Embed Size (px)
Citation preview

June 12-14, 2013, Ottawa, Canada
From dual- to triple-frequency PPP: method, problems and application in California
Jianghui Geng, Yehuda Bock
Scripps Institution of OceanographyUniversity of California San Diego

Precise point positioning: reaching full potential
Precise point positioning ambiguity resolution (PPP-AR)
• PPP-AR has been developed since 2008– “Uncalibrated phase delay” by GFZ/Nottingham/Wuhan– “Integer clock” or “decoupled clock model” by CNES/NRCan– Single receiver ambiguity resolution by JPL– etc.
CNES/NRCanGFZ/Nottingham/Wuhan
ClocksClocksEquipment biases, etc.Equipment biases, etc.AmbiguitiesAmbiguities
GIPSY 6.0 by JPL
Atmospheric corrections
Atmospheric corrections
Augmented PPP-RTK

Precise point positioning: reaching full potential
Real-time PPP-AR system in Scripps for earthquake early warning
Generate Satellite Clocks
Generate Satellite Clocks
Generate Fractional-
Cycle Biases
Generate Fractional-
Cycle Biases
Predicted orbits from
IGS
Predicted orbits from
IGS
ITRF positions &
metadata(SOPAC)
ITRF positions &
metadata(SOPAC)
PPP client with accelerometersPPP client with accelerometers RTK UserRTK User
CRTNServerCRTNServer
75 stations used as reference stations which are located >200 km away from western US coast
Real-Time Data,
Various Servers
Real-Time Data,
Various Servers
Other UsersOther Users
Generate California-Based Troposphere and
Ionosphere Model
Generate California-Based Troposphere and
Ionosphere ModelRTCM3
Operational

Precise point positioning: reaching full potential
Typical performance: fixed solutions for 25 days
Precise point positioning: reaching full potential
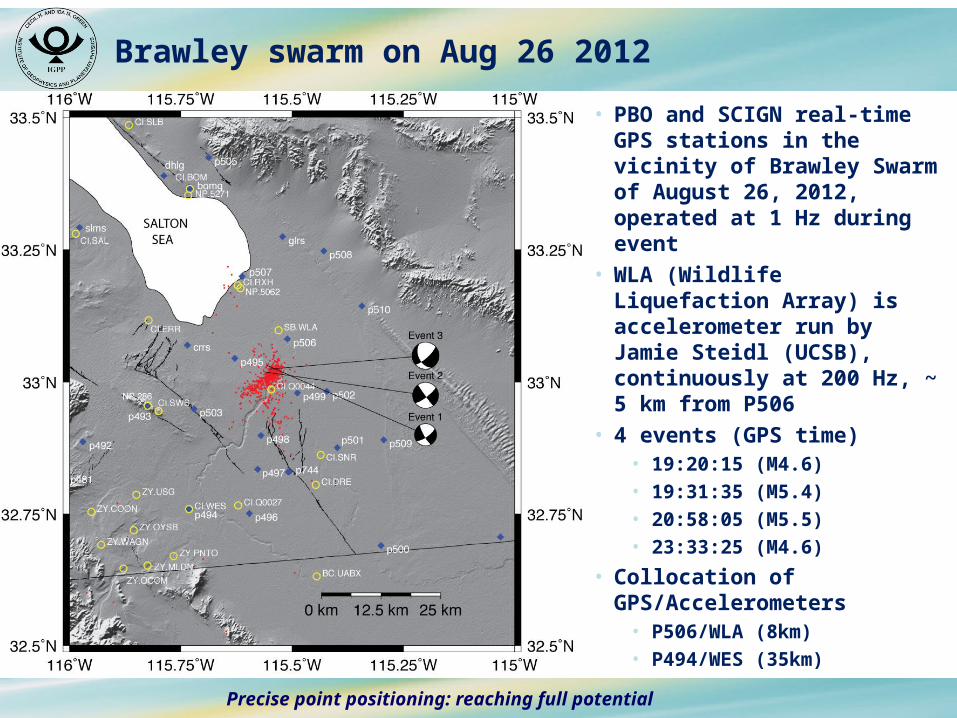
Brawley swarm on Aug 26 2012
• PBO and SCIGN real-time GPS stations in the vicinity of Brawley Swarm of August 26, 2012, operated at 1 Hz during event
• WLA (Wildlife Liquefaction Array) is accelerometer run by Jamie Steidl (UCSB), continuously at 200 Hz, ~ 5 km from P506
• 4 events (GPS time)• 19:20:15 (M4.6)• 19:31:35 (M5.4)• 20:58:05 (M5.5)• 23:33:25 (M4.6)
• Collocation of GPS/Accelerometers
• P506/WLA (8km)• P494/WES (35km)

