Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON COMMUNICATION, VOL. 48, NO. 7, JULY 2000 1217
KALP: A Kalman Filter-Based Adaptive ClockMethod with Low-Pass Prefiltering for Packet
Networks UseKyeong Soo Kim, Member, IEEEand Byeong Gi Lee, Fellow, IEEE
Abstract—In this paper we consider the issue of source clockfrequency recovery in packet networks and propose a newadaptive clock method based on the Kalman filter (KF) withlow-pass prefiltering—KALP (Kalman filter-based Adaptiveclock method with Low-pass Prefiltering) in short. Noting thatbecause of the difficulty in modeling as well as the nonwhiteGaussian nature of the packet jitter most existing adaptive clockmethods could not successfully adopt the Kalman filter, we take anew approach to packet jitter modeling for the KALP. We modelthe packet jitter not directly but after shaping its characteristicsby low-pass prefiltering. This low-pass prefiltering is an importantarrangement as it helps to convert the packet jitter into a low-passsignal regardless of its original characteristics, thus enablingto model the prefiltered packet jitter using a simple first-orderautoregressive [AR(1)] process. The low-pass prefilter shouldbe carefully selected not to lose the timing information whileprefiltering, and the moving averager employed in this papersatisfies this requirement. The AR(1)-modeled jitter component isamenable to the KF-based processing, which in this case becomesan optimal estimator. The design parameters including the initialconditions of the KF and AR(1) parameters can be determinedbased on the service clock specification and packet interarrivaltimes during the delay smoothing process. We carry out varioussimulations to compare the performance of the KALP with theexisting buffer-based adaptive clock method and demonstratethat the KALP can significantly reduce the fluctuation in the levelof receiving buffer as well as the time to recover the source clockfrequency.
Index Terms—Adaptive clock method, Kalman filter, KALP,packet jitter, prefiltering, source clock frequency recovery.
I. INTRODUCTION
RECENT advances in integrated broad-band packet net-works where both real-time and nonreal-time services
are multiplexed and transmitted together in the form of packetstreams have stimulated research in the area of source clockfrequency recovery (SCFR) in packet networks. The SCFRis intended to reproduce the source clock of the sender (i.e.,the source node) at the receiver (i.e., the destination node)
Paper approved by R. Rao, the Editor for Packet Multiple Access of the IEEECommunications Society. Manuscript received August 22, 1997; revised De-cember 17, 1998 and October 7, 1999. This work was supported in part by theKorea Telecom under Contract 23 and by a Special Researcher Fellowship fromthe Institute of New Media and Communications (INMC), Seoul National Uni-versity, Seoul, Korea.
K. S. Kim was with the INMC, Seoul National University, Seoul, Korea. Heis now with PON Systems Research and Development, Lucent Technologies,Murray Hill, NJ 07974 USA (e-mail: [email protected]).
B. G. Lee is with the School of Electrical Engineering, Seoul National Uni-versity, Seoul 151-742, Korea (e-mail: [email protected]).
Publisher Item Identifier S 0090-6778(00)06163-8.
as closely as possible [2]. If the reading clock at the receiveris slower or faster than the average rate at which the sendertransmits packets, buffer overflow or underflow may occur, thusresulting in packet losses or long pulse gaps in the recovereddata stream. So SCFR is an essential function in transmittingreal-time services in packet networks.
The fundamental problem of SCFR in the packet network is inestimating the source clock frequency out of the jittered packetstream. The packet jitter, that is, the fluctuation in packet inter-arrival times, occurs because each packet experiences randomdelay during transit. The large magnitude of packet jitter, to-gether with its strong correlation, makes it very difficult to esti-mate the source clock frequency from the jittered packet stream.Therefore algorithms for SCFR in packet networks should beable to address this issue properly.
Several SCFR schemes [1], [3]–[6] have been proposed.They may be categorized into synchronous and asynchronousSCFR schemes. In the case of the synchronous SCFR schemes,which is depicted in Fig. 1, the sender delivers via the outgoingpacket stream information on the frequency difference betweenthe source clock and the reference clock, which is generatedout of the common network clock available to both the senderand the receiver. The receiver can recover the original sourceclock frequency using this frequency difference informationand the same reference clock.
