcja błędu przetworników mocy czynnej
Cyfrowy pomiar mocy czynnej odbiornika, wykorzystujący scalony mnożnik
analogowych sygnałów napięciowych wymaga zastosowania korekcji, szczególnie
w przypadku wejściowych sygnałów (Rys. 3.1):
odkształconych (parametr ten określany jest przez współczynnik szczytu – ks)
o małych wartościach szczytowych: napięcia - U, prądu- I
o małym współczynniku mocy -
Rys. 3.1. Schemat blokowy przetwornika mocy, gdzie: A – wzmocnienie idealnego wzmacniacz operacyjnego
(WO), A/C - przetwornik analogowo cyfrowy, ×- monolityczny mnożnik, Ip - prąd pierwotny przetwornika, Vi -
wejściowe napięcie, N - sygnał wyjściowy (n- bitowe słowo), Ch1, Ch2- wejściowe kanały pomiarowe [1, 2, 6]
Konieczność zastosowania sprzężenia korekcyjnego (FB) wynika z zalezności na błąd
pomiaru uśrednionego sygnału wyjściowego (Vout) monolitycznego mnożnika (MULT) [6]:
(3.1)
gdzie: - współczynnik szczytu mierzonego napięcia,
- współczynnik szczytu mierzonego prądu, ,
- względne wartości amplitudy napięcia i prądu odniesione do wartości nominalnych, - współczynnik mocy,
- błąd rozdzielczości przetwornika A/C
Ze wzoru (3.1) wynika, że przy dużych przesunięciach fazowych między mierzonym prądem,
a napięciem (mały współczynnik mocy λ) i silnie odkształconym sygnale (duży współczynnik
szczytu) oraz przy małej amplitudzie prądu lub napięcia, nawet przy zastosowaniu
precyzyjnych układów scalonych, należy wziąć pod uwagę wystąpienie dużego błędu
w pomiarze mocy.
W literaturze [6] przedstawiono klasyczny model systemu pomiarowego do realizacji
zadania za pomocą „procedury adaptacji parametrów układu, zależnych od cech
przetwarzanych sygnałów, przy zastosowaniu wzmacniacza o programowalnym wzmocnieniu
np. PGA” (Rys. 3.2).
Vi
N=..001001.. A/C
MULT
Avar
IS×RM
Vo
Ch2
Ch1
WO
A
WO
A
Przetwornik
napięciowy
Przetwornik
prądowy
×
Ip
FB
Vout

8
Rys. 3.2. Schemat strukturalny układu korekcji przetwornika mocy czynnej przy wykorzystaniu wzmacniacza
programowalnego, gdzie: g – wzmocnienie wzmacniacza programowalnego np. PGA, µP – system
mikroprocesorowy, filtr – dolnoprzepustowy (układ uśredniający), xś- wartość średnia mocy, xm – wartość
maksymalna mocy, mnożnik – monolityczny układ realizujący operacje matematycznego iloczynu
Układ przedstawiony na (Rys. 3.2) zbudowany jest z wejściowych obwodów
pomiarowych prądu oraz napięcia, analogowego mnożnika monolitycznego, wzmacniacza
o programowalnym wzmocnieniu (np. PGA- wykorzystującego analogowe układy
przełączające) oraz mikrokontrolera. Mnożnik realizuje operację matematycznego iloczynu
wejściowych sygnałów: napięciowego oraz prądowego , w celu wyznaczenia mocy
elektrycznej pobieranej przez odbiornik. Procedura wyznaczenia poprawki wzmocnienia
analogowego sygnału wyjściowego z filtra (składowej stałej), opiera się na pomiarze przez
pomocniczy układ pomiarowy wartości średniej oraz maksymalnej napięcia wraz
z wpisaniem ich do pamięci wewnętrznej systemu mikroprocesora - . Na podstawie tych
sygnałów, system cyfrowy wyznacza wzmocnienie wzmacniacza np. PGA tak, aby pomiar
odbywał się z jak największym stosunkiem SNR (Signal to Noise Ratio -
stosunek sygnału użytecznego do szumu) przetwornika A/C [6].
Współczynnik SNR jest stosunkiem wartości skutecznej sygnału symetrycznego, do
wartości skutecznej błędu kwantyzacji wyrażonym wzorem dla sygnału sinusoidalnie
zmiennego [4]:
(3.2)
Największy stosunek sygnału sinusoidalnego do szumu kwantowania otrzymamy, gdy
amplituda A sygnału jest na tyle duża , że można ją przetworzyć bez obcięcia jej
wartości na granicy zasilania, za pomocą przetwornika A/C o granicy zakresu przetwarzania
FS (full scale range, FS=Vmax-Vmin – zakres pomiarowy) [5]:
g
g xś, xm
x
xm
xś
x
i(t)
i(t) u(t)
u(t
)
µP
µP
Wzmacniacz
programowalny
Wzmacniacz programowalny
Pomocniczy
układ pomiarowy
Pomocniczy układ
pomiarowy
xi
xi
xu
xu
Wejściowy
obwód prądowy
Wej ciowy
obwód prądowy
Wejściowy
obwód
napięciowy
Wej ciowy obwód
napięciowy
Mn
ożn
ik
Mnożn
ik
Filtr
Filtr
a/c
a/
c

9
(3.3)
gdzie: – rozdzielczość przetwornika A/C.
Na (Rys. 3.3) zobrazowana jest zależność współczynnika SNR, od wartości amplitudy
sygnału sinusoidalnego zmiennego.
Rys. 3.3. Zależność współczynnika SNR od wartości amplitudy sygnału wejściowego przetwornika A/C
dla rodziny charakterystyk o różnych rozdzielczościach przetwornika (8, 10, 12, 14, 16) – bit. FS – zakres
pomiarowy
Maksymalny współczynnik SNR wyznaczamy na podstawie liniowej zależności:
(3.4)
gdzie: n- rozdzielczość przetwornika A/C
Każdy dodatkowy bit rozdzielczości przetwornika A/C poprawia stosunek SNR
(zal. 3.7) o 6.02dB oraz zmniejsza moc błędu kwantyzacji czterokrotnie.
Rozwiązania oparte na klasycznych modelach korekcji wzmocnienia w kanale
pomiarowym, nie są skuteczne przy szybkozmiennych sygnałach wejściowych, o dużej
szybkości zmian wartości. Wykorzystanie wzmacniaczy programowalnych w systemach
pomiarowych pogarsza ich właściwości metrologiczne ze względu na brak możliwości
załączenia wymaganej stałej wzmocnienia, z uwagi na dużą różnicę między wbudowanymi
wartościami wzmocnienia. Stała przetwarzania programowalnego wzmacniacza jest
wyznaczana za pomocą sterującego sekwencyjnego programu załączającego najbliższą
wartość wzmocnienia, jaką ma zaimplementowaną w swoje monolitycznej strukturze.
Wzmocnienie układów PGA (np. z serii PGA 11×) z zerowym dryftem (temperaturowym
i czasowym nie pozwala na dokładne określenie wzmocnienia toru pomiarowego prądu
obciążenia. Wzmacniacze takie, dzielimy na dwa typy: samozerujące się oraz
10
100
0 0,5 1 1,5 2 2,5 3
SNR
[d
B]
Ain [V]
A/C 8-bit
A/C 10-bit
A/C 12-bit
A/C 14-bit
A/C 16-bit
FS
FS