Precise point positioning: reaching full potential
Example: GPS waveforms in real time for Event 3 M5.5
Precise point positioning: reaching full potential
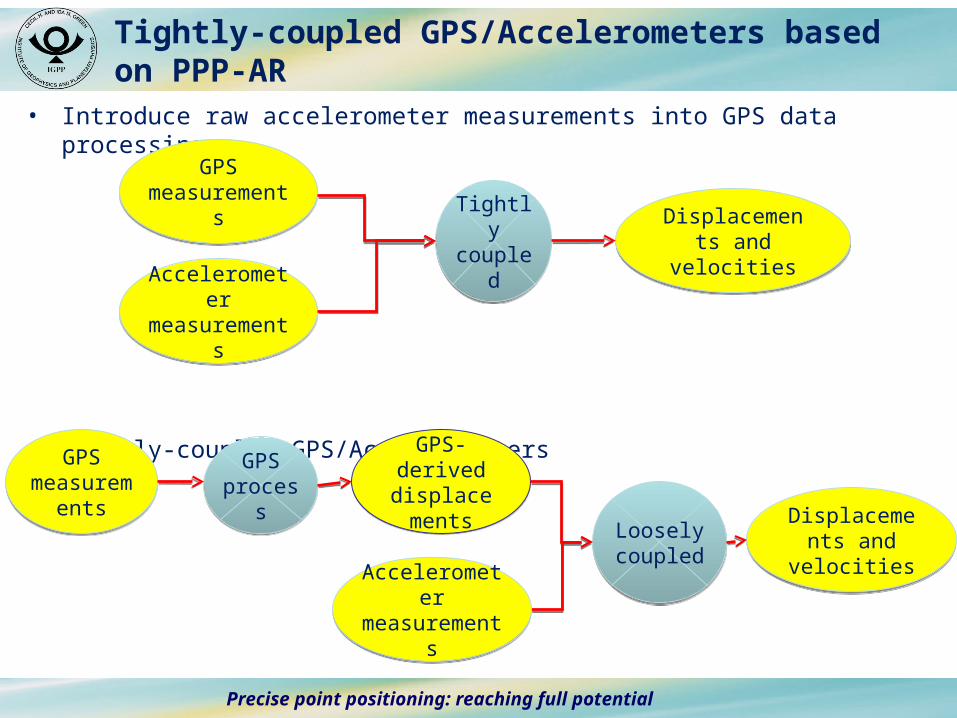
Tightly-coupled GPS/Accelerometers based on PPP-AR
• Introduce raw accelerometer measurements into GPS data processing
• Loosely-coupled GPS/Accelerometers
Displacements and velocitiesDisplacements and velocities
GPS measurements
GPS measurements
Accelerometer measurementsAccelerometer measurements
Tightly coupledTightly
coupled
Displacements and velocitiesDisplacements and velocities
GPS-derived displaceme
nts
GPS-derived displaceme
ntsLoosely coupledLoosely coupled
GPS measureme
nts
GPS measureme
nts
Accelerometer measurementsAccelerometer measurements
GPS process
GPS process

Precise point positioning: reaching full potential
Improvement of ambiguity resolution performance

Precise point positioning: reaching full potential
Brawley Seismic Swarm: Comparison of seismogeodetic and broadband seismometer velocity waveforms
P494/WES (80 m apart), 35 km from hypocenter
Mw 5.5
Mw 4.6
Mw 4.6
Mw 5.4

Precise point positioning: reaching full potential
Solutions in dual-frequency PPP for fast convergence
• Partial solution: rapid re-convergences/Cycle-slip repair
• Unsatisfactory solution: precise ionosphere products, e.g. dense augmentation network, ionosphere tomography, etc.