The asynchronous SCFR schemes differ from the syn-chronous ones in that they extract the source clock informationout of the packet stream itself arriving at the receiver becauseno common network clock is available. Fig. 2 depicts a typicalasynchronous SCFR scheme. Noting that the packet interar-rival time or the buffer fill state at the receiver contains thesource clock frequency information, the receiver extracts thesource clock frequency out of this information by applying anappropriate digital filter. The estimated frequency then drivesthe phase-locked loop (PLL) to regenerate the source clockfrequency. As such, the asynchronous schemes do not resortto the common network clock, and most of them do not needadditional frame structure, at higher layer, for delivery of theinformation on the clock frequency difference.1 Therefore,asynchronous SCFR schemes are applicable to a broader rangeof networks where the common network clock is not availableand adoption of additional frame structure at higher layer is notfeasible. Such an asynchronous SCFR scheme is also calledadaptive clock methodand is recommended as one of standard
1As an exception, the asynchronous scheme proposed in [6] resorts to theframe structure for negative stuffing.
0090–6778/00$10.00 © 2000 IEEE

1218 IEEE TRANSACTIONS ON COMMUNICATION, VOL. 48, NO. 7, JULY 2000
Fig. 1. Basic concept of the synchronous SCFR method.
Fig. 2. Basic concept of the asynchronous SCFR method.
SCFR methods for the ATM adaptation layer (AAL) type 1together with synchronous residual time stamp (SRTS) that isa synchronous SCFR scheme [3]. In this paper, we focus ourdiscussions on this adaptive clock method.
One well-known adaptive clock method is a buffer-basedmethod [1]. The buffer-based method takes the time-averageof the observed receiver buffer state for use in reducing thepacket jitter and estimating the frequency difference betweenthe source and the receiver clocks, which is then used for con-trolling the receiver clock frequency. While the buffer-basedmethod is easy to implement due to its simplicity and indepen-dence of packet jitter characteristics, its convergence speed isrelatively low. This is because the buffer-based adaptive clockmethod does not employ the optimal Kalman estimation algo-rithm but employs a suboptimal estimation algorithm that relieson the long-term averaging effect of packet jitter. The reasonwhy the buffer-based method employed the suboptimal estima-tion algorithm, as described in [1], is that the optimal Kalmanestimation algorithm based on the additive white Gaussiannoise (AWGN) assumption exhibited lack of convergence insimulating the first-come first-served (FCFS) multiplexer. Inaddition, this method did not provide any systematic procedurefor determining its several design parameters including theinitial measurement time interval and the parameterthatcontrols the time sequence to estimate the frequency difference.
In the case of the adaptive terminal synchronization method[4], packet interarrival time is measured instead of the receiverbuffer level, which is then time-averaged for the source clock pe-riod estimation. This method employs a set of design equationsfor determining the order of the time-averaging filter which isbased on the assumption that the probability distribution of eachpacket delay in the packet network is identical and independentof each other. In reality, however, this assumption is not valid in
general, so the equations cannot be applied in determining thedesign parameter.
Regarding the packet jitter characteristics, we have carriedout an extensive simulation study for multi-node packet networkenvironments to get answers to the following two questions [7]:1) Is the AWGN assumption is valid? 2) Is it possible in generalto capture the important characteristics of packet jitters in var-ious network environments using a simple, well-known randomprocess model for use in SCFR? According to the simulation re-sults the answers to both questions were negative: Even thoughthe packet jitter characteristics approach those of AWGN as thenumber of intermediate nodes increases, the packet jitter cannotbe modeled as an AWGN in most cases. In addition, as thepacket jitter characteristics are decided by a number of factorssuch as the source packet period, the background traffic char-acteristics, the node service discipline, and the number of inter-mediate nodes, it is practically impossible to model the packetjitter characteristics using a simple random process. Therefore,it is useful to devise a totally different approach to packet jittermodeling.
Based on the observations that the existing SCFR methods inpacket networks are not rooted in optimal estimators and that di-rect modeling of packet jitter is nearly impossible, we propose anew adaptive clock method named KALP—Kalman filter-basedAdaptive clock method with Low-pass Prefiltering. The KALPis distinctive in that it models the packet jitter after shapingits characteristics by low-pass prefiltering. The low-pass pre-filtering contributes to the following two important points: First,it shapes the packet jitter into a low-pass signal irrespective of itsoriginal characteristics, thereby making it possible to effectivelymodel the prefiltered packet jitter using a simplefirst-order au-toregressive[AR(1)] process. Secondly, once the jitter compo-nent is AR(1)-modeled, it is possible to employ the KF as anoptimal estimator.