10
z przetwarzaniem) firmy Texas Instruments o wzmocnieniu przedstawionym w skali binarnej
(potęgi liczby 2) – 1, 2, 4, …, 128 [9].
Zastosowanie takich rozwiązań w pomiarach prądu i napięcia, z towarzyszącym
dużym rozrzutem dynamicznie zmieniającej się wartości mierzonej pomiędzy granicami
zakresu, nie jest przydatne metrologicznie, ze względu na małą czułość układu PGA (duży
odstęp między sąsiadującymi wartościami w szeregu wzmocnienia).
Typowa implementacja wzmacniacza programowalnego w układzie pomiarowym
napięcia Vin, jest sterowana z jednostki mikroprocesorowej (MCU- mikrokontroler)
za pomocą interfejsu jest przedstawiona na (Rys. 3.4).
Rys. 3.4. Wzmacniacz PGA (nieodwracający) z 4-bitowym sterującym interfejsem równoległym, bus- magistrala
komunikacyjna, - rezystory ustalające wzmocnienie napięciowe wzmacniacza, B - bufor, MCU – system
mikroprocesorowy [131]
W pamięci mikrokontrolera MCU zakodowana jest procedura ustalenia
odpowiedniego wzmocnienia wzmacniacza. Na podstawie tego sygnału, załączane są cyfrowo
mikroprzełączniki półprzewodnikowe (S1 …S4) monolitycznego układu PGA. Poprzez
załączanie poszczególnych rezystancji kluczami, możliwe jest uzyskanie wzmocnienia
o różnych wartościach. Rezystancje wewnętrzne wzmacniacza są tak dobrane, że przy
przesunięciu stanu wysokiego od do , uzyskujemy wzmocnienia 1, 2, 4, 8. Ustalane
wzmocnienie układu PGA, pracującego w konfiguracji wzmacniacza nieodwracającego jest
potęgą liczby 2, z wartością maksymalną zależną od ilości szeregowo połączonych
rezystorów. Czas przełączenia wzmocnienia w zintegrowanych PGA wynosi około 200 ns.
Drugą grupą układów o programowanym wzmocnieniu są scalone układy wyposażone
w rezystancję sterowaną napięciem VVA (Voltage Variable Attenuator). Określenie
wzmocnienia sygnału wejściowego uzyskuje się poprzez regulację wartość rezystancji
potencjometru cyfrowego, z zachowaniem niepogarszających się własności szumowych.
Stopień
wyjściowy
Stopień wyj ciow
y
Op Amp
Op
Amp
+
+
Protokół
komunikacyjny
Protokół komunikacyjny
B B B B

11
Nowoczesnym scalonym układem tego typu jest wzmacniacz AD8320 o wartości
wzmocnienia, zmieniającej się cyfrowo według podanego wzoru [10]:
. (3.5)
gdzie: - wzmocnienie wzmacniacza, – wartość decymalna ograniczona do
Wzmocnienie regulowane jest za pomocą funkcji o argumencie 8-bitowego słowa
, zmieniającego się liniowo według (zal. 3.5) z krokiem 0.077, w granicach wartości od
0.316 do 19.95 (26 dB) [V/V]. Wzmacniacz z taką charakterystyką przetwarzania danych
oraz z uwagi na małe odstępy między kolejnymi wartościami wzmocnienia,
zaimplementowanymi w strukturze, przy użyciu odpowiednich algorytmów, staje się
przydatny, jako człon wykonawczy, zmieniający stałą wzmocnienia toru pomiarowego.
Na (Rys. 3.5) porównano charakterystyki wzmocnienia kanału prądowego licznika,
uzyskane na drodze symulacji poprzez podane napięcie wejściowe, będące funkcją liniową
narastającą w całym zakresie pomiarowym. Przebiegi wyjściowe wzmocnienia
uzyskane z sterownika rozmytego oznaczone zostały skrótem FLC (Rys. 3.5a), natomiast
napięcie wejściowe kanału prądowego wspomagane proponowana metodą FLC (Rys. 3.5b).
Wyniki klasycznej korekcji opartej na wzmacniaczu programowalnym oznaczone zostały
skrótami odpowiednio dla wzmacniacza PGA: PGA A1 oraz dla układu VVA: PGA A2.

12
Rys. 3.5. a) Funkcja wzmocnienia, wygenerowana na zadany sygnał, będący wielomianem stopnia pierwszego,
zmieniającym się w granicy całego zakresu pomiarowego. Przebiegi uzyskane są za pomocą: FLC – sterownika
rozmytego, PGA A1 oraz PGA A2-algorytmu napisanego w języku C, wspomagane wzmacniaczem A1 o szeregu
binarnych wartości wzmocnienia oraz A2 – o podanym zakresie regulacji wzmocnienia, b) sygnał wejściowy
przetwornika A/C
Na podstawie przebiegów z (Rys. 3.5a) można zaobserwować różnicę uzyskanego
wzmocnienia pomiędzy sterowanymi układami PGA, a wykorzystanym kontrolerem FLC
generującym funkcję gładką.
Wadami stosowania klasycznej korekcji stałej przetwarzania przy szybkozmiennych
wartościach mierzonych sygnałów toru prądowego oraz napięciowego są:
narzucone wartości wzmocnienia w elektronicznym układzie scalonym – wzmacniacz
PGA (Rys. 3.5),
duże różnice między kolejnymi wartościami wzmocnienia zastosowanego układu
PGA (kolejna wartość wzmocnienia jest dwukrotnie większa od poprzedniej),
problemy z zaprogramowaniem wielowejściowego systemu, opartego o wiedzę
eksperta - układy PGA wykorzystujące rezystancję sterowaną napięciem VVA
(Voltage Variable Attenuator), nie odwzorowują dokładnie dwuwymiarowej funkcji
wzmocnienia (Rys. 3.5),
mikroukłady przełączające, wprowadzające stany nieustalone w sąsiadujących
obwodach,
małe wykorzystanie wspomagającego systemu mikroprocesorowego,
mała liczba sygnałów wejściowych, przy zastosowaniu uproszczonego modelu
sterowania,
0 0.5 1 1.5 2 2.5 30
5
10
15
20A
[V
/V]
czas
powiększenie
0 0.5 1 1.5 2 2.5 30
2
4
6
Vin
a/c
[V
]
czas
satPGA A1
PGA A2 & FLC
FLC
PGA A2
cel PGA A1 FLC PGA A2
PGA A1
PGA A1
FLCPGA A2
a)
a)
b)
b)