Precise point positioning: reaching full potential
Triple-frequency PPP
• Enable rapid ambiguity resolution for triple-frequency PPP– Triple-frequency means various combinations of frequencies for long wave-
length observable
– Resolve ambiguities for long-wavelength observable
– Using the resolved long-wavelength observable to constrain the ambiguity resolution of short-wavelength observable

Precise point positioning: reaching full potential
A method for triple-frequency PPP
• Basic carrier-phase equation:
• Step 1: resolve extra-wide-lane ambiguity with a wavelength of 5.8m• Step 2: resolve wide-lane ambiguity with a wavelength of 3.4m, but the noise is
amplified by 100 times.
– Wide-lane ambiguity resolution can still be very efficient
• Step 3: with ambiguity-fixed ionosphere-free (AFIF) wide-lane carrier-phase, resolve narrow-lane ambiguity (0.1m wavelength)
AFIF observations

Precise point positioning: reaching full potential
Data simulation
• GSS8000 hardware simulator by Spirent• Septentrio receiver• Troposphere delay: RTCA06• Ionosphere delay: Klobuchar• Receiver antenna level pattern is applied
– Elevation-dependent attenuation• Use default satellite orbit and satellite clocks• Land mobile multipath effect
– Rural environment– <15°, reflected signals only– <40°, allow reflected signals

Precise point positioning: reaching full potential
How AFIF carrier-phase outperform pseudorange?
• Position accuracy with ionosphere-free pseudorange (Dural-frequency PPP)• Position accuracy from ambiguity-fixed ionosphere-free carrier-phase (triple-frequency PPP)

Precise point positioning: reaching full potential
How AFIF carrier-phase outperform pseudorange?
Session Sigma_L1 (mm)
Sigma_L2 (mm)
Sigma_L5 (mm)
Sigma_AFIF (mm)
1 0.7 1.8 0.6 136.7
2 1.0 2.7 1.0 207.1
3 1.5 6.3 1.5 466.6

Precise point positioning: reaching full potential
Success rate & correctness rate of ambiguity fixing

Precise point positioning: reaching full potential
Interrupt every 30 s
Interrupt every 120 s
Multipath effects
Interrupt every 30 s
Interrupt every 120 s
Precise point positioning: reaching full potential
Question 1: optimum combination?
• Do we have to use ionosphere-free combinations or not?– How residual ionospheric delays affect hardware bias estimation?– What if the residual ionospheric delays are small enough?
• What are the optimum combinations?– Which combinations are used depends on not only PPP users, but also
satellite clock providers– How to define satellite clock products in future for multi-frequency and
multi-constellation GNSS?
• What if we have 4, 5 … frequencies?– Do we have to look for the optimum again and again?

Precise point positioning: reaching full potential
Question 2: A general way to PPP?
• Do we have to manually look for the optimum combinations?– We can use raw observation equations– LAMBDA method
• Multi-frequencies: the problem is how b_1, b_2 … B_1, B_2 …affect the clock, ionosphere parameters?
• Can multi-frequency clocks be used for dual-frequency data processing?

Precise point positioning: reaching full potential
Summary and conclusions
• Dual-frequency PPP-ambiguity resolution improves positioning accuracy, but not convergence speed to ambiguity-fixed solutions.
• Triple-frequency PPP can speed up convergences to ambiguity-fixed solutions from a few tens of minutes to a few minutes.
• Potential of multi-frequency PPP has not been exploited, especially in how to design a general way to do multi-frequency PPP.
• Satellite clock product may need to be re-defined to accommodate the future multi-frequency signals.





