The organization of this paper is as follows. We first describethe KALP algorithm in detail in Section II, including the pro-cedures to determine the initial conditions of the KF and theAR(1) parameters. Then, in Section III, we carry out a com-parative study, through various simulation experiments, on theSCFR performances of the KALP and the existing buffer-basedadaptive clock method in terms of the frequency estimation errorand the receiver buffer state. Then, we conclude the discussionsin Section IV.

KIM AND LEE: KALP FOR PACKET NETWORKS USE 1219
II. THE KALP ALGORITHM
In this section, we describe the proposed KALP algorithm indetail. We first define the related clock frequencies and time pe-riods based on the operational assumptions on the system. Thenwe construct a state space model for the packet interarrival timeat the receiver and derive the source clock frequency estimationalgorithm based on this model. Next, we discuss the proceduresto determine the initial conditions for the KF and AR(1) param-eters, finally considering possible extensions of the KALP al-gorithm to address the issues of packet losses and time-varyingnature of the system.
A. Definition of Clock Frequencies and Time Periods
The system we consider in this paper consists of a sender,a packet network, and a receiver. The sender converts the in-coming data flow into a fixed-sized packet stream and transmitsit to the receiver via the packet network where each packet expe-riences random delay, i.e., packet jitter, whose statistical char-acteristics are assumed to be time-invariant. The service type ofthe incoming data flow (e.g., DS1 signal) is known to both thesender and the receiver, and for its transmission, the sender andthe receiver clocks should meet certain requirements specific tothe service type, which are described by a nominal value anda tolerance to the service clock frequency. Regarding the ser-vice clock generation at the sender and the receiver, we assumethat there are stable local clock sources that generate serviceclocks satisfying these requirements. This assumption impliesthat all the operations of the KALP algorithm at the receiver,including packet receiving, packet interarrival time measuring,and filtering, are done based on this local clock source. This isbecause we consider a packet network where no reference clockis available at both the sender and the receiver. So the local clocksource is the only reference that all operations rely on.
Based on this system model and the operational assumptions,we define clock frequencies and time periods with respect tothe local clock source at the receiver. Note that in most existingstudies the algorithms are described in terms of absolute clockfrequencies only, which are measured with respect to the ref-erence clock. These absolute clock frequencies may be used inderivation of an algorithm, but the final SCFR procedure actu-ally implemented at the receiver should be described in termsof clock frequencies defined with respect to the local clock be-cause by assumption, such a reference clock is not available atthe receiver. In the following, we define some useful clock fre-quencies and time periods based on both the conceptual refer-ence clock and the local clock at the receiver.
Packet size (bits).
Source clock frequency measured with respect to thereference clock (hertz).
Source clock frequency measured with respect to thereceiver clock (hertz).
Packet interdeparture time measured with respect tothe reference clock, which is defined as (sec-onds).
Packet interdeparture time measured with respect tothe receiver clock, which is defined as (seconds).
Receiver clock frequency measured with respect to thereference clock (hertz).Receiver clock frequency measured with respect to thereceiver clock (hertz).Nominal value for a service clock frequency specificto a service type (hertz).Tolerance to the nominal clock frequency (ppm).Nominal value for packet interdeparture time definedas (seconds).
We distinguish the clock frequencies/periods measured with re-spect to the reference clock from those measured with respectto the receiver clock by putting tildes on the former. Note that
and , where and are unknownat the receiver. So the problem of SCFR is now reduced to theestimation of , or equivalently , at the receiver.
B. Modeling of Packet Interarrival Times
As we consider a packet network with fixed packet size,the interdeparture time between two consecutive packets atthe sender is determined by the source clock frequency, and isconstant in the case of aconstant bit rate(CBR) service. Butthe interarrival time of the packets at the receiver deviates fromthe interdeparture time due to the packet jitter in the network.So the interdeparture time between theth and the thpackets at the sender, , and the corresponding interarrivaltime at the receiver may be expressed by
(1)
for the packet jitter that is defined as the difference betweendelays of two consecutive packets in the packet network. If thepacket jitter is AWGN, then the optimal estimation ofcan be easily achieved using the Kalman filter. In general, how-ever, the packet jitter has complicated statistical characteristicsthat cannot be modeled as AWGN [1], [7]. As discussed in Sec-tion I, it is practically impossible to exactly model the packetjitter as is. In [4], amaximum likelihood estimator(MLE)approach was employed instead, which could be a good choiceof estimator for the jitter of unknown statistical characteristics[8], but cannot be an optimal estimator. In addition, it does nottake advantage of thea priori information on the source clockfrequency and .