13
dla rzeczywistych sygnałów prądu obciążenia, pojawienie się znacznego
dynamicznego błędu toru pomiarowego
14
3.1. Wpływ korekcji wzmocnienia na właściwości metrologiczne
pokładowego licznika trakcyjnego
Dokładność pomiarów uzyskana za pomocą licznika pokładowego energii
elektrycznej, zależy od błędów użytych przetworników prądowych i napięciowych oraz
elektronicznego modułu licznika. Maksymalny błąd całego układu pomiarowego określony
jest wzorem (4.32), a wartość jego nie powinna przekraczać 2% [8 , 14].
(3.6)
gdzie: - całkowity błąd licznika, - klasa dokładności przetwornika napięciowego, - klasa
dokładności przetwornika prądowego, - klasa dokładności licznika
Pokładowe trakcyjne liczniki sprawdzane są na stanowiskach pomiarowych,
wyposażonych w kalibratory DC [5, 3, 24]. Rzeczywiste przebiegi trakcyjne w liniach
jezdnych prądu stałego mają charakter odkształcony. Jest to spowodowane pracą
przekształtników energoelektronicznych w sieci trakcyjnej. Szybka zmiana prądu
w wejściowym obwodzie pomiarowym wpływa na błąd dynamiczny licznika. Błąd ten
definiowany jest, jako różnica pomiędzy wynikiem pomiaru (wartością ukazaną
na wyświetlaczu), a wielkością mierzoną [25, 26]. Do niwelacji tego błędu stosowany jest
wzmacniacz operacyjny o stałym wzmocnieniu, jako układ front-end. Zmiana wartości prądu
obciążenia w obwodzie głównym elektrowozu podyktowana jest przez zmienną pracą
przewozową taboru tzn.: ruszanie, zwalnianie oraz hamowanie odzyskowe. Z uwagi na brak
sterowania stałej wzmocnienia, gdy następuje rozruchu składu kolejowego, informacja
mierzona może ulec utraceniu ze względu na możliwość nasycenia się bufora lub
przetwornika analogowo cyfrowego. Natomiast w sytuacji, gdy tabor porusza się z małą
prędkością, zakres napięcia wyjściowego przetwornika prądowego jest mniejszy od zakresu
przetwornika A/C, co powoduje zwiększenie błędu przetwarzania. Wprowadzenie układu
korekcji (Rys 3.2) pozwala na adaptację stałej skalowania, zależnej od parametrów sygnału
prądowego i zmniejszenie błędu licznika pokładowego. Proponowana metoda ma na celu
odwzorowanie mierzonego sygnału oraz zapewnia dużą dokładność przetwarzania,
nie dopuszczając do nasycania się pracujących bloków elektronicznych. Rozwiązanie tego
problemu przedstawiono na (Rys. 3.5) w zależności od zastosowanego układu wzmacniacza
programowalnego.

15
Trakcyjne liczniki energii elektrycznej nie mają układów wzmocnienia mierzonych
sygnałów. Efektem wprowadzenia korekcji wzmocnienia w obwodzie kondycjonowania jest
brak utraty informacji mierzonej, gdy sygnał przecina granicę nasycenia wzmacniacza
pomiarowego (interfejs przetwornika A/C). Zwiększenie rozdzielczości układu można
uzyskać, przez regulację stałej przetwarzania toru pomiarowego, przy zmniejszeniu
napięciowego zakresu wejściowego (Rys. 3.6b) [99].
Rys. 3.6. Interfejs OA przetwornika A/C przy wzmocnieniu napięciowym: a) G=2 [V/V] dla wartości
wejściowej , b) G=10 [V/V] dla wartości wejściowej , AGND- masa analogowa, DGND-
masa cyfrowa
W taborze szynowym wartość chwilowa sygnału prądowego jest zmienna i zależna od
stanu jego pracy. Podczas jazdy składu kolejowego, wskutek obciążenia linii trakcyjnej,
zakres napięcia wyjściowego z przetwornika prądu jest mniejszy od zakresu przetwornika
A/C. Powodem niedopasowania zakresów pomiędzy pomiarowym obwodem wejściowym
prądu, a układem cyfrowym jest stałowartościowe wzmocnienie w kanale prądowym licznika.
Niezgodność zakresów pomiędzy przetwornikiem prądu i przetwornikiem A/C przyczynia się
do utraty danych wychodzących z przetwornika oraz pogorszenie jego zakresu dynamicznego
[11].
Jeżeli obwody wejściowe są skompensowane, to dokładnie przenoszą parametry
sygnału przetwarzanego. Zatem forsowaniu podlega sygnał wyjściowy z tych obwodów. Jest
to proces niezbędny, ze względu na dynamiczny charakter zmiany wartości prądu oraz dużą
jego prędkość narastania w kanale. Zmiana wartości sygnału w torze pomiarowym prądu,
obejmuje cały zakres wejściowy przetwornika A/C.
A/C 10bit
A/C 10bit
DGND
DGND
Rail-to rail
Rail-to rail
AGND
AGND
Rail-to rail
Rail-to rail
AGND
AGND
A/C 10bit
A/C 10bit
OA
DGND
DGND
G=10
G=10
0.5V
0.5V
a)
a)
b)
b)
G=2
G=2
OA OA

16
Logika rozmyta znajduje zastosowanie w tych zagadnieniach, gdzie użycie logiki
dwuwartościowej stwarza problem ze względu na trudności w zapisie matematycznym
procesu. Korzyści z wykorzystania sterowania rozmytego, polegają na zastąpieniu modeli
matematycznych, których często nie da się sformułować poprzez doświadczenie operatora
procesu, określane za pomocą reguły o postaci: JEŻELI-TO. Zapis taki, oferowany jest przez
sterowniki rozmyte dla wiedzy eksperta. Kontroler rozmyty jest definiowany, jako nieliniowy
stablicowany system sterowania, monitorujący proces w sposób ciągły na podstawie
wejściowych danych czasu rzeczywistego. W systemie rozmytym, każdą charakterystykę
ciągłą nieliniową wejścia/wyjścia sterowanego obiektu, można dokładnie aproksymować
za pomocą skończonego zbioru zmiennych oraz reguł [27]. Sterowniki rozmyte umożliwiają
tworzenie adaptacyjnych systemów sterowania dla dużych zmian wartości obiektu
kontrolowanego [13]. Systemy wejścia/wyjścia oparte na modelach rozmytych są tworzone
tam, gdzie pojawiają się trudności z umiejętnością sterowania procesów szybkozmiennych
z liczbą wejść 2 i więcej.
Zaletami stosowania inteligentnej korekcji współczynnika przetwarzania analogowego
toru pomiarowego (wzmocnienia) są:
polepszone dynamiczne właściwości pomiaru – odpowiednio szybka reakcja
na zmianę wejściowego sygnału,
kompilowanie wartości oraz operatorów rozmytych (np.: operator „I”) w elementarne
obiekty,
brak skokowych zmian wartości wzmocnienia (Rys 3.7) (przebieg –„sterownik
rozmyty”),