C. Estimation of Source Clock Frequency
The prefilter in the KALP is intended to transform the packetjitter into a low-pass signal, which then can be modeled bytheAR(1)process,oneof thesimplestmodelswith low-passchar-acteristic. The low-pass prefilter should be carefully selected notto lose timing information while prefiltering. As the moving av-erager satisfies this requirement and is simple to implement, wetake it as the low-pass prefilter for the KALP in this paper.
The packet interarrival time filtered by a moving averager oforder is given by
(2)

1220 IEEE TRANSACTIONS ON COMMUNICATION, VOL. 48, NO. 7, JULY 2000
If we denote by the moving-averaged jitter, i.e.,
(3)
then by (1) and (2), we get
(4)
Now that the noise component has become a low-pass signal, we may take the AR(1) process for its modeling, i.e.,
(5)
where denotes the AWGN whose average and variance are0 and 1, respectively, andand are weighting parameters.
If we apply the KF equations for the colored noise [9], thenwe obtain the following results.
• Initialization
(6)
• For
(7)
where , is the estimated value of , thevariance of the difference , and the Kalman gain.
D. Determination of Initial Conditions and AR(1) Parameters
The initial conditions of KF, and , thatwe need in implementing the KALP algorithm can be derivedfrom the nominal value and the tolerance of the service clockfrequency, which area priori information. Note that is arandom variable denoting the value of. Since the source clockand the receiver clock should meet these requirements for theservice clock frequency, we get
In order to model the uncertainty in the source and receiverclock frequencies, we define two random variablesandto denote the source and the receiver clock frequencies respec-tively measured with respect to the reference clock. The prob-ability distributions for and are usually determined bythe manufacturing process as well as the type of clock source(e.g., quartz) [10]. In this paper, we assume, as an example, that
and have a uniform probability distribution in. Note, however, that the following
derivation is not bound by this uniform distribution assumption.Since , , and ,
we have
(8)
and hence we get
(9a)
(9b)
Considering that , we may rewrite (9) as
(10a)
(10b)
The AR(1) parameters and , which are used in modelingprefiltered packet jitter, can be obtained before applying theKALP algorithm by the following procedure. The incomingpackets are stored in the receiving buffer for a certain durationof time (which is called smoothing delay) until about half thebuffer is filled up, before being read out of the buffer. Thisprebuffering helps to reduce the effect of packet jitter on theoperation of packet read-out and to prevent underflow. Duringthis prebuffering, we can gather data on the packet interarrivaltimes for use in deriving AR(1) parameters. In implementingthe KALP algorithm, we initialize the internal registers ofthe moving averager to such that even the firstdata can be used in estimating the AR(1) parameters. In thisestimation we may employ a common off-line algorithm suchas the covariance method [11].
E. Considerations for Practical Application of KALPAlgorithm
For practical application of the KALP algorithm, it is neces-sary to be able to handle the packet loss problem. Packet losscould be a critical source of clock recovery error by generatinga gap in the received packet stream as the KALP algorithmrelies on the interarrival times in retrieving the source clockfrequency. Fortunately, we can detect the existence of packetloss by checking the continuity of the packet sequence number.Therefore we can resolve the packet loss problem by inserting adummy packet into the receiving buffer whenever a packet lossis detected. At the same time, we insert a dummy datum whosevalue is set to the current estimation of into a data buffer,from which the stored packet interarrival times are read.