17
Rys. 3.7. Przebieg wzmocnienia dla sygnału zadanego typu wielomian stopnia pierwszego narastający
od 0 do granicy zakresu pomiarowego, odpowiedzi sterownika rozmytego oraz zaprogramowanego
wzmacniacza PGA (PGA Op Amp), zaznaczone wartości wzmocnienia z szeregu binarnego:
,
łatwe modelowanie systemu, realizujące skomplikowanie odwzorowanie
wejścia/wyjścia za pomocą wiedzy heurystycznej, wyrażone za pomocą reguł
JEŻELI-TO [57],
polepszenie parametrów dynamicznych przetwornika A/C przez dopasowanie zakresu
źródła sygnału do jego zakresu przetwarzania
wysoka czułość na zmiany sygnału wejściowego,
wielowymiarowość polegająca na dużej liczbie sygnałów wejściowych,
zastosowanie nowoczesnych układów cyfrowych – „rozmyte” procesory [28]
(dualogic procesor ST52T301/E301) – z koprocesorem Fuzzy Logic oraz
mikrokonwertery;
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
5
10
15
20
25
30
35
40
czas spróbkowany
wzm
ocnie
nie
8
16
sterownik rozmyty
PGA Op Amp
18
4. Układy korekcyjne wspomagane sterownikiem rozmytym
Wspomaganie kondycjonowania za pomocą sterownika rozmytego polega na
sterowaniu wartością szczytową sygnału wejściowego przetwornika A/C tak, aby nie
pogorszyć właściwości metrologicznych toru przetwarzania prądu licznika. Stosując do tego
celu system rozmyty, realizujący odwzorowanie wejście/wyjście, pozwalające na
minimalizowanie błędu licznika. Dzięki inteligentnej korekcji, uzyskujemy dobre
odtworzenie rzeczywistego sygnału mierzonego niezależnie od jego wartości chwilowej.
Proponowana metoda jest budowana w oparciu o łatwo interpretowalne parametry procesu
sytemu, przez co staje się bardziej czytelna od klasycznych algorytmów. Skuteczność tej
metody w stosunku do metod algorytmicznych, dokumentują uzyskane wyniki badań
symulacyjnych, systemu rozmytego (Rys. 3.7).
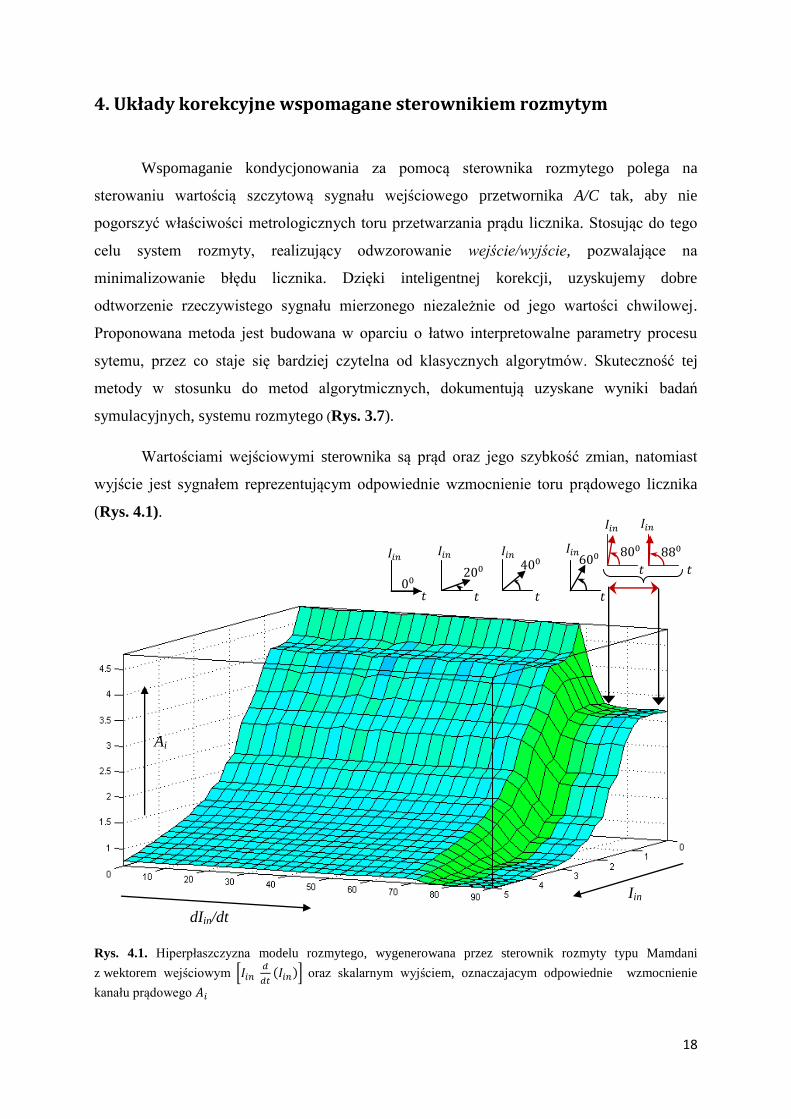
Wartościami wejściowymi sterownika są prąd oraz jego szybkość zmian, natomiast
wyjście jest sygnałem reprezentującym odpowiednie wzmocnienie toru prądowego licznika
(Rys. 4.1).
Rys. 4.1. Hiperpłaszczyzna modelu rozmytego, wygenerowana przez sterownik rozmyty typu Mamdani
z wektorem wejściowym
oraz skalarnym wyjściem, oznaczajacym odpowiednie wzmocnienie
kanału prądowego
Ai
dIin/dt
Iin