The time-invariant state space model in (4) may not prop-erly describe the time-varying nature of the real system. Thetime-varying nature stems from the deviation of thesource clockand thepacket jitter. The assumption underlying (4) that thesource clock is stable and its frequency or period is constant overtime is in fact reasonable as the clock sources used nowadaysare highly stable. As for the packet jitter, the AR(1) parametersused in modeling the prefiltered packet jitter are estimated usingthe information gathered during the prebuffering stage and aremaintained over the whole connection period. This should workwell in normal operation but may cause some residual error or

KIM AND LEE: KALP FOR PACKET NETWORKS USE 1221
Fig. 3. Configuration of the one-stage multiplexing system.
convergence delay in case there happens a big change in net-work traffic, as it will cause discrepancy between the modeledpacket jitter characteristics and the true ones. This problem maybe eased if we reset the KALP algorithm whenever the bufferlevel reaches the predetermined upper or lower threshold. It isalso possible, alternatively, to model the AR(1) parametersand as random work processes.
III. COMPARATIVE STUDY OF SCFR PERFORMANCES:KALP SCHEME VERSUSBUFFER-BASED
ADAPTIVE CLOCK METHOD
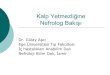
In this section, we carry out several simulation experimentsunder various network environments for a comparative studyof the SCFR performances of the KALP and the existingbuffer-based adaptive clock method [1]. First, we considera simple one-stage FCFS multiplexing system where thebackground traffic is all periodic. Secondly, in order to modela bursty characteristic of background traffic in real packetnetworks, we consider a three-stage FCFS multiplexing systemwhereMarkov-modulated Poisson process(MMPP) is used asthe background traffic model.
A. One-Stage Multiplexing System with Periodic BackgroundTraffic
In Fig. 3, we show the multiplexing system for simulationthat is similar to the one used in [1]. We assume that packet sizeis 1000 bits, but do not consider header or overhead separately.We take the output line rate of 150 Mb/s and connect ten CBRtraffic streams to the system as listed in Fig. 3, which corre-sponds to a traffic load of 0.999. We synchronize clocks of the10 input traffic streams at the frequencies, , and , whichare the nominal frequencies of DS1, DS2, and DS3 signals, re-spectively, and set the initial frequencies of the correspondingreceiver clocks at 1.5438, 6.311 79, and 44.735 109 MHz withthe frequency differences of 129.5, 33.26, and 19.91 ppm, re-spectively. We design the simulation such that packets are readin and read out discretely and 0.1 s (100 ms) of smoothing delayis allowed before the start of the SCFR algorithms.
As for the KALP algorithm, we assume the tolerance of 200ppm for each clock frequency and employ the order of 50 forthe moving averager. For the estimation of AR(1) parameters,we employ themodified covariance method[12].
As for the buffer-based method, we set the initial measure-ment time intervals of 1.0, 0.5, and 0.1 s for, , and , re-spectively, and stop adjusting the measurement time intervalswhen the frequency estimation error falls under 10 ppm.
In both the SCFR schemes, we measure the frequency estima-tion error and the buffer level whenever a change occurs in theirvalues during simulation. Note that the buffer level is measuredas the relative position with reference to the buffer position atthe beginning of the SCFR procedure. We limit the total simu-lation run time to 4.5 10 packet times, which corresponds to5 min of real time.
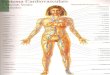
Fig. 4 plots the frequency estimation errors, and Tables I andII list the resulting frequency differences and buffer levels, re-spectively. Note that the maximum values in the tables denotethe maximum in absolute values and the same is true for the min-imum values. The initial and the minimum buffer levels, whichare always zero by definition, are not listed in the Table II. Inthe figures, we observe that the convergence speeds of both theSCFR methods depend on the packet rates of the sources, butthe dependency is weaker for the KALP scheme than for thebuffer-based method. This happens because the frequency esti-mation occurs at each packet service time in the KALP scheme,while it occurs once per several packet service times in thebuffer-based method. We also observe from the tables as wellas the figure that the KALP exhibits much faster convergencewith smaller residual error in all cases. In addition, we observethat the KALP scheme has less fluctuation in the buffer levelcompared to the buffer-based method for all CBR sources.
B. Three-Stage Multiplexing System with Bursty BackgroundTraffic
The first experiment was a fundamental one in which onlyone-stage multiplexing system was considered and the back-ground traffic sources were all CBR. As is well known, theextent of packet jitter of such a system is less than that of asystem that has correlated background traffic [1]. In addition, asthe packet flow that has experienced packet jitter has finite pe-riod, it is likely that the low-pass filtering has better effect on theCBR traffic system than on others. Therefore, in the second ex-periment, we consider a three-stage multiplexing system whichbetter simulates the real environment. In support of this, weuse the MMPP as the background traffic model, as it can better

1222 IEEE TRANSACTIONS ON COMMUNICATION, VOL. 48, NO. 7, JULY 2000
Fig. 4. Frequency estimation errors for (a) DS1 signal (~f = 1:544 MHz), (b) DS2 signal (~f = 6:312 MHz), and (c) DS3 signal (~f = 44:736 MHz).