19
Zastosowanie wiedzy eksperta, (w systemie rozmytym) określającej sposób
postępowania dla poszczególnych przypadków wartości wejściowych, polega na
zaprojektowaniu odpowiedniej hiperpowierzchni systemu rozmytego. Na wyjściu powinna
być osiągnięta wartość wzmocnienia tak, aby sygnał w torze prądowym osiągnął poziom
bliski napięcia referencyjnego przetwornika A/C. Na (Rys. 4.1) została przedstawiona
hiperpłaszczyzna trójwymiarowa z wejściami reprezentującymi mierzony prąd i szybkość
jego zmian. Szybkość zmian prądu programowo jest przeliczona na stopnie
geometryczne. Powierzchnia ta jest pofałdowana w kierunku osi wzmocnienia w kanale
prądowym Ai. Wzdłuż osi zmienia się ona prawie liniowo, ale tylko do wartości kąta
nachylenia przebiegu sygnału wejściowego równego . Przy większym współczynniku
nachylenia, wartość prądu jest traktowana, jako dynamiczny wzrost w czasie. W celu
szybkiego obniżenia czoła narastania stromego sygnału prądu, zmniejszono maksymalną
wartość wzmocnienia. Współczynnik wzmocnienia , będący analogowym sygnałem
wyjściowym sterownika, wpływa na zmniejszenie sygnału wejściowego do połowy wartości
zakresu, osiąganej przez przetwornik A/C.
Określenie punktu pracy sterownika na płaszczyźnie (Rys. 4.1), realizowane jest przez
pomiar prądu obciążenia w obwodzie elektrycznym elektrowozu, za pomocą prądowego
przetwornika z kompensacją strumienia w rdzeniu, produkowanego przez firmę LEM. Sygnał
prądowy przepływa przez uzwojenie pierwotne. Następnie jest on przetworzony przez
przetwornik pomocniczy A/C(1) i w postaci cyfrowej zostaje wysłany do układu
mikroprocesorowego, przedstawionego na Rys. 4.2.
Rys. 4.2. Schemat kondycjonera, sterowanego systemem µP. Linią przerywaną (”- -”) zaznaczona została droga
wstępnego przetwarzania mierzonego sygnału w kanale prądowym.
Sygnał przekazywany jest do dwóch równoległych torów. Jeden z torów przeznaczony
jest do transmisji tego sygnału, a w drugim wyznaczana jest jego pochodna. W ten sposób
Buff.
Buff.
Vi a/c(1)
a/c(
1)
Diff.
Diff.
Buff.
Buff.
a/c
a/c
c/a
c/a
Iso. Amp.
Iso. Amp.
a/c(2)
a/c(
2)
Wejściowy
obwód
prądowy
Wej ciowy
obwód prądowy
c/a
c/a
PO
RT
PO
RT
MCU
MCU
mnożnik
mnożnik
i(t)
i(t
)
zak.
zak.

20
wejściowe wartości systemu rozmytego zostają przekształcone w wektor wejściowy bloku
rozmywania.
Prezentowany w pracy system typu MISO (multi input single output – system o wielu
wejściach i jednym wyjściu ) (Rys. 4.3), wykorzystany jest do numerycznego wyznaczania
pochodnej sygnału oraz rozdziału na trzy podzakresy pomiarowe, odpowiadające
odpowiadając małym, średnim oraz dużym wartościom sygnału przetworzonego przez
przetwornik A/C(2).
Rys. 4.3. Schemat układu struktury systemu rozmytego, złożonego z bloków dwuwejściowych sterowników,
podzielonych na trzy podzakresy pomiarowe: small, low, high
Dzięki takiemu podziałowi, zbocze opadające oraz narastające mierzonego sygnału
prądowego, szybciej osiąga wymagany poziom wartości. Sygnały o małej amplitudzie
wymagają dużych wartości wzmocnienia. Zakres stosowania proponowanej metody
za pomocą powierzchni systemu rozmytego, dotyczy w szczególności bloku „mały, o dużych
wartościach wzmocnienia. Jest on ograniczony przez napięcia zasilające, układów
elektronicznych kondycjonera w torze prądowym licznika.
Na wyjściu regulatora rozmytego generowany jest sygnał reprezentujący wzmocnienie
i za pośrednictwem przetwornika C/A wyprowadzany jest na wejście monolitycznego
mnożnika. Do drugiego wejścia układu mnożącego dołączony jest sygnał wejściowy.
2di
1
output Ai /A
Terminator2
Terminator1
Terminator
Mux
Mux
Mux
Mux
Interpreted
MATLAB Fcn
MATLAB Fcn5
Interpreted
MATLAB Fcn
MATLAB Fcn
ActionIn1
input sig mea
Out1
Out2
If Action
Subsystem2
ActionIn1
In2
Out1
Out2
If Action
Subsystem1
ActionIn1
input mea sig
Out1
Out2
If Action
Subsystem
u1
if (u1 <= 0.5)
elseIf (..)
else
If
[in]
Goto3
[s1]
Goto2
[s2]
Goto1
[s3]
Goto
-K-Gain3
[in]
From6
[in]
From5
[in]
From4
[in]
From3[s1]
From2
[s2]
From1
[s3]
From
FLC low2
FLC low1
FLC High2
du/dtDerivative
|u|
Abs6
Ai
s
Ai1
Out1sugeno
0-on/ 1 - off
3 motor slip 2 switch on/off A/ Ai
1
input

21
Operacja iloczynu tych wartości przekazywana jest do konwertera A/C(2), który dokonuje
ostatecznego pomiaru prądu (Rys. 4.3).
Metoda wykorzystująca sterownik rozmyty daje lepszą, jakość przetwarzania sygnału,
niż standardowe zastosowanie wzmacniacza PGA sterowanego cyfrowo. Efektywność metody
bazującej na systemie FLC wspomagającej korekcję wzmocnienia, została zweryfikowana
eksperymentem symulacyjnym, mającym na celu zadanie testowej funkcji wejściowej,
narastającej liniowo według krzywej opisanej wielomianem pierwszego stopnia,
zmieniającego się w granicach od 0 do wartości nasycenia bloków elektronicznych.
Przebiegi uzyskane w trakcie symulacji w układzie toru prądowego licznika,
przedstawionym na (Rys. 4.2) zamieszczono na wykresie (Rys. 4.4). Zawiera on dwie krzywe
uzyskane z systemu rozmytego FLC oraz za pomocą wzmacniacza PGA sterowanego
cyfrowo, klasycznym algorytmem.
Rys. 4.4. Przebieg sygnału a) wyjściowego FLC oraz PGA na to samo wymuszenie w postacji funkcji oraz b) usyskane przebiegi napięciowe na wejściu przetwornika A/C.
Z wykresu (Rys. 4.4a) wynika, że procedura przetwarzania sygnału za pomocą bloku
elektronicznego PGA daje gorsze rezultaty, ze względu na małą czułość oraz dużą różnicę
między sąsiadującymi wartościami wzmocnienia. Sterownik FLC generuje funkcję zbliżoną
do paraboloidy, bez znaczących zniekształceń. Na (Rys. 4.4b) zaprezentowane są
0.5 1 1.5 2 2.5 3
5
10
15
20
czas
wzm
ocnie
nie
0 0.5 1 1.5 2 2.5 30
2
4
6
czas
wejś
cie
a/c
[V
]
PGA
FLC
PGA
FLC
a)
a)
b)
b)