TABLE IFREQUENCY DIFFERENCE (IN PPM) OF
ONE-STAGE MULTIPLEXING SYSTEM
reflect the bursty and correlated nature of real background trafficthan the Poisson process does [13], [14]. The MMPP we usein the simulation has two states, 0 and 1, whose sojourn timesare and , respectively. When the MMPP is in state
, the packet arrival process is Poisson with the packetarrival rate .
Fig. 5 shows the configuration of the three-stage multiplexingsystem we take for the experiment. The MMPP parameters forthe background traffic (BT) are as summarized in Table III. Theservice clock frequencies of the CBR sources 1 and 2 are 1.5
TABLE IIBUFFERLEVEL (IN PACKETS) OF ONE-STAGE MULTIPLEXING SYSTEM
and 50 MHz, respectively, and the corresponding initial receiverclock frequencies are set to 1.4997 and 49.99 MHz, respectively,which amount to the frequency deviation of 200 ppm. We takethe values of packet size, line bit rate, and smoothing delay to bethe same as those in the first experiment. In this case, the totaltraffic load becomes 0.6.
As for the KALP related parameters, we assume the toler-ance of 200 ppm for each clock frequency and take the sameAR(1) parameter estimation algorithm as before. We set theinitial measurement time intervals of the buffer-based adaptiveclock method to 1.0 and 0.5 s, respectively, for CBR sources 1and 2.
In this experiment we reduce the simulation time to 10packet, which corresponds to 66 s of real time, as it is satis-factory in comparing the performances of two adaptive clockschemes.

KIM AND LEE: KALP FOR PACKET NETWORKS USE 1223
Fig. 5. Configuration of the three-stage multiplexing system.
TABLE IIIMMPP PARAMETERS FORBACKGROUND TRAFFIC TYPES1 AND 2
Fig. 6. Frequency estimation errors for (a) CBR source 1 and (b) CBRsource 2.
Fig. 6 plots the frequency estimation errors obtained from theexperiment, and Tables IV and V summarize the resulting fre-
quency differences and buffer levels. From these results, we ob-serve that the convergence speed depends on the source packetrates, with the dependency becoming dominant for the buffer-based SCFR scheme than for the KALP scheme. For both CBRsources, the KALP exhibits much faster convergence speed withsmaller residual error. Further, the KALP exhibits better perfor-mance in the buffer level as it has much less fluctuation than thebuffer-based case.
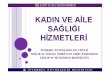
The differences in the performances of both the SCFRschemes in the first and second simulation experiments may beattributed to the background traffic that was periodic in the firstexperiment, while bursty and highly correlated in the secondexperiment. The effect of this background traffic characteristicscan be well demonstrated if we compare the power spectrumsof packet jitters of the first and second simulation experiments.Fig. 7 shows such spectrums for the first and the secondexperiments. Comparing plots in the figure, we observe that thepacket jitter of the periodic background traffic case has severalpeaks in the power spectrum, which reflects strong periodiccomponents, while the packet jitter of the bursty and correlatedbackground traffic case has a rather smooth power spectrum butwith significant amount of lower frequency component values,especially for higher rate sources, which make it difficult toestimate the source clock frequency. This indicates that thebursty and correlated characteristics of the background traffic,in general, deteriorate the performance of the SCFR schemes.Even with such bursty background traffic, the KALP schemestill manifests a better SCFR performance than the buffer-basedadaptive clock method does.
IV. CONCLUDING REMARKS
In this paper, we have introduced the new adaptive clockmethod KALP that properly employs the optimal Kalman es-timator for an efficient SCFR in packet networks. It overcomesthe difficulty of direct packet jitter modeling by transformingthe measured packet interarrival times into a low-pass signalthrough prefiltering and by applying the KF for the estimationof source clock frequency, with the prefiltered packet jitter mod-eled by AR(1) process. AR(1) process is one of the simplestmodels with a low-pass characteristic and the construction ofKalman filter is rather straightforward for the AR(1)-modelednoise. The low-pass prefilter should guarantee no timing infor-

1224 IEEE TRANSACTIONS ON COMMUNICATION, VOL. 48, NO. 7, JULY 2000
TABLE IVFREQUENCYDIFFERENCE(IN PPM)OF THREE-STAGE MULTIPLEXING SYSTEM
TABLE VBUFFERLEVEL (IN PACKETS) OF THREE-STAGE MULTIPLEXING SYSTEM
mation loss during the filtering process and indeed the movingaverager used in this paper satisfies this requirement. Further-more, our extensive simulation study (only part of which is in-cluded in this paper) showed that this approach results in goodoverall performances. The proposed KALP algorithm makes itpossible to effectively employ the optimal Kalman estimator forthe SCFR in packet networks. It is interesting to note that theuse of the optimal Kalman estimator is possible in the KALPowing to a simple but fundamental change in packet jitter mod-eling—from direct modeling to pre-shaped modeling.
Another feature of the KALP algorithm is that it employsa systematic approach in determining the design parametervalues. This is in contrast to existing adaptive clock methods,where no such systematic procedure was available, or designequations provided but were rooted in unrealistic assumptionson packet jitter. The KALP algorithm determines the designparameter values systematically based on the available infor-mation. It determines the initial conditions of KF based on apriori information on the service clock including the nominalvalue and the tolerance for the clock frequency that are specificto a given service type. Also the AR(1) parameters for theprefiltered packet jitter modeling can be obtained using thepacket interarrival times measured during the prebuffering(smoothing delay) process.
In the comparative study of the SCFR performances of theKALP scheme and the buffer-based adaptive clock method [1],we have carried out several simulation experiments under twodifferent network environments. First, we have considered asimple one-stage FCFS multiplexing system where backgroundtraffic is all CBR, and secondly, a three-stage FCFS multi-plexing system where MMPP’s are used as bursty backgroundtraffic models. From the simulation results, we have observedthat the convergence speed depends on the packet rates ofsources, but the dependency is weaker for the KALP schemethan for the buffer-based SCFR scheme. We have also observedthat the KALP scheme significantly reduces the fluctuation inthe level of a receiving buffer as well as the time to recover the
Fig. 7. Power spectral densities of packet jitters for (a) low-rate sources(DS1—, CBR source 1- -) and (b) higher-rate sources (DS3—, CBR source2- -).
source clock frequency in all cases considered. Further, we haveconfirmed that the bursty and correlated characteristics of thebackground traffic, in general, deteriorate the performances ofboth SCFR schemes, and that, even with the bursty backgroundtraffic, the proposed KALP scheme demonstrates better SCFRperformance than the existing buffer-based one.
ACKNOWLEDGMENT
The authors would like to thank the reviewers, especially Ed-itor Dr. R. Rao, for their constructive comments and suggestionsfor this paper.
REFERENCES
[1] R. P. Singh, S.-H. Lee, and C.-K. Kim, “Jitter and clock recovery forperiodic traffic in broadband packet networks,”IEEE Trans. Commun.,vol. 42, pp. 2189–2196, May 1994.
[2] B. G. Lee, M. Kang, and J. Lee,Broadband Telecommunications Tech-nology. Norwood, MA: Artech House, 1993.
[3] ITU-T, “B-ISDN ATM adaptation layer (AAL) specification: Type 1AAL,”, Recommendation I.363.1, Aug. 1996.

KIM AND LEE: KALP FOR PACKET NETWORKS USE 1225
[4] H. M. Ahmed, “Adaptive terminal synchronization in packet data net-works,” in Proc. GLOBECOM’89, 1989, pp. 728–732.
[5] K. S. Kim and B. G. Lee, “Three-level traffic shaper and its applicationto source clock frequency recovery for VBR video services in ATM net-works,” IEEE/ACM Trans. Networking, vol. 3, pp. 450–458, Aug. 1995.
[6] M.-K. Liu, “Using negative stuffing retiming for circuit emulationin a packet switching network,”IEEE Trans. Commun., vol. 40, pp.1522–1531, Sept. 1992.
[7] K. S. Kim, K. S. Seo, and B. G. Lee, “On jitter characteristics inmulti-node packet network environment: The white Gaussian noiseassumption is valid?,” inProc. ICT’99, vol. 2, June 1999, pp. 521–526.