22
wzmocnione przebiegi napięciowe na wejściu przetwornika A/C toru prądowego. Widoczna
jest znacząca oscylacja wartości, względem żądanego poziomu. Istotną zaletą propronowanej
metody są lepsze właściwości przy przetwarzaniu sygnałów rzeczywistych, z uwagi na brak
skoku wartości. W celu przedstawienia procedury przetwarzania sygnału przez sterownik
rozmyty, na rodzinę sygnałów o różnych stałych narastania (Rys. 4.5a), został stworzony
wykres trójwymiarowy, gdzie symbol na osi "n[ ]" oznacza odstęp pomiędzy kolejnymi
przebiegami czasowymi (iteracja): odpowiednio od do .
Rys. 4.5. Przebiegi uzyskane na drodze symulacji dla zakresu „małych” wartości przeskalowanego prądu przez
przetwornik wejściowy od 0 do 0.5 [V]: a) jest wartością ostrą wzmocnienia generowanym przez sterownik
rozmyty b) powierzchnia sterowania systemu FLC, c) testowe wejściowe sygnały d) sygnał wejściowy bloku
A/C. Oznaczenia na osiach wykresów odpowiednio: – wartość prądu wejściowego, – stała narastania,
– sygnał zadany, - sygnał wejściowy przetwornika A/C, zak. – zakres pomiarowy
Hiperpłaszczyzna z (Rys. 4.5b) jest ograniczona zakresem przetworzonego prądu,
odpowiadającemu wartości nominalnej zasilania przetwornika cyfrowo-analogowego na
wyjściu sterownika (Rys. 4.2). Układ pętli sprzężenia zwrotnego z przetwornikiem C/A ma za
zadanie wyprowadzić na zewnątrz systemu cyfrowego wartość ostrą na zaciski mnożnika.
Ze względu na wyżej wymienione ograniczenie, pojawia się na zboczu funkcja rampa,
o długości zależnej od wartości sygnału wejściowego (Rys. 4.5d). Odpowiednio dla każdego
wejściowego sygnału, tworzony jest przebieg reprezentujący wzmocnienie (Rys. 4.5a),
o wartości umożliwiającej wykorzystanie pełnego zakresu przetwornika A/C. Sygnał ten wraz
z wejściowym sygnałem napięciowym proporcjonalnym do mierzonego prądu, poddany jest

23
operacji iloczynu w układzie mnożnika. Pozwala to na osiągnięcie przebiegu,
przedstawionego na (Rys. 4.5d) o małych przeregulowaniach w stanie ustalonym.
Sterownik rozmyty pracujący w układzie korekcji, pozwala na szybkie osiągnięcie
zadanej wartości sygnału dopasowywanej do zakresu przetwarzania przetwornika A/C toru
prądowego.
Przebieg przedstawiony na (Rys. 4.6), odwzorowuje prąd linii jezdnej obciążenia
zespołem falowników sterujących silnikami, ruszającego składu szynowego,
przetransformowany na stronę wtórną trakcyjnego przetwornika prądowego LEM.
Rys. 4.6. Przebieg zmierzonego prądu przez przetwornik w zakresie bipolarnym pomiarowym [-5 5] [V]
oraz sygnał uzyskany za pomocą korekcji wspomaganej cyfrowo przez sterownik rozmyty FLC -
Na tym samym wykresie, przedstawiony jest również przebieg napięcia wyjściowego
z członu wykonawczego (mnożnik monolityczny) korektora stałej skalowania, będącego
sygnałem wejściowym przetwornika A/C – sprzężenia korekcyjnego.
W celu zobrazowania przydatności proponowanej metody korekcji, zostały
przedstawione dwa przebiegi sygnału mierzonego w dowolnej chwili, rozciągnięte w czasie.
Ze względu na dużą stromość narastania prądu w obwodzie, układ korekcji wzmacnia sygnał
mierzony do połowy żądanej wartości (Rys. 4.6b). W przypadku łagodnego nachylenia,
sygnał osiąga tę wartość (Rys. 4.6a). Wzmacniacze z programowalnym cyfrowo
0 0.5 1 1.5 2 2.5 3-5
-4
-3
-2
-1
0
1
2
3
4
5
czas
VR
m[V
], V
a/c
[V]
1 1.0005 1.001-2
-1
0
1
2
0.4002 0.4004 0.4006-5
0
5
b)
a)
Va/c
VRm

24
wzmocnieniem z zaimplementowanymi wzmocnieniami w skali binarnej, pracujące
w identycznej strukturze układu korekcji, wprowadzają bardzo duży błąd pomiarowy,
powodując pogorszenie cech metrologicznych licznika. Z tego względu porównano pod
względem przydatności metrologicznej, układy buforujące z niezmienną stałą skalowania,
pracujące w łańcuchowej strukturze jednokierunkowej, z układem opartym na sterowniku
rozmytym. Otrzymany wynik korekcji wzmocnienia toru prądowego, skaluje badany sygnał,
do poziomu zbliżonego do górnej granicy zakresu pomiarowego. Sygnał nie osiąga wartości
znamionowej, ze względu na konieczność zachowania bezpieczeństwa, przed nasyceniem się
bloków elektronicznych.
Ze względu na małą dokładność wyznaczania stałej wzmocnienia toru prądowego na
podstawie sygnałów wejściowych sterownika rozmytego: wartości skutecznej prądu oraz jej
pochodnej, do jego wyjścia dołączony został drugi sterownik FLC(II) (Rys. 4.7)
o dodatkowym sygnale będącym poślizgiem prędkości obrotowej silnika elektrowozu. Na
wyjściu sterownika FLC (II) generowany jest zdeterminowany sygnał reprezentujący
wzmocnienie wejściowego toru prądowego licznika.
Rys. 4.7. Schemat blokowy systemu rozmytego wyznaczającego wzmocnienie na podstawie wektora
wejściowego reprezentującego odpowiednio: -wartość skuteczna prądu, - stałą narastania, s – poślizg,
-wyjścia modelu I oraz II
Sterownika FLC (II) zbudowany jest w oparciu o model wnioskowania TS (Takagi-
Sugeno), w odróżnieniu od modelu Mamdaniego w bazie reguł tego sterownika część IF jest
rozmyta, a część THEN opisana jest zdeterminowaną zależnością funkcyjną. Dzięki temu
sterownik wyjściowy nie zawiera bloku defuzyfikatora, co bardzo upraszcza procedurę
odwzorowującą działanie sterownika i poprawia wydajności mikroprocesora licznika, poprzez
ograniczenie złożoności obliczeniowej.
System rozmyty układu korekcji wzmocnienia toru prądowego licznika złożony jest
z dwóch różnych sterowników rozmytych Rys. 4.7:
FLC (I) oparty na wejściowych zbiorach rozmytych opisanych przez parametry
sygnału prądowego.
FLC (II)
(II)
FLC (2)
FLC (I)
FLC (1)
[º]
º