[8] F. Lewis,Optimal Estimation With an Introduction to Stochastic ControlTheory. New York: Wiley, 1986.
[9] C. K. Chui and G. Chen,Kalman Filtering With Real-Time Applications,2nd ed. New York: Springer-Verlag, 1990.
[10] D. R. Smith, Digital Transmission Systems, 2nd ed. New York:Chapman & Hall, 1993.
[11] L. Ljung, System Identification: Theory For the User. EnglewoodCliffs, NJ: Prentice-Hall, 1987.
[12] , System Identification Toolbox For Use With MATLAB: The MathWorks, Inc., 1993.
[13] H. Heffes and D. M. Lucantoni, “A Markov modulated characteriza-tion of packetized voice and data traffic and related statistical multi-plexer performance,”IEEE J. Select. Areas Commun., vol. SAC-4, pp.856–868, Sept. 1986.
[14] J. W. Lee and B. G. Lee, “Performance analysis of ATM cell multiplexwith MMPP input,” IEICE Trans. Commun., vol. E75-B, pp. 709–714,Aug. 1992.
Kyeong Soo Kim(S’89–M’97) was born in Taejeon,Korea, on September 7, 1966.
He received the B.S., M.E., and Ph.D. degrees, allin electronics engineering, from Seoul National Uni-versity, Seoul, Korea, in 1989, 1991, and 1995, re-spectively.
From 1996 to1997, he was engaged in develop-ment of multichannel ATM switching systems as aPostdoctoral Researcher at Washington University,St. Louis, MO, where he also taught courses as anInstructor of Washington University and Adjunct
Professor of University of Missouri, St. Louis. Since 1997, he has beenworking with the PON Systems Research and Development organization ofLucent Technologies, and he is responsible for the development of ATM-PONsystems, which won the 1999 Bell Laboratories President’s Silver Award.His current research interests include theoretical study and architectures andsystems development in high-speed integrated networks including ATM-PONand ATM switching systems, ATM/B-ISDN traffic control, synchronization inpacket networks, and applications of DSP in telecommunications.
Byeong Gi Lee(S’80–M’82–SM’89–F’97) receivedthe B.S. and M.E. degrees from Seoul NationalUniversity, Seoul, Korea, in 1974, and KyungpookNational University, Taegu, Korea, and 1978,respectively, both in electronics engineering. Hereceived the Ph.D. degree in electrical engineeringfrom the University of California, Los Angeles, in1982.
He was with the Electronics Engineering Depart-ment of ROK Naval Academy as an Instructor andNaval Officer in active service from 1974 to 1979. He
was with Granger Associates, Santa Clara, CA, from 1982 to 1984 as a SeniorEngineer responsible for applications of digital signal processing to digital trans-mission, and with AT&T Bell Laboratories, North Andover, MA, from 1984 to1986 as a Member of Technical Staff responsible for optical transmission systemdevelopment along with related standard works. In 1986, he joined the facultyof School of Electrical Engineering, Seoul National University, where he is aProfessor. He is a co-auhor ofBroadband Telecommunication Technology, 2nded., (Norwood, MA: Artech House, 1996) andScrambling Techniques for Dig-ital Transmission(New York: Springer Verlag, 1994). He holds six U.S. patentswith two more patents pending. His current fields of interest include signal pro-cessing, communication systems, and integrated telecommunication networks.
Dr. Lee is a Member of the National Academy of Engineering of Korea, aMember of the Board of Governors of IEEE ComSoc, and a member of SigmaXi. He is the Associate Editor-in-Chief of the Journal of Communications andNetworks, the past Editor of the IEEE Global Communications Newsletter, anda past Associate Editor of the IEEE TRANSACTIONS ONCIRCUITS AND SYSTEMS
FOR VIDEO TECHNOLOGY. He is the Director for Membership Programs De-velopment, the past Director of Asia Pacific Region, and a Member-at-Largeof IEEE Communications Society (ComSoc). He is the Chair of the APCC(Asia Pacific Conference on Communications) Steering Committee, and wasthe Chair of the ABEEK (Accreditation Board for Engineering Education ofKorea) Founding Committee. He received the 1984 Myril B. Reed Best PaperAward from the Midwest Symposium on Circuits and Systems and ExceptionalContribution Awards from AT&T Bell Laboratories.