25
FLC (II) oparty na wejściowych zbiorach opisanych przez wzmocnienie wyjściowe
oraz poślizg s maszyny napędowej.
Z uwagi na występującą wielowymiarowość system zbudowany jest z dwóch
sterowników. Zapisanie oddzielnych reguł jest bardziej zbliżone do języka naturalnego, nie
powodując tym znacznego skomplikowania opisu procesu. Zastosowanie dwóch płaszczyzn
wejścia/wyjścia daje możliwość wyłączenia programowo FLC (II). Pozwala to na pracę
wyłącznie z blokiem FLC (I), gdy skład kolejowy nie jest wyposażony w odpowiednie
czujniki prędkości obrotowej rotora silnika napędowego.
Końcowy sterownik w połączeniu kaskadowym, koryguje uzyskane wzmocnienie ,
w zależności od stanu pracy silnika napędowego. Wyróżniamy trzy stany pracy
asynchronicznej maszyny elektrycznej: rozruch, praca silnikowa oraz hamowanie. Do
określenia stanu pracy maszyny, należy wyznaczyć jej prędkość kątową.
W celu zweryfikowania przydatności dołączonego układu FLC (II), na wejście
systemu rozmytego został podany rzeczywisty przebieg wyjściowy przetwornika prądu
(Rys. 4.8) wygenerowany w programie symulacyjnym oraz sygnał poślizgu prędkości
obrotowej o odpowiedniej wartości dla danego stanu pracy maszyny napędowej.
Rys. 4.8. Przebieg VRm napięcia wyjściowego przetwornika prądowego przeskalowany na sygnał napięciowy
Odpowiedz układu korekcyjnego wraz z wyszczególnieniem momentu pracy danego
sterownika rozmytego została przedstawiona na (Rys. 4.9a) oraz jako przebieg czasowy
wejściowego sygnału toru prądowego licznika (Rys. 4.9b).
0 0.5 1 1.5 2 2.5 3
-4
-2
0
2
4
6
czas
VR
m [
V]
Rozruch Jazda - praca silnikowa Praca prądnicowa (s<0)

26
Rys. 4.9. a) próbki sygnału Va/c przedstawiające chwile włączenia sterownika symbolami: ○ - FLC (I) -
sterownik rozmyty reagujący na parametry mierzonego prądu, □ - FLC (II) - sterownik rozmyty reagujący na
poślizg prędkości silnika asynchronicznego, b) przebieg czasowy napięcia wejściowego Va/c przetwornika A/C(2) przy włączonym sterowniku FLC (II)
Na (Rys. 4.9a) przedstawione są próbki sygnału wejściowego układu A/C(2)
(przetwornik A/C toru prądowego licznika– Rys.4.2). Moment zadziałania sterownika
rozmytego FLC (II) został oznaczony symbolicznie kształtem prostokątnym "□", natomiast
FLC (I) okręgiem "○". Sterownik FLC (II) nie wymaga budowania skomplikowanej
hiperpłaszczyzny wejścia/wyjścia. W celu znalezienia kompromisu pomiędzy wysoką
precyzją, a skutecznością obliczeniową, autor zrezygnował ze skorzystania z modelu
Mamdaniego. Ze względu dużą wydajność obliczeniową. Model rozmytego kontrolera
FLC (II) z wnioskowaniem TS (Takagi-Sugeno) koryguje zmienną wzmocnienia Ai
w zależności od wartości poślizgu maszyny indukcyjnej.
0 0.5 1 1.5 2 2.5 3-5
0
5
czas [nT]
Va/c
[V
]
0 0.5 1 1.5 2 2.5 3-5
0
5
czas
Va/c
[V
]
b)
a)

27
5. Posumowanie i uwagi końcowe
Prezentowana rozprawa doktorska podejmuje próbę wykazania przydatności sterownika
rozmytego do korekcji błędu trakcyjnych liczników energii elektrycznej przyczyną, którego
jest duża dynamika zmian wartości prądu zasilającego jednostkę napędową, elektrycznego
zespołu trakcyjnego (EZT). Korekcja ta polega na odpowiednim doborze stałej przetwarzania
toru prądowego licznika, z uwzględnieniem wartości skutecznej i szybkości zmian tego
parametru oraz odkształcenia prądu zasilającego jednostkę napędową.
Powodem odkształcenia prądu płynącego w linii trakcyjnej jest wykorzystanie
w zmodernizowanym EZT, energoelektronicznych przekształtników mostkowych do zasilania
napędowych silników indukcyjnych. W literaturze przedstawiane są przebiegi prądu
wejściowego tego rodzaju przekształtników. Wykorzystując te przebiegi oraz schemat układu
przekształtnika trakcyjnego, autor rozprawy opracował jego model symulacyjny. Model ten
wykorzystano do oceny przydatności, opracowanego układu korekcji stałej przetwarzania,
wejściowego toru prądowego licznika.
Dokładność wyznaczania wartości energii elektrycznej pobieranej przez jednostkę
napędową EZT uzależniona jest od szeregu czynników. Jednym z tych czynników jest
wykorzystanie zakresów pomiarowych torów wejściowych licznika.
Autor rozprawy zaproponował nową, bazującą na logice rozmytej, procedurę adaptacyjną
parametrów wejściowego toru trakcyjnego licznika energii elektrycznej, do parametrów
przetwarzanych sygnałów. Wprowadzenie adaptacyjnego doboru stałej przetwarzania toru
prądowego minimalizuje błąd pomiarowy, powstającego przy zmianach wartości skutecznej
prądu zasilającego jednostkę napędową zestawu trakcyjnego (EZT). Głównym zadaniem
adaptacyjnej zmiany stałej przetwarzania toru prądowego licznika jest wykorzystanie całego
zakresu przetwornika A/C, występującego na wyjściu tego toru.
W układzie korekcyjnym zastosowano programowy kaskadowy sterownik rozmyty,
zaimplementowany programowo w pamięci mikroprocesora licznika. Sygnałami
wejściowymi pierwszego sterownika kaskady są: wartość skuteczna prądu zasilającego
jednostkę napędową EZT oraz jego pochodna. W sterowniku tym, na podstawie
zdefiniowanych heurystycznych metod podstępowania, wyznaczana jest przybliżona wartość
stałej przetwarzania (wzmocnienia) toru prądowego licznika. Sygnał wyjściowy pierwszego
sterownika przekazywany jest bezpośrednio do jednego z dwóch wejść drugiego sterownika.
Drugim sygnałem wejściowym tego sterownika jest poślizg prędkości obrotowej
indukcyjnych silników napędowych elektrowozu. Wykorzystanie tego parametru pozwala na

28
uwzględnienie, w trakcie wyznaczania wzmocnienia toru prądowego licznika, stanów pracy
elektrycznego zestawu trakcyjnego (EZT): Rozdział zadań na dwa sterowniki zastosowany
został ze względu na wielowymiarowość procedury wyznaczania stałej przetwarzania toru
prądowego licznika o wartości optymalnej, ze względu na wykorzystanie zakresu
przetwarzania tego toru.
Sterownik wejściowy reagujący na wartość skuteczną prądu i jego pochodną został
zaprojektowany w oparciu o model Mamdaniego (M) charakteryzujący się bazą reguł, których
części IF oraz THEN są rozmyte. Dokładność konstrukcji hiperpłaszczyzny wejścia/wyjścia
tego sterownika określona jest liczbą punktów jej podparcia. Od liczby tych punktów
uzależniony jest również czas realizacji procedury, odwzorowującej numerycznie sterownik
M. Ze względu na ograniczoną liczbę tych punktów, sygnał wyjściowy sterownika określa
przybliżoną wartość stałej przetwarzania toru prądowego licznika. Do zwiększenia
dokładności wyznaczania wartości tej stałej, wykorzystany został sterownik wyjściowy
kaskady, który zbudowany jest w oparciu o model Takagi-Sugeno (TS). W odróżnieniu od
modelu Mamdaniego w bazie reguł tego sterownika TS tylko część IF jest rozmyta, a część
THEN opisana jest zdeterminowaną zależnością funkcyjną. Dzięki temu sterownik wyjściowy
nie zawiera bloku defuzyfikatora, co bardzo upraszcza procedurę odwzorowującą działanie
sterownika i poprawia wydajności mikroprocesora licznika, poprzez ograniczenie złożoności
obliczeniowej.

29
Bibliografia:
[1] Lóss P. A. V., Lamengo M. M., Sousa G. C. D., Viera J. L. F., A Single Phase
Microcontroller Based Energy Meter, IEEE Instrumentation and Measurement Technology
Conference, 1998
[2] Ashna K., Sudhish N. George, GSM Based Energy Meter Reading System with Instant
Billing, IEEE, 2013
[3] Otomański P., Zazula P., Charakterystyka metrologiczna stanowiska pomiarowego do
badań liczników energii elektrycznej prądu stałego w zakresie do 4 kV, Przegląd
Elektrotechniczny, 12-2008
[4] Maloberti F., Przetworniki danych C/A A/C, WKŁ, 2010
[5] Kazimierowski M., Wójciak A., Układy Sterowania i Pomiarów w Elektronice
Przemysłowej, WKŁ, Warszawa 1979
[6] Bolikowski J., Podstawy projektowania inteligentnych przetworników pomiarowych
wielkości elektrycznych, Monografie nr 68, Zielona Góra, 1993
[7] Piegat A., Modelowanie i sterowanie rozmyte, Akademicka oficyna wydawnicza EXIT,
Warszawa, 1998
[8] Wymagania PKP Energetyka S.A dla urządzeń do pomiaru energii elektrycznej prądu
stałego, PKP ENERGETYKA, 22 czerwca 2012
[9] Dane katalogowe: Programmable gain amplifier with MUX, www.ti.com, [Online]
http://www.ti.com/lit/ds/symlink/pga116.pdf
[10] Dane katalogowe: Variable gain linear driver, www.analog.com, [Online]
http://www.analog.com/static/imported-files/data_sheets/AD8320.pdf
[11] Carter B., Mancini R., Wzmacniacze operacyjne teoria i praktyka, BTC, Legionowo,
2011
[12] Hank Zumbahlen, Linear circuit design handbook, Analog Devices Inc., 2007

30
[13] Mrozek B., Projektowanie regulatorów rozmytych w środowisku MATLAB-Simulink,
Pomiary Automatyka Robotyka, 11/2006
[14] Dane katalogowe: DI Series Shunt Isolator/ITC series Current Transducers DC & AC
Class accuracy R current measurement, www.lem.com
[15] Dane katalogowe: ST52T430/E430 8-BIT DuaLogic™ Microcontroller with three
timer/pwm drivers and SCI, ST Microelectronics, Styczeń, 2001
[16] Hasse L., Kołodziejski J., Konczkakowska A., Spiralski L., Zakłócenia w aparaturze
elektronicznej, Warszawa, 1995
[17] Handke A., Moce elektryczne pobierane z elektroenergetycznej sieci zasilającej przez
wybrane tyrystorowe prostowniki sterowane, Wydawnictwo Politechniki Poznańskiej,
Poznań, 2011
[18] Tunia H., Winiarski B., Podstawy Energoelektroniki, WNT, Warszawa,1980
[19] Kacprzyk J., Wieloetapowe sterowanie rozmyte, WNT, 2006
[20] Kovacic Z., Stjepan B., Fuzzy Controller Design: Theory and Applications, CRC Press,
December 12, 2005
[21] Sangil Park, Principles of Sigma-Delta Modulation for Analog-to-Digital Converters
DSP, Motorola
[22] Poniński M., Chwaleba A., Siedlecki A., Metrologia elektryczna, WNT, 2000
[23] Nota aplikacyjna: Energy Metering IC with Pulse Output AD 7755*, Analog Devices,
Printed in U.S.A
[24] Otomański P., Zazula P., Stanowisko pomiarowe do oceny właściwości metrologicznych
liczników energii elektrycznych prądu stałego, PAK (Pomiary Automatyka Kontrola), vol. 58,
nr 9/2012
[25] Hagiel R., Zakrzewski J. Miernictwo dynamiczne, WNT, Warszawa, 1984
[26] Marks-Wojciechowska Z., Pacholski K., Kulesza W., Systemy pomiarowe, Politechnika
Łódzka, 1999

31
[27] Driankov D., Hellendoorn H., Reinfrank M., Wprowadzenie do sterowania rozmytego,
Wydawnictwo Naukowo-Techniczne, Warszawa, 1996
[28] Dane katalogowe: ST52T430/E430 8-BIT DuaLogic™ Microcontroller with three
timer/pwm drivers and SCI, ST Microelectronics, Styczeń, 2001



